Relación Señal-Ruido en Astrofotografía Digital de Cielo Profundo
Bases teóricas y aplicación prácticaAntonio Fernández
antonio@afernandez.netVersión 1.1, Marzo 2006
La astrofotografía digital de cielo profundo representa un importante desafío, entre otras razones, porque se trata de registrar señales extremadamente débiles en circunstancias casi siempre adversas.
Una vez que se tiene cierto dominio de los aspectos puramente mecánicos, como son enfoque y seguimiento, el siguiente obstáculo al que se enfrenta el astrofotógrafo aficionado es obtener datos con una buena relación señal-ruido y en cantidad suficiente para que, después de un adecuado procesado de los mismos, se puedan obtener imágenes de calidad.
La forma más eficiente de incrementar la relación señal-ruido es mantener controlado el ruido durante la adquisición y la reducción/calibración de los datos. Este artículo pretende introducir los elementos teóricos básicos que explican la relación señal-ruido en astrofotografía digital y dar algunas recomendaciones de tipo práctico que ayuden a llevar a cabo esta difícil tarea de la lucha contra el ruido con más confianza.
Las recomendaciones prácticas están orientadas a la obtención de imágenes de alta calidad y no es necesario conocer la base teórica para aplicarlas eficientemente por lo que el lector que no esté interesado en los aspectos teóricos puede ir directamente a la sección Aplicación Práctica.
Bases Teóricas
Sensores CCD
En la mayoría de las cámaras digitales para astrofotografía la imagen se forma a partir de la luz que recoge un dispositivo de carga acoplada, también denominado sensor o detector CCD por sus siglas en inglés (CCD, Charge Coupled Device). Además de los CCD, existen otros fotodetectores basados en la tecnología CMOS que emplean algunos fabricantes de cámaras réflex digitales (DSLR) como es el caso de Canon. Aunque en este artículo se hace énfasis en los sensores CDD, la mayoría de los conceptos que aquí se tratan aplican a ambos tipos detectores.
El detector CCD está formado por una matriz de pequeños pozos de sección cuadrada o rectangular en cuyo fondo hay un sustrato de silicio fotosensible. La luz recogida en cada uno de los pocillos dará lugar a los "elementos pictóricos" (pixels, del inglés picture elements) que formarán la imagen final. Por esta razón el término pocillo y pixel con frecuencia se utilizan como sinónimos (p.e. se habla de tamaño de pixel en vez de tamaño de pocillo) aunque en sentido estricto no lo sean.
Cuando los fotones de luz chocan con el sustrato de silicio del CCD se liberan electrones. Este fenómeno, que se denomina efecto fotoeléctrico, fue descrito por Albert Einstein y fue la razón por la que recibió el premio Nobel de Física en 1921.
Durante la exposición a la luz, los pocillos del CCD se polarizan externamente con una corriente eléctrica. Esto permite que los electrones, que tienen carga negativa, al ser liberados del sustrato por el efecto fotoeléctrico migren a la zona positiva y se acumulen allí. Al final de la exposición el número de electrones acumulados será proporcional a la cantidad de luz (señal) recibida.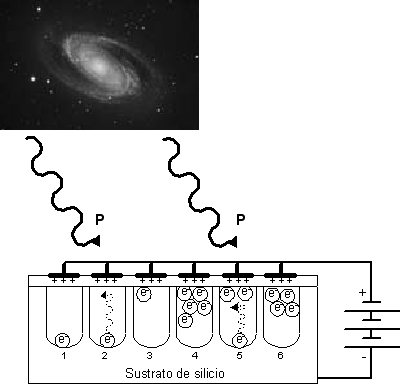
Figura 1. Funcionamiento de un sensor CCD. Durante la exposición los pocillos están polarizados y los electrones permanecen en el sustrato de silicio (1), cuando un fotón (P) alcanza el pocillo la energía que suministra permite que un electrón del sustrato se libere (2) y se mueva hacia la zona con polaridad positiva (3) de esta forma los pocillos se van llenando de electrones (4).
El número de electrones que se pueden acumular en cada pocillo es limitado, depende del tamaño y de otras especificaciones del CCD. Al número máximo de electrones que se pueden acumular en un pocillo se le denomina capacidad de pozo completo (full-well capacity). Esta es una característica muy importante de los sensores CCD y va desde una pocas decenas de miles de electrones hasta varios cientos de miles.
Otro parámetro importante que hay que tener en cuenta es la eficiencia cuántica (QE, Quantum Efficiency) del sensor. La eficiencia cuántica es la capacidad que tiene el sensor para convertir fotones de luz en electrones que dan lugar a señales eléctricas. De acuerdo con el principio fotoeléctrico, en un detector ideal cada fotón (P) recibido produciría la acumulación de un electrón (e-) en el pocillo. Este sistema hipotético tendría una eficiencia de uno (1e- / 1P = 1) o del 100% si se prefiere hablar en porcentajes. Desgraciadamente esto no ocurre siempre así, debido a las ineficiencias del sistema y lo normal es que no todos los fotones recibidos produzcan la acumulación del electrón correspondiente. En un CCD con una eficiencia cuántica del 50% será necesario recibir dos fotones para acumular un electrón ( 1e- / 2P = 0,5 = 50%). Si el flujo de fotones -número de fotones recibidos por unidad de tiempo- es constante, como es el caso de la fotografía astronómica, la cámara con un QE del 50% necesitará el doble tiempo para acumular la misma señal que la de QE 100%. Para un mismo sensor la QE es diferente en función de la la longitud de onda, y por tanto el color, de los fotones. Los objetos astronómicos tienen diferentes colores predominantes (p.e. en las nebulosas de emisión predomina la luz de color rojo mientras que en las galaxias el espectro está mucho más equilibrado) por lo que hay que tener en cuenta la QE en función del color predominante en el objeto. Algunos fabricantes de CCDs (p.e. Kodak) publican los datos de la QE en función de la longitud de onda mientras que otros (p.e. Sony) no publican datos de QE.
Para poder formar una imagen digital a partir de la de la señal analógica formada por los electrones acumulados en el sensor es necesario medir el número de electrones en cada pocillo y convertir esta medida en un valor que indique la cantidad de señal recogida. En otras palabras, es necesario hacer una lectura del contenido del sensor al concluir la exposición y registrar los datos leídos. Para hacer esta lectura, la señal analógica del sensor se amplifica y a continuación se digitaliza en un conversor analógico-digital (ADC ó DAC, Digital-Analog Converter). La señal digitalizada se mide en unidades analógico-digitales (ADU, Analog-Digital Units), también llamadas "cuentas" (counts). Al final de este proceso los datos resultantes se puedan guardar en un archivo de datos que habrá que procesar para obtener la imagen final.
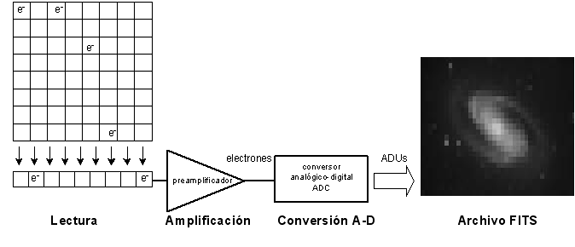
Figura 2. Lectura del sensor CCD. Al concluir la exposición el contenido en electrones de los pocillos se transfiere a los registros de lectura, la señal se amplifica y a continuación se convierte de analógica en digital. De esta forma las cargas electrónicas se contabilizan en ADUs (Analog-Digital Units, unidades analógico digitales). Después de la digitalización la información se guarda en un archivo de imágen.
Señal y Ruido
En el caso de la fotografía astronómica con cámaras CCD, se considera que la señal son los electrones acumulados en el detector por efecto de los fotones que provienen del objeto astronómico que se desea fotografiar. Pero los sensores CCD no sólo registran datos provenientes del objeto "deseado" sino también de otras fuentes "no deseadas". A estas señales "no deseadas" y que también quedan registradas, bien en el sensor durante la exposición, bien durante el proceso de lectura y conversión analógico-digital o durante el procesado de las imágenes, se les llama ruido.
Cuando la cantidad de señal recibida es muy grande esta destaca por encima del nivel del ruido y es fácil de distinguir. En el caso de la fotografía digital con luz de día, o en fotografía planetaria, la señal es muy alta por lo que el ruido queda muy empequeñecido en términos relativos y resulta difícil de percibir, se dice entonces que la relación señal ruido (SNR, signal-to-noise ratio) es alta.
En astrofotografía de cielo profundo ocurre lo contrario, la señal es débil y por tanto la relación señal ruido (SNR, signal-to-noise ratio) con frecuencia es baja, lo que hace difícil el diferenciar una del otro. Esto sucede porque durante la detección señal y ruido tienen exactamente la misma naturaleza: ambos producen electrones, por lo que si se dan en cantidades parecidas se entremezclan y son difíciles de distinguir entre sí. Además el ruido da siempre lugar a incertidumbre en la medida de la señal: cada lectura es diferente y no se sabe cual es la "verdadera". Cuando esto sucede, el ruido se define matemáticamente como el valor de una desviación estándar de los valores obtenidos en las diferentes mediciones efectuadas.
Cuando el ruido es estadísticamente aleatorio, lo que también se llama ruido estocástico, la incertidumbre en la medición de la señal tiene una importante propiedad y es que sigue una distribución de probabilidades que se conoce como distribución de Poisson. En una distribución de Poisson la desviación estándar es igual a la raíz cuadrada de la media de los valores obtenidos, por lo que el ruido (N), es proporcional a la raíz cuadrada de la señal (S).
 [1]
[1]Esta propiedad de la distribución de Poisson tiene importantes aplicaciones prácticas. Entre otras, permite recurrir a métodos estadísticos para aumentar la relación señal ruido como es la combinación de varias exposiciones. La razón por la que esto se puede hacer es que, como se ha dicho ya, determinados tipos de ruido son puramente aleatorios mientras que la señal no lo es. al combinar varias exposiciones la señal aumenta de forma proporcional al número de exposiciones mientras que el ruido lo hace de forma proporcional a la raíz cuadrada del número de exposiciones, lo que explica porqué la relación señal ruido aumenta.
En cualquier caso, antes de presentar tácticas para maximizar la relación señal-ruido en astrofotografía digital durante y después de la adquisición de los datos es necesario entender de donde proviene el ruido y que relación guarda con la señal.
Fuentes de Ruido durante la Adquisición de la Imagen
Las tres fuentes más importantes son: Ruido Fotónico (Photon Noise, Pn), Ruido de Corriente Oscura (Dark Current Noise, Dn) y Ruido de Lectura (Read-out Noise, Ron).
Ruido Fotónico (Photon Noise, Pn)
La señal detectada por el CCD depende del flujo de fotones que llega al sensor procedentes del objeto (Eobj) y del cielo de fondo (Esky), de la eficiencia cuántica (QE) y del tiempo (t) que dura la exposición. El ruido se produce porque el flujo de fotones que llega al CCD proveniente del objeto y del cielo de fondo no es constante sino que está sometido a pequeñas variaciones. Esta variación, que se debe a la naturaleza cuántica de la luz, sigue una distribución de Poisson por lo que el ruido fotónico de la señal del objeto (también denominado ruido de disparo, shot noise) recogida en un pixel sería:
 [2]
[2]donde: Eobj = flujo fotónico del objeto en fotones/segundo, QE = eficiencia cuántica y t =tiempo en segundos
En el caso de la señal del fondo de cielo (Esky) el ruido fotónico (SkyN) en un pixel sería:
 [3]
[3]donde: Esky = flujo fotónico del fondo de cielo en fotones/segundo QE = eficiencia cuántica t =tiempo en segundos
Ruido de Corriente Oscura (Dark Current Noise, Dn)
A temperaturas superiores a los 0 Kelvin (-273º C) todos los sensores producen cargas electrónicas en los pocillos de forma espontánea, sin que haya señal. Cuanto mayor es la temperatura del sensor y el tiempo que permanece polarizado más electrones se producen por el calor. A este fenómeno se le denomina corriente oscura (Dark Current, Dc). La corriente oscura de un mismo pocillo varía ligeramente de una exposición a otra. Esta variación de la corriente oscura es la que da lugar lugar al Ruido de Corriente Oscura (Dark Current Noise, Dn). Al igual que ocurre con el ruido fotónico, el ruido de corriente oscura también sigue la distribución de Poisson por lo que
 [4]
[4]donde: Dn = ruido de corriente oscura en electrones, Dc = corriente oscura en electrones/segundo y t= tiempo en segundos.
Las exposiciones prolongadas, en ausencia de refrigeración activa, incrementan la temperatura del sensor por lo que aumenta la corriente oscura y el ruido de corriente oscura. La mejor forma de combatir el ruido de corriente oscura es enfriar el sensor durante la adquisición. Posteriormente se puede restar la corriente oscura de las imágenes adquiridas reduciendo los datos con tomas de calibración en ausencia de señal (darks). Dependiendo del fabricante y tipo de CCD la corriente oscura puede ser muy homogénea en todos los pocillos del detector (p.e, CCDs con tecnología HAD de Sony) o variar de unos a otros (p.e. CCDs de las series KAF o KAI de Kodak). Con estos últimos las tomas sin reducir pueden presentar un aspecto ruidoso, aunque sólo es aparente porque la reducción con darks resta la corriente oscura de forma muy eficaz y ecualiza los niveles todos los pixeles. Lo que no restan los darks es el ruido de corriente oscura por lo que la mejor forma de minimizar este ruido es enfriando bien el detector.
El control de este tipo de ruido es un problema importante en las cámaras no refrigeradas, como es el caso de las réfex digitales (DSLR), donde la duración de máxima de la exposición puede está limitada por la corriente oscura que va aumentando a lo largo de la exposición, dado que durante la exposición la temperatura del sensor aumenta de forma progresiva.
Ruido de Lectura (Read-out Noise, Ron)
El Ruido de Lectura (Ron) tiene su origen en las variaciones que la cámara introduce durante la recuento de la señal una vez finalizada la exposición y en la conversión analógica-digital. El ruido se produce porque diferentes lecturas de la misma carga de electrones no dan el mismo valor, lo que introduce una incertidumbre en cada lectura. Estas diferencias se producen por muchas razones, entre otras están la tolerancia y calidad de los componentes electrónicos utilizados y el diseño de los circuitos de la cámara. El hecho de que la señal tenga que ser amplificada antes de la conversión AD y el ruido térmico que produce el propio preamplificador también contribuyen a incrementar el ruido de lectura.
El ruido de lectura del sistema -Ron del conjunto sensor, amplificador y convertidor AD- es uno de los parámetros más importantes de una cámara CCD, cuanto más bajo sea el ruido de lectura mayor será el intervalo dinámico (Dynamic Range, DR) de la cámara (DR = full-well-capacity /Ron) lo que permite una mayor riqueza de matices en la señal dado que el intervalo dinámico de la cámara representa el número de niveles que esta puede "distinguir".
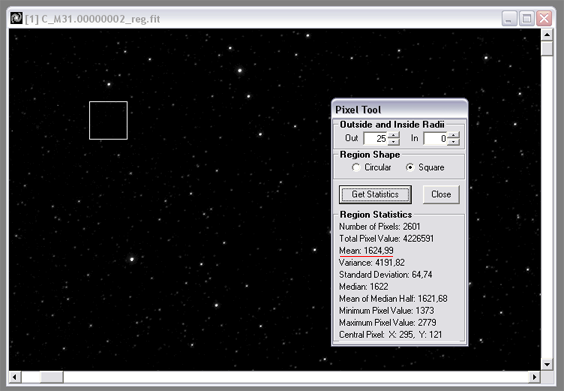
Una forma sencilla de medir el Ron, hay otras formas más precisas, consiste en medir la desviación estándar (SD, s) de los valores en los pixeles de una toma BIAS (*). Como los valores de los pixeles son ADUs hay que convertir a electrones RMS multiplicando por la ganancia de la cámara.
 [5]
[5]donde: Ron = ruido de lectura en e- RMS g = ganancia de la cámara en e-/ADU sbias = desviación estándar de los pixeles del bias en ADU
(*) Un BIAS es una toma sin señal (oscura, dark) hecha con el tiempo de exposición más breve que permita la cámara. Al no haber señal por ser un dark, ni corriente oscura por la brevedad de la exposición, el único tipo de ruido presente en la imagen de la toma debería ser el ruido de lectura del sistema.
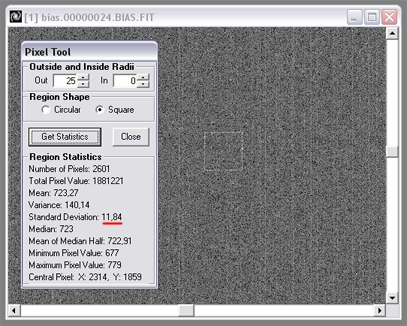
Figura 3. Ruido de Lectura. En el ejemplo de la figura se puede ver como la desviación estándar en una zona localizada en el centro del BIAS (sbias) es de 11,84 ADU, la cámara es una SBIG STL11000M y tiene una ganancia de 0,84 electrones/ADU por lo que el ruido de lectura es de 10 electrones RMS. Como la full-well-capacity es de 50.000 electrones, el intervalo dinámico de la cámara es de 5000 (50000 e-/10 e- RMS).
Relación Señal-Ruido
El ruido que producen las diferentes fuentes es aleatorio (no correlacionado) por lo que se combinan de forma cuadrática, es decir el ruido total (N) al cuadrado es igual a la suma de los cuadrados de los ruidos de cada una de las fuentes de forma que
 [6]
[6]Por lo que el ruido total es
 [7]
[7]y la señal es
 [8]
[8]donde: Eobj = flujo fotónico del objeto en fotones/segundo QE = eficiencia cuántica t =tiempo en segundos
y por tanto, la relación señal-ruido
 [9]
[9]Sustituyendo cada uno de los parámetros por [2],[3],[4],[5] y [8] queda que la SNR es:
 [10]
[10]El numerador representa la señal que corresponde al flujo de fotones por segundo que provienen del objeto -después de pasar por la atmósfera y por la óptica- multiplicados por el tiempo que dura la exposición y la eficiencia cuántica de la cámara, el resultado es el número de electrones que quedan "atrapados" en el pocillo correspondiente.
En el denominador aparecen los cuatro componentes del ruido: el ruido fotónico del propio objeto, el ruido fotónico del cielo de fondo, el ruido que produce la corriente oscura durante el tiempo que dura la exposición y el ruido de lectura de la cámara.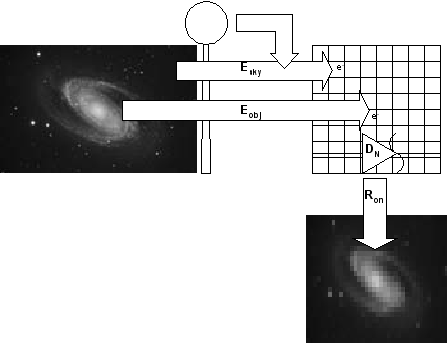
Figura 4. Componentes de la Relación Señal-Ruido. Eobj es la señal, el flujo fotónico proveniente del objeto. Esky es el flujo fotónico del fondo de cielo al que también se suman otras señales "no deseadas" como los fotones de la contaminación lumínica. Dn es el ruido que produce la corriente oscura en propio sensor y que depende del tiempo de exposición y de la temperatura. Ron es el ruido de lectura dela cámara.
Para poder empezar con aspectos más prácticos la expresión anterior se puede simplificar tal y como propone Smith (véase referencia 7). Si se asume que las tomas de luz van a ser posteriormente reducidas con tomas de calibración (darks) y que la cámara se va a enfriar, se puede prescindir de la corriente oscura y del ruido de corriente oscura. La medición del flujo fotónico del fondo de cielo (Esky) que se va a utilizar se hace a partir de los ADUs de la imagen de prueba así que se puede prescindir de la QE y la ganancia de la cámara porque ya están incluidos en esa medición. Por último, se asume que el ruido fotónico de la señal del objeto es muy pequeño en comparación con el del cielo de fondo con lo que la SNR simplificada queda así:
 [11]
[11]Llegados a este punto es importante destacar que no es apropiado hablar de la SNR de una imagen dado que la relación señal-ruido sólo tiene sentido cuando se analiza para un solo pixel en particular. Como las imágenes tienen diferentes niveles de señal según la zona, la SNR varía de un área a otra del sensor. Tomado el ejemplo de la figura 4 es fácil de entender que la SNR no es la misma en el núcleo de la galaxia, donde la señal es elevada, que en las áreas que corresponden al cielo de fondo. Aún así, con frecuencia se habla de la SNR de una imagen para referirse a la SNR que corresponde únicamente a la señal del cielo de fondo (Esky), por lo que a este respecto se puede utilizar la versión simplificada de ecuación SNR (11).
Aplicación Práctica:
Tácticas para incrementar la Relación Señal-RuidoAntes de debatir sobre como se maximiza la SNR cada astrofotógrafo debe tener en cuenta cuales son los factores sobre los que puede actuar. No siempre se puede controlar todo. Por ejemplo, no hay ninguna duda de que disponer de un telescopio de mayor abertura o un sensor con mayor eficiencia cuántica hacen que se obtenga una mayor cantidad de señal por tiempo de exposición, pero si ya se dispone de una cámara CCD, la eficiencia cuántica ya no es una variable, salvo que se adquiera otra y lo mismo ocurre con el telescopio, por lo que para optimizar la señal sólo se puede actuar sobre el tiempo de exposición. De la misma forma el tiempo máximo de exposición depende de otros factores como la refrigeración de la cámara, dado que la refrigeración evita el aumento de la corriente oscura en el tiempo. En las cámaras DSLR al no tener refrigeración activa el tiempo máximo estará limitado por el aumento de la corriente oscura. Otras veces son los factores mecánicos, como el guiado y seguimiento de la montura, los que ponen los límites a lo que sería el tiempo de exposición óptimo. En estos casos las tácticas basadas en la adquisición de un número mayor de tomas de luz de menor duración que la deseable pueden ser la mejor alternativa disponible para acumular señal y reducir el ruido de forma eficaz, aunque no sean la opción óptima. Se trata pues de conocer los diferentes factores con el objeto de actuar sobre los que se tiene control de forma que se pueda maximizar el rendimiento de acuerdo con el equipo y circunstancias disponibles.
Factores que contribuyen a optimizar la señal
Son los que ayudan a incrementar el flujo fotónico del objeto (Eobj) que llega al sensor y el tiempo de exposición (t). Algunos de estos factores son ambientales, como la buena transparencia y estabilidad atmosférica (seeing). Otros dependen del equipamiento disponible, por ejemplo, eficiencia de la óptica utilizada (p.e. con las mínimas superficies refractivas, mayor abertura, etc.), precisión de la montura o utilización de cámaras con alta QE para el tipo de objeto a fotografiar. A parte de estos factores hay dos sobre los que se puede actuar a corto plazo en muchos casos:
1.- Enfoque y guiado óptimos son fundamentales para evitar la dispersión de la señal y en el caso del guiado permitir . Estos dos aspectos son la fundación de una imagen de calidad y requieren de atención especial. Si la imagen no está bien enfocada todo el esfuerzo adicional es prácticamente estéril.
Recomendación Práctica.-
Hay que enfocar y re-enfocar... y volver a enfocar. Además hay que vigilar los cambios de temperatura, no sea que haya que volver a... enfocar. La mejor forma de hacer esto de forma cómoda y fiable es recurrir a sistemas de enfoque eléctrico (p.e. con motores paso a paso, tipo Robofocus) asistidos por el programa apropiado (p.e. Focusmax(R)) lo que permiten automatizar este proceso y hacerlo de cómodamente de forma repetida cuantas veces convenga.
Es importante mantener un buen enfoque y guiado para que cada señal se recoja en el mismo área del sensor durante el tiempo que dura la toma de luz. Eso sí, luego se verá que cambiar de pocillo después, y sólo después, de cada toma -la técnica se llama dithering- tiene importantes ventajas y ayuda mucho a mejorar la relación señal-ruido.
2.- Aumentar el tiempo de exposición: para aprovechar al máximo el intervalo dinámico de la cámara y alcanzar tiempos de exposición en los que el límite lo determina el ruido de fondo de cielo (Sky-Limited o Photon-Noise-Limited) como se verá más adelante.Obtener imágenes con un amplio y rico intervalo dinámico es muy difícil si no se ha aprovechado bien previamente el intervalo dinámico de la cámara. Es necesario llenar bien los pocillos del sensor para poder disponer de las máximas prestaciones que la cámara puede dar.
Se ha dicho anteriormente que el intervalo dinámico de la cámara es igual a la capacidad del pocillo completo divido por el ruido de lectura (DR = full-well-capacity /Ron). Por ejemplo, una cámara con un full-well-capacity de 100.000 electrones y 10 electrones RMS de ruido de lectura tiene un intervalo dinámico de 10.000 niveles. Eso quiere decir que la cámara puede distinguir entre 10.000 matices diferentes. Si durante la exposición no se permite que las partes más luminosas del objeto lleguen casi al nivel saturación esa riqueza de matices, esa profundidad de la imagen, se pierde y es muy difícil de recuperar por otros medios (p.e. a base de incrementar el número de tomas individuales). Si los pocillos donde la señal es más alta sólo se llenan con 30.000 electrones porque la exposición es corta, los niveles se verán reducidos a 3.000. El incremento del número de tomas y su posterior combinación ayuda mucho con el ruido y por eso mejora la SNR pero es muy importante recordar que no aumenta mucho la "profundidad" de la señal. La "profundidad" de la señal sólo se alcanza exponiendo el tiempo adecuado en cada toma individual. Si los pocillos están "anémicos" al final de la toma, la imagen final también lo estará.Factores que contribuyen a reducir el ruido
En este caso las tácticas están encaminadas a reducir el ruido fotónico del fondo de cielo (Esky), el ruido de corriente oscura (Dn) y el ruido de lectura (Ron) de la cámara
1.- Reducción del ruido fotónico del fondo de cielo (Esky)
El objetivo es aumentar el contraste entre señal del objeto y nivel del cielo de fondo mediante la disminución del umbral de ruido de fondo, es decir aumentar la SNR del objeto con respecto al fondo de cielo. La reducción del ruido de fondo de cielo es muy beneficiosa ya que los pocillos del CCD no se llenan con electrones "basura" (ruidosos) que se "comen" el intervalo dinámico de la cámara, por lo que si se une a un tiempo de exposición prolongado (p.e. sólo limitado por el ruido de fondo de cielo, como se verá más adelante) se optimiza el intervalo dinámico de la cámara.
Recomendación Práctica.-
1.1.- Fotografiar en cielos oscuros y en noches sin luna, especialmente cuando se utilicen filtros de banda ancha (p.e. de tipo L, R, G, o B)
1.2.- Evitar luces parásitas en la proximidad del CCD o del campo de visión del CCD
1.3.- En lugares con contaminación lumínica utilizar filtros de supresión tipo LPS, o restringir la fotografía a líneas de emisión con filtros de banda estrecha (p.e. H alfa, OIII, etc.)2.- Reducción del ruido de corriente oscura (Dn)
Recomendación Práctica.-
2.1.- Enfriar la cámara a la máxima temperatura que las circunstancias permitan.
Aunque la corriente oscura se resta muy bien durante la reducción (calibrado) de las tomas de luz con darks, la mejor forma de reducir el ruido de corriente oscura es enfriando el sensor, cuanto más mejor.
2.2.- Hacer la reducción de las tomas de luz con un dark maestro obtenido a partir de la combinación de muchos darks con exclusión sigma (Sigma Average).
En sensores en los que la distribución de corriente oscura no es muy homogénea (p.e. Kodak de las series KAF y KAI) es muy importante hacer darks y restar la corriente oscura para ecualizar los niveles en todos los pixeles. Una vez determinado el patrón de corriente oscura del sensor, mediante la combinación de varios darks en un dark maestro, la resta es muy eficaz porque el patrón de distribución es muy estable.La reducción con darks también tiene efectos no deseados: por un lado se resta la corriente oscura de forma muy eficaz pero por otro se introduce ruido adicional. La razón por la que la resta del dark introduce ruido es porque los propios darks en origen tienen ruido. Así que para minimizar el ruido que se introduce al reducir las tomas de luz lo que hay que hacer es combinar previamente muchos darks. El número de darks a combinar depende del nivel de ruido introducido durante la reducción que se esté dispuesto a tolerar.
Para hacer un promediado adecuado con exclusión sigma (Sigma Clipped Average) hacen falta al menos nueve darks de la misma duración que las tomas de luz individuales. El dark maestro que resulta de esta combinación contribuiría con menos del 5% de ruido de corriente oscura al ruido total de la imagen. Si se promedian entre 20 y 30 darks la contribución baja al 1%. El mínimo serían 3 tomas combinadas con la mediana (con tres tomas no se puede hacer una exclusión sigma como se verá más adelante) y la contribución al ruido total sería de un 10%.
Hay que tener en cuenta también que la reducción con darks sirve para corregir otros defectos que no están directamente relacionados con la corriente oscura como son los defectos en la fabricación del sensor que dan lugar a pocillos defectuosos, lo de que da lugar a pixeles calientes o pixeles muertos, o problemas en las columnas de la matriz del sensor.
En resumen, para los que deseen darks maestros cuasi-inmaculados con baja contribución de ruido (p.e. menos del 0,5%) 30 o más darks combinados con exclusión sigma no es un número nada exagerado.
3.- Reducción del ruido de lectura (Ron)
3.1.- Cámaras CCD refrigeradas: "Enterrando" el ruido de lectura en el ruido del cielo de fondo.En la mayoría de las cámaras CCD refrigeradas el ruido de lectura -y también la ganancia- es un parámetro fijo que depende de las características y el diseño de la cámara por lo que no se puede hacer mucho para reducir esta fuente de ruido.
En estas circunstancias la mejor estrategia para combatir el Ron es hacer que su contribución relativa al ruido total sea baja, menos de un 10%. Esto se consigue aumentando el tiempo de exposición de forma que el ruido dominante y de forma "aplastante" sea el producido por el flujo fotónico del cielo de fondo (Esky). Cuando se alcanza este tiempo de exposición se habla de exposiciones limitadas por el cielo (Sky-Limited exposure). Se considera que el ruido de lectura queda "enterrado" cuando su contribución al ruido total es menor de un 5%.
Por ejemplo, si se desea la contribución (p) del Ron sea de un 5% (0,05), la relación ruido total (N) ruido de fondo de cielo (SkyN) tiene que ser igual a (1+p) luego:
 [12]
[12]despejando N y sustituyendo el ruido de fondo del cielo por su equivalente en función del flujo fotónico y el tiempo de exposición queda:
 [13]
[13]Volviendo a la teoría, según la ecuación simplificada del SNR propuesta por Smith (7):
 [11]
[11] el ruido total (N) es
 [14]
[14]Si se sustituye N por su equivalencia en [13] y se despeja t se puede determinar el tiempo de exposición máximo (tmax) para que la contribución del Ron sea p.
 [15]
[15]
Si se desea que la contribución máxima al ruido (p) sea de un 5% (0,05) para que la exposición sea sky-limited la ecuación [15] queda de la siguiente forma:
 [16]
[16]
Para hacer el cálculo del tiempo máximo de exposición es necesario saber cual es el flujo fotónico (Esky) que depende del fondo de cielo que hay desde donde se va a fotografiar y el equipo que se va a utilizar (telescopio, cámara, filtros, etc). El Esky se calcula según la siguiente fórmula:
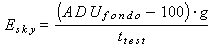 [17]
[17]donde ADUfondo es el promedio (mean ó average) de la cuentas (ADU) del fondo de cielo en un imagen de prueba calibrada con darks y flats, g es la ganancia de la cámara y ttest es la duración de la exposición utilizada para calcular ADUfondo.
A la hora de calcular el fondo en la mayoría de los casos hay que restar un "pedestal" de 100 cuentas si el programa de captura lo añade por su cuenta, (p.e. CCDsoft es de los que suma automáticamente el pedestal de 100 cuentas)
Ejemplo práctico: Para medir el fondo de cielo (ADUfondo) se ha cargado en el programa AIP una exposición de 5 minutos (300 s) tomada con el filtro de luminancia. La toma ha sido previamente calibrada con dark y flat maestros.
Utilizando la herramienta de medición estadística para un área de 25x25 pixeles se ha determinado la media (al igual que se hizo para determinar el ruido de lectura en el BIAS) en 4 zonas donde no había estrellas (o había pocas y muy débiles). Las mediciones han estado en el intervalo 1627-1539 ADUs (hay una zona clara de gradiente, evidente después de reducir con flats, que da lugar al intervalo). A la vista de los datos arbitrariamente se ha tomado como ADUfondo 1550 cuentas.
La ganancia de la cámara utilizada (STL11000M) es de 0,84 e-/ADU. Este es un dato que suministra el fabricante, en el caso de SBIG se registra en el firmware y se puede leer en el parámetro EGAIN de la cabecera FITS, aunque también es fácil de medir por uno mismo.
Con estos datos se calcula el flujo fotónico del cielo de fondo (Esky) a partir de la fórmula [17] y resulta 4,06 e-/s ó 243 e-/minuto. Nótese que esta forma de calcular el Esky ya tiene en consideración factores como la eficiencia óptica, el QE de la cámara, etc. por lo que la medición es adecuada para versión simplificada de la fórmula SNR [11].
A partir del Esky y el ruido de lectura de la cámara (Ron = 10 e- RMS) se puede calcular el tmax usando la fórmula [16]. De donde se calcula que el tmax es de 4,016 minutos. En este caso las exposiciones usadas en la adquisición de la luminancia son de 5 minutos, bien por encima de la tmax, por lo que son sky-limited es decir que la contribución del ruido de lectura por cada subexposición es inferior al 5% del ruido total.
Es importante recordar que el Esky incluye también la contaminación lumínica que se añade al ruido de fondo de cielo. Cuanto mas bajo sea el Esky como ocurre en cielos oscuros mayor será el tmax lo que permite aumentar aún más la SNR al poder estar más tiempo capturando señal. Esto explica porqué es necesario reducir el Esky (fotografiando desde lugares oscuros o filtrando en donde la contaminación lumínica sea un problema) para poder ganar "profundidad" a base de mayor tiempo por toma individual.
Recomendación Práctica.-
Todos estos cálculos, y algunos más, se pueden hacer también, de forma muy cómoda, con la calculadora de tomas de John C. Smith en la siguiente dirección http://www.ccdware.com/resources/subexposure.cfm .
3.2- Cámaras DSLR
En las DSLR hay un parámetro ajustable, la sensibilidad ISO, que parece afectar a la ganancia y al ruido de lectura. En estas cámaras lo mejor que se puede hacer para reducir este tipo de ruido es evitar sensibilidades ISO altas (p.e ISO1600, 3200) y, como regla general, no pasar de ISO800. En la actualidad hay astrofotógrafos que están obteniendo imágenes de cielo profundo de gran calidad con este tipo de cámaras y que usan sensibilidades ISO que van de 200 a 400.
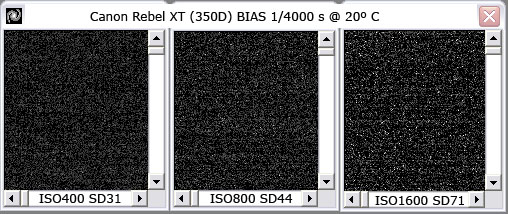
Ruido de lectura y sensibilidad ISO en una Cámara DSLR Canon 350D. El ajuste dela sensibilidad ISO afecta de forma notable al ruido de lectura (Ron). El Ron medido como la desviación estándar (SD) de los ADUs del BIAS aumenta de forma notable y no lineal con el ajuste ISO. A ISO400 es de 31 ADUs mientras que a ISO1600 es de 71 ADUs. ¡Pasar de ISO400 a ISO1600 reduce el intervalo dinámico de la cámara en más de la mitad!
Recomendación Práctica.-
Las tácticas basadas en aumentar el tiempo de exposición para enterrar el ruido de lectura pueden no ser adecuadas en las DSLR dado que, al no tener control de la temperatura, la corriente oscura aumenta de forma notable en las exposiciones prolongadas. En estos casos es recomendable limitar la duración de las subexposiciones, especialmente cuando la temperatura ambiente es alta, e incrementar de forma notable el número de las mismas. De esta forma se reduce el ruido por combinación. De la misma forma en las DSLR se ha de ser más exigente con los darks (mayor número) para limitar más el ruido que añaden durante la reducción de los datos.
4.- Dithering
El dithering (del inglés dither, agitar) es una técnica avanzada de autoguiado que consiste en desplazar ligeramente el telescopio (unos pocos píxeles) después de cada toma, de forma que la señal se capta en diferentes áreas del sensor. Esta es una forma muy eficiente de aumentar la relación señal-ruido si posteriormente las imágenes así obtenidas se combinan con algoritmos de exclusión (p.e. Sigma Average). De hecho es el método más eficiente que hay para reducir el ruido no aleatorio producido por píxeles fríos y calientes y por la diferencias de eficiencia cuántica y/o sensibilidad entre los diferente fotositos del sensor.
Recomendación Práctica.-
Recurrir a esta técnica inmediatamente después de que se tenga un buen control del autoguiado convencional.
Mejora de la Relación Señal-Ruido Después de la Adquisición de los Datos
1.- Reducción de los datos
Las imágenes procedentes de los fotodetectores CCD o CMOS contienen no sólo los datos que provienen del objeto astronómico fotografiado sino otro elementos que afectan a la imagen como son la corriente oscura de la cámara, el ruido de lectura, defectos del sensor que dan lugar a píxeles fríos y calientes o variaciones de la eficiencia cuántica, defectos producidos por la iluminación irregular del fotodetector, etc. El conjunto de todos esto elementos adicionales es lo que se conoce como la “firma del instrumento” y representa el efecto que la cámara y el sistema óptico tienen sobre la imagen. Para poder utilizar las imágenes con fines científicos y/o estéticos es necesario borrar la firma suprimiendo los datos adicionales que no provienen del objeto. Este proceso se llama reducción de datos. Con frecuencia se utiliza también el termino calibración para referirse al mismo proceso aunque la reducción de las tomas de luz no es exactamente una calibración, dado que no se hace con con un estándar de referencia.
Nota: en este artículo se utiliza el termino reducción para referirse al proceso y “tomas de calibración” para referirse a las tomas que se utilizan para la reducción de los datos brutos obtenidos en las tomas de luz.
Para reducir los datos se utilizan lo que se conocen como tomas de calibración. Las tomas de calibración que con más frecuencia se utilizan son los darks, bias y flats.
1.1.- Darks
Los darks son exposiciones oscuras (sin iluminar el fotodetector) de duración igual o superior las tomas de luz (light frames) y se utilizan para restar la corriente oscura y el ruido de lectura.
Recomendación Práctica.-
Duración de la toma de dark igual a tiempo de exposición de cada una de las tomas de luz (subexposiciones).
Temperatura igual a la que se utilice para las tomas de luz
Dark maestro = n darks combinados con Sigma Average (n, mínimo 9 a 11, muy deseable 24 a 30, ideal más de 30)
Importante: Hay que hacer darks maestros por cada temperatura y tiempo de exposición que se vaya a utilizar
Por ejemplo, si se hacen subexposiciones de 5 minutos (p.e. LRGB) y 15 minutos (p.e. H alfa) y las temperatura que se usan son -15ºC (verano) y -25ºC (invierno) habrá que hacer cuatro darks maestros: de 5 minutos a -15ºC, de 15 minutos a -15ºC, de 5 minutos a -25ºC y de 15 minutos a -25ºC,
En las DSLR al no poder controlar la temperatura es conveniente combinar un número muy grande de tomas y/o hacer los darks inmediatamente antes y después de la adquisición de los datos.
1.2.- Bias
Los bias son también exposiciones oscuras pero de muy corta duración, hechas con el menor tiempo exposición que la cámara permita. Los bias sirven para calibrar flats, cuando estos son de corta duración, y para restar el ruido de lectura en algunas modalidades de reducción de datos en las que los darks son de mayor tiempo de exposición que las tomas de luz, es lo que se conoce como reducción con autoescalado. Cuando se utilizan darks de la misma duración que las subexposiciones de luz no es necesario usar calibrar con bias porque los darks también incluyen el ruido de lectura, luego llevan el bias ya incluido.
Recomendación Práctica.-
La duración de la toma debe ser la mínima que la cámara permita (p.e. 1/4000 s en una DSLR), en programas para cámaras CCD suele haber un ajuste prefijado para hacer los bias. Las tomas se hacen evitando que la luz llegue al sensor y preferiblemente (no es imprescindible) a la temperatura que se vaya a usar para las tomas de luz.
Bias maestro = 60 bias combinados con Sigma Average
1.3.- Flats
Los flats son tomas de luz hechas con una fuente de luz uniforme. Los flats sirven para calibrar las tomas de luz y reducir el efecto que produce la iluminación no-uniforme de la óptica (p.e. el viñeteo), las variaciones en la sensibilidad o eficiencia cuántica en diferentes áreas del sensor o los defectos de iluminación producidos por el polvo y otros elementos extraños en la trayectoria óptica. En el caso de los flats la calibración se hace dividiendo los datos de la toma de luz por los del flat. Es importante “normalizar” los flats antes de la división. La normalización consiste en dividir los datos del flat por el valor máximo obtenido en el propio flat de modo que el intervalo de valores del flat normalizado va de 1,00 (máximo) a 0,00 (mínimo). El objeto de la normalización es preservar la magnitud de los datos de la toma de luz, de forma que sigan siendo útiles para mediciones fotométricas. La mayoría de los programas hacen esto de forma automática cuando se utilizan las opciones de reducción/calibración con flats.
Para adquirir buenos flats hace falta: que la fuente de iluminación sea uniforme, que la exposición esté dentro de la zona de respuesta lineal del sensor y que el sistema esté enfocado.
Fuente de luz uniforme. La mejor fuente de luz uniforme son determinadas áreas del propio cielo durante el ocaso/crepúsculo. Pero la toma de flats en estas condiciones es difícil: el tiempo disponible es limitado, la intensidad de luz está cambiando constantemente y por tanto el tiempo de exposición, etc. Una alternativa subóptima pero práctica y cómoda es una caja de luz.
Linealidad del sensor. Dado que la calibración con flats se hace dividiendo los datos es muy importante que los datos normalizados sean lineales. Los sensores CCD no tienen una respuesta lineal en todo su intervalo, especialmente cuando la señal es más de la mitad de la capacidad de pozo completo (full well capacitiy), por lo que se recomienda no pasar de la mitad del intervalo dinámico del sensor de forma que se asegure la linealidad de los datos y una buen relación señal-ruido en los flats. Un buen compromiso es que los valores máximos del flat estén entre 1/3 y 1/2 del intervalo: unos 20.000 a 30.000 ADU en cámaras con ADC de 16 bits o 1.500 a 2.000 ADU en cámaras de 12 bits.
Enfoque. Para reducir bien los donuts que produce el polvo depositado en los filtro o la superficie del sensor es necesario que el sistema esté enfocado. También habrá que repetir los flats para cada filtro que se utilice, cada filtro tiene su patrón de suciedad y también puede haber pequeñas diferencias en el viñeteo que producen. Como es difícil que el sensor de la cámara quede perfectamente centrado en el eje óptico del sistema habrá que hacer otros flats si se cambia el ángulo de la cámara. Evidentemente, se puede ser más o menos estricto con esta forma de proceder dependiendo del nivel de calidad que se esté dispuesto a aceptar.
Recomendación Práctica.-
La duración de la toma es el tiempo de exposición necesario para alcanzar valores máximos de 20.000-30.000 ADU (16 bits) o 1.500-2.000 ADU (12 bits)
La temperatura, en el caso de cámaras refrigeradas, ha de ser la que se utilice para las tomas de luz (p.e. -20ºC).
Flat maestro = 11 flats (previamente calibrados con un buen Bias maestro) combinados con Sigma Average
Es muy conveniente hacer un Flat maestro por cada filtro y posición de la cámara con el sistema óptico enfocado.
Cuanto menor es la relación focal del sistema óptico más críticos son los flats
Reducción de los flats
Con cámaras CCD refrigeradas a temperatura de servicio no es necesario reducir los flats con sus propios darks si la exposiciones no exceden de 30 segundos. Como la señal en el flat es muy alta la SNR también lo es, por eso no hacen falta tantas tomas como en otras tomas de calibración o en las tomas de luz. Aquí lo más importante es eliminar el ruido de lectura para lo que hace calibrar con un buen bias maestro que se hace combinando con sigma average 60 tomas bias. Nueve flats (previamente calibrados con el bias maestro) combinados con Sigma Average tienen un buen nivel de SNR y una baja contribución de ruido.1.4 Ruido de calibración
Durante la reducción de los datos se produce un fenómeno paradójico: aunque la reducción es una forma muy eficiente de tratar el ruido también puede ser una fuente de ruido en si misma. Esto ocurre porque las tomas de calibración también contienen ruido por lo que se puede llamar ruido de calibración.
Para reducir el ruido de las tomas de calibración lo que se hace es combinar múltiples tomas en una sola. Por ejemplo se combinan varios darks para formar un dark maestro que será el que se aplique durante la reducción de los datos. Los mismo se hace con los bias. En el caso de los flats, al ser tomas de luz, también deben reducirse. Si los flats son de corta duración, y provienen de un cámara refrigerada a temperatura de servicio, puede ser suficiente con una reducción con bias para restar el ruido de lectura. Si las exposiciones de los flats son más largas será necesario reducirlos con sus propios darks.
El control del ruido en las tomas de calibración es más importante de lo que pudiera parecer a priori. Como las imágenes se combinan después de haber sido reducidas y habitualmente se utiliza el mismo dark maestro para reducir todas las imágenes, lo que ocurre es que si este tiene ruido, el mismo patrón de ruido se introduce en todas las imágenes. Esto hace que el ruido introducido por el dark maestro se comporte como señal al correlacionar en todas las imágenes reducidas. Por esta razón es muy importante que el dark maestro tenga el menor ruido posible, lo que se consigue combinando un número grande de darks individuales para generar el maestro. Lo mismo ocurre si el flat maestro es también ruidoso.
2.- Combinación de imágenes individuales
La combinación de varias imágenes individuales (tomas de luz) después de ser reducidas es un método que permite un importante supresión adicional de ruido en imágenes astronómicas. Durante la combinación se calcula la media u otras estimaciones estadísticas de cada pixel y con estos nuevos datos se construye la imagen resultante. La naturaleza aleatoria del ruido y el hecho de que la señal no es un fenómeno aleatorio constituyen la base de este método. Al combinar varias imágenes el ruido tiende a cancelarse, porque cambia de una a otra (no guarda correlación), mientras que la señal permanece constante (correlaciona) en todas las imágenes y se suma.
Desde un punto de vista estadístico cada imagen se comporta como una muestra del flujo fotónico del objeto. Si las muestras son independientes la señal aumenta en la misma proporción que el número de imágenes que se combinan mientras que el ruido, por seguir la distribución de Poisson, aumenta de forma proporcional a la raíz cuadrada del número de las imágenes. Por ejemplo, al combinar dos imágenes la señal se multiplica por 2, mientras que el ruido se multiplica por la raíz cuadrada de 2, es decir por 1,4. De esta forma al combinar múltiples imágenes se incrementa la relación señal ruido. Este es, por tanto, un método muy eficaz para reducir el ruido.
2.1- Efectos del método de combinación

El ruido de fondo en una sola toma reducida es de 42,5 SDCombinación Media Aritmética (Mean/Average Combine)
Desde un punto de vista estadístico la media aritmética es la medida de tendencia central mas obvia que se puede elegir, es el simple promedio de las observaciones del conjunto de imágenes, es decir el valor obtenido sumando los valores de lo pixeles que se corresponden y dividiendo esta suma por el número de imágenes a combinar.
Este método es el que más incrementa la relación señal ruido. De hecho la mejora en la SNR es la raíz cuadrada del número de las imágenes (n= número de imágenes a combinar) Es el mejor método para reducir el ruido aleatorio (de Poisson) pero es el peor para reducir ruido no aleatorio (píxeles fríos y calientes, falta de uniformidad en el sensor, ruido de calibración y señales espurias -satélites, aviones, meteoros, etc-).


El ruido de fondo después de combinar 14 tomas con la media es de 17,6 SDCombinación Mediana (Median Combine)
La mediana es el valor situado en el medio en un conjunto de observaciones ordenadas por magnitud. En la combinación mediana la imagen resultante es la mediana de los píxeles que se corresponden en el conjunto de la imágenes, de esta forma se elimina los valores extremos. Es un método adecuado para eliminar artefactos, como los rayos cósmicos, pero su rendimiento en ruido aleatorio, en términos de incremento de la relación señal-ruido (SNR), es inferior a los otros métodos.


El ruido de fondo después de combinar 14 tomas con la mediana es de 23,7 SDCombinación Media con exclusión Sigma (Sigma Clipped Average Combine o Kappa-Sigma Combined)
En la combinación mediana con exclusión sigma, primero se excluyen los valores extremos (outliers) y luego se calcula la media de los valores restantes. Desde un punto de vista estadístico es muy poco probable que los valores extremos sean representativos de la población analizada, por lo que es un aproximación muy lógica. Este método combina lo mejor de los dos anteriores. Por un lado es muy eficaz con el ruido aleatorio, comparable a la media pura, aunque requiere más imágenes -el factor incremento de la SNR es raíz cuadrada de n-2 (n es el número de imágenes) versus n en el caso de la media- y por otro es muy eficiente con el ruido no aleatorio.


El ruido de fondo después de combinar 14 tomas con la media es de 18,6 SDEl único problema que plantea es que no hay un estándar para definir los criterios de exclusión, por lo que las diferentes implementaciones del algoritmo dan lugar a resultados dispares (unas son claramente mejores que otras). Algunos programas permiten ajustar la exclusión en función de la desviación estándar (p.e. Consola de Croman para Maxim DL), en otras no esta claro que ha hecho el programador y parece que sólo se rechazan los valores extremos, sin tener en cuenta el número de desviaciones estándar. En mi experiencia, algunas implementaciones son muy pobres y no se deberían usar. Otras, como las de Croman y Gralak (http://www.gralak.com/Sigma/index.html) son excelentes. Para una comparación de resultados véase (http://astrosurf.com/afernandez/equipment/ccd/comb_method.htm)
Recomendación Práctica.-
A partir de 11 imágenes la diferencia en la SNR entre la Media y la Exclusión Sigma se hace menor de un 10%, luego la mejor opción es hacer más de 11 imágenes y usar una buena implementación del Sigma Clipped Average. Si este método se combina con dithering los resultados son sobresalientes.
3.- Ruido aritmético
Otro tipo de ruido que se puede introducir durante la reducción de los datos es que se produce por redondeo cuando se trabaja con números enteros. Este error que al principio puede ser pequeño se va acumulando en las múltiples operaciones que se hacen durante todo el proceso de reducción y combinación de las imágenes.
Recomendación Práctica.-
Hacer la reducción y combinación usando archivos en formato FITS sin compresión, de 32 bits y coma flotante
Referencias
1.- Berry R, Burnell, J. Handbook of Astronomical Image Processing. Willmann-Bell Inc. Richmond, 2000
2.- Buil Ch, Canon EOS 20D vs Canon EOS 10D
http://www.astrosurf.org/buil/20d/20dvs10d.htm3.- Massey P, Jacoby G. CCD Data: The good, the bad and the ugly. ASP conference series, vol 23, 1992
4.- Newberry, MV. Signal-to-noise considerations for sky-substracted CCD data, PASP, 103:122-130, January 1991
5.- O'Grady, A. The merits of various types of CCDs for spectroscopic applications, Photonics Spectra, November 2005
6.- Schirmer, M. Principles of Data Reduction
http://www.astro.uni-bonn.de/~mischa/mbo/datareduction/index.html7.- Smith JC, Sub-Exposure Times and Signal-to-Noise Considerations
http://www.hiddenloft.com/notes/acq.htm8.- Smith JC, Subexposure Calculator
http://www.ccdware.com/resources/subexposure.cfm9.- Wood S, Extreme Imaging, going deep
http://home.earthlink.net/~stanleymm/eXtreme.htm© Copyright 2006 by Antonio Fernández. All rights reserved. Contents of these pages, including photos and text, may not be reproduced, published, copied or transmitted in any form without written permission of the author.
-