dans le monde des focusers , le TCF leo s'est fait une place parmi les astrographes.
certes il n'est pas donné mais c'est ce qui se fait de mieux à ce jour .
il y a bien le ESATTO mais a ce jour il n'y a pas encore beaucoup de retour sur celui ci pour faire la comparaison et lui faire de l'ombre.
le TCF leo est fabriqué par la société Optec https://www.optecinc.com/astronomy/catalog/tcf/19740.htm
sa forme est atypique et il permet d'y loger des correcteurs de coma de 3 pouces
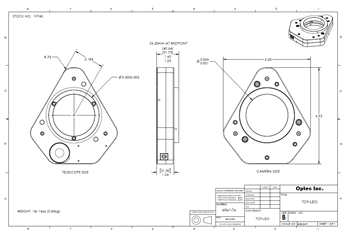
Spécifications du TCF-Leo :
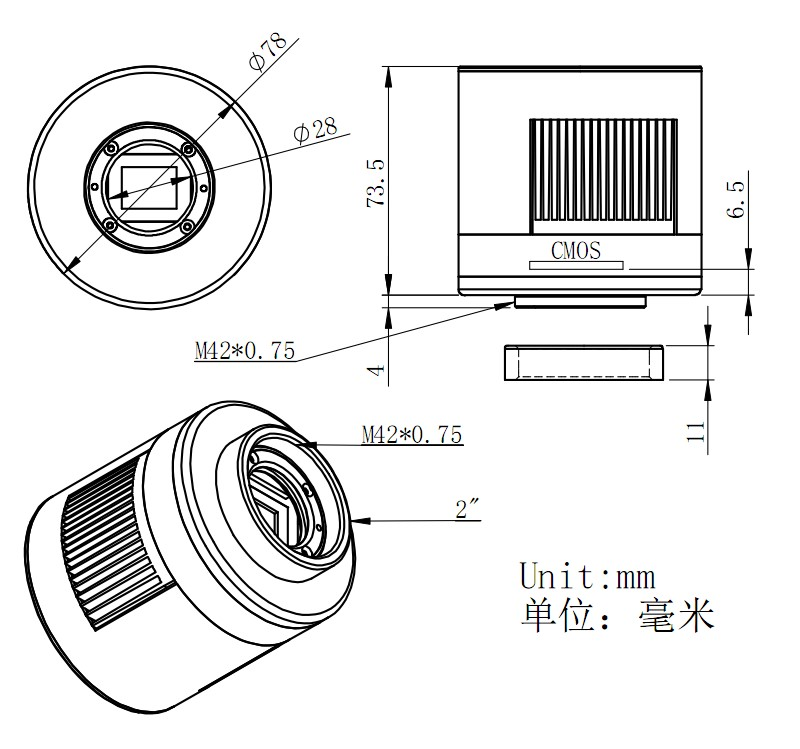
Épaisseur totale: 31,8 mm à 40,6 mm
Déplacement de la mise au point: 8,9 mm
Point médian de la mise au point: 36,2 mm
Voyage total en étapes: 112 000 étapes
Résolution de l'étape: 0,08 microns
Poids: 0,85 kg
Capacité de charge utile: 9 kg
Montage côté télescope: queue d'aronde OPTEC-3600
Montage côté caméra: OPTEC-3000, tube de traction de 3 pouces
Système de contrôle: contrôleur FocusLynx (inclus)

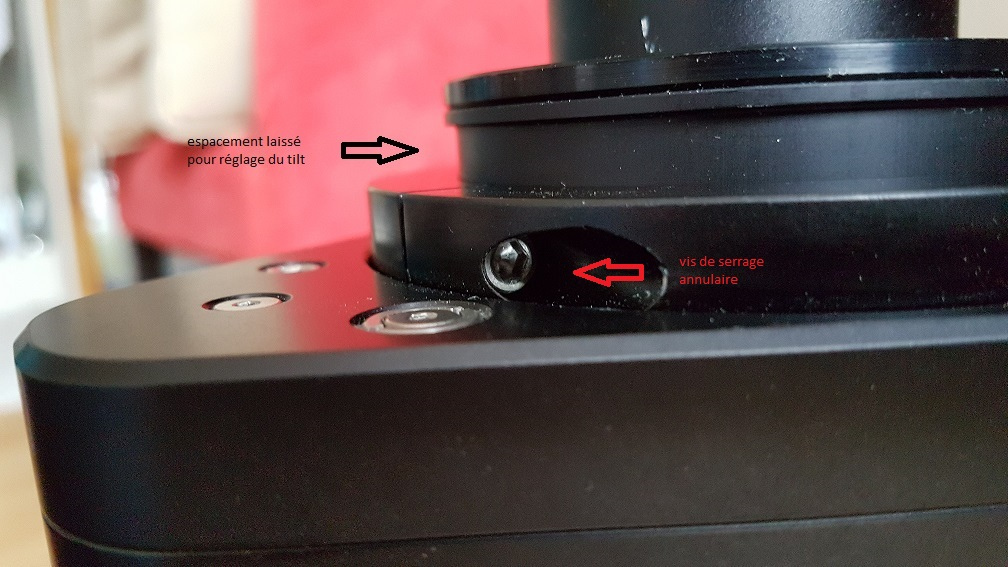
j'ai choisi le modèle Split-Clamp sur recommandation de "florent poiget"
en faite c'est un serrage annulaire et non avec 3 vis comme on peut le voir sur les autres focusers : très pratique pour serrer le correcteur de coma
il est fournit avec deux clés dont l'une est utilisée pour ce serrage (clé jaune) et l'autre plus spécifique pour fixer le focuser à la base par trois vis (clé rouge)

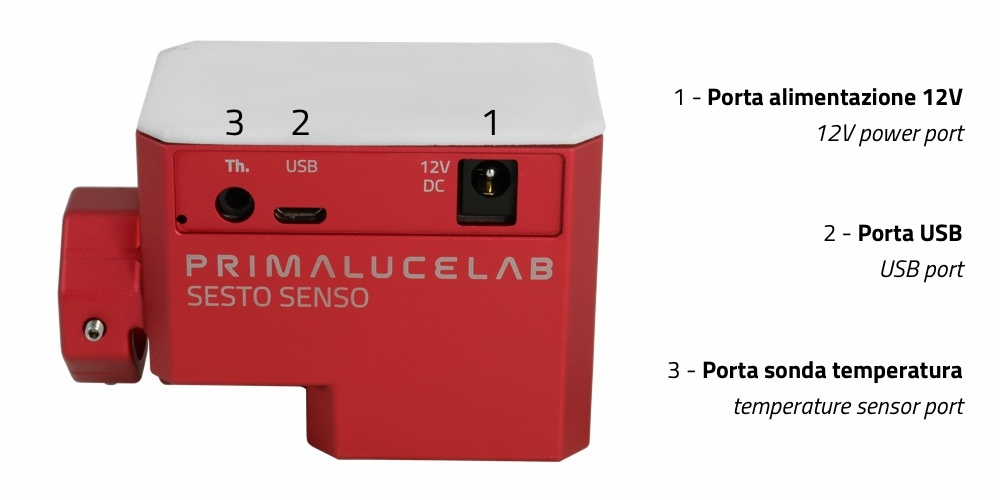
il est fournit avec un boitier de contrôle Focuslynx qui permet de gérer l'ensemble des éléments : sonde thermique , raquette , 2 focusers , liaison avec PC
les points négatifs ou pouvant être gênants :
- le premier défaut étant que ce module de gestion n'a pas été intégré au focuser et il faut bien l'installer quelque part.
moi je l'ai pour le moment installé sur ma demi colonne mais j'envisage de le pose en fixe au dessus de mon newton.
- le deuxième point noir c'est que le fonction Wifi est en option là ou il est intégré sur le ESATTO.
pour le moment je le gère avec le câble USB et cela me suffit largement.donc pas vraiment une contrainte
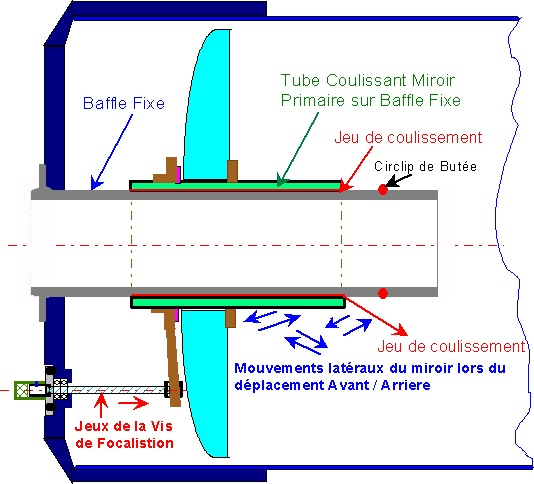
- la course est très faible de 8,9mm par pas de 0,08 microns là ou le sestosenso et ESATTO font mieux
il faut donc bien calculer sa position pour être au bon backfocus.
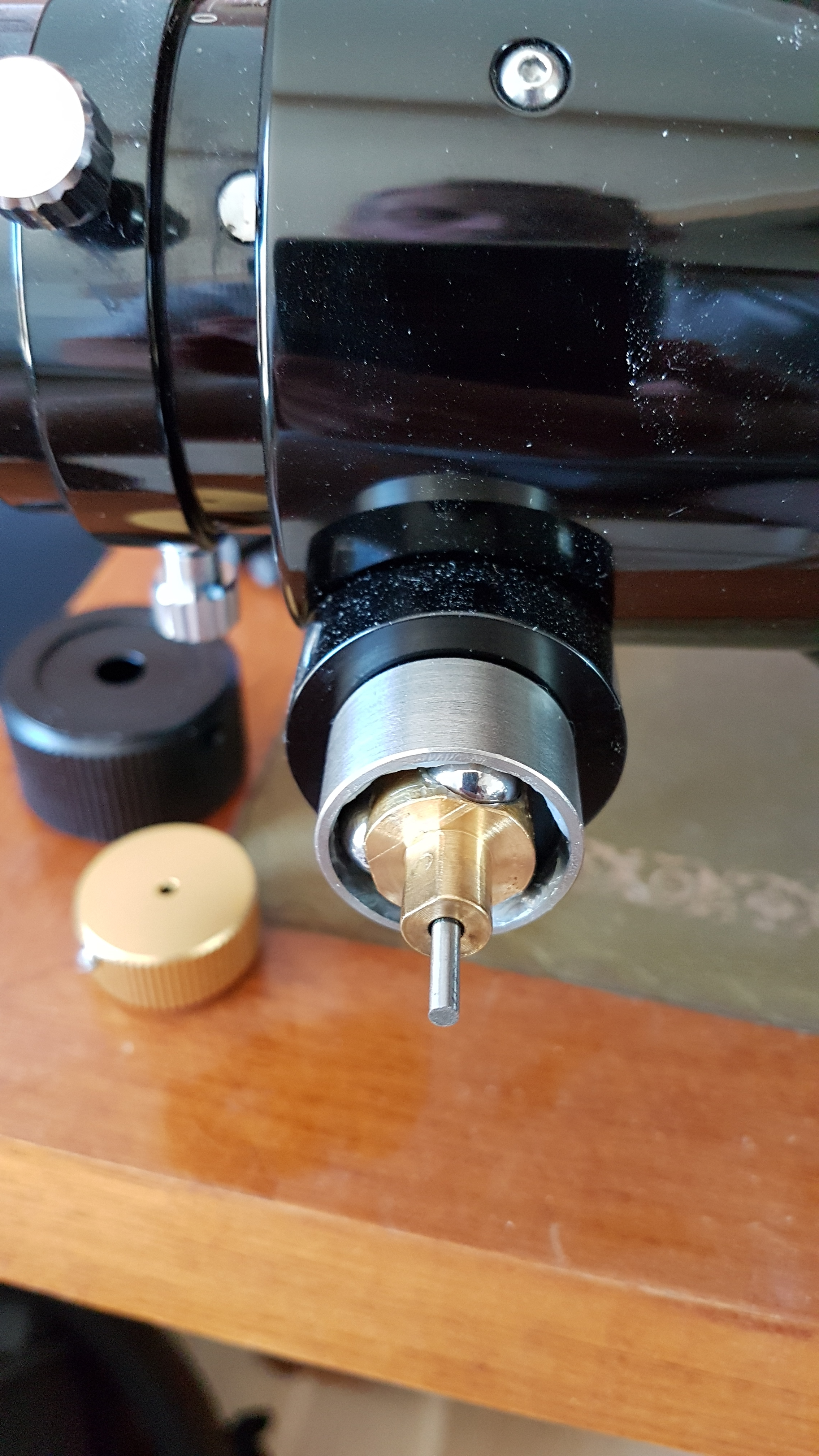
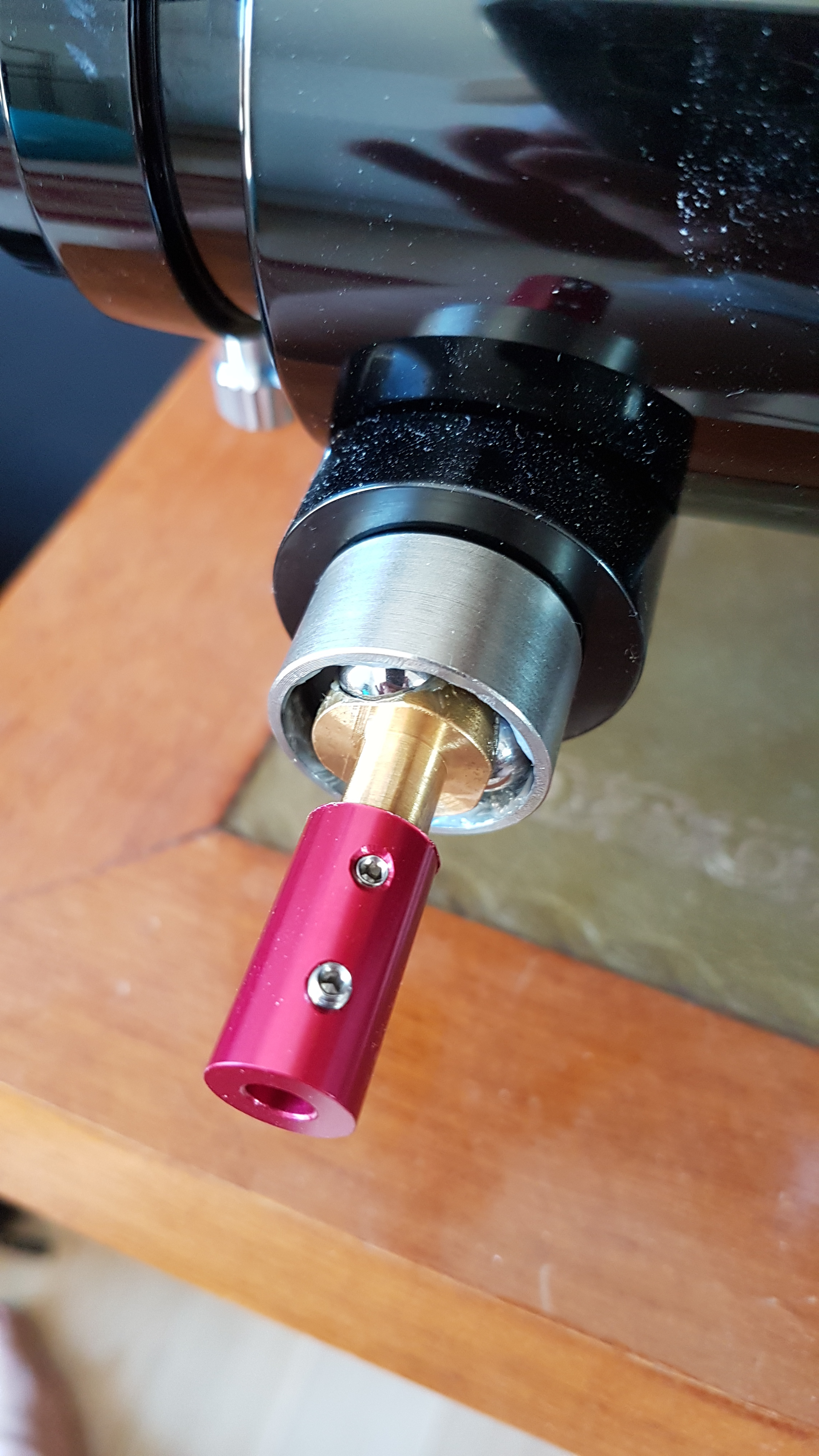
la bague adaptative a été réalisée par la société skyméca : solide , finition impeccable pour un prix contenu
- la quatrième point noir c'est sa sonde qui faut bien positionner quelque part (idem aux autres focusers) et sa connectique est spécifique et pas des plus pratiques. je les bloqué sur la fixation d'un des anneaux
- le dernier points noir c’est pour régler le Tilt de la caméra .
étant large il est difficile de passer une clé allen pour régler le tilt si le backfocus est faible entre le correcteur de coma et la caméra ( dans mon cas de 57mm). j'ai donc préféré raccourcir la bague pour laisser plus de mou sur la fixation du correcteur.
Spécifications fonctionnelles:
Commande de moteur pas à pas: moteurs pas à pas bipolaires et unipolaires,
Résolution: contrôleur 16 bits avec une plage de 65 535 pas par focaliseur,
Connectivité PC: USB / série, Ethernet ou WiFi 802.11 en option,
Commande manuelle: 2 boutons en option avec lecture numérique,
Connexion WiFi: compatible 802.11b / g en option,
Deuxième pas: carte fille enfichable en option,
Puissance d'entrée: alimentation universelle 12VDC (entrée 110 à 230VAC)
Connexions du port FocusLynx:
Focuser 1: prise RJ45 pour Cat-5e / Cat-6 standard vers focuser,
Focuser 2: deuxième carte pas à pas en option pour prise RJ45,
Alimentation: entrée 12VDC, fiche 2,5 x 5,5 mm, broche centrale positive,
Réseau: prise Ethernet RJ45 standard,
Contrôleur manuel: prise RJ22 pour cordon téléphonique standard,
Série: prise RJ12 pour câble USB / série Optec (inclus).
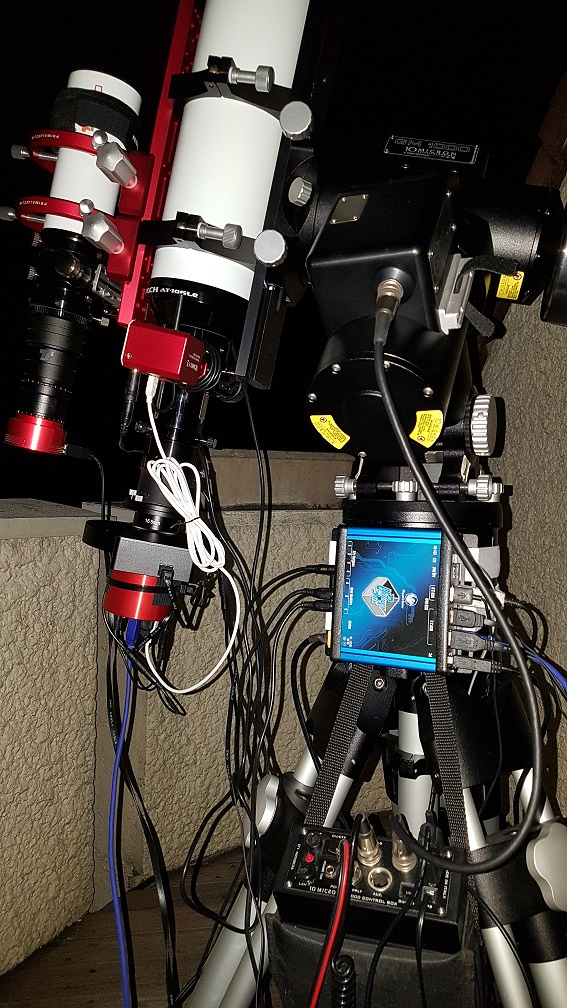
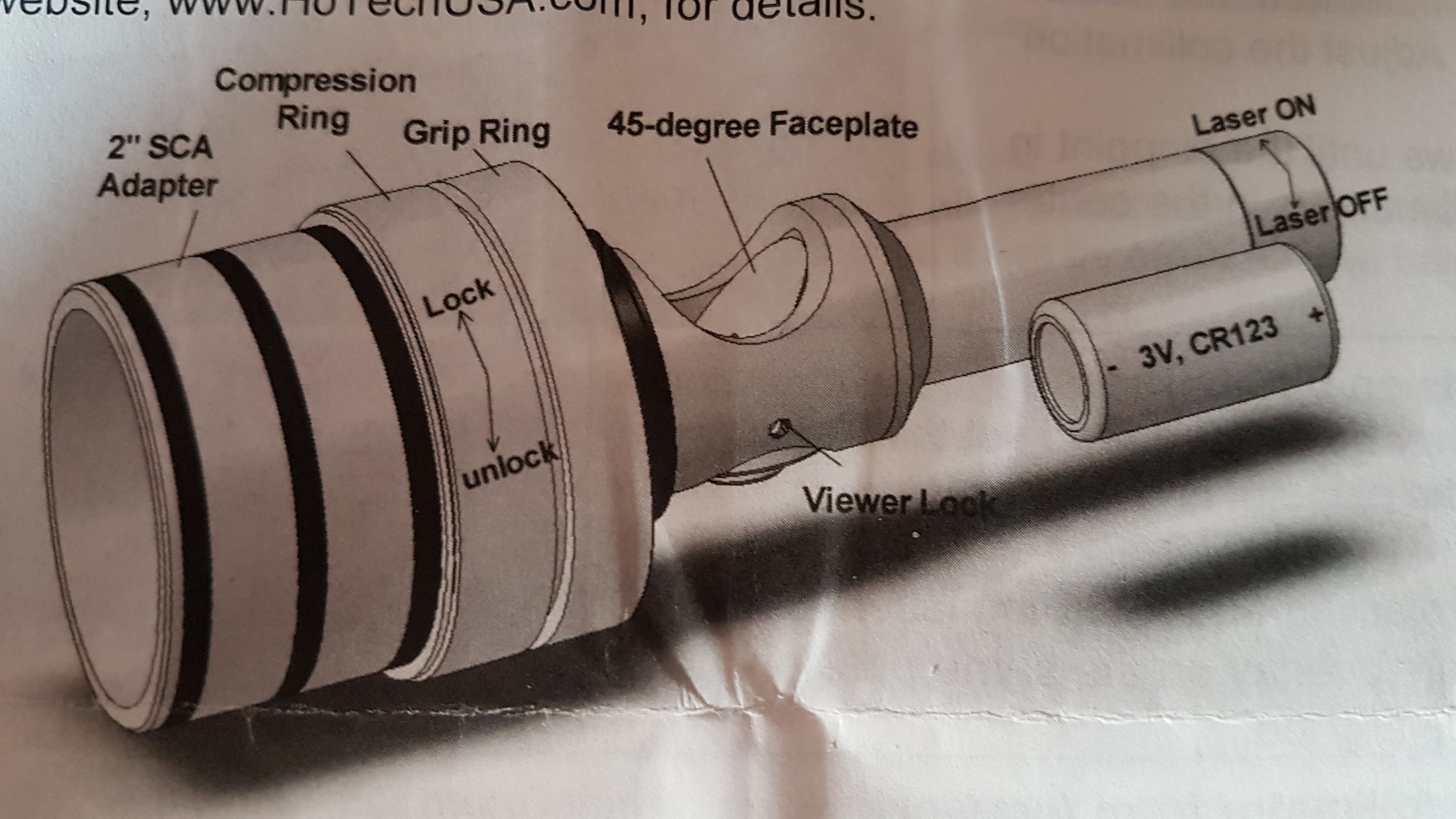
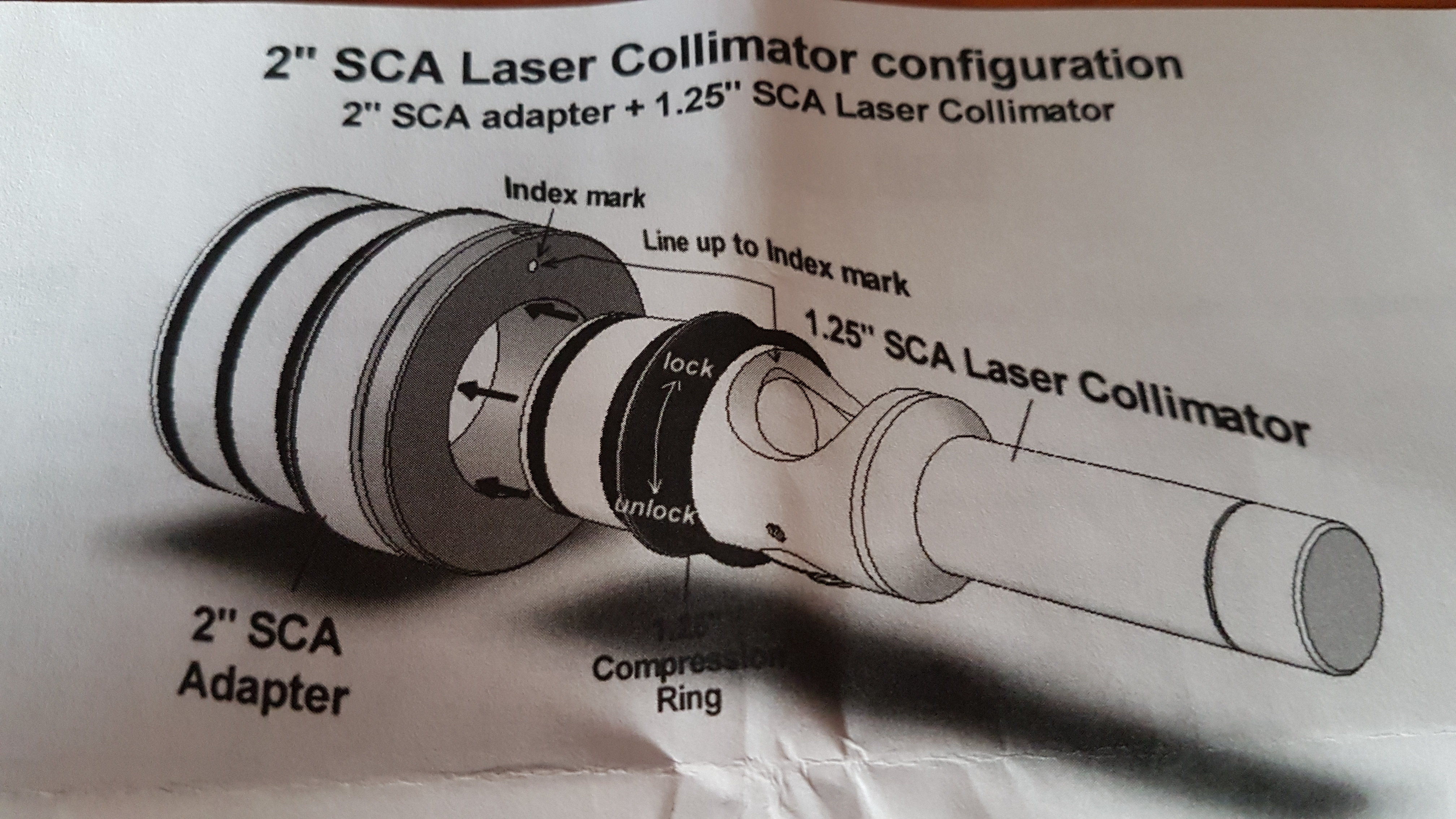
voulant faire aussi de l'observation bien que ce ne soit pas vraiment approprié pour ce tube , j'ai acheté la bague adaptative en sortie 2 pouces. elle est aussi utile pour y mettre le collimateur cateyes.
https://www.optecinc.com/astronomy/catalog/adapters/optec-3000/17804.htm

passons à ces avantages :
- il est compact et ne prend pas de place en épaisseur
- le poids est contenu
- la finition du focuser est indéniable
- il supporte un poids de 9kg
- le serrage annulaire (option) est sensationnel pour ne pas dire fantastique
- et le must : au démarrage de celui ci il se rétracte au point zéro pour reprendre sa position home (celle décidé par vous lors de l'arret )
c'est ce que je reprochais au système sestosenso de primaluce : en cas de plantage ou d’arrêt brutal il faut refaire l'initialisation , et a chaque arrêt il fallait le rétracter
j'ai dernièrement décidé d'acheter la raquette de commande pour me passer du PC lorsque je fais du visuel . il existe deux raquettes
#17680 - TCF Hand Controller with IN and OUT buttons : https://optecinc.com/astronomy/catalog/tcf/17680.htm
#19695 - Hand Control with Digital Read-Out https://www.optecinc.com/astronomy/catalog/focuslynx/19695.htm
j'ai choisi la plus complète
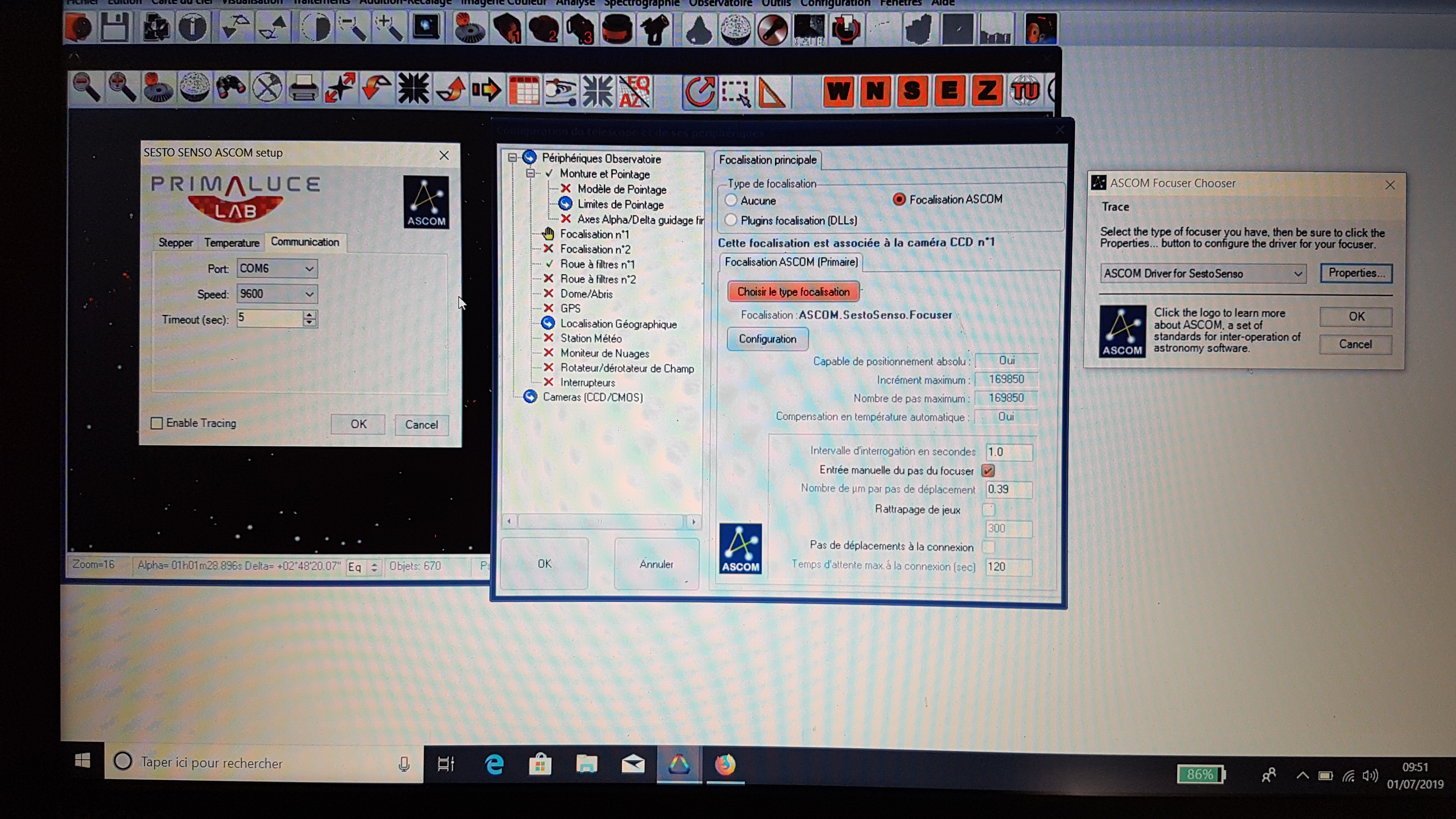
pour installer le logiciel de gestion sur le PC , il vous faudra passer par ce lien pour télécharger les drivers et le software
https://www.optecinc.com/astronomy/downloads/focuslynx.htm
ce logiciel est simple d'utilisation et comporte tous les options nécessaire pour bien le gérer.

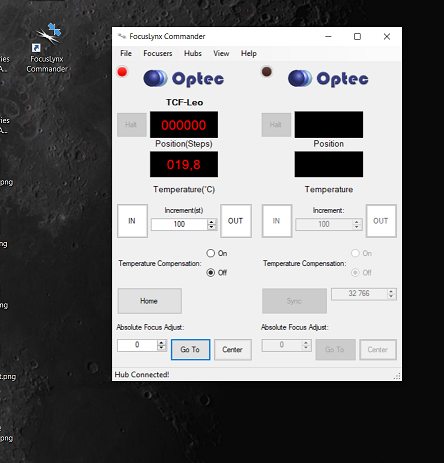
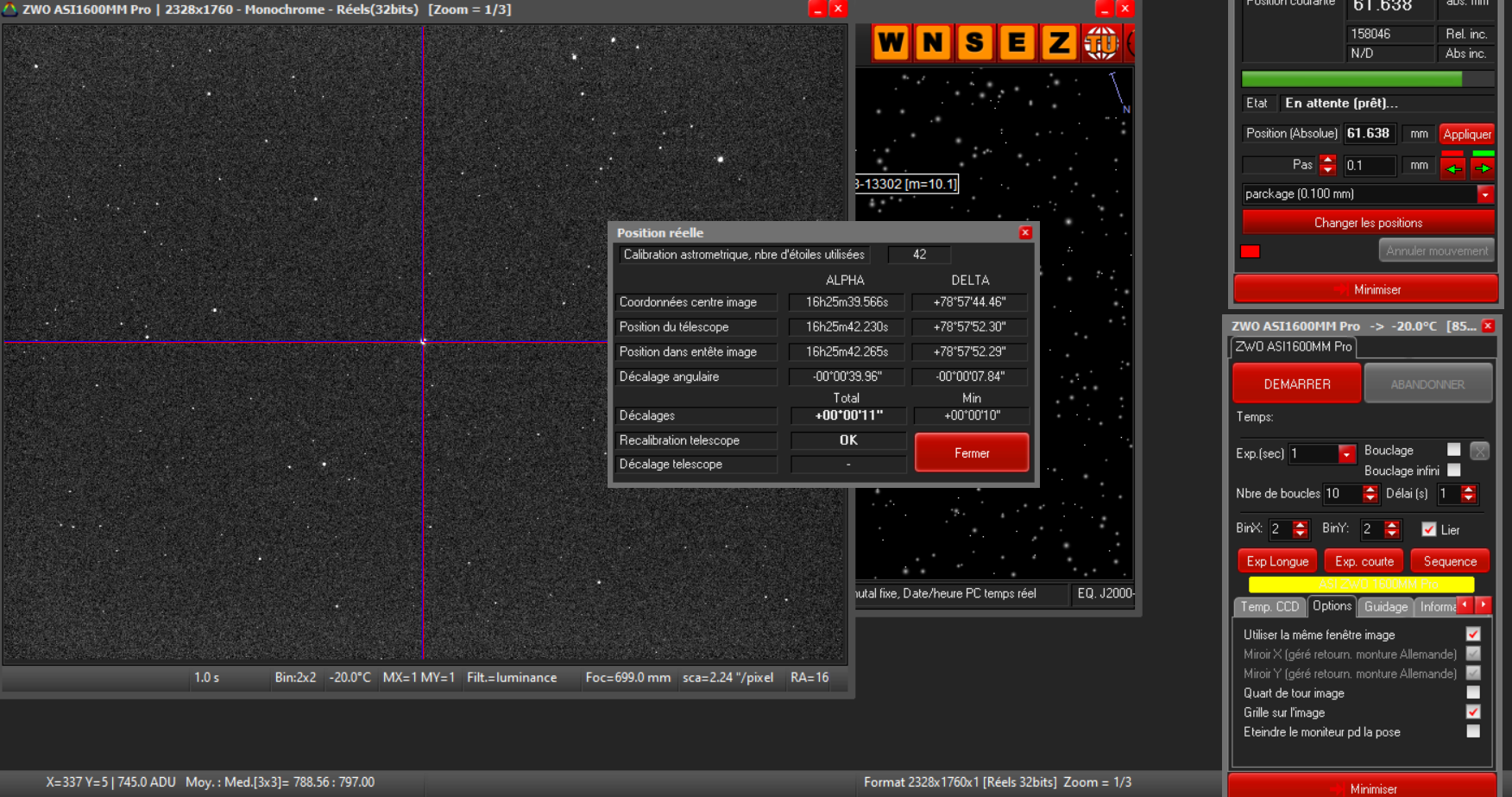
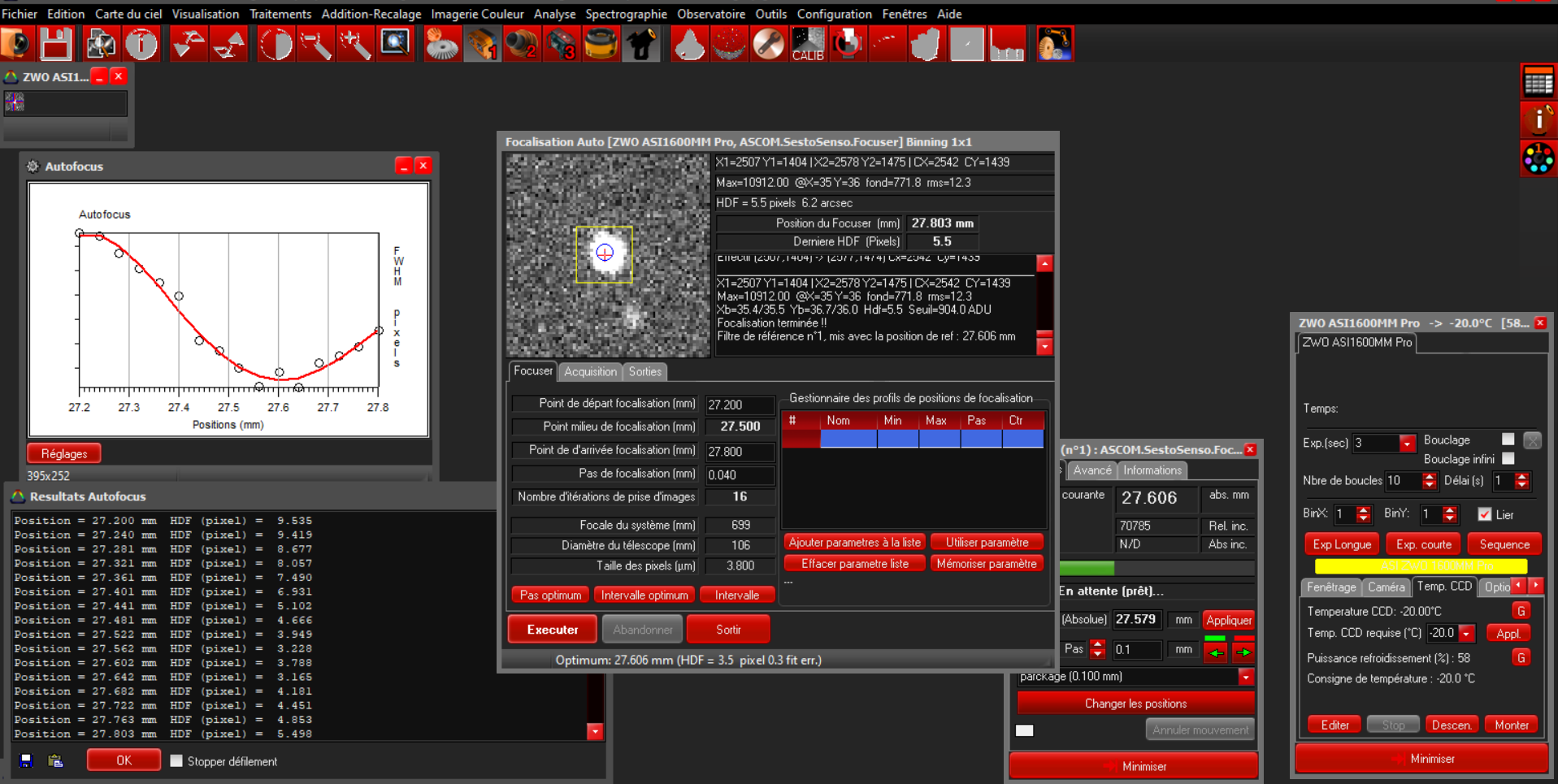
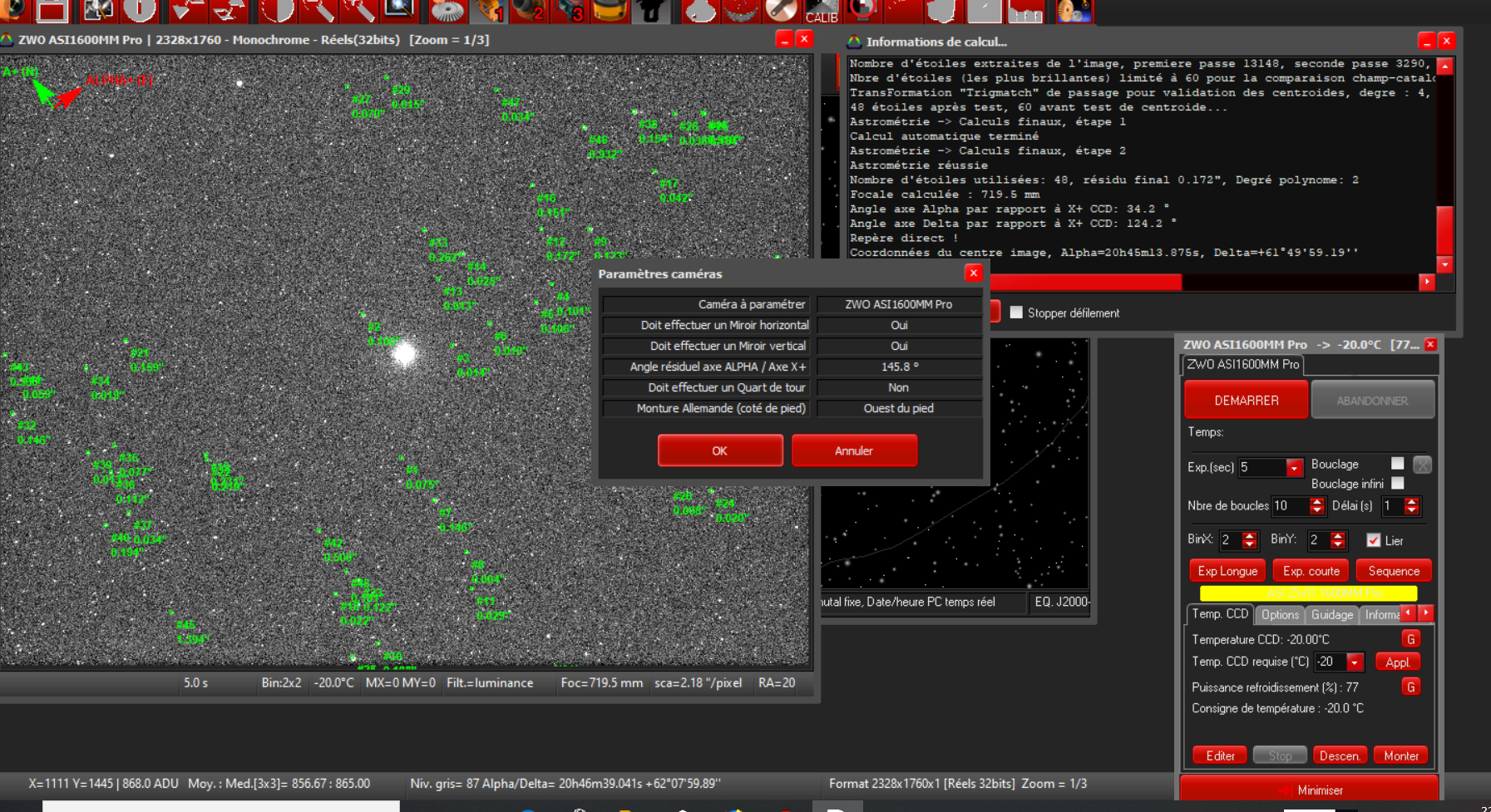
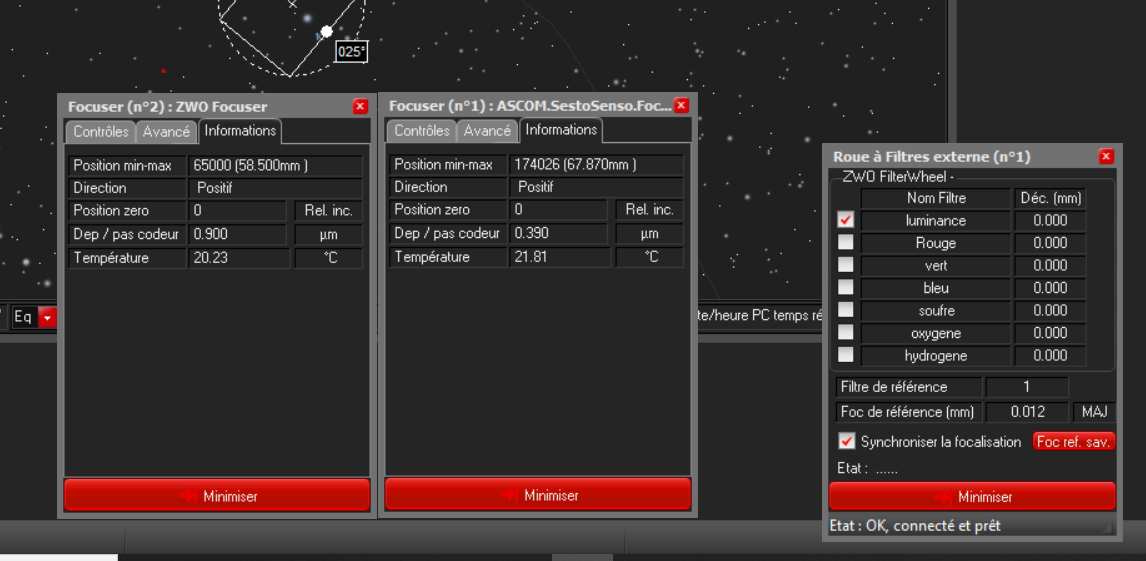
il est très bien reconnu par le logiciel Prism V10 et le déplacement se fait non pas en pas mais en mm.
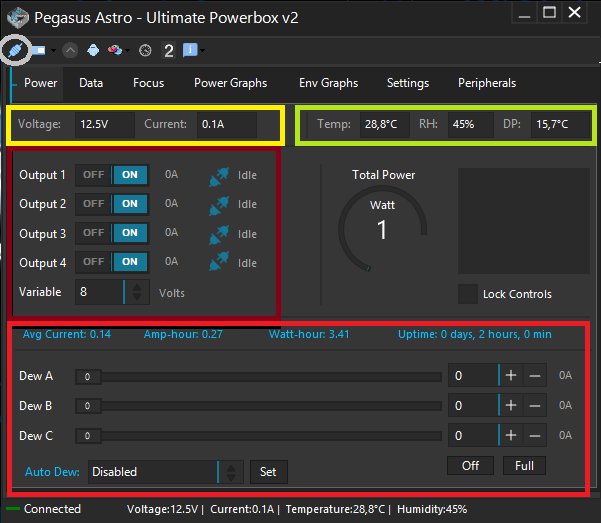
la température à l'air d'être conforme mais j'ai constaté un décalage avec le système du pégasus. c'est un point que je vérifierais plus tard
le constructeur vous permet de choisir deux options mais il faut pour cela que le firmware FocusLynx Hub soit à la version v2.2.1 :
Avec les moteurs pas à pas, la vitesse et le couple fonctionnent généralement inversement. Autrement dit, des vitesses plus élevées entraîneront généralement un couple plus faible.
1- L'option TCF-Leo Hi-Torque Focuser Type peut gérer de manière fiable des charges utiles jusqu'à 9 kg
2- Si vous préférez un mouvement plus rapide de votre porte-oculaire, sélectionnez plutôt le type d'appareil de mise au point TCF-Leo Hi-Speed. Il y aura une réduction du couple disponible, mais le porte-oculaire rentrera généralement en moins d'une minute. La charge utile maximale recommandée pour le type d'appareil haute vitesse TCF-Leo est d'environ 5 kg.
les mouvements de ce focuser sont très rapides mais aussi audibles .
conclusion : il transpire la qualité et je suis contant de son acquisition. il est fiable ; performant et répond à toutes exigences même si il m'a fallu attendre 6 mois pour l'avoir.
Test de la température :
il fallait bien trouver un défaut à ce porte oculaire . le décalage est minime mais bien présent (1°C ).
le câble de la sonde est bien embêtant : ni trop grande ni trop petite . on ne sait pas trop ou la fixer !
la compensation en T° :
cela fonctionne normalement avec prims V10 mais j'ai constaté une chose très étrange.
- une chute des températures puis une remontée de celle ci pour ensuite redescendre..... chose que je ne pourrais expliquer
le backslash :
il existe bien mais il est tellement minime qu'il est inutile de le prendre en compte .
- En savoir plus…
- 0 commentaire
- 1 700 vues






























![20200105_184643[1].jpg](http://www.astrosurf.com/uploads/monthly_2020_02/5e48bc5309b72_20200105_1846431.jpg.630a2c0747af626367d78dc58fe1414b.jpg)








![20191016_153454[1].jpg](http://www.astrosurf.com/uploads/monthly_2019_10/5dab5837b5faa_20191016_1534541.jpg.ad5e5505de8fa1d5e37cafb0426f3a15.jpg)
![20191016_160611[1].jpg](http://www.astrosurf.com/uploads/monthly_2019_10/5dab5891dc16e_20191016_1606111.jpg.95372ea93171b00bda8265d6d994f56e.jpg)
![20191019_173142[1].jpg](http://www.astrosurf.com/uploads/monthly_2019_10/5dab58cce998d_20191019_1731421.jpg.dd8c60505151248a32fa9760f80db9cc.jpg)