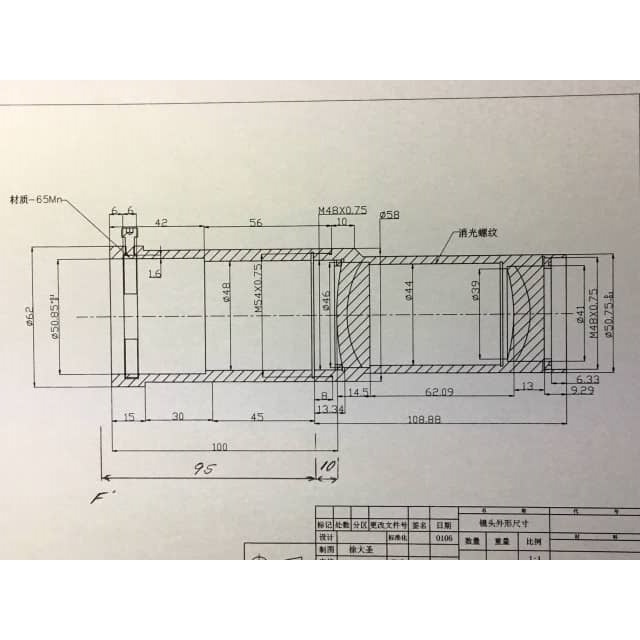
possédant une lunette TS60/330 comme chercheur , j'envisageais de l'utiliser pour l'autoguidage , l'observation et l'astrophotographie grand champ
pour effectuer cette focalisation , je décide d'acheter un moteur de mise au point avec l'option d'effectuer cette mise au point manuelle par une raquette .
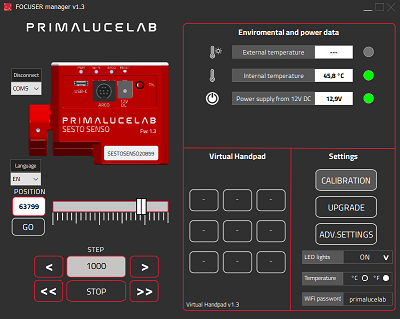
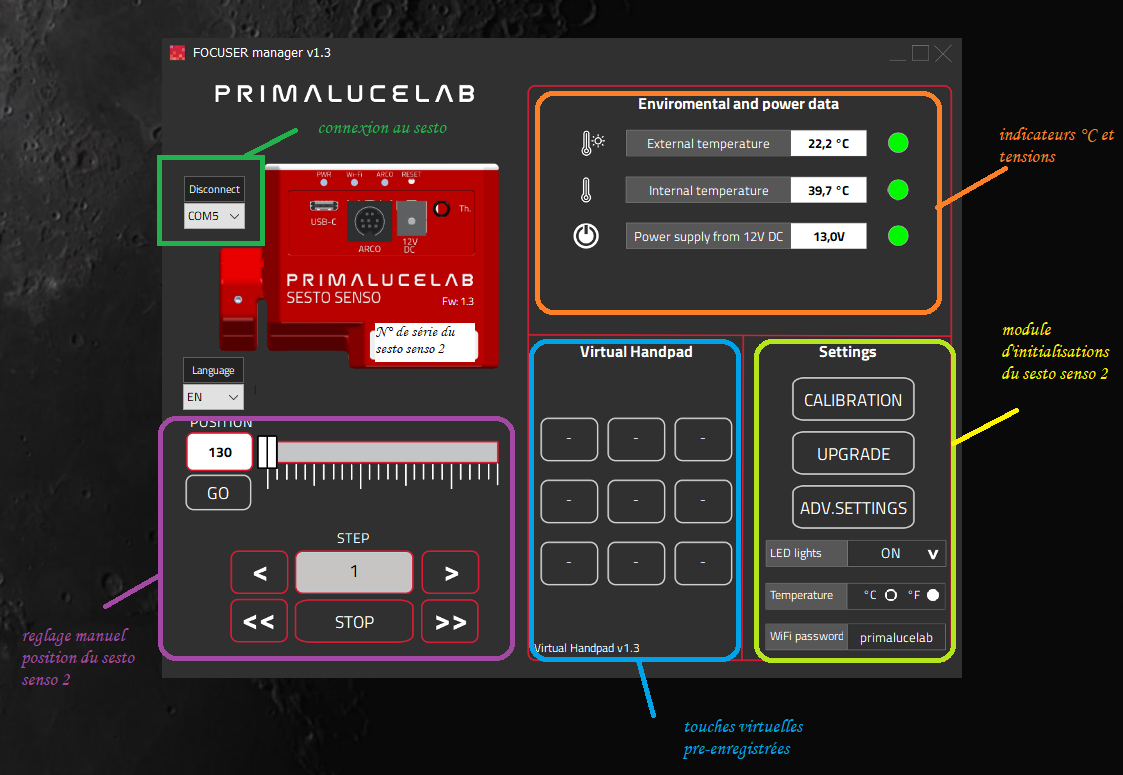
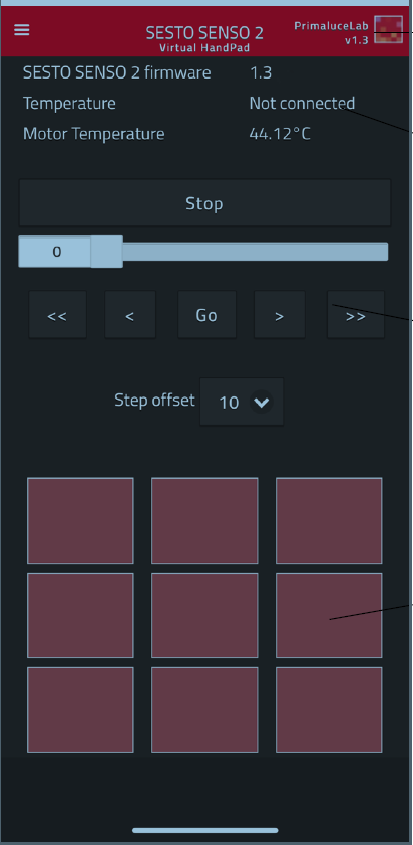
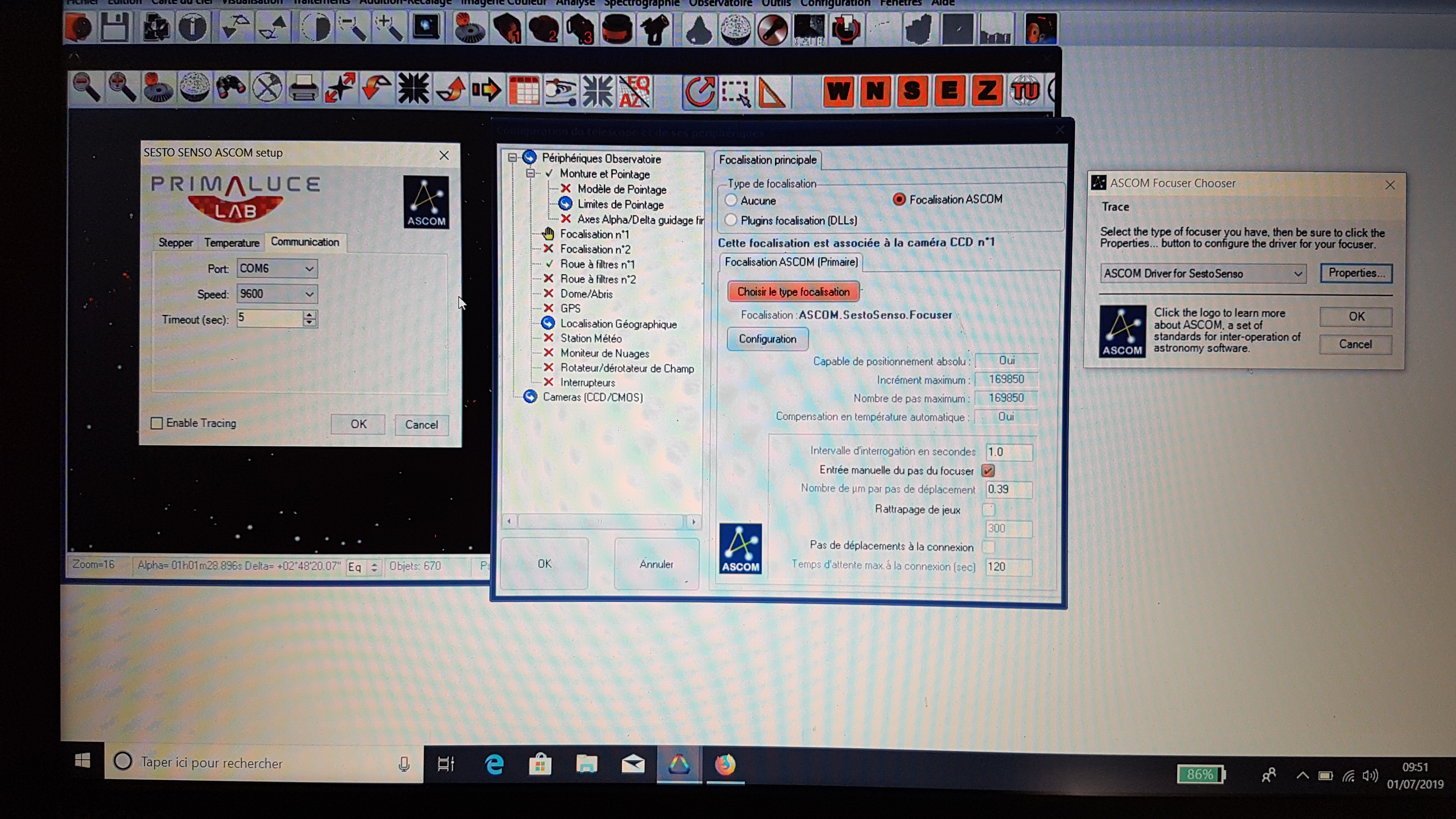
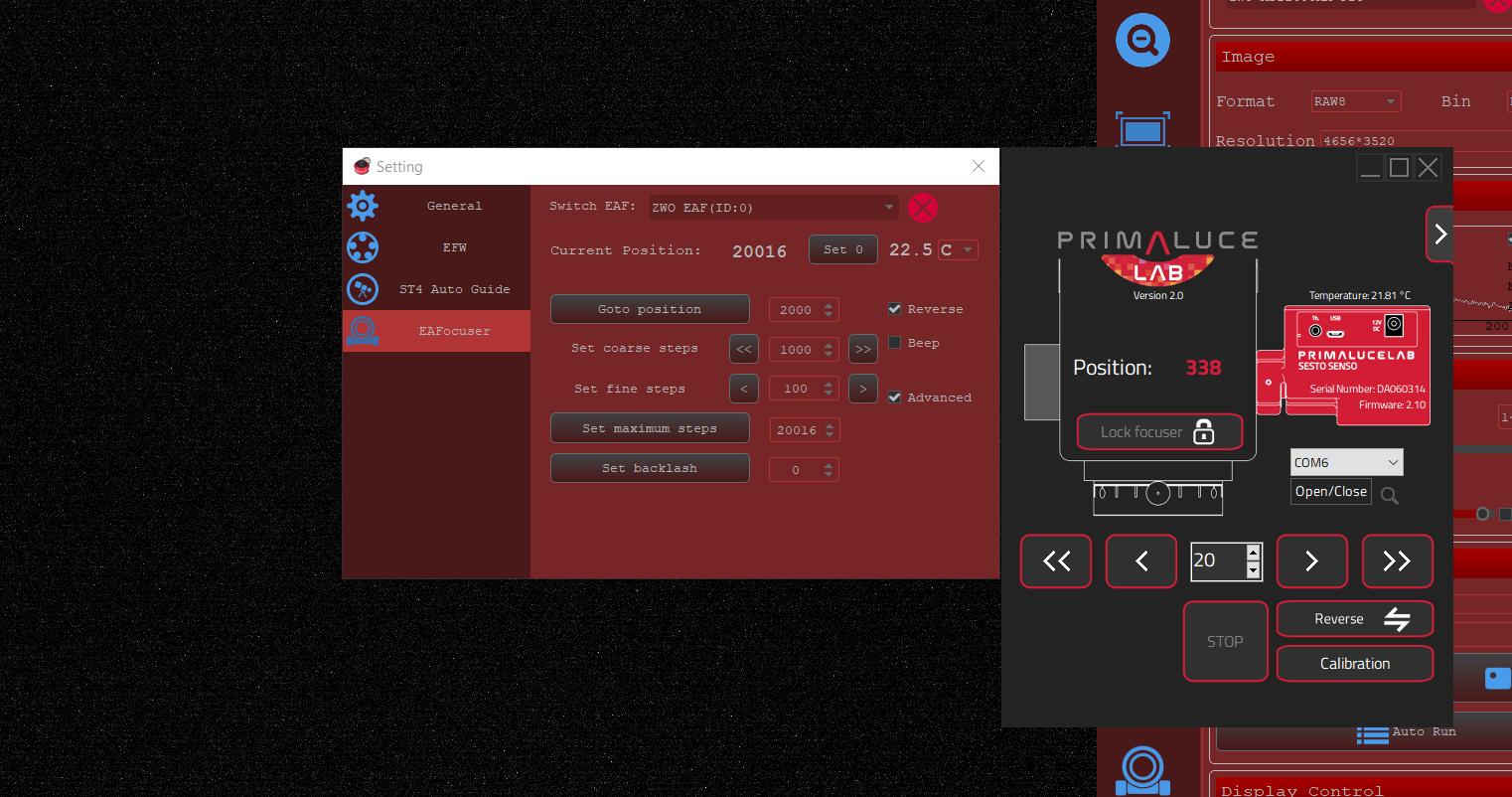
le sesto senso de primaluce dont je suis satisfait n' a pas cette fonction . tout se fait depuis le PC et il est impossible d'effectuer une map manuelle depuis la molette (le moteur la bloque) .
dans ce domaine il existe plusieurs fabricants :l'EAF de ZWO, le Focus Cube de Pegasus et bien d'autres .
possédant déjà deux caméra ZWO , j'ai opté pour EAF avancé de ZWO non pour son prix mais pour le retour positif qu'en ont fait certains .
il existe deux versions
- Standard Version: EAF body, flexible coupling, motor bracket, USB2.0 cable.
- Advanced Version: EAF body, flexible coupling, motor bracket, USB2.0 cable, hand controller, temperature sensor.
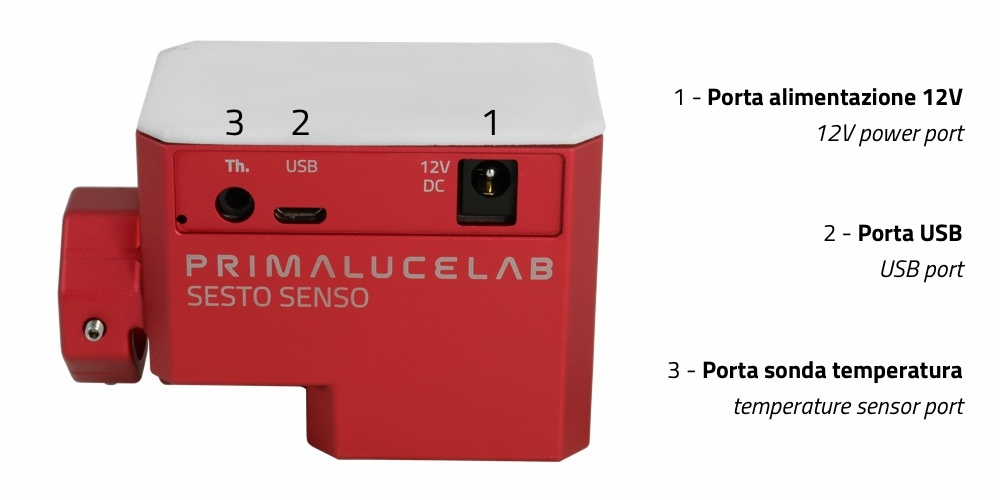
Le boîtier du EAF avancé (59 mm x 52 mm x 41 mm) est doté de 3 ports de connexion :
-une prise d'alimentation électrique 12V DC (avec connecteur jack diamètre extérieur 5,5 mm / intérieur 2,1 mm, centre positif).
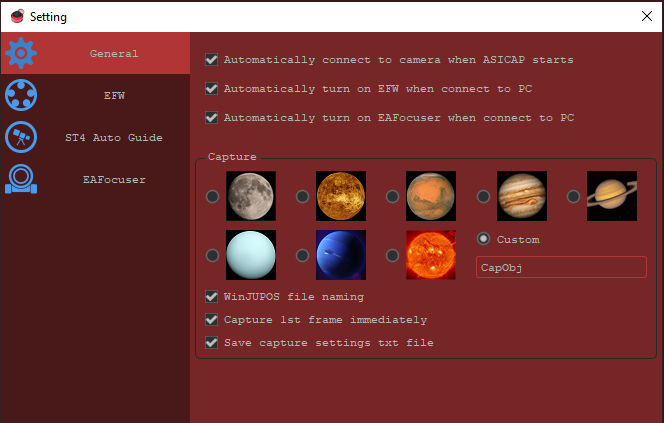
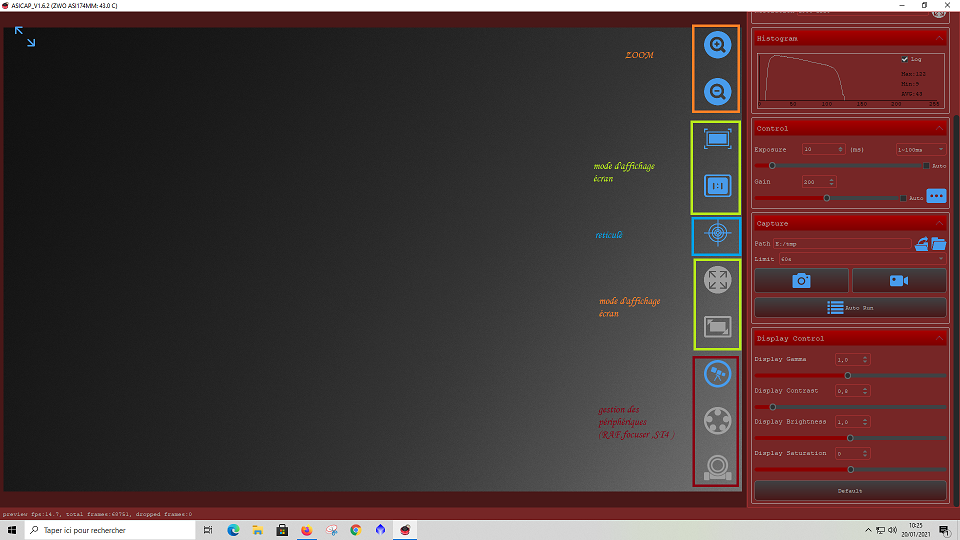
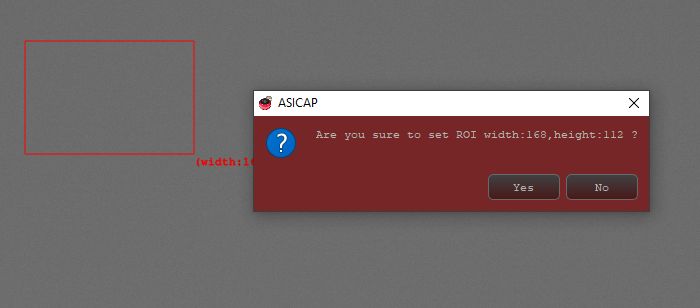
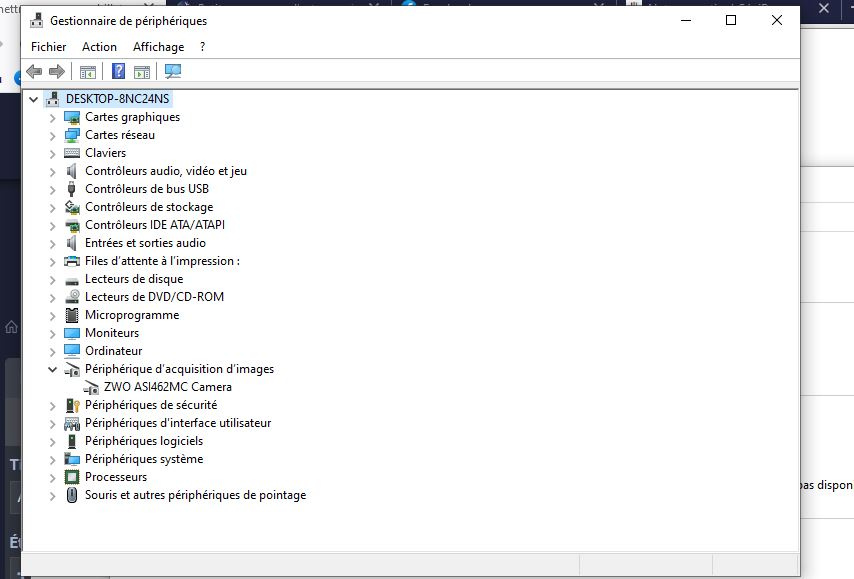
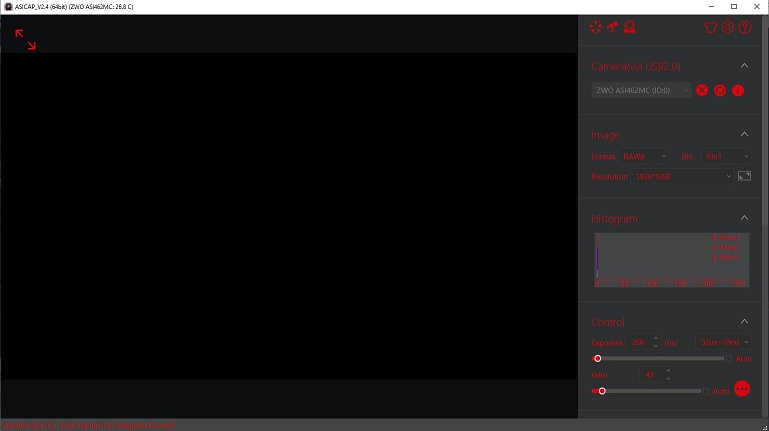
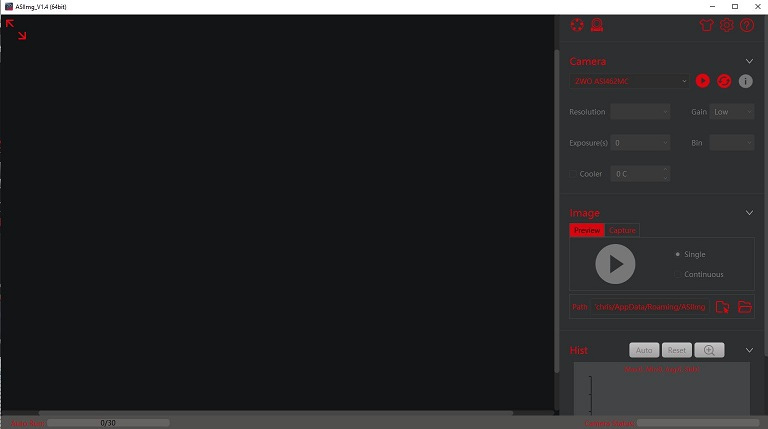
- Un port USB2 pour le contrôler via logiciel ASICAP
-une prise jack femelle pour connecter la sonde de température ou la raquette
Moteur: Step moter, 35mm diameter, 5760 steps to rotate a circle.
alimentation: 12V DC 5.5mm x 2.1mm, center positive
port de données : USB2.0
poids : 277g
Capacité d'entrainement: 5kg

L'EAF avancé s'adapte sur un grand nombre de focuseurs. Il est compatible avec les instruments suivants :
SkyWatcher Astrophotography Reflectors, SkyWatcher Black Diamond, SkyWatcher Dobsonians, SkyWatcher Maksutov-Newtonians.
SharpStar telescopes,
SkyRover telescopes,
TS Optics,
Astro Tech,
Feather Touch,
More focuser will be supported in the further. such as TAKAHASHI telescopes, GSO telescopes.
Recommend to use extra focuser and EAF on SCT and MCT.
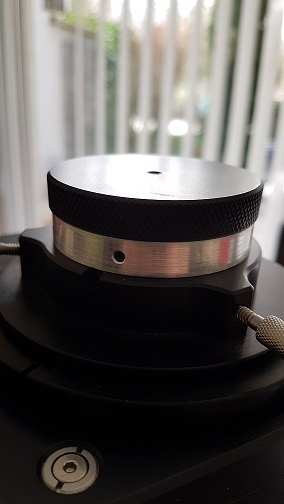
Au déballage du matériel , on constate que ce moteur est plus petit et plus léger que sesto senso.
il est complet et il respire la qualité au premier abord.
par contre la documentation est succincte et aucune clé USB n'est fournie comme chez primaluce
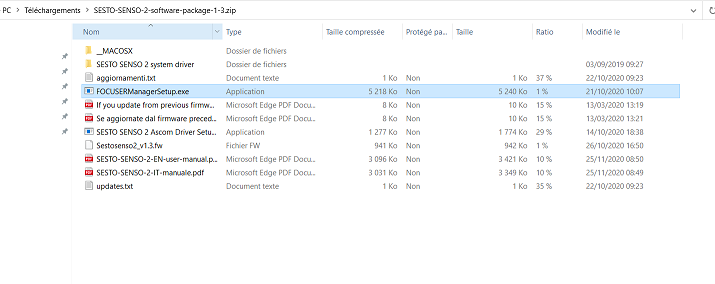
pour cela vous devrez aller chercher l'ensemble des logiciels et manuels sur le site de ZWO
https://astronomy-imaging-camera.com/product/zwo-eaf
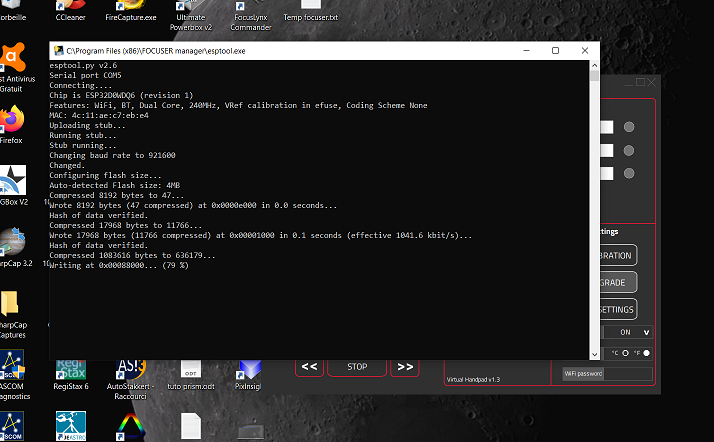
vous devrez télécharger le drivers ASCOM EAF v1.0.1.8 et le logiciel propriétaire ASICAP de ZWO v1.6.2
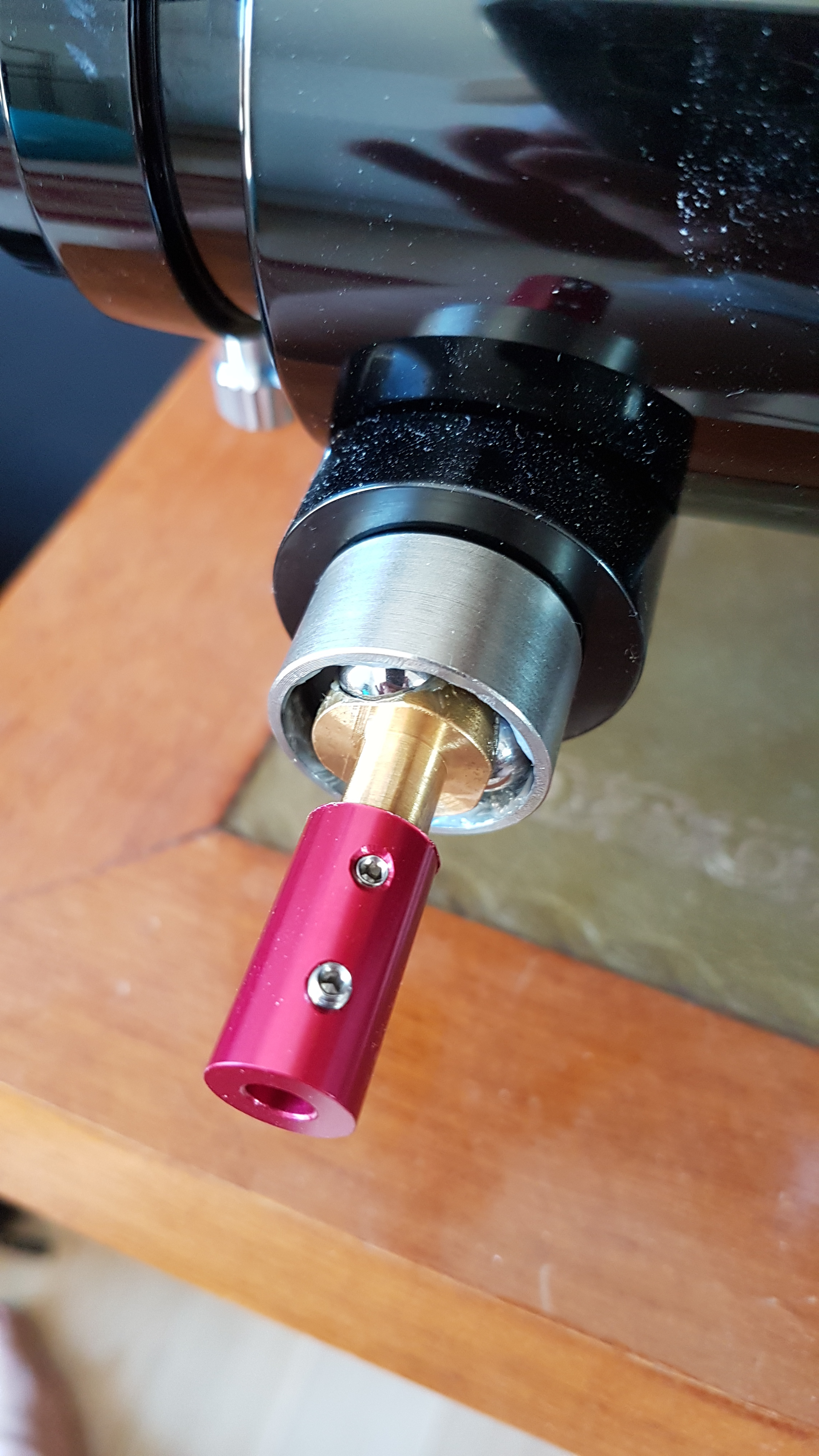
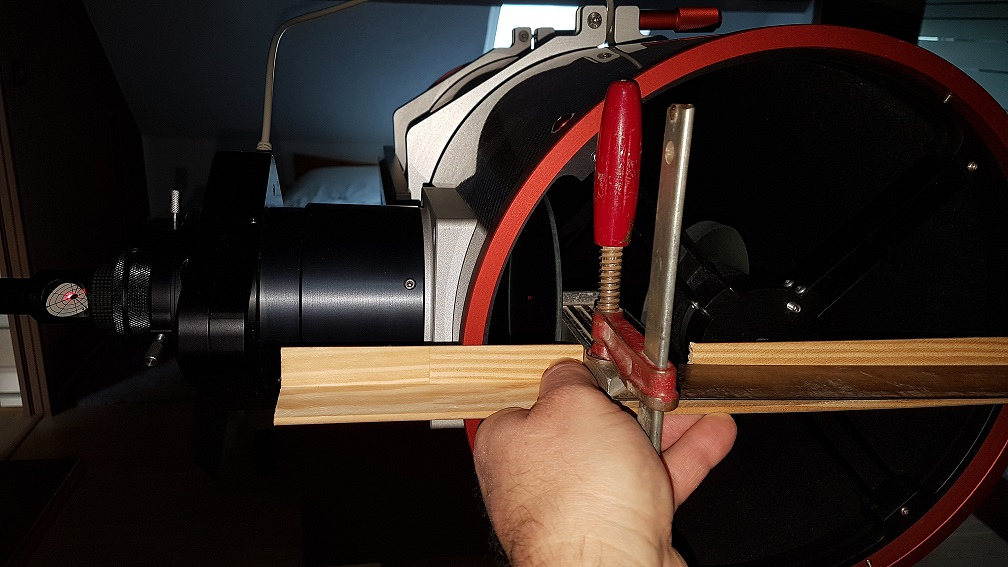
il s'installe directement sur la molette non démultiplié du focuser . il sera donc moins précis que le sesto senso mais peu importe ce n’est pas ce que je lui demande.
jusque là aucun soucis notoire a constater mais .... cela n'a pas duré longtemps
les vis sont trop courtes pour remplacer celle en place du PO . le seul moyen est de la mettre sur le pas de vis qui sert à régler la dureté du crayford
après avoir installé le moteur sur le focuser avec un peu de difficulté ,(un peu plus compliqué que sur le sesto) et raccordé l'ensemble des connecteurs nécessaire à son pilotage je suis allé de déboire en déboire.
autant le système répond facilement avec la raquette autant il se met en sécurité des que je veux le piloter depuis le PC.
A nue sans être posé il répond correctement mais des qu'il est raccordé sur le PO il ne veut pas bouger ou si peu .
j'ai donc essayé de jouer sur les visseries , sur l'attache du moteur sur le PO, de réinstaller les logiciels rien n'y fait .
après deux heures d’acharnement je décide de l'installer de l'autre côté sur le démultiplicateur 1/10 .
Et là miracle , il décide enfin de fonctionner mais avec une course réduite et très très lente.
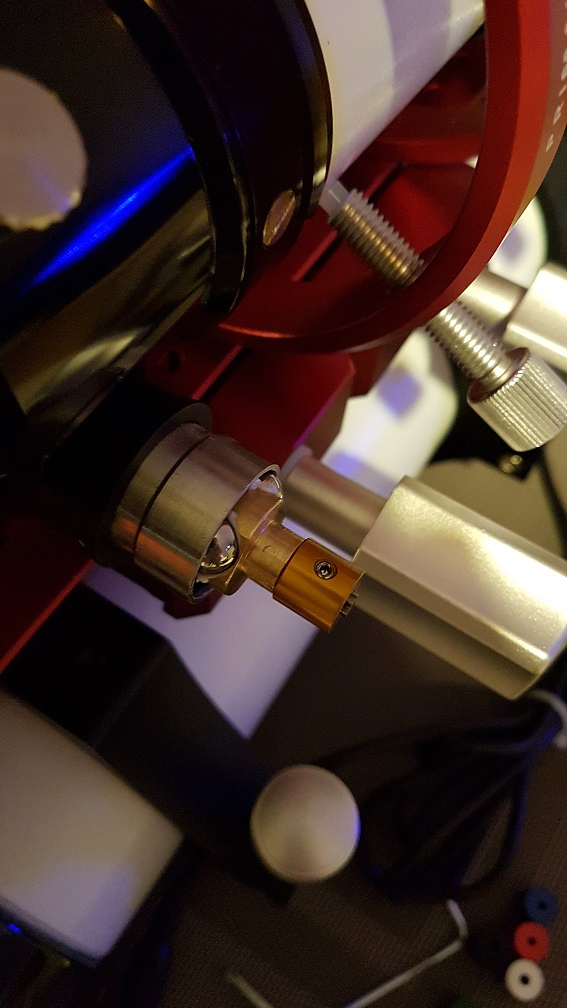
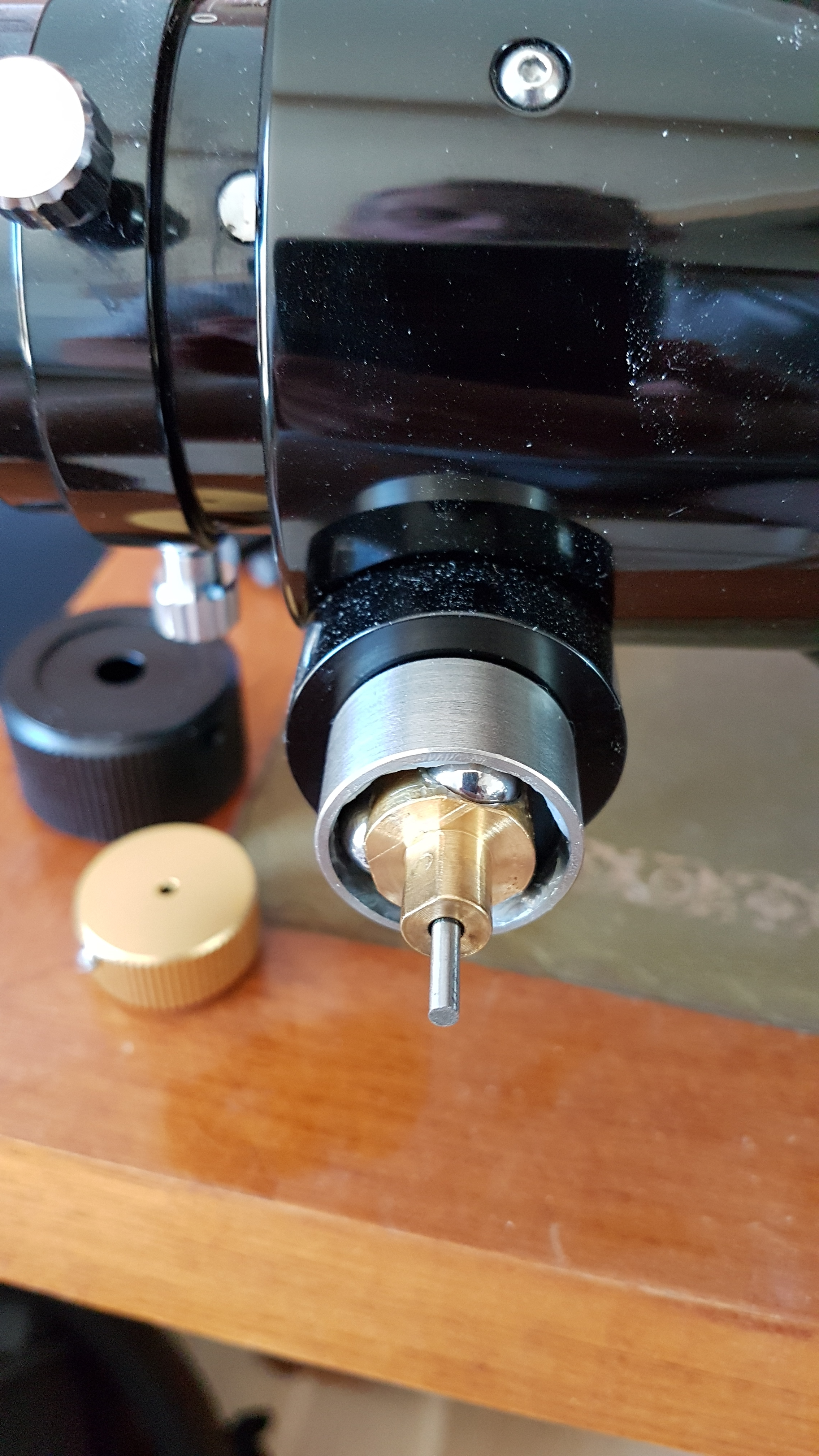
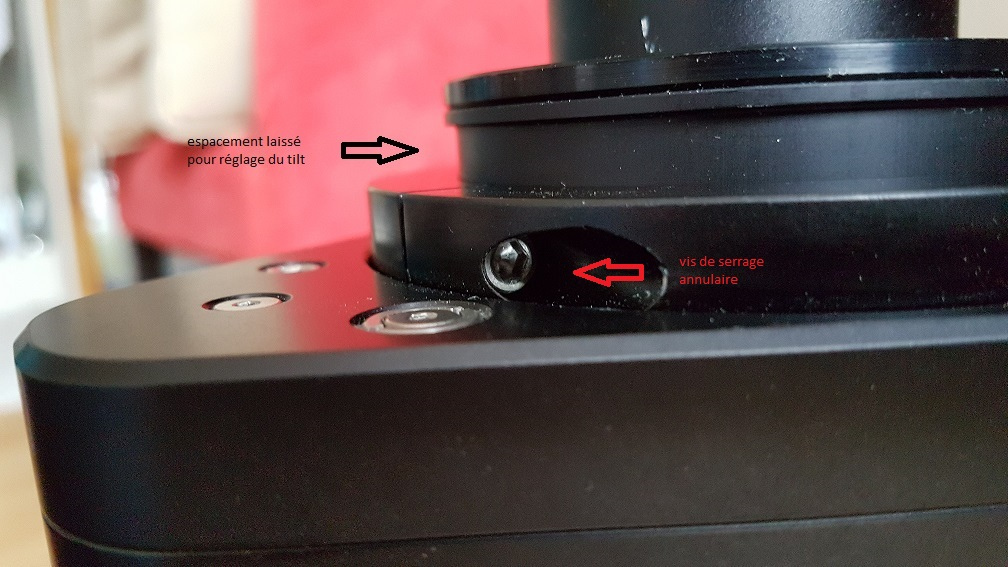
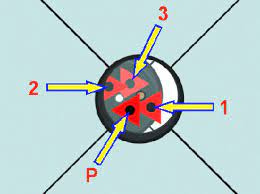
en faite il s'est avéré que la vis qui servait à maintenir la patte de fixation du ZWO sur le PO venait en buté sur le "boulon sans tête" qui règle la dureté du focuser
même en mettant une rondelle pour essayer de laisser un espace entre les deux vis cela ne suffit pas .
soit je scie la vis soit j'essaye de remplacer les 4 vis existantes pour solidariser la patte du ZWO sur le PO
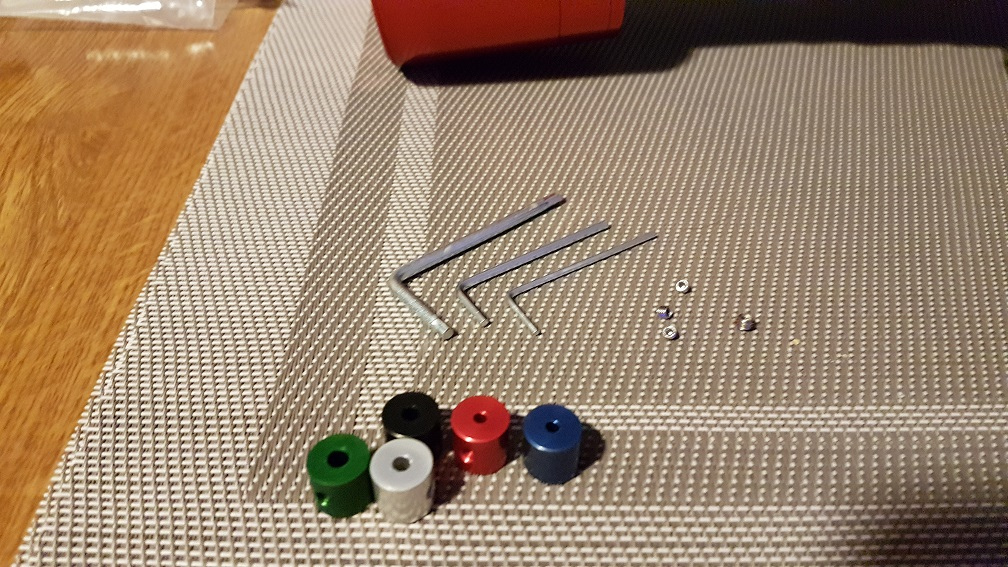
J ai opté pour la deuxième solution avec seule possibilité de n'en remplacer que deux : boulons de diamètre 3mm/3 cm de long avec rondelle et un écrou.
il faut faire attention au serrage des boulons autrement vous bloquez le moteur.
le bon côté c'est qu'il est silencieux. on ne l'entend pas!
ATTENTION : d'autres lunettes sont aussi concernées par ce problème comme les Kepler et la 120 esprit suivant d'autres forumeurs !*
un autre a du faire des modifications sur le fil suivant
http://www.astrosurf.com/topic/129628-eaf-zwo-mesure-de-température/
https://www.baader-planetarium.com/en/2"-bds-sc-baader-diamond-steeltrack.html
Pour cela il y a 5 modifications à faire
- Coupé de 5mm la tige coté bouton sans réglage fin ( ça empêche pas de le remonté, fait à la drimel, bien refroidir )
- Inverse le coté de la vise de serrage du focus
- élargir le trou du support ZWO EAF
- coupé le support ZWO à mi longueur
- utilisé des vis plus longue ( mais pas trop )
Pour les Takahashi vous devrez opter pour ce Kit de fixation

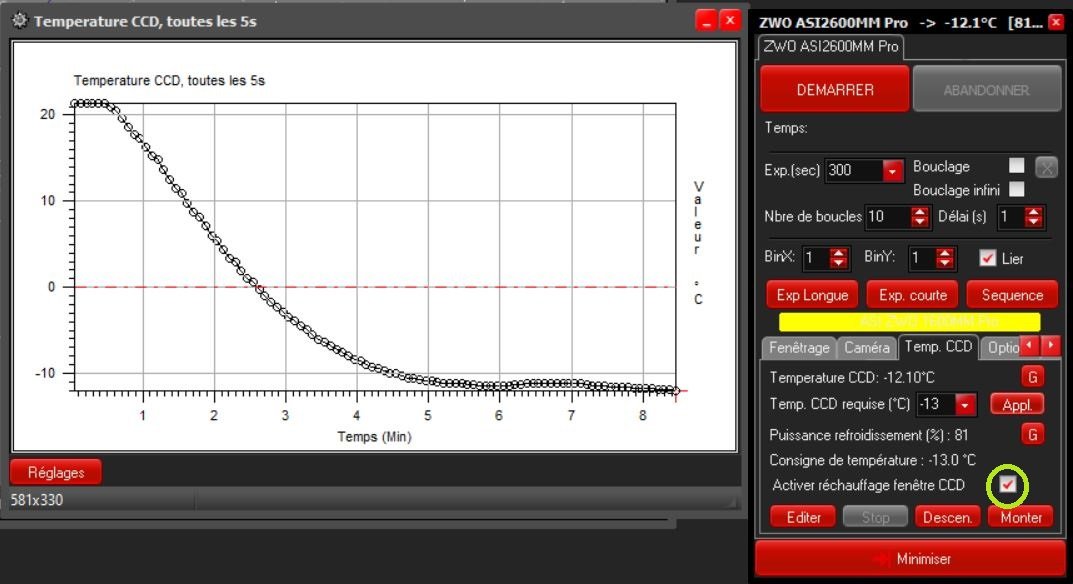
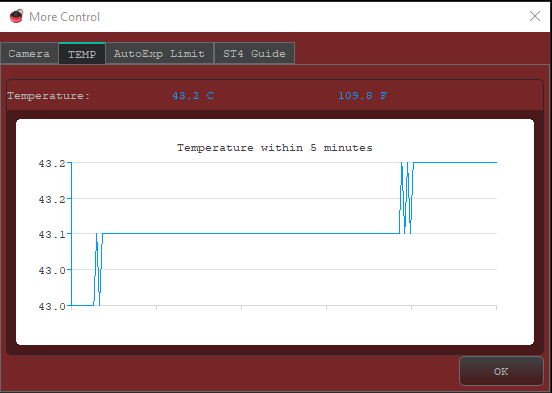
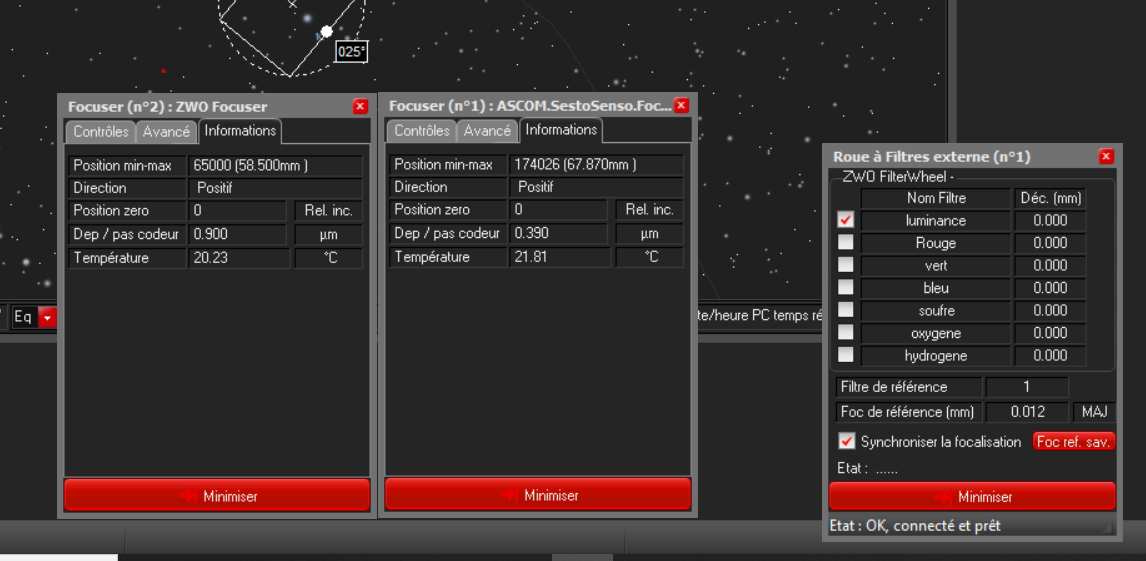
passons à la température :
j'essaye avec le logiciel propriétaire et je le compare au sesto senso et à ma Netatmo
le décalage est de 1°C avec la sonde internet et moindre en mettant la sonde externe.
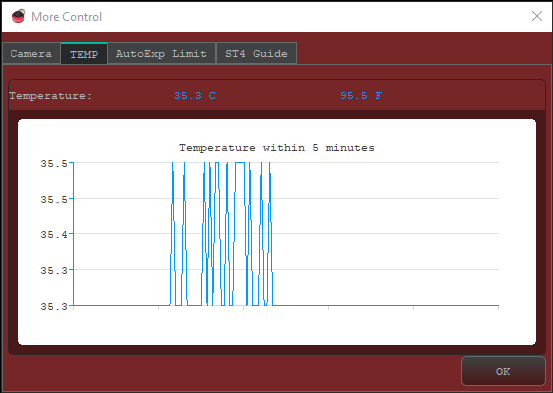
ce qui est plus inquiétant c'est quelle varie régulièrement de quelques dixième de °C.
je passe à Prism pour vérifier ce que je viens de constater : pas mieux.
autre mauvais point , il faudra choisir entre la sonde externe ou la télécommande car elles utilisent la même entrée.
Alors que dire : déçu même si au final j ai pu le faire fonctionner normalement. il fait le job mais sans plus.
il n'est pas normal qu'un moteur de mise au point qui se dit de qualité pour un prix contenu ne s'adapte pas à tous les Portes Oculaires .
![20191016_153454[1].jpg](http://www.astrosurf.com/uploads/monthly_2019_10/5dab5837b5faa_20191016_1534541.jpg.ad5e5505de8fa1d5e37cafb0426f3a15.jpg)
![20191016_160611[1].jpg](http://www.astrosurf.com/uploads/monthly_2019_10/5dab5891dc16e_20191016_1606111.jpg.95372ea93171b00bda8265d6d994f56e.jpg)
![20191019_173142[1].jpg](http://www.astrosurf.com/uploads/monthly_2019_10/5dab58cce998d_20191019_1731421.jpg.dd8c60505151248a32fa9760f80db9cc.jpg)

- En savoir plus…
- 3 commentaires
- 4 454 vues