

le sestosenso de prima luce

afin de motoriser mon PO Feather Touch de Starlight sur mon Zen 250mm , j'ai acheté le Le moteur de mise au point SESTO SENSO de prima luce.
j'ai finalement décide de l'installer sur mon Astrotech 106LE sans certification d'une quelconque compatibilité.
Power 10-15V, suggested 12V 0.8A max
Maximum weight load (vertical position): 7Kg
Control: USB port
Resolution: 0.7um/step +/-5% 3200step/turn
Working temperature -15°C/+50°C
Max excursion with 1/10 transmission: 29m
PC control: SESTO SENSO software and ASCOM driver
Temperature sensor Optional
je vous rassure il s'adapte sur (presque) tous les Portes Oculaires avec les 5 adaptateurs fournis dans le pack.
si vous ne trouvez pas l'adaptateur requis , il existe deux autres adaptateurs pour les 2,5" et 3 " :
-Focusers PrimaLuceLab Hybrid-Drive pour AIRY Refractors (ED72, APO80, BLACK 80T, ED90, ED100, APO104T, APO120, et APO150T)
-Orion Optics UK, VX et CT focusers
-Télescope GSO RC 2" et 3" focsuers
-Sky-Watcher ED80, ED100, ED120, et Newton f/4 - f/5 télescope Crayford focusers
-Focusers Baader StellTrack
-Focusers MoonLight
-Instruments Starlight 2" FeatherTouch focusers
-Instruments Starlight 2,5" et 3" focusers FeatherTouch (avec adaptateur 33mm en option, non inclus)
Le SESTO SENSO se compose d'une boîte métallique compacte (mesurant 87 x 60 x 43mm) qui détient le moteur et l'électronique de contrôle.
au premier abord , il transpire la qualité aussi bien dans les matériaux utilisés , dans l'esthétique , dans sa finition que dans son applicatif
il pèse exactement 350 gr montée et s'installe en lieu et place du bouton de mise au point micrométrique par deux attaches distinctes.
il est livré avec :
- un câble micro-USB un peu trop long à mon gout (j'en parle un peu plus loin) mais pour ceux qui voudraient le raccorder sur leur PC cela conviendra parfaitement.
- un lot de visserie . Faite très ATTENTION à ne pas les perdre (même si ils en fournissent une de plus) car elles sont assez petites . lors de la pose j'en ai perdu une . comme quoi c'est bien pensé d'en fournir une de plus.![]()
- 2 clés Allens . toujours rageant d'avoir à acheter les clés adaptées
- 5 adaptations pour les différents Portes Oculaires
- 1 câble d'alimentation 12V allume-cigare très utile lorsqu'on est en nomade
- une clé USB avec documentation PDF, les logiciels dédiés de contrôle et les pilotes ASCOM.
avec la sortie de EAF de ZWO , on peut dorénavant trouver ce boitier pour un prix plus contenu de 299€ et d'une sonde thermique à 25€
https://www.primalucelab.com/astronomy/sesto-senso-robotic-focusing-motor.html
https://www.primalucelab.com/astronomy/temperature-sensor-for-sesto-senso.html
ce boitier ne comporte pas de sonde interne. si vous voulez faire varier la mise au point de votre PO en fonction de la Température extérieur il vous faudra l'acheter.
j'ai comparé sa précision avec une station météo : on ne peut faire mieux et sa précision est de 0,01°C ce qui est très largement suffisant ( même un peu trop ) !
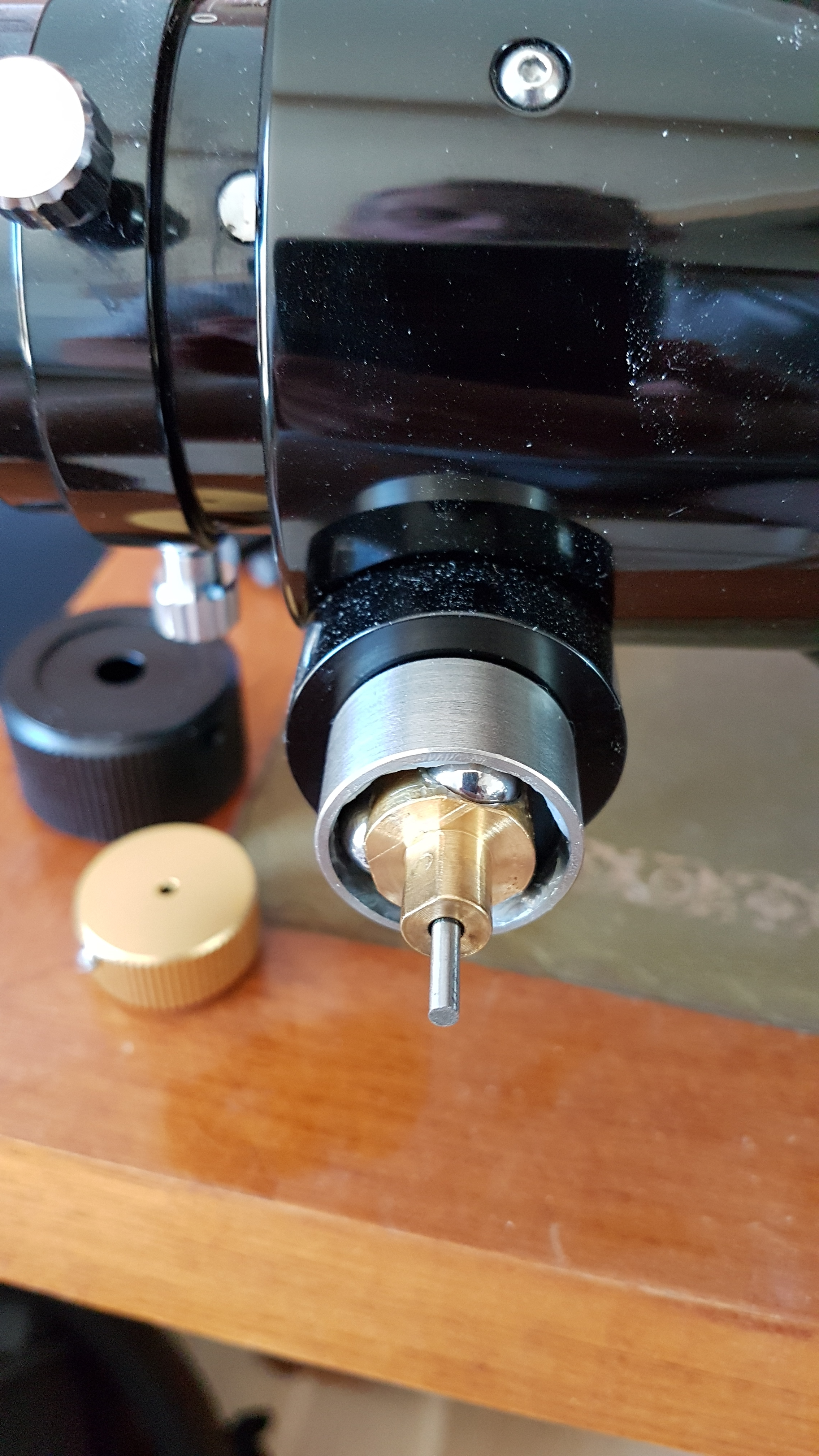
il est important avant de tout démonter de rentre l'allonge du porte oculaire. vous comprendrez vite pourquoi (le point de référence parckage )
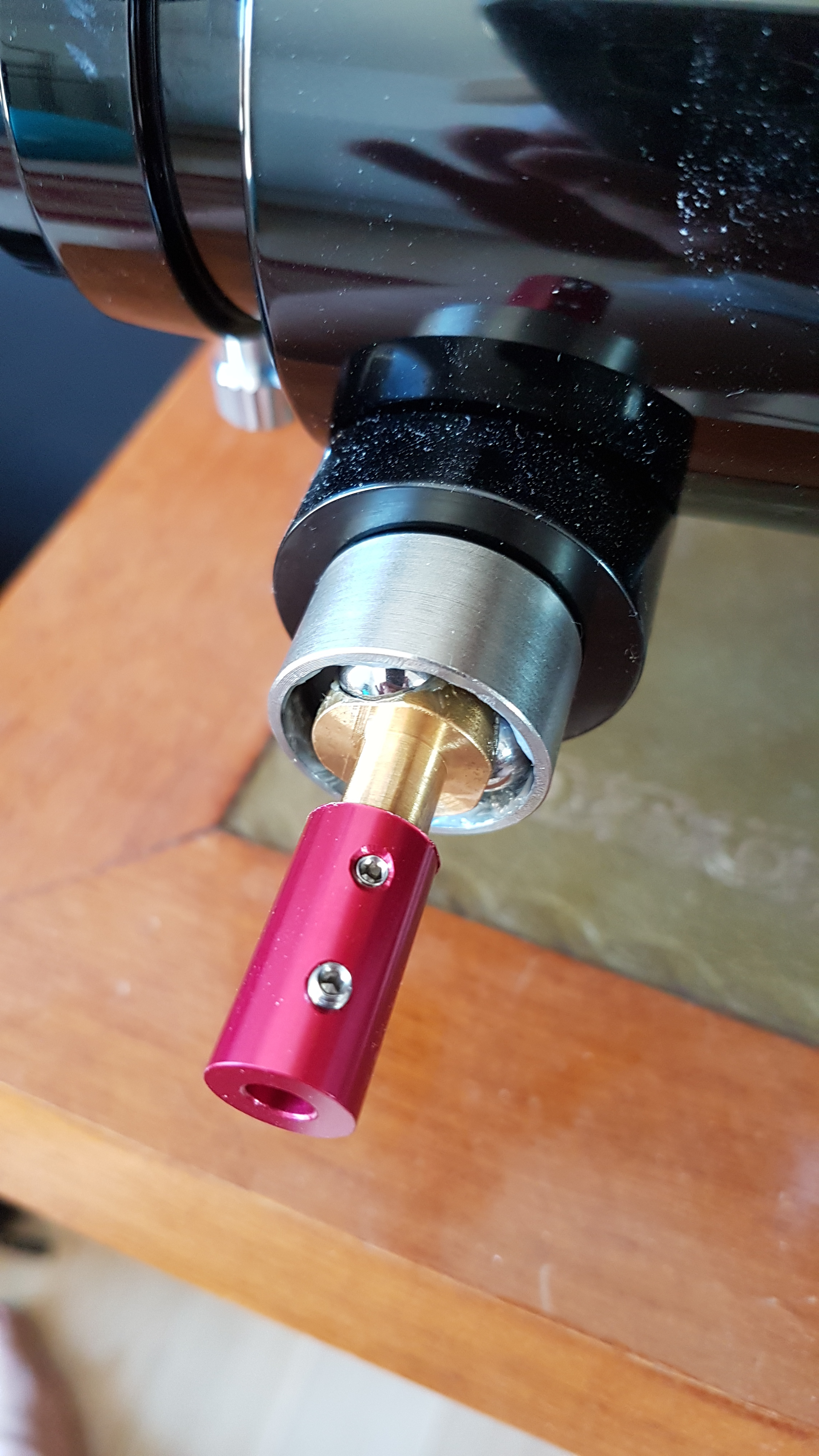
après avoir démonté les molettes du PO ,vous devrez fixer sur l'axe du PO a un des adaptateurs fournit par le constructeur. les deux vis feront la liaisons entre l'axe du PO et l'axe du boitier sesto.
il vous suffira ensuite d'emboiter le sesto et de le retourner pour solidariser le tout. une fente est prévue à cet effet pour accéder aux vis.
ensuite il vous restera a serrer " le système de cerclage" et d'y fixer deux autres vis de blocages.
non seulement il ne bougera pas mais ce cerclage permet de protéger l'axe du PO de toute condensation ou poussière.
passons au raccordement et à la reconnaissance du matériel .
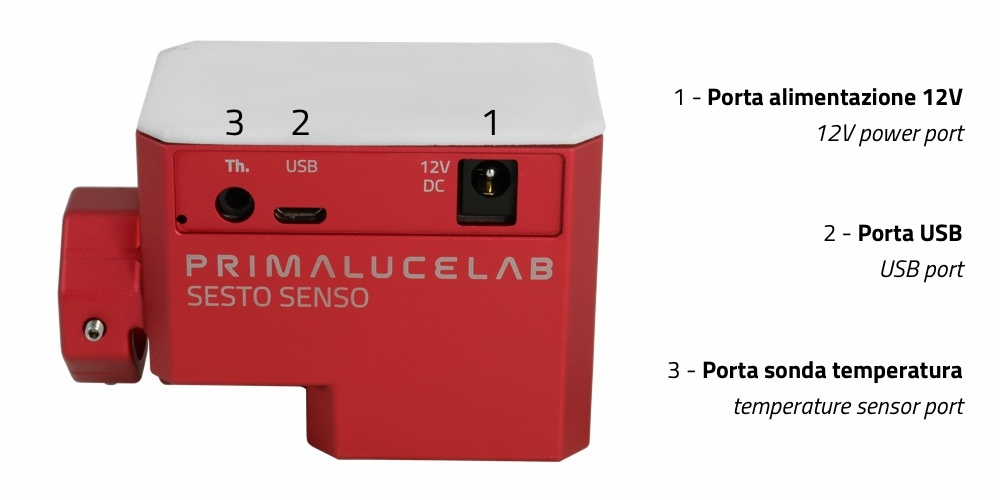
le raccordement :
- la troisième fiche permet de connecter la sonde
- la deuxième permet de relier le boitier au PC en direct mais il est tout à fait possible de passer par le hub USB de la caméra (ici une ASI 1600mm pro) .
- la première fiche permet de l'alimenter. comme je suis en poste fixe pour le moment il vous faudra vous doter d'un adaptateur 5.5/2.1 mm vers 5.5/2.5 mm pour raccorder votre doubleur ou votre boitier d'alimentation 220V~/12V
la clé USB fournit vous donne un manuel d'installation en plusieurs langues et trois répertoires : drivers ascom , drivers sesto senso et firmware sesto senso
si votre PC est en 64 bits vous devrez utiliser l'applicatif "sestosenso setup" pour installer le logiciel d'utilisation et installer le drvivers ascom :sestosenso.ascom.driver.xx.x.x.x.x86 et non le x64 . les deux fonctionnent mais je vais le préciser plus bas la raison de ce choix
c'est un jeu d'enfant pour l'installer et le faire reconnaitre. il n'y a pas plus simple il suffit de suivre la doc pas à pas.
lorsque vous lancerez votre logiciel "sestosenso software" qui est sur votre bureau et il vous demandera de choisir le port (souvent com 6) et de cliquer sur open.
voila votre moteur est reconnu et est utilisable en tant que tel
il vous indique la température actuelle et doit être modifiable par pas de 20 (valeur d'origine).
mais avant d'aller plus loin , vous devrez faire une calibration. en clair : lui indiquer la fin et le début de translation du tube du PO.
dans mon cas pour une translation de 66 mm j'ai plus de 163000 pas soit 0,4µm/pas .
là encore c'est un jeu d'enfant....![]()
en haut à droit de votre applicatif , vous avez l'option de fonctions avancées.
trois vitesses de bases sont disponibles : fast , medium et slow.
cela vous permet d'aller directement un point de focalisation si vous le connaissez ou en fin de séance de parcker votre PO.
vous entrez la valeur et cliquez sur GO TO.
vous pouvez même indiquer une valeur de référence (souvent le point de focalisation ).
pour parcourir le 66mm de translation , il lui a fallu moins d'une minute 50s à 90° avec un poids de 1240gr.
Premier test du sesto senso sans le logiciel "Prism V10" :
comme le PO était rentré , j'ai du aller chercher le backfocus assez loin de son point d'origine : 73500 pas sur les 163400 existants.
c'était le cas idéal de vérifier son aptitude et sa réactivité car à ce moment là je pointais Véga qui est assez haut sous nos latitudes en cette période.
le système a réagis au quart de tour et n'a posé aucun soucis pour aller rapidement au point désiré. cela peut paraitre long 80s mais il y a tellement tant de chose à faire que vous n'y faites même pas attention.
il est très réactif et assez silencieux . je vous avoues qu'il est préférable de l'entendre.....![]()
Vous comprendrez vite à quoi sert les touches d'avances proposées au démarrage du logiciel et nul besoin de vous l'expliquer
arrivé au point désiré ,vous pouvez affiner par pas de 200 visuellement pour obtenir une bonne MAP.
n'ayant pas le logiciel prism à ce moment là , je n'ai pas pu aller plus loin dans l'affinage de cette MAP mais ce que je visualisais à l'écran suffisait à mes attentes.
je n'ai pas non plus pu vérifier le backlash ou le constater .
par contre , j'ai laissé tomber la MAP manuelle car c'est le premier soucis auquel j'ai été confronté .
cette map manuelle doit être faite moteur éteint pour ne pas l'endommager. le moteur n'a d'autre part plus de référence de positionnement et l'on doit le repositionner au point de parkage pour le remettre en service.
je vous conseille plutôt de mémoriser les point de MAP pour passer rapidement de l'oculaire à la CCD et de rentrer le "tube" avant l’arrêt du matériel.
test sur le terrain avec le logiciel "Prism V10" :
ayant reçu ma licence pour Prism V10, j'ai sauté le pas pour configurer mon nouveau focuser.
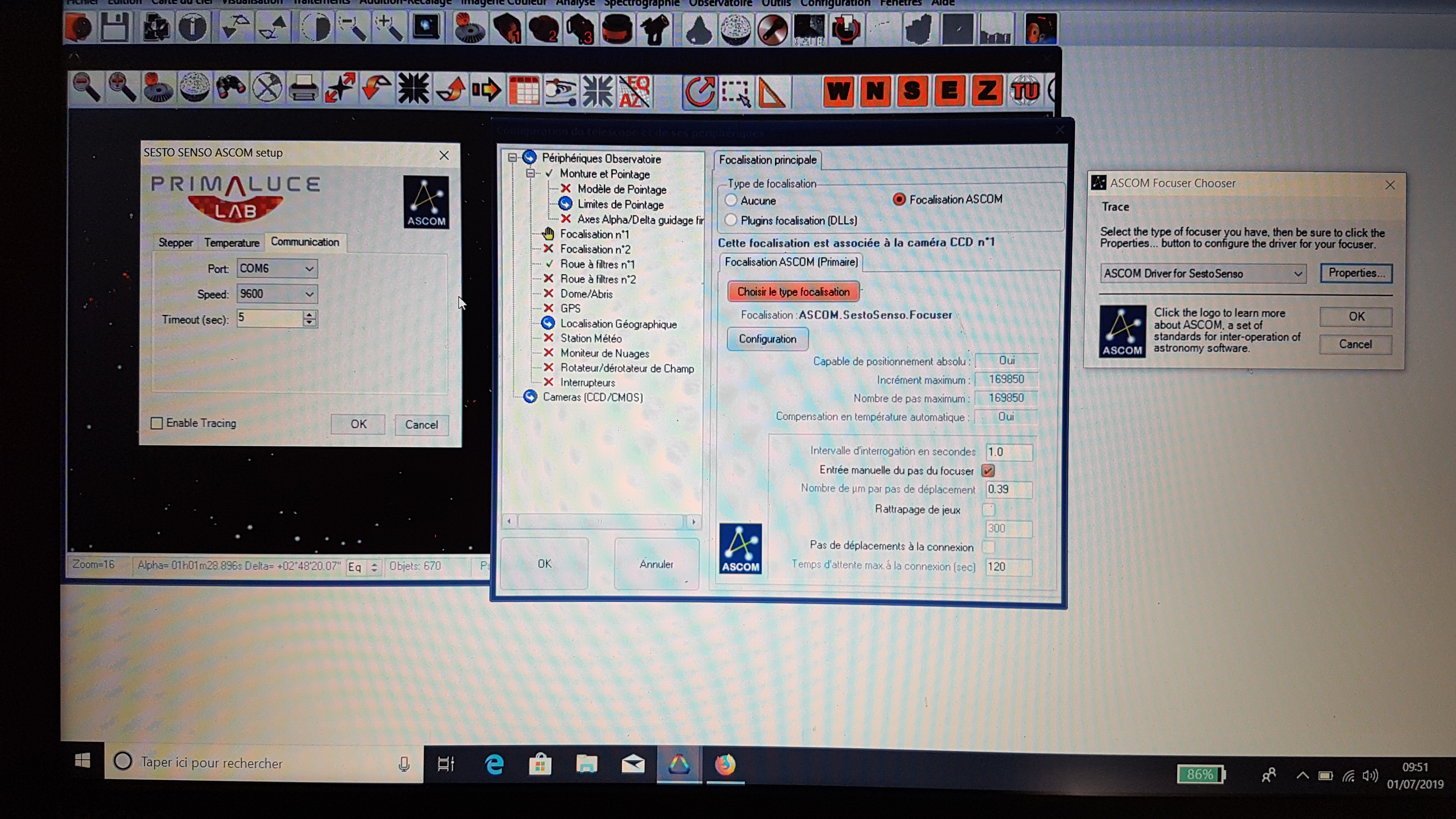
après de nombreuses recherches et essais, j'ai fini pas comprendre que le drivers ascom qui doit être installé est celui en x86 et non pas en x64.
pourtant avec le logiciel propriétaire,il fonctionnait parfaitement avec l'autre drivers.
le paramétrage se fait dans la configuration du matériel , focalisation N 1 , focalisation ascom, ascom drivers for focuser sesto senso, remplir les propriétés et valider
les paramètres que j'ai modifié pour être reconnu a été le port "COM 6" dans l'onglet communication et le nombre de µm par pas de déplacement.
dans mon cas j'ai un débattement de 66,5 mm environs pour 173000 pas soit 0.38 µm/pas.
Aucun paramétrage ne peut se faire lors que le moteur de mise au point est lancé
au lancement de l'onglet "télescope " , Prism V10 initialise la monture (réel ou virtuelle ) et l'ensemble des équipements annexes outres les caméras .
plusieurs panneaux s'affichent dont celui du focuser.
c'est a ce moment que vous devrez paramétrer les différentes positions suivant l'utilisation que l'on veut en faire et les mémoriser.
précision de la mise au point : lors de ce test , le vent était un peu présent mais ça n'aura que peu d'incidence sur mon test (à part voir Jupiter trembler )
comme je l'ai préciser en haut , il est important de toujours mettre en position 0 le moteur de mise au point et en conséquence d'avoir le PO rentré.
sans cela il n'a plus de référence et ne sait plus ou il se trouve. c'est un peu dommage ou alors il m'échappe encore à ce jour un de ces paramètres.
il aurait été judicieux du constructeur d'y apposer une petite mémoire avec une pile pour conserver cet état.
ma MAP se trouve vers 73500 pas (27 mm du PO). je lance l'applicatif et directement je lui demande d'aller a la valeur demandée.
la encore il s’exécute sans broncher pour aller se positionner au point considéré au bout d'une minute.
Attention , sous Prims le positionnement n'est pas déterminé en "pas" mais en "mm". il y a bien la correspondance mais ce sont bien des valeurs en millimètre qu'il faut rentrer.
ça déroute un peu mais lorsque ces valeurs seront mémorisées cela n'aura plus aucune importance.
il suffira alors de cliquer sur la position mémorisé comme "jupiter" et il répondra immédiatement pour se positionner tout seul à ce point de référence.
la mise au point a été au début un peu laborieuse car je l'ai faite sur Jupiter qui ondulait en fonction de la turbulence présente.
pour trouver le bon positionnement j'ai préféré au bout d'un moment réaliser cette MAP sur une de ces lunes. comme ce n'est qu'un point il est plus facile de faire la MAP sur cet objet que de faire attention aux détails des nuages de Jupiter.
ensuite j'ai affiné en faisant attention aux détails mais c'eszt assez compliqué avec de la turbulence
en variant par pas de 20 sur le logiciel sesto , on constate assez rapidement cette variation au bout d'une Centaine de pas.
Il en a été de même avec la MAP sur une étoile avec un masque de bahtinov.
en grossissant l'étoile au maximum sur l'écran (180x) grâce au logiciel ASICAP , on constate en effet un lègé déplacement de la barre centrale au bout d'une centaine de pas.
conclusion : la précision de ce moteur (ou focuser dans le jargon) est redoutable. certains considèrent que ce niveau de précision n'est pas visualisable ou n'a pas d'utilité.
non seulement ,j'ai pu le constater mais il a bien une incidence sur la MAP au bout d'une centaine de pas.
rappel du masque de bathinov : la lumière provenant d'une étoile va former une figure composée d'un X et d'une barre qui coupe cet axe . ce barre centrale se déplacera en fonction de la MAP.
si vous constater un message d'erreur sur la reconnaissance des pas du focuser , il vaut aller le reparamétrer dans l'onglet "configuration" . pour mon cas c'est du à un conflit de port USB
pour le test de la focalisation veuillez lire le post "les fonctions principales du logiciel PRISM V10" ![]()
mesure du capteur de température : afin de connaitre la précision obtenue par la sonde thermique , j'ai comparé les données du sesto senso avec le capteur Mbox de astromi.ch et une station de météo de netatmo.
le sesto permet d'avoir une précision au centieme de °C et réagit automatiquement des qu'on y colle une source de chaleur : précision et réactivité sont les point fort de ce système.
un décalage de 0,7°C a été constaté avec la MBox et de seulement 0,05 ° C avec la netatmo (du à la précision de cette sonde).
mesure du backlasch et variation en fonction de la T°: en cours d'élaboration
points positifs :
qualité et finition du produit
logiciel ergonomique et très simple d'utilisation
capacité de charge importante et supérieur à certains du marché : 7Kg
protection de l'axe de mise au point contre l’humidité et la poussière
très bonne fixation au PO
points négatif :
Le poids 350gr
Prix contenu mais supérieur à certains du marché
Besoin d'une sonde externe
positionnement du focuser à l’arrêt
user-manual-SESTO-SENSO-v2-EN.pdf





-
 1
1
-
 1
1
3 Commentaires
Commentaires recommandés
Créer un compte ou se connecter pour commenter
Vous devez être membre afin de pouvoir déposer un commentaire
Créer un compte
Créez un compte sur notre communauté. C’est facile !
Créer un nouveau compteSe connecter
Vous avez déjà un compte ? Connectez-vous ici.
Connectez-vous maintenant