

les fonctions principales du logiciel PRISM V10

le logiciel prism V10 permet comme les autres logiciels gratuits d'astronomies de positionner la monture en fonction des objets célestes .
il possède bien d'autres fonctions très utiles pour affiner la position de la monture ou faciliter les traitements d'images brutes.
celles que je vais vous présentées sont très utiles et j’espère qu'elles vous inciteront à sauter le pas (je n'ai pas d'action dans cette entreprise ![]() )
)
le positionnement de la monture :
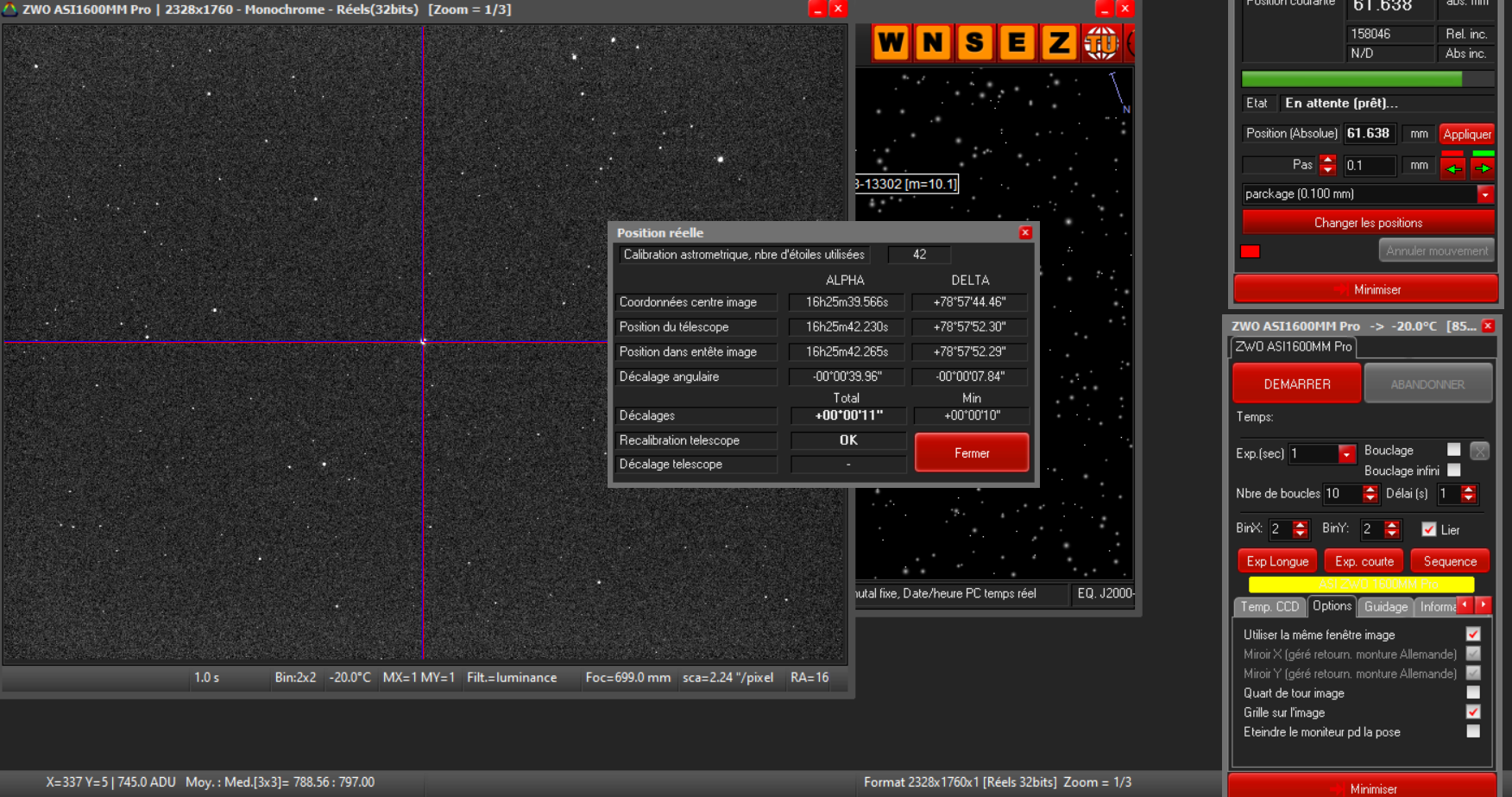
après avoir effectuer un alignement du télescope sur trois étoiles avec la raquette de la monture , il persiste toujours une erreur résiduelle entre la position réelle de la monture par rapport au logiciel.
cette fonction va vous permettre de bien synchroniser ces deux équipements (logiciel/monture)
la méthode est assez simple : prenez une photo , un clic droit sur la photo puis une calibration astrométrique . le logiciel va comparer l'image à une base de données pour se référencer et calculer la position réelle de la monture .
après avoir fait ce calcul , le pointeur se retrouve sur la position photographiée. dans mon cas l'erreur n'était que de 11arcsec.
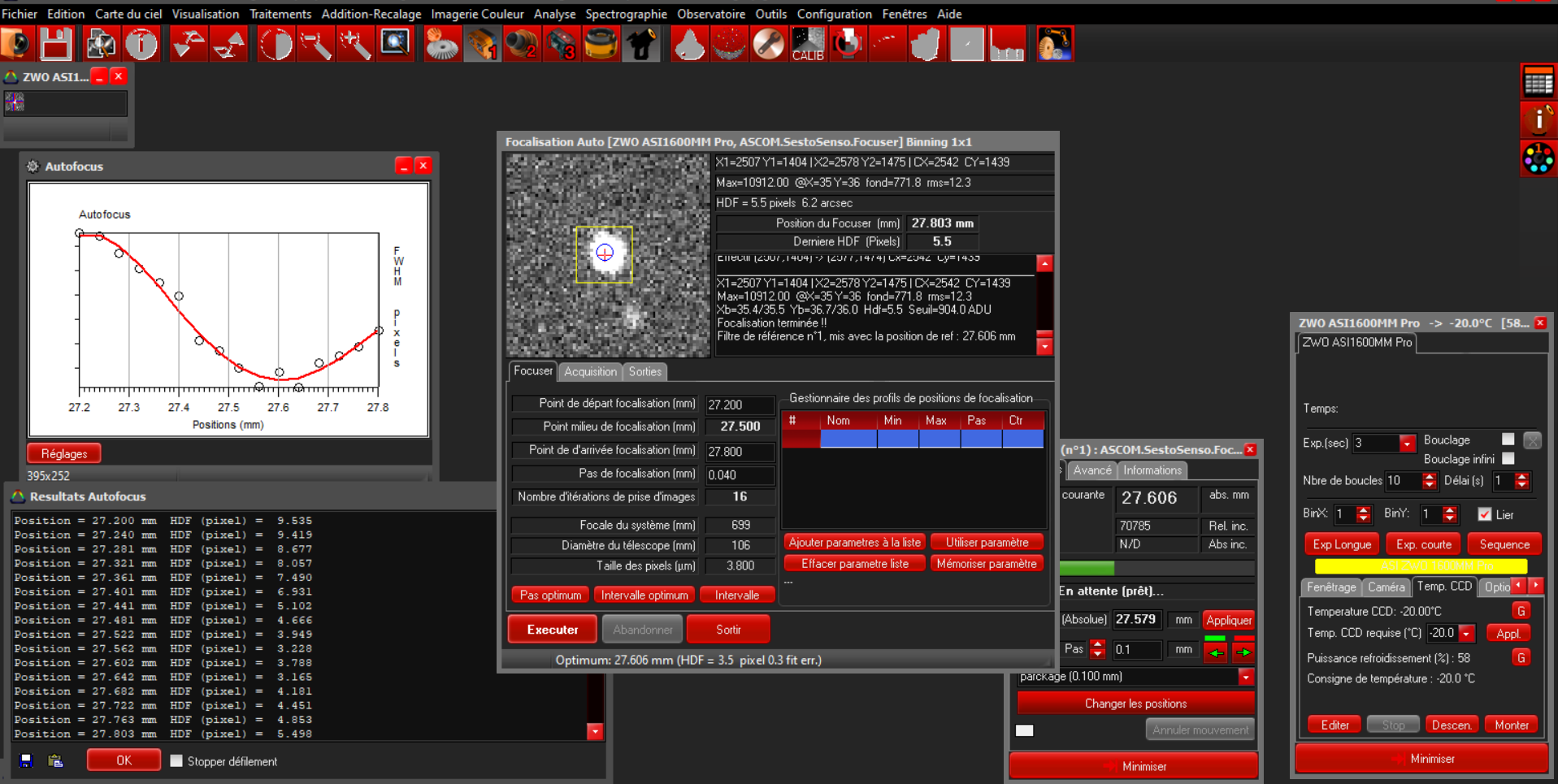
la Mise Au Point :
A l''aide d'un masque de bathinov on peut réaliser la map sans trop de difficulté en grossissant au maximum sous ASICAP
cette fonction intégrée dans prims V10 vous permet de mieux positionner votre capteur et d'avoir une map parfaite au centième de mm.
lien de la vidéo : la fonction collimation
elle demande au préalable de faire une mise au point succincte pour que le système puisse affiner cette MAP automatiquement
elle vous demandera de choisir une étoile pas trop lumineuse (mg 8 ou 9 )et de rentrer plusieurs paramètres: le début et la fin de positionnement du PO et enfin le pas d’incrémentation du PO. vous ne pourrez que réaliser qu'une trentaine d’incrémentations
le logiciel positionne le PO au début du de la position indiquée , prend une photo , calcul le diamètre de l'étoile puis ensuite répète x fois cette séquence jusqu’à la dernière position pour obtenir une courbe FWHM .
c'est aussi simple que cela . vous n'avez plus qu'a mettre votre PO à la position indiquée par le logiciel pour obtenir la meilleure MAP.
si la turbulence est trop importante , il est fort probable que l'étoile repère sorte du champs comme ce fut mon cas cette soirée là. ![]()
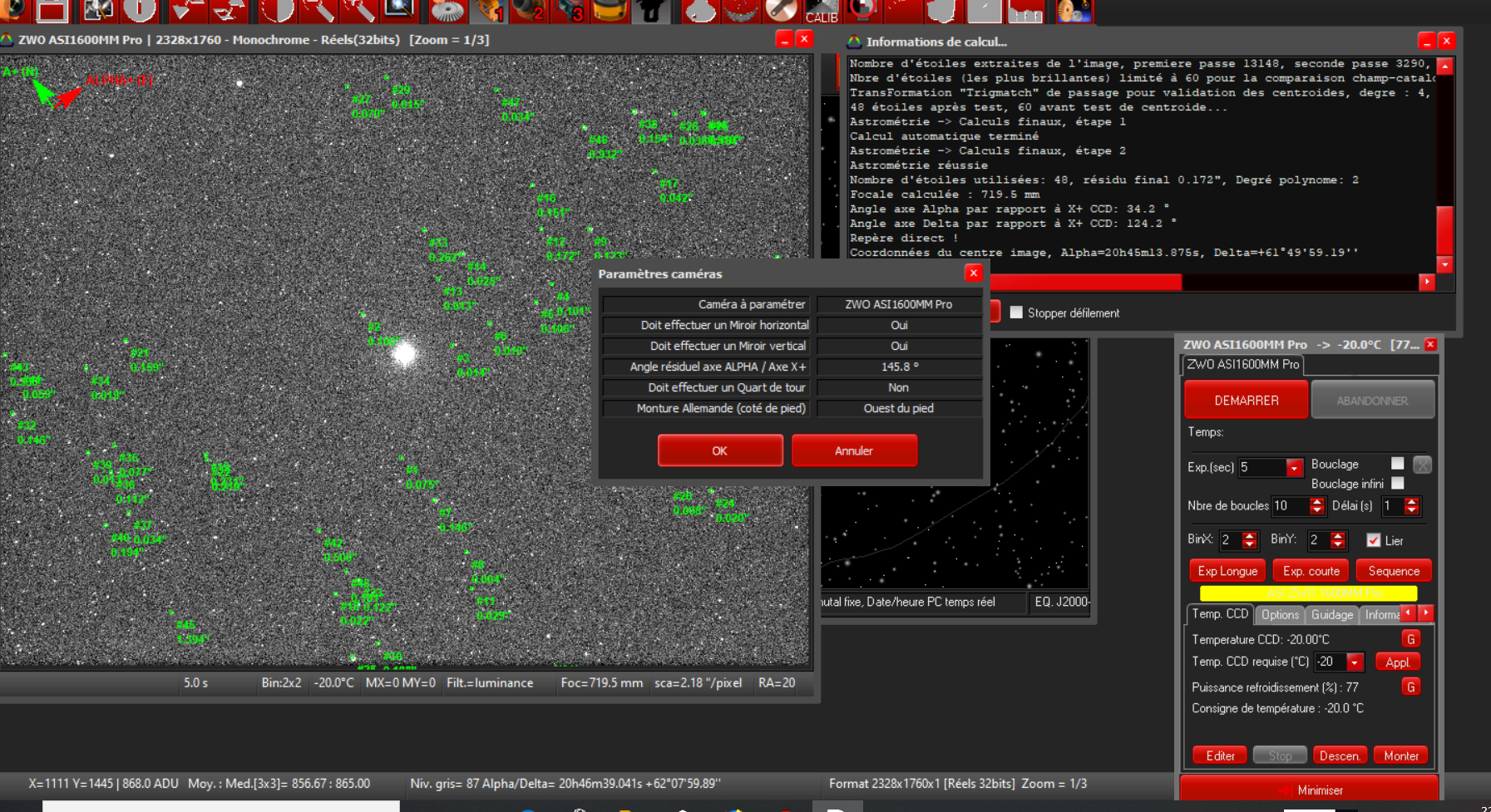
- le positionnement de la caméra :
rien de plus désagréable de ne pas connaitre le positionnement de votre capteur .
même en prenant une photo , il n'est pas toujours simple de se repérer sans avoir des points de repères (étoiles, groupement d'étoiles, galaxies,etc...).
vous pouvez utiliser un rotateur mais le prix est vite dissuasif et la backfocus ne vous permet pas toujours d'en ajouter un
le logiciel Prism V10 vous permet de positionner virtuellement votre capteur sur la map.
vous devrez pour cela réaliser une astrométrie pour connaitre les vecteurs de directions de votre monture, ensuite effectuer un recalage "orientation de la camera CCD" puis refaire un étalonnage automatique.
le résultat est à la hauteur de nos attente en moins de 5 mn.
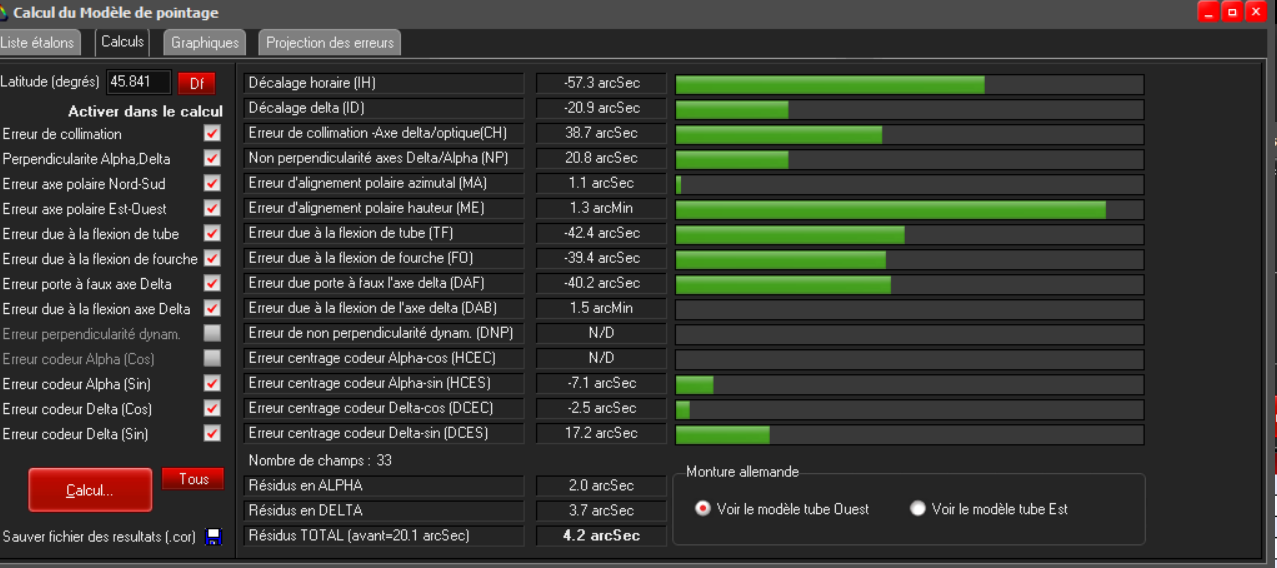
le modèle de pointage :
effectuer un alignement sur 3 étoiles permet à la monture de se référencer dans le ciel mais ce n'est pas suffisant pour réaliser de l'astrophotographie.
certaines montures comme ma 10 microns permettent de le faire sur plusieurs dizaines d'étoiles.
ce logiciel va plus loin . il ne va plus le faire sur 10 ou 80 étoiles mais sur des milliers. oui vous avez bien lu..sur des milliers d'étoiles et sur la plus part des montures du commerce !
le principe est assez simple : il vous demande le nombre de champs à photographier et le nombre d'étoiles à mesurer par champs . il permet ainsi d'avoir une meilleur précision de positionnement dans l'espace
dans les anciennes version il fallait réaliser deux cartographie : EST et OUEST . depuis la dernier version 10.3.57 cela se fait sur tout le ciel.
le calcul demande entre 30mn à 1heure de calculs suivant les montures . à la fin de cette opération , vous obtenez un fichier ou "modèle de pointage" qui vous servira de référence.
il est aussi possible d'apprendre à la monture de connaitre et de se repérer dans avec ce modèle de pointage . Pour cela la fonction "apprentissage" devra être validée.
la différence :
- l'un utilise un fichier de référence par le logiciel lorsqu'il est connecté à la monture .
- l'autre donne les points de références à la monture pour se repérer et les mémoriser...très pratique quand on est en poste fixe
NT : si vous déplacez votre monture , vous devrez impérativement refaire ce modèle ! .

ce modèle est aussi très utile pour connaitre les erreurs induites par votre set up .
vous pourrez donc y remédier en améliorant votre stabilité , votre erreur d'orthogonalité , sur le positionnement par rapport à l'axe polaire ,etc...
comme vous pouvez le constater j'ai diviser par 5 mon erreur résiduelle pour terminer avec une erreur de 4,2 arcsec
-
 1
1
0 Commentaire
Commentaires recommandés
Il n’y a aucun commentaire à afficher.
Créer un compte ou se connecter pour commenter
Vous devez être membre afin de pouvoir déposer un commentaire
Créer un compte
Créez un compte sur notre communauté. C’est facile !
Créer un nouveau compteSe connecter
Vous avez déjà un compte ? Connectez-vous ici.
Connectez-vous maintenant