

ASI 1600 mm pro

la caméra ASI 1600mm pro de la marque ZWO est l'une des plus connue dans sa catégorie .
d’autres sont venues lui faire concurrence voir la dépasser .....mais le but étant bien sur de se faire plaisir en obtenant de magnifiques images du ciel étoilés
elle est encore très bien cotée et elle répondra largement à vos attentes comme c'est le cas pour moi
en astronomie on utilise bien des termes qui restent parfois incompréhensibles pour le commun des mortels
vous trouverez ci joint un descriptif des différents termes et un lien tres complet sur les caméra CCD
https://docplayer.fr/54663467-Choisir-sa-camera-ccd.html
l'ADU (acronyme de Analog Digital Unit) est le pas codeur du convertisseur Analogique-Numérique d'une caméra.
chaque pixel est représenté par un nombre entier (ou trois si on est en couleur), et ce nombre représentatif c'est l'ADU.
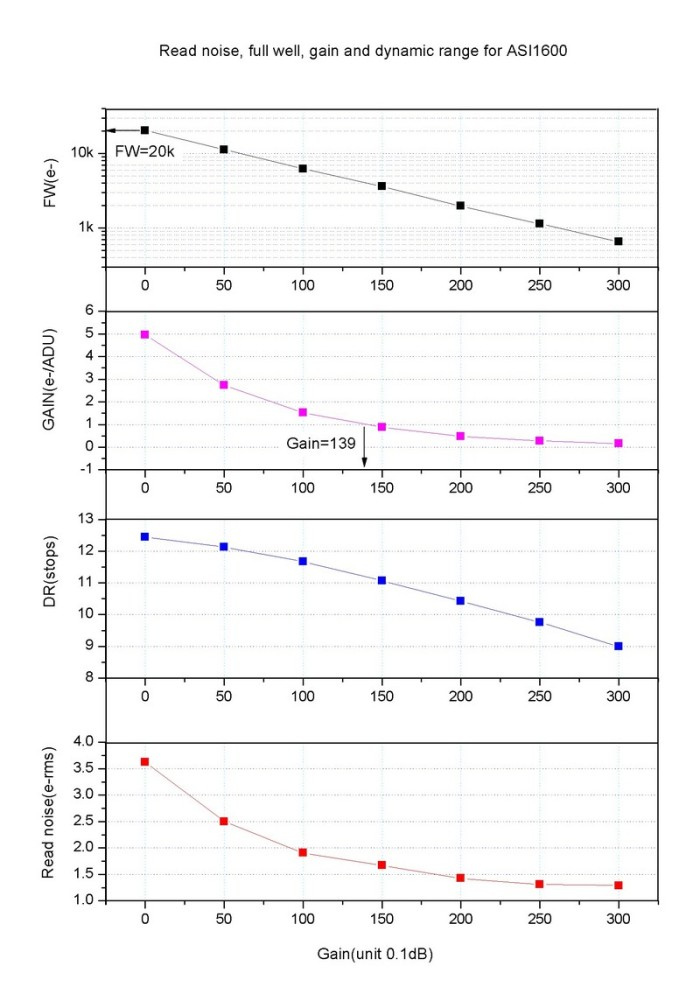
le FullWhell ou capacité de charge correspond au nombre d'électron que le pixel peu emmagasiner sur une pose . son maximum est de 20000e- dans le cas de ce capteur avant sa saturation.
le Gain : il correspond à la sensibilité de la caméra. comme on peut le voir et vous l'aurez vite compris plus on augmente le gain ; plus ce FW diminue et plus vite les pixels se saturent
le binning logiciel (et non hardware ) sur cette caméra consiste à accumuler la lumière (ou signal) des pixels adjacents joints deux par deux . binning de 2 = 4 pixels, binning de 3 =9 pixels, ect.
On obtient ainsi une meilleure détection des objets faibles et étendue mais au prix d'une diminution de la résolution et un changement de l'échantillonnage
le bruit de lecture est un parasite qui diminue avec l'augmentation du gain et par différents moyens il sera enlevé en élaborant des DOF
la dynamique est le fullwhell (nombre max possible d'électrons dans un pixel) divisé par le bruit de lecture en électrons rms.
le vignettage correspond l'assombrissement de la périphérie (coins sombres) d'une photographie.
le backfocus est la distance requise entre la sortie de votre tube et le capteur de votre caméra pour avoir une image nette. sans cela votre image sera trouble voir noire
l'offset permet de caler le point le plus noir par rapport au zéro. c'est très utile pour enlever des pixels seuillés à zéro ( ça donne des pixels noirs sur votre image)
DOF : abregé Dark , Offset , Flat
le QE c'est le rendement quantique
l'échantillonnage représente la portion angulaire du ciel vu par un pixel . il se calcule ainsi E= 206P / F
pour comprendre ce qu'est l'échantillonnage , je vous conseille d'aller consulter le lien suivant
ce lien vous permet d'avoir ce résultat très simplement en fonction du Seeing
https://astronomy.tools/calculators/ccd_suitability
le seeing mesure la turbulence atmosphérique.
https://www.meteoblue.com/fr/meteo/outdoorsports/seeing/tournefeuille_france_2972237
vous comprendrez vite que la taille de votre pixel sera déterminant dans le choix de votre caméra en fonction du tube et du seeing
http://astro.dialou.fr/techniques/astrophotographie/echantillonnage/
ce n'est pas les descriptif le plus complet mais à mon sens le mieux détaillé.
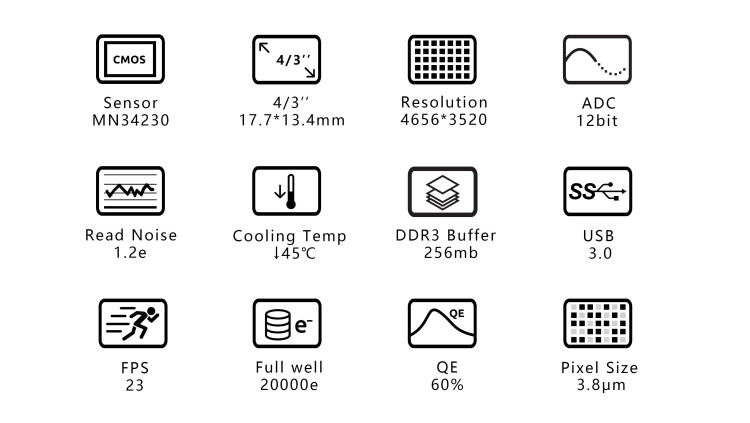
elle possède les caractéristiques suivantes :
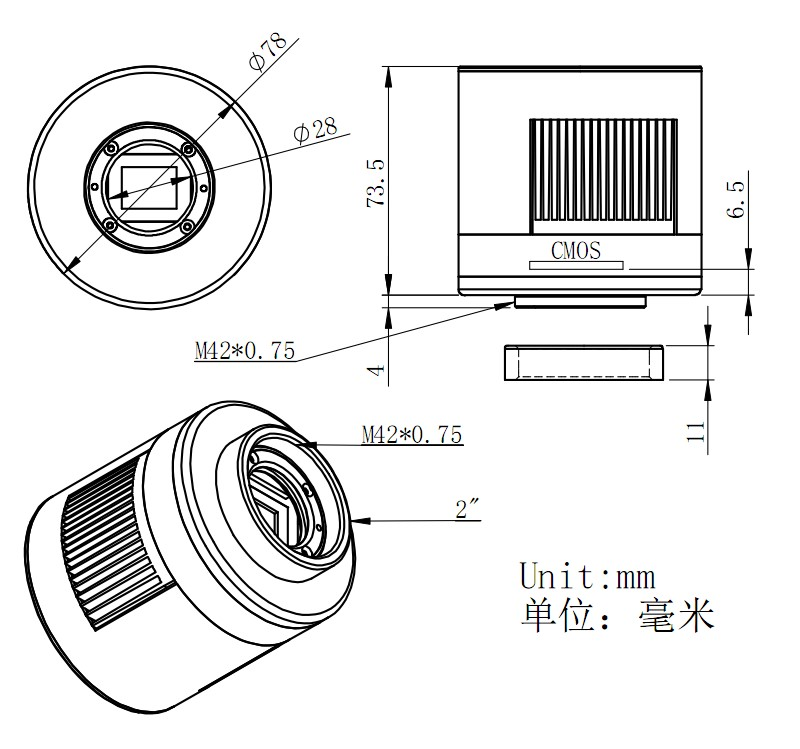
Largeur : 86 mm
Diamètre : 78 mm
Type de capteur : CMOS - 12 bit Monochrome
Taille du capteur : 17,7 mm x 13,4 mm (diagonale 22,2 mm)
Nombre de pixels : 4656 x 3520 pixels
Taille des pixels : 3,8 µm x 3,8 µm
Capteur : CMOS N&B - 4/3" - Panasonic MN34230
Nombre d'images par seconde : Jusqu'à 192 images / seconde en résolution 320 x 240 pixels
Autoguidage : non disponible
Connexion : soit USB 3.0 et USB 2.0
Conversion A/D : 12 bit / 10 bit
Refroidissement : double étage TEC à -45°C sous la température ambiante.
Poids : 410 g
Coulant : 50,8 mm et 31,75 mm (2" et 1,25") / T2 (M42 x 0,75)
Câble USB : USB 3.0 longueur 2 m
Temps de pose minimal : 0,000032 seconde
Temps de pose maximal : 16 minutes
Bruit de lecture : 1.2e à un gain de 30db
Alimentation Requise : 12V - 5A
Rendement Quantique : ~60%
BackFocus (distance Châssis - Capteur CCD) : 17,5 mm (vissant T2) , 15mm ( coulant 2 pouces )
elle est livré avec différents raccords en M42 ou M48 qui permettront de la raccorder ou de l’insérer dans le porte oculaire de votre tube .
vu la diagonale du capteur ces raccords sont largement suffisants pour ne pas provoquer de vignetage
si vignetage il devrait y avoir , attendez vous plus a ce qu'il vienne de votre applanisseur ou correcteur. ![]()

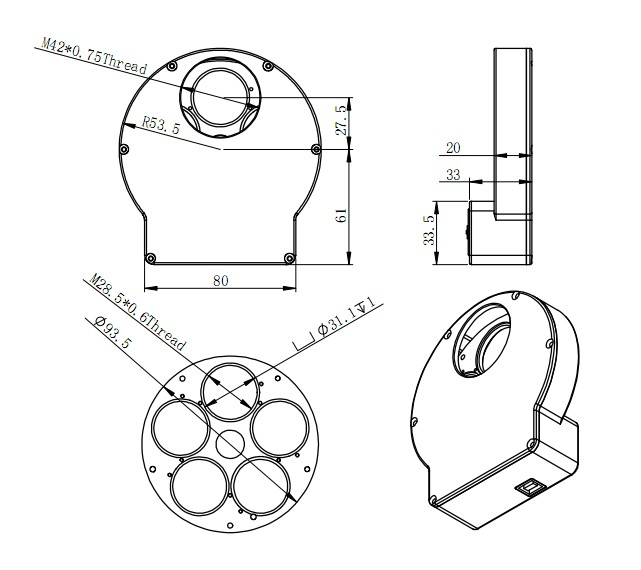
pour obtenir de la couleur et faire ressortir les nébuleuses ,vous devrez vous doter d'une roue à filtre avec ces 7 filtres LRVB SHO soit en 31,5mm ou en 36mm
vous pouvez pour des raisons budgétaires , vous limitez aux LRVB 31,5mm ce qui est déjà suffisant pour débuter.
certains vendeurs vous font même des packages au cout d'achat très compétitif.
désignation des filtres :
L = luminance
R= rouge
V= vert
B= bleu
S = souffre
H= hydrogène
O = oxygène
conseil de ZWO : miroir coté capteur, reflet interne coté ciel pour ce capteur pour ne pas avoir de halo
cette roue à filtre devra être installée au plus prêt de votre caméra pour éviter le vignettage
quand au calcul du diamètre du filtre , cela dépend évidemment de la distance de celui ci par rapport au capteur . plus le filtre est loin du capteur plus il devra être important
lien très intéressant pour le calculer
https://astronomy.tools/calculators/ccd_filter_size
lien sur l'utilisation des filtres à bandes étroites
http://www.ciel-astro-ccd.fr.nf/dossiers/filtres_ba_et.pdf
un des points important sera de respecter le backfocus entre votre caméra et votre applanisseur/correcteur .
dans mon cas, l'applanisseur donne un BF de 57mm + ou - 4mm en sortie
sachant que le BF de la caméra est de 6,5mm + l’épaisseur de la RAF est de 20mm , il vous faudra mettre 30,5mm de raccord .
dans le calcul du BF vous devez aussi tenir compte de l’épaisseur des filtres (1,9 mm)
vous pouvez aussi vous doter d'une bague de tilt pour corriger l'inclinaison du capteur CMOS par rapport au chemin optique.
https://www.loisirsplaisirs.com/zwo/3786-bague-de-tilt-t2-zwo.html
le capteur CMOS n'est jamais réglé d'usine sur son support pour être parfaitement à l'horizontale du Circuit Intégré.
les étoiles sur les bords sont souvent allongées dans un coin. ce correcteur permet ainsi de bien remettre à la verticale le capteur par rapport au chemin optique
il est préconisé comme réglage par défaut de mettre le gain à 139 db pour avoir 1e- par ADU
le bruit de lecture chute ainsi fortement pour obtenir 1,5e- et la dynamique reste assez bonne pour la plupart des cibles faibles . le FW est donc de 4000e-, soit l'équivalent d'un codage sur 12 bits.
certains préconisent ces valeurs suivantes suivant ce que l'on recherche à faire
with a 150mm aperture at f/4 :
Optimal SNR: Gain 75/Offset 15, 480-600s
Balanced SNR/Resolution: Gain 139/Offset 30, 210s
High Detail/Resolution: Gain 200/Offset 60, 90s
Alcor-system avait pratiqué ce test mais sur un capteur couleur
http://www.alcor-system.com/common/allSky/tests/TEST_ASI_1600MM_COOLED_CCA_ALCOR-SYSTEM.pdf
pour la faire fonctionner , il sera nécessaire d'installer les logiciels du fabricant ZWO
https://astronomy-imaging-camera.com/software-drivers
le logiciel ASICAP
et les drivers ASCOM de la caméra et de la RAF (EFW)
cette caméra est aussi compatible avec d'autre logiciels
FireCapture V2.6 and Up [32bit/64bit] ( Native Support, FREE ) celui que j'utilise pour le planétaire
SharpCap V3.0 and Up ( Native Support, FREE ) celui que j'utilise pour le visuel assité
Genika ( Native Support)
PRISM ( Native Support) : celui que j'utilise pour le ciel profond
Planetary-imager( Native Support, FREE )
il vous faudra aussi lors de son utilisation réaliser la MAP pour respecter le Back Focus. pour cela vous devrez utiliser un masque de bahtinov ou un moteur de mise au point
vous pouvez aussi le fabriquer au dimension requises de votre appareil
http://oeilducelestron8.canalblog.com/archives/2011/12/06/23668031.html
vous verrez que vos photos sont toujours parasitées . il est donc impératif de faire des DOF pour enlever ces défauts
cette vidéo est très explicative :
lien des différents bruits et du traitement de ceux ci:
https://docplayer.fr/42837933-Test-camera-asi-zwo-1600mm-cooled.html
https://media.afastronomie.fr/RCE/PresentationsRCE2018/Walliang-RCE2018.pdf
quand à l'option de la résistance chauffante qui s'adapte sur ces caméras au contraire de certains je la préconise car j'ai déjà été confronté à avoir du givre sur l'applanisseur
https://www.loisirsplaisirs.com/zwo/3856-systeme-anti-buee-zwo-pour-asi-refroidie.html
2 Commentaires
Commentaires recommandés
Créer un compte ou se connecter pour commenter
Vous devez être membre afin de pouvoir déposer un commentaire
Créer un compte
Créez un compte sur notre communauté. C’est facile !
Créer un nouveau compteSe connecter
Vous avez déjà un compte ? Connectez-vous ici.
Connectez-vous maintenant