

l'applicatif UNITY de chez PEGASUS Astro

l'applicatif UNITY de la société Pegasus nouvellement sortie sur le marché vient remplacer l'antique applicatif qui m'a donné une entière satisfaction depuis ces 3 dernières années avant de passer chez un autre concurrent :l'Eagle 4S de Primaluce
il reprend le concept ; les routines et concentre en un seul lieu l'ensemble des équipements à configurer (de chez pegasus ).
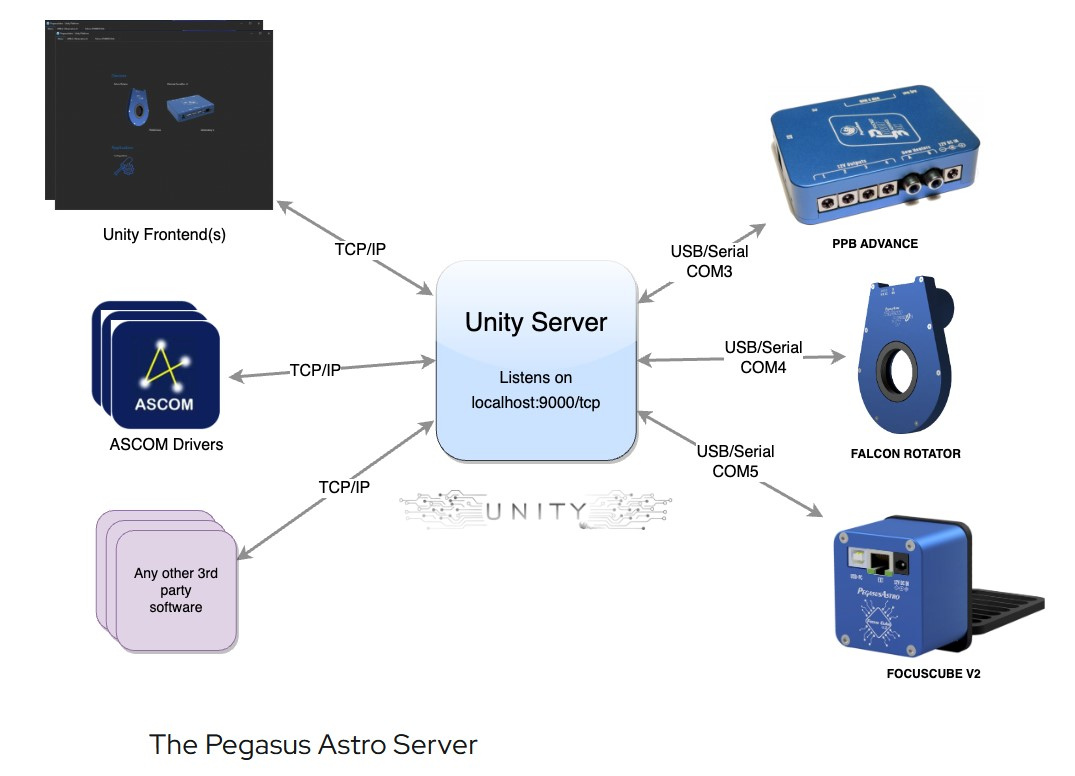
la véritable évolution de cet applicatif réside dans sa façon de comporter comme un " serveur" et d'apporter tous les drivers nécessaires au fonctionnement de la plateforme ASCOM .
vous comprendrez plus facilement quand j'aborderais la gestion de mon moteur de mise au point Moonlite. ![]()
il permet de gérer presque ou tout matériels astronomiques raccordés aux Ultimat Pegasus V1 et V2 (UPBv2) et sur le Pocket Powerbox Advance
ce logiciel gratuit est téléchargeable sur ce lien et la documentation est disponible à cet endroit doc
il est ainsi plus simple pour l'astram de gérer l'ensemble des équipements raccordés sur cette powerbox mais aussi l’ensemble des alimentations 12V et des résistances chauffantes .
j'ai déjà abordé ce matériel dans une autre publication prise en main du Boîtier Ultimate Powerbox V.2 Pegasus Astro - PEG-UPBv2 .
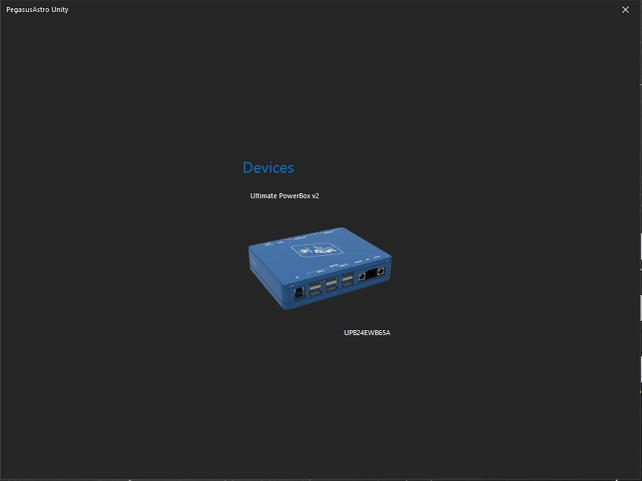
au lancement de UNITY vous arrivez sur une interface recensant l'ensemble des équipements de chez Pegasus connecté sur celui ci.
ce n'est pas le seul à mettre en avant son matériel . la faute à qui ..devinez ?
Nota : si votre rotateur n'apparaît pas c'est qu'il n'est pas correctement raccordé .

- le premier module "UPBV2" permet de gérer l'ensemble de l'Ultimate (port USB, moteur , alimentations et résistances chauffantes)
- les modules propres aux équipements permettent de les configurer individuellement
et enfin le dernier module "configuration" permet lui de gérer et mettre à jour l'applicatif
il vous suffit alors de cliquer sur le module concerné pour avoir les paramètres désirés.
L'UPBV2 possède deux écrans et 6 onglets dont trois sont informationnels . on va s’intéresser aux trois premiers
- l’onglet principal récapitulant les données électriques , thermiques , hydro et des onglets d'informations

- un onglet de contrôle des différents ports
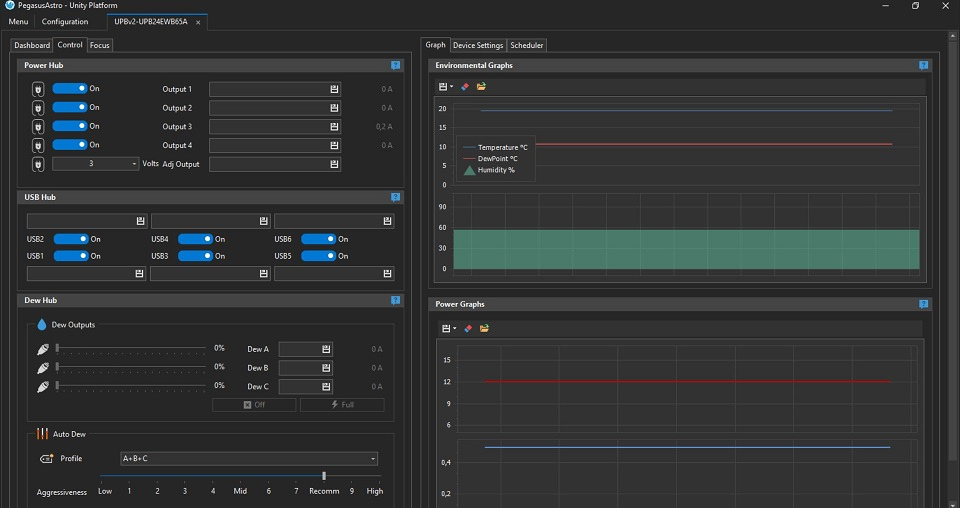
et un onglet pour gérer le moteur de mise au point série sans contrôleur . c'est celui ci qui va m’intéresser pour gérer mon moteur Moonlite .![]()
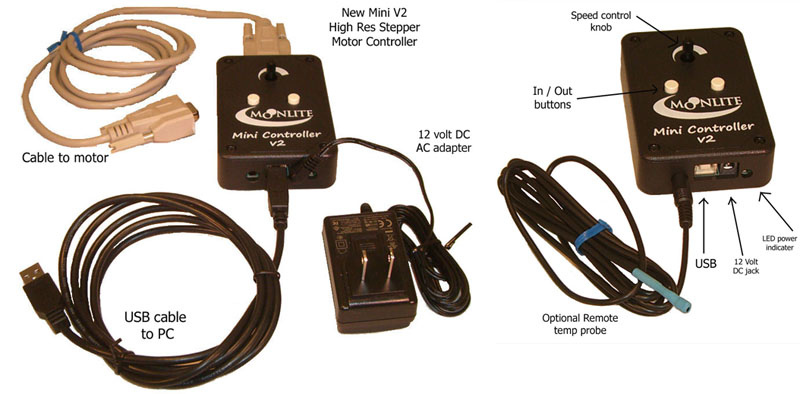
ce moteur de mise au point est géré par un port série ....chose qui a été remplacé depuis par un port USB2.0 avec un contrôleur interne.
là dans notre cas , c'est l'UPBV2 qui fera office de contrôleur et le câble série remplacera l'USB2.0.
on peu si on le désire acheter la raquette de gestion propriétaire qui comporte un contrôleur mais cela encombre vite le setup et rajoute du poids (350gr).
si j'ai préféré cette solution au tout début c'est plus par méconnaissance.
d'autant que l'applicatif constructeur est très basique et la raquette est plutôt dédiée à l'observation visuelle .
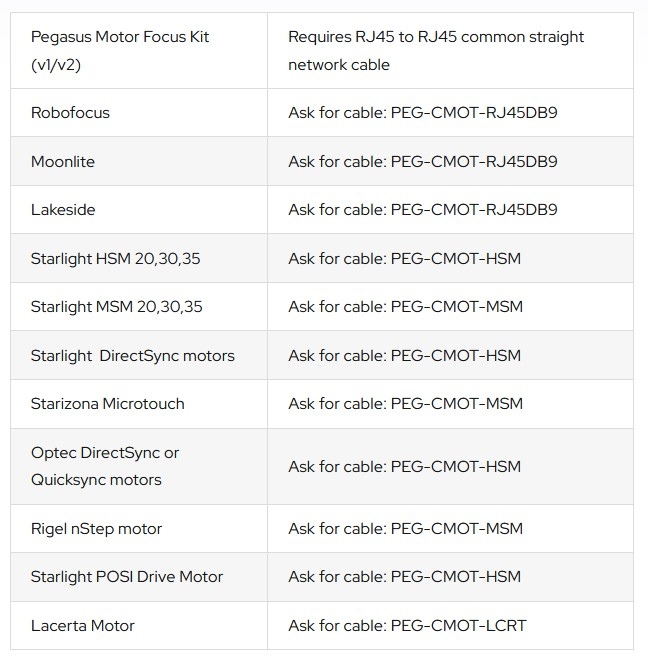
une attention particulière sera faite sur le choix du câble série car il en existe plusieurs
voici la liste :
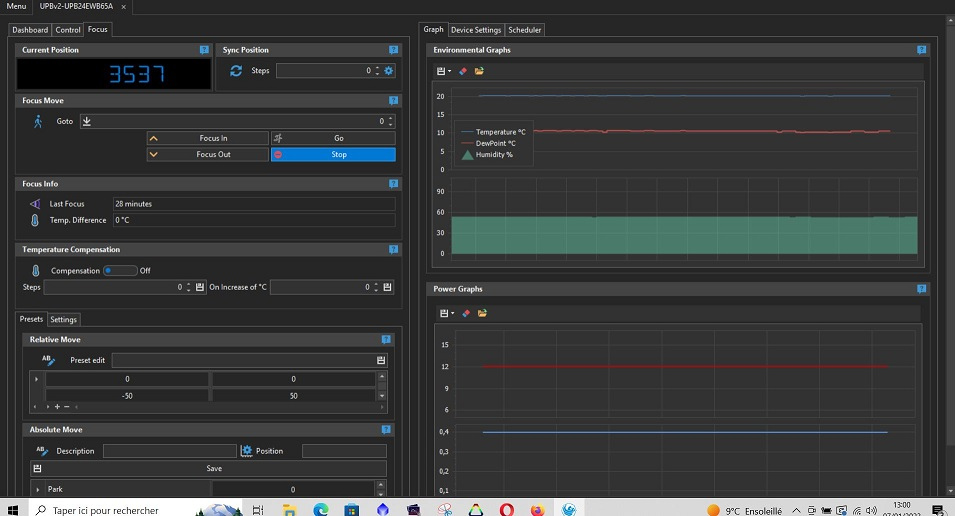
le dernier onglet est composé de 4 modules de gestions
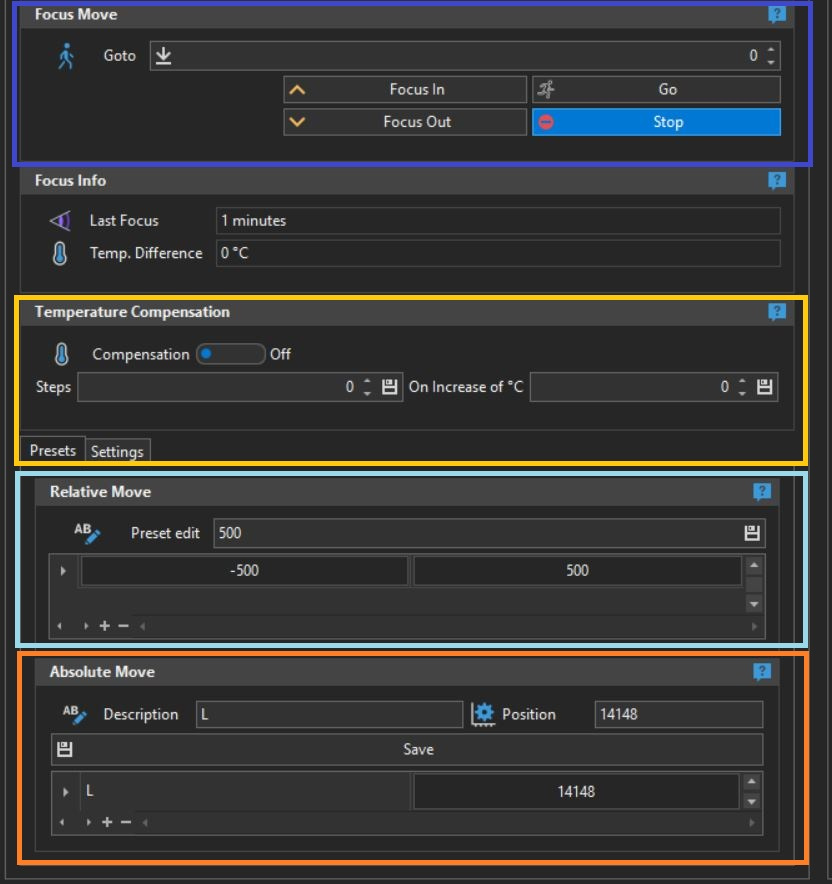
- en bleu foncé : le module pour gérer manuellement le moteur de mise au point
- en jaune : le module gérant la compensation de positionnement en fonction de la température ambiante
- en bleu ciel : le module déterminant les pas de déplacements
- en orange : le module déterminant les positions précises de vos prise de vues
celui qui sera très important se trouve être le "settings"
c'est à cet endroit que vous devrez paramétrer les éléments de configuration de votre moteur de mise au point
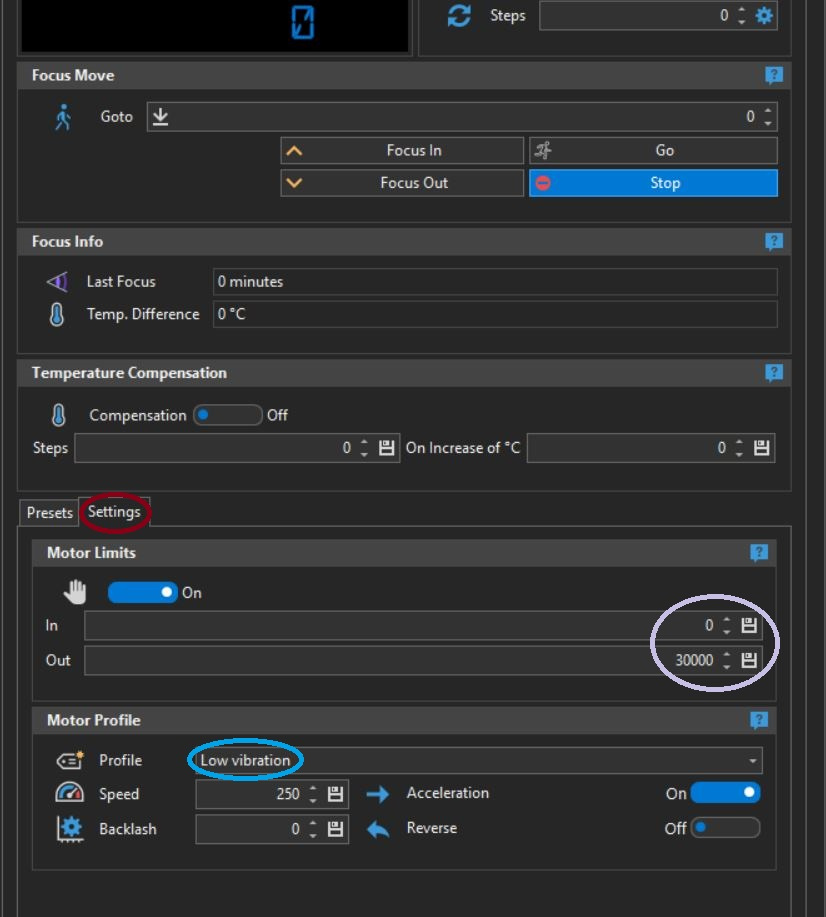
En fonction des données constructeur vous devrez mettre les paramètres limites de fonctionnement , le pas et choisir le modèle de moteur . dans mon cas c'est un focuslynx de chez moonlite.
A partir de là votre moteur de mise au point est configuré. il ne vous reste plus qu'a initialiser votre logiciel Prims et à choisir les équipements de votre setup.
c'est la que rentre en jeu le mode serveur et auquel il faudra porter une attention particulière aux choix des drivers des équipements
avant l'arrivé du nouvel applicatif UNITY je devais au préalable installer les drivers ascom puis j'allais choisir le driver spécifique du constructeur
là il vous suffira de choisir les drivers nommés "Ascom.PegasusAstro" propres à Pegasus
si vous aviez au préalable installé l'ancien applicatif , vous devriez voir apparaitre deux drivers pour le même matériel : le "flacon rotator" pour l'ancien applicatif et le nouveau "Ascom pegasusAstroFalcon rotator" pour l'UNITY.
pour mon moteur Moonlite il vous faut prendre le "PegasusAstro UPBv2 "puisque la gestion se fait par le contrôleur de Ultima Powerbox V2 de Pegasus
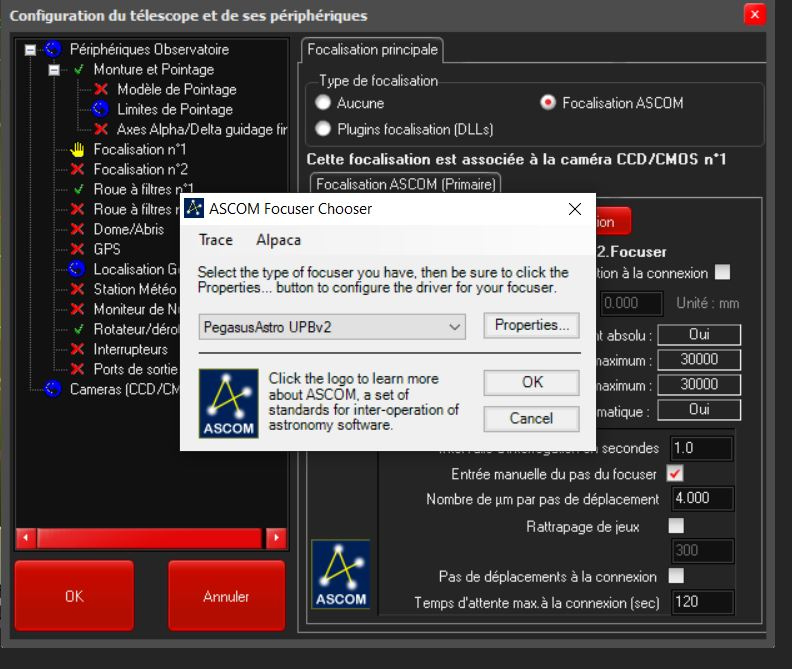
cliquer sur l’icône associée et c'est tout
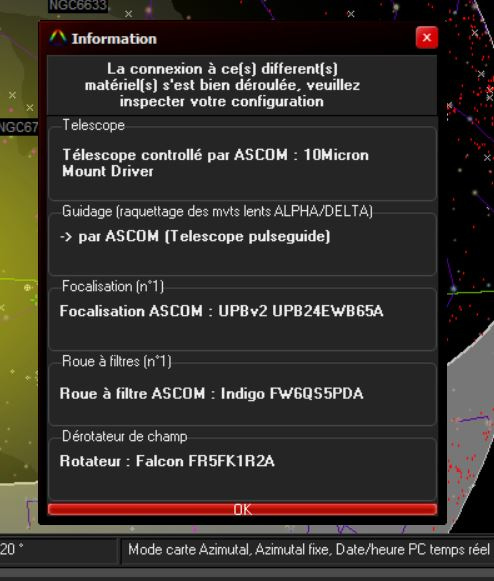
assurez vous aussi que les données inscrites dans la configuration de Prims soient les bonnes
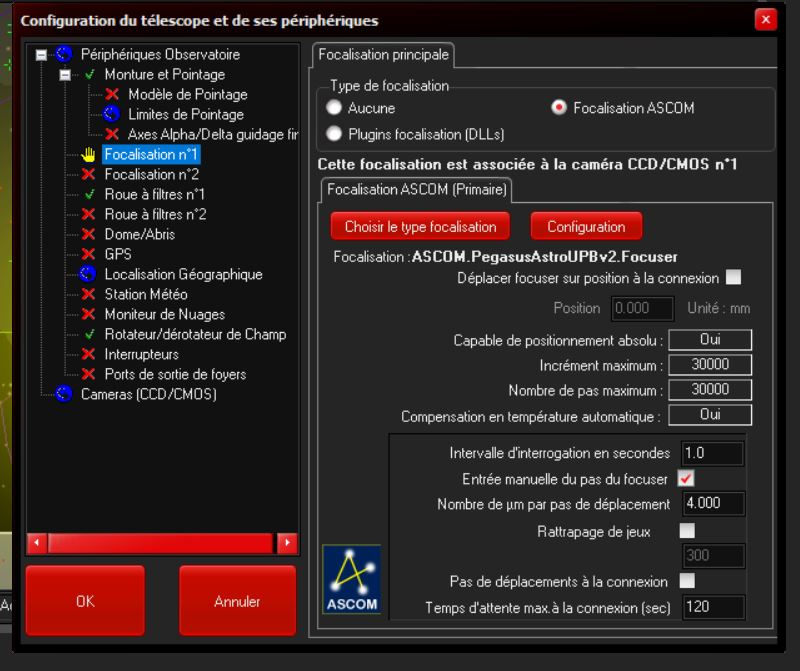
il vous suffit alors de lancer "connect telescope" pour commencer vos prises de vues
vous rajoutez un Planiciel , un mode d'acquisition et vous vous retrouvez avec un applicatif concurrent à Play .![]()
bon ciel
Christophe
0 Commentaire
Commentaires recommandés
Il n’y a aucun commentaire à afficher.
Créer un compte ou se connecter pour commenter
Vous devez être membre afin de pouvoir déposer un commentaire
Créer un compte
Créez un compte sur notre communauté. C’est facile !
Créer un nouveau compteSe connecter
Vous avez déjà un compte ? Connectez-vous ici.
Connectez-vous maintenant