
Monture prototype, la motorisation direct drive est en bas à gauche au bout de l'axe.
Motivations :
L'usage des roues et des vis est :
La motorisation direct drive annule tous ces défauts car elle emploie des moteurs sans contact directement placés sur l'axe Alpha ou Delta couplé à des codeurs de position tres précis (0.015 arcsec par pas). Le tout est piloté par une boucle fermée fonctionnant jusqu' à 10 Khz (possibilité de récuperer les vibrations dues au vent)..Cette technologie est employée dans tous les telescopes professionnels.
L'idée est de migrer vers cette solution sans se retrouver avec des couts exhorbitants.
De nos jours, c'est une solution possible pour l'amateur dans la mesure où les couts ont baissé et cette technologie est dorénavant implanté sur certaines montures amateur : ASA, Planevawe ....
Un demonstrateur permettant d'évaluer les problèmes et la facon de faire fonctionner ce système est montré sur cette page web.
L'intégration a été faite dans une VMA-200 modifiée. Seul l'axe Alpha a été modifié, l'axe delta a été conservé avec un systeme roue-vis. Comme je demarrais de zéro sur cette technologie et que j'avais à l'époque une compétence assez théorique, ce prototype m'a donné l'occasion d'apprendre beaucoup de choses même sur un seul axe.
Valmeca a réalisé la modification de cette monture.
Pour le moment cette monture n'a pas de freins, mais cela est prévu. C'est une fonctionnalité dont nous avons étudié les aspects et qui ne pose pas de problèmes à intégrer sur cette monture (ou une autre). Un frein de type desserré lorsqu'un courant passe dans un bobinage est facile à implementer.
Monture prototype, la motorisation direct drive est en bas à gauche au bout de l'axe.

Stator (à droite) et rotor du moteur (à gauche), les deux anneaux sont imbriqués et montés directement dans l'axe Alpha ou Delta, le moteur fait 210 mm de diamètre et offre un couple élevé
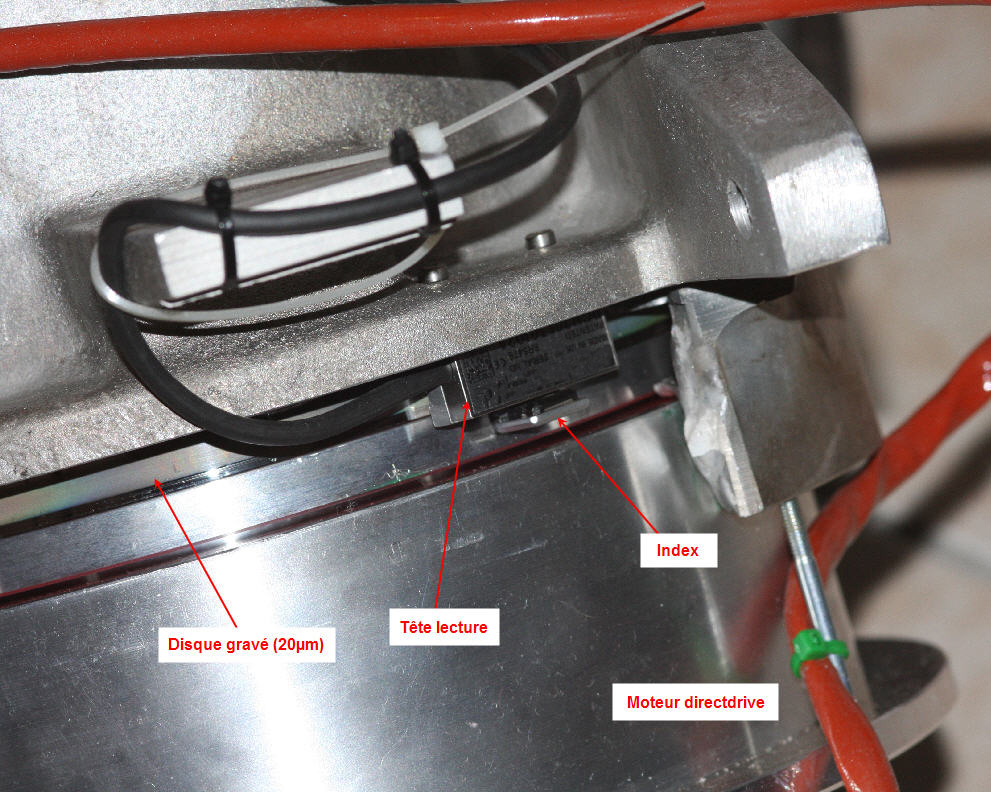
Vue du codeur et de la tête de lecture, il est trés precis.
Comme l'axe alpha possède un codeur dont la resolution est d'environ 0.02 arcsec par pas (presque 63 millions de pas par tour), et qu'il s'agit d'un systeme en boucle fermée, il est tout à fait possible de faire des tests en intérieur et sans étoiles. Cela est pratique compte tenu du fait que le beau temps est assez rare de par chez moi. Cela permet aussi le réglage des parametres de PID du controlleur qui gère le codeur et le moteur.
La lecture directe du codeur donne la performance de suivi du systeme.
Sur la courbe ci dessous, l'erreur RMS de suivi est de 0.05 arcsec, et sans aucune erreur périodique.Cela est trés bon et très prometteur.
Néanmoins, il faut réaliser des tests sur le ciel, qui sera le juge de paix.

Le 04 Fevrier 2010 un premier test sur le ciel a été effectué.
La régularité du suivi a été mesurée avec une camera DMK41AU (pixels de 4.65µm) au foyer d'un intes Ø180mm et de 1800 mm de focale.
L'echelle est de 0.53" par pixel, échelle qui permet de bien voir les défauts.
La mise en station doit être soignée... Il faut éviter tout déplacement des optiques
et lutter contre les flexions.
Il faut garder à l'esprit que le codeur est relativement eloigné (en bas de l'axe alpha) du télescope.
Il peut se passer "des choses" entre le codeur alpha et le plan focal.
Voici la première courbe avec 3 mesures par seconde sur 10 minutes :

L'echelle en Y est exprimé en arcsec, et ne montre pas sur 10 minutes la moindre erreur périodique.
L'étoile etait à l'équateur céleste et le vent était de l'ordre de 10km/h. La courbe est bruitée par le mouvement tip tilt de l'étoile du à la turbulence, la pose etait de 1/400s par point.
Le bruit de +/- 1" est du à la turbulence (effet tip tilt ou déplacement sur le foyer de l'étoile).
Il est interessant de comparer cette mesure avec un système roue+vis+galet, dont la perfomance est relativement médiocre comparé au systeme DirectDrive.
C'est sans commentaire...

La courbe de l'axe vis-roue est moins bruité grâce à la pose de 2s par point : l'effet de tip tilt de l'etoile est lissé.
La zone jaune montre là où se trouvent 90% des points mesurés avec la monture en directdrive à titre de comparaison.
La nuit (4 Mars 2010) a été, cette fois ci, moins turbulente.
Le suivi a été mesurée avec une camera DMK41AU (pixels de 4.65µm) au foyer d'un intes Ø180mm muni d'une barlow 3x, ce qui donne 5400 mm de focale.
L'echelle est de 0.18" par pixel : c'est un fort grandissement.
Voici un fenetrage sur le centre de la camera, qui montre clairement la tache d'Airy de Arcturus (1/2000s de pose).
Si on clique sur l'image, une video divX à 15 images par seconde vous sera montrée :

La position de la tache d'Airy est mesuré 4 fois par seconde en Alpha (X) et en Delta (Y) :il est possible de montrer les defauts de suivi s'ils existent.
L'interet de mesurer sur l'axe Delta (Y), en meme temps, est de montrer que les oscillations dues à la turbulence sont identiques à celles mesurées en Alpha (X) et que le système directdrive ne produit pas des oscillations parasites sur l'axe Alpha.
La premiere mesure en Alpha montre que l'ecart type des points est de 0.79 arcsec.

La même séquence en Delta montre que cet écart type est de 0.79" aussi, donc les oscillations de l'étoile n'ont pas de direction privilégiée, elles ne sont dues qu'à la turbulence et non à l'entrainement directdrive.

Une analyse spectrale de Fourrier en Alpha permet de voir s'il y a des frequences d'oscillation privilégiées :

On ne voit que du bruit, aucune fréquence semble montrer un pic. Certes on peut parler de pic à 1.06", mais la mesure suivante en Alpha ne le montre plus, ce qui indique un pic de bruit. Il n'y a pas d'oscillations en Alpha dus à la motorisation direct drive.

Si on calcule en Delta (Axe Y), la transformée de fourrier, la même chose est visible : pas de fréquence priviligée, donc les oscillations de l'étoile ne sont dues qu'à de la turbulence et à la statisique de Kolmogorov.

(Toutes ces analyses ont été réalisées avec Prism exclusivement)
Une pose de 180s de pose (sans guidage) et une echelle de 0.53" (une pose de 300s sature la camera à cause de la présence de la Lune !) avec la DMK41 a été réalisée :

Les étoiles sont rondes sur l'axe Alpha (en X)
Dans ce ce qui suit, d'autres tests SANS GUIDAGE ont été réalisé avec une camera SBIG ST-2000 (optimisée pour le ciel profond). Elle possède des pixels de 7.4µm et produit une échelle de 0.89" avec les 1700 mm de focale.
La mise en station a été soigneusement réalisée avec la methode de King (distance au pole de moins d'une minute), le passage des cables optimisé pour eviter qu'ils tirent sur la camera, la vitesse sidérale reglée le mieux possible (731.15 pas/sec) et un bon equilibrage sur l'axe delta.
Il faut garder à l'esprit que la meilleure monture du monde ne pourra rien, contre un tube dont l'optique, ou la fixation de la caméra flechissent ..... J'ai conscience qu'il est difficile de vérifier ces points et peuvent être la limitation du système....
Une fin de nuit avec un seeing entre 2" et 3" s'est presentée. J'ai pointé un champ à l'équateur céleste (Delta ~ 0°), qui represente la zone où les erreurs seront les plus visibles (pas d'atténuation par le cosinus de la déclinaison).
7 poses de 5 minutes (300s) ont été réalisées avec cette camera et ce telescope. Voici un morceau de 4 images du lot (l'axe X est l'axe Alpha, et Y le delta)
Il est situé à
RA=15h30m25s et DEC=+4°00'30" : j'ai pu retrouver les coordonnées du champ automatiquement en scannant cette region du ciel laors que j'avais pointé totalement au "pif".
Les résultats sont plutot bons : les images sont piquées, et l'elongation des étoiles en dessous de 20%
La plus mauvaise est l'image 2 qui presente une elongation de 27% des etoiles sur l'axe delta. La cause du défaut est inconnue.
|
 Image 3 |
 |
 |
 Image 4 |
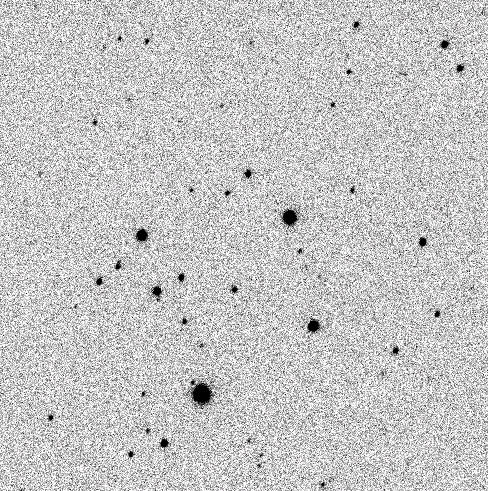 Image 2 |
 |
 |
Si on additionne toute les images, une pose finale de 35 minutes est obtenue et la qualité est tout à fait honorable :


En additionnant la pose n°1 avec la pose n°7 sans recentrage, il est possible de voir le décalage en Alpha et Delta sur 35 minutes :

Ce décalage est de 5.1 pixels en Alpha (4.2" ou 0.12"/min) et de 17.1 pixels en Delta (14.3" ou 0.4"/min).
C'est
sans doute à les effets conjugués d'une mise en station et d'une vitesse sisérale qui ne sont pas parfaites (de 0.013%).
Mais c'est une derive continue et lente, qui n'est pas polluée par un oscillation d'erreur périodique.
Si un modèle de pointage couplé à une correction active des vitesses Alpha et delta aurait été employés, l'erreur pourrait être encore plus faible !
Dans tous les cas, les erreurs périodiques des roues et des vis (dont un palmares exhaustif peut être vu ici) sont completement inexistantes.
Il a été testé une vitesse rapide : 20°/sec , sur la vidéo suivante, on est parti de 4°/sec en allant vers une vitesse de 20°/sec
La consomation du systeme en vitesse sidérale est de l'ordre de 5 à 10W : pas plus.

- A 4°/sec sans le contrepoid de 5 kg, c'est juste pour tester la rigidité du moteur, il est évidement que ce n'est pas là un mode de fonctionnement normal (imaginer ce qui peut se passer si une coupure de courant se produisait). Cette expérience démontre à quel point l'axe et son moteur sont rigides. Regardez bien les flèches rouges, elles indiquent l'absence du contrepoid. La consommation peut monter à plus de 100W dans cette configuration.

NB : Je suis désolé pour les vetements qui sechent à l'arriere plan...
