SpecSlitless
Durante unos meses he estado realizando observaciones con el Spec3K, pero al tener situado el espectroscopio al final del tubo óptico, limitaba mucho los movimientos del telescopio dentro del espacio disponible en el observatorio (mini-observatorio de 85x85 cm de espacio interior).
También resultaba problemático el sistema de seguimiento de la estrella dentro de la rendija del espectroscopio, ya que la imagen de la estrella en observación, aparece distorsionada por la rendija, y el PHD2 no efectuaba correctamente el seguimiento.
Aunque los resultados de las observaciones, han resultado ser bastante buenos, precisaba dar un salto evolutivo en la realización de espectroscopía con equipos pequeños.
En marzo de 2023, Christian Buil publica un documento exponiendo la accesibilidad a la espectrografía con equipos disponibles por la mayoría de astrofotógrafos.
Link al documento: Manifeste pour la spectrographie 2.0
En este documento se presenta la facilidad de utilización de un espectrógrafo sin rendija, aprovechando la calidad de imagen ofrecida por los actuales refractores utilizados para astrofotografía. Este sistema permite hacer el seguimiento mediante un telescopio guía (al igual que en astrofotografía), de esta forma ya no tengo los problemas del seguimiento a través de la cámara guía de la rendija.
En el foro dedicado a la observación solar 'Solar Chat', tienen un apartado a la utilización de espectroheliografos, donde se publicó una nueva construcción con un espectrógrafo situado sobre el tubo de observación (link a la página). La idea me pareció muy interesante, ya que permitía reducir el tamaño del conjunto tubo/espectrógrafo, y de esta forma poder ubicarlo mejor dentro del mini-observatorio.
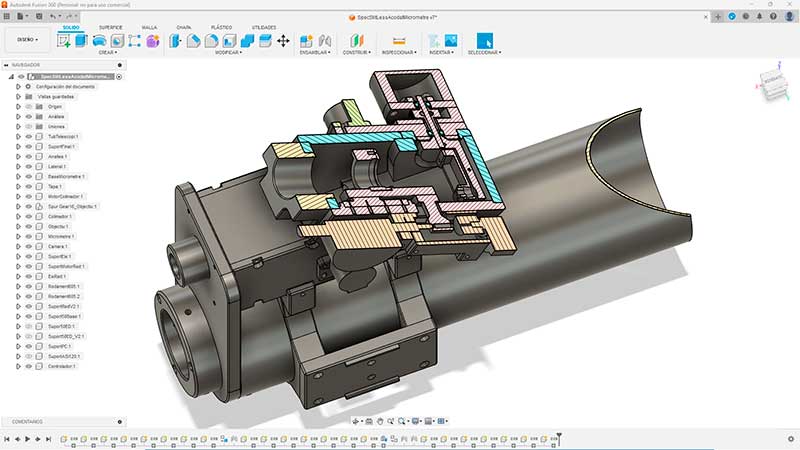
A partir de estos documentos realicé los primeros diseños para construir un nuevo espectrógrafo que no utilizase rendija, y que fuera 'acodado' con el espectroscopio sobre el tubo del telescopio.

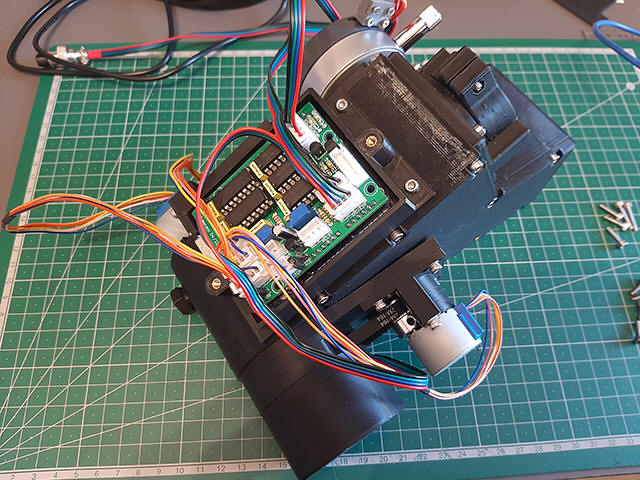
Otra vista del conjunto mostrando los componentes del mecanismo de enfoque y de posicionamiento de la red.
 |
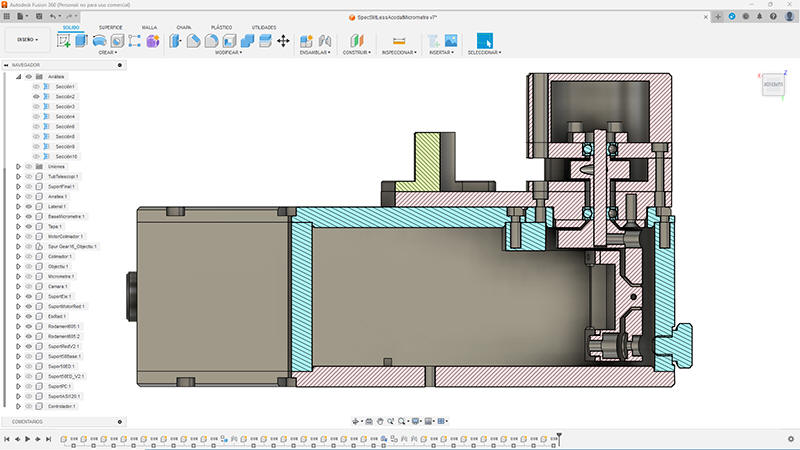
Vista del soporte del objetivo (el motor de movimiento y el micrómetro están
en el exterior). Al fondo puede verse el mecanismo de movimiento del colimador, que se efectúa mediante un engranaje. Las ópticas están montadas sobre guías lineales MGN7, para facilitar el movimiento. |
 |
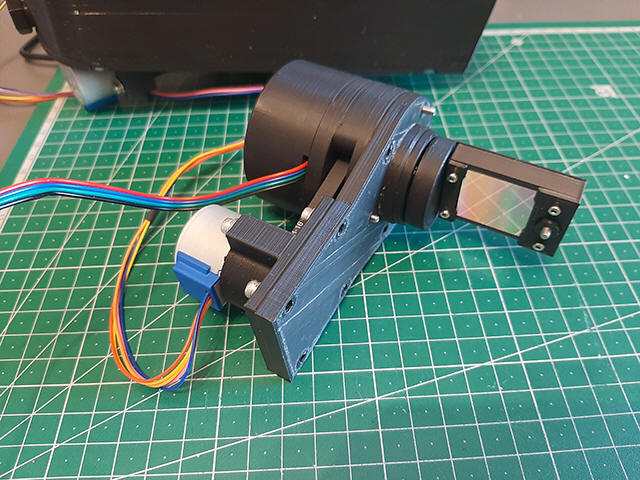
Vista exterior de la base del espectroscopio, donde puede verse el mecanismo
de movimiento del objetivo, con el motor de pasos que acciona un eje roscado
(M3), que impulsa el soporte de la lente objetivo. El micrómetro digital, proporciona suficiente fuerza para mantener la presión sobre el eje y evitar el fatídico 'backlash'. El micrómetro digital dispone de una salida para conectar a un dispositivo externo, aunque no he localizado en el fabricante, ni el conector ni el protocolo, por lo que he diseñado un conector con la impresora 3D, y el protocolo es parecido al de los calibres (pies de rey) que he utilizado anteriormente en sistemas CNC. El movimiento es muy suave y la lectura es precisa y sin oscilaciones con un precisión de 0,02 mm y una resolución de 0,01. Suficiente para ajustar la posición del objetivo respecto la cámara. El motor que está junto al micrómetro, es el que mueve el conjunto del colimador mediante un engranaje. |
 |
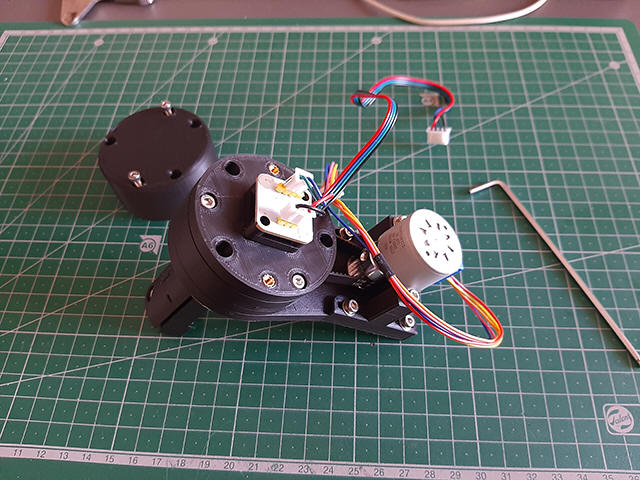
Vista del conjunto de movimiento de la red de difracción. El
posicionamiento de la red, se efectúa mediante un motor que actúa sobre un
engranaje en el eje que soporta la red. El eje dispone de un sensor magnético de posición con una resolución de 0,08 grados, lo que permite seleccionar perfectamente la parte del espectro a observar. La red de difracción se sitúa dentro de una caja que puede bascular verticalmente, para ajustar la proyección del espectro en la cámara. Esta operación puede efectuarse fácilmente, situando la red en el orden-0 (actúa como un espejo), y accediendo al tornillo que permite bascular la red, sin necesidad de desmontarla. Para lo que se ha previsto un acceso desde la pared lateral del espectroscopio. El sistema de control de la red, permite mantener la red en el orden 0, donde actúa como un espejo, y de esta forma poder verificar con la cámara la posición correcta de la estrella en la abertura del espectrógrafo. |
 |
En esta foto, puede verse el sensor de posición del eje de la red de
difracción. Este sensor es el AS5600, y se comunica con la tarjeta de control mediante un puerto I2C. La resolución del sensor permite mover la red de difracción con una precisión sobre la cámara correspondiente a 12 Å. Suficiente para identificar la parte del espectro en observación. La ventaja de que el sensor da la posición absoluta del eje, permite en caso de perdida de la alimentación o fallo del sistema de control, conocer siempre la posición de la red de difracción. |
 |
El control completo del espectroscopio se realiza mediante un
Arduino UNO, con una tarjeta diseñada expresamente para la utilización
del espectroscopio. Inicialmente esta tarjeta de control fue diseñada
para el espectroscopio Spec3K. Automatiza el movimiento de 3 motores: - Objetivo - Colimador - Red de difracción Dispone de una interface par la lectura del micrómetro y decodificación del protocolo del mismo. Dispone de 2 salidas para conexión del puerto I2C: - Conexión del sensor de posición del eje de la red de difracción - Comunicación con un segundo Arduino, para el control del motor de enfoque del telescopio guía. Dispone de salidas adicionales: - Control de un relé. - Iluminación de la rendija (no necesario para este modelo de espectrógrafo). - Salida de voltaje para accesorios. - Salida de puertos adicionales (pins A0, A1 y A2 del Arduino). |
 |
Esquema del circuito de control del espectroscopio
Spec3K, utilizado para automatizar las funciones del nuevo
espectroscopio. Se trata de un circuito que se conecta a un Arduino
UNO (formato 'shield'). - Dispone de control de 3 motores de pasos (unipolares). - Interface para conexión del micrómetro digital. - Interface I2C para lectura del sensor de posición del eje de la red. - Interface I2C para comunicar con el Arduino de control del telescopio guía. - Salidas adicionales (no utilizadas en este espectroscopio). Atención: El regulador de voltaje del micrómetro (LM317LZ) tiene un error en el esquema, ya que el componente seleccionado para el diseño, tenía los pines 2 y 3 intercambiados. (Pulsar sobre la imagen para acceder al esquema en mayor resolución) |
| |
Diseño del circuito finalizado. Para el diseño y fabricación he utilizado los recurso de JLCPCB. |
 |
 |
 |
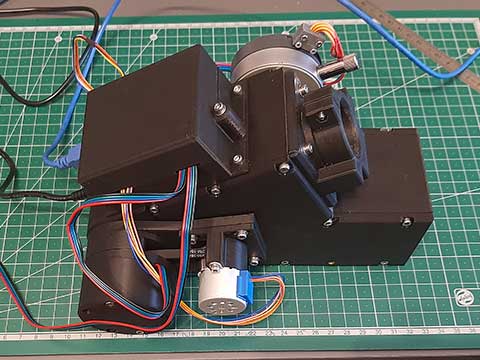
Vista del espectroscopio con el tubo óptico
SkyWatcher 80ED. El espectroscopio está montado en un lateral del
tubo, de forma que el espectro es perpendicular a los movimientos de
ascensión recta del telescopio. De esta forma las derivas por error
periódico de la montura se registran en perpendicular al espectro, y
no disminuyen la resolución del mismo. La cámara utilizada es una Atik 314L+. La conexión entre el tubo óptico y el espectroscopio, se realiza con dos prismas cenitales. El primero es un prisma de 2 pulgadas, para evitar problemas de viñeteado, mientras que el segundo es uno de pulgada y cuarto. Sobre el espectrógrafo está el microcontrolador (caja negra) para control de motores, micrómetro y posición de la red de difracción. El peso del tubo óptico con todos los accesorios (guía, buscador, ordenador, etc...) es de 7.7 Kgs. |
 |
Otra vista del telescopio con el espectrógrafo. Puede verse el conjunto de movimiento de la red de difracción. Sobre el tubo óptico están situados el telescopio guía (SW 50ED con cámara ASI 120MM) y una segunda cámara ASI 120MM con un objetivo gran angular, para observación de posibles nubes, neblinas, ... La caja cuadrada gris es el distribuidor de alimentación y contiene un segundo Arduino UNO para el control del enfocador del telescopio guía. Sobre el distribuidor de alimentación está el ordenador de control (MiniPC Win 10), que se conecta mediante ethernet a al router de la Wifi. |