
La Sphinx SXD : une monture compacte
AVERTISSEMENT : Cette page a été rédigée en 2010 ; elle ne s'applique qu'à la monture SXD alors que les montures SX2 et SXD2 qui ont suivi (et semblent être arrêtées ?) peuvent être notablement différentes. Les considérations qui sont développées sont spécifiques à la monture SXD et concernent donc des montures disponibles uniquement sur le marché de l'occasion.
Quelques impressions sur la monture Vixen Sphinx SXD.
Vixen, avant tout un fabriquant de mécanique, s’est taillé une excellente réputation avec la série de GP GPDX à la fois abordables, fiables, de qualité constante et donnant de bons résultats à tel point que ces montures ont été largement copiées.
Pour contenir la concurrence chinoise et l’obsolescence des composants de l’excellent Skysensor la gamme devait évoluer ; il est donc advenu les montures Sphinx équipées d’un contrôleur d’un nouveau genre : le Starbook. Les montures Atlux et Gaiax destinés à des instruments lourds (charges supérieures respectives 22kg et 50kg) sont désormais également distribuées équipées d’un Starbook.
Il est à noter que le marché japonais représente une très grosse partie des ventes pour Vixen qui répond, logiquement, en priorité à un marché national. Ceci explique certains choix commerciaux et technologiques qui nous paraissent parfois étranges vus d’ici.
Quoique certains composants sont communs aux différentes montures GP GPDX ATLUX SXW/D, le design de la Sphinx est original par une intégration optimale des moteurs alors que trop souvent, même aujourd’hui, les moteurs des montures équatoriales ou leurs encodeurs sont encore considérés comme des « options » posées en excroissance sur le corps des montures...
La
Sphinx SXD : une monture compacte
Quoiqu’il en soit, la Sphinx étant plus chère à produire que la série des GP et peut être parce que son succès est mitigé pour différentes raisons détaillées sur cette page, Vixen distribue toujours sa gamme GP GPDX/GPD2 mais équipées d’un contrôleur dérivé du Starbook (il semble qu’initialement la GPDX ou GPD2 devait être abandonnée au profit de la Sphinx SXW).
La Sphinx est disponible en deux versions SXW et SXD (ainsi qu’une version SX sur support de table dont on ne comprend pas l’intérêt sauf, peut être, sur le marché japonais…) qui diffèrent par leur capacité. La SXD comble un trou : il n’existe en effet aucune monture légère (de moins de 10kg) capable de supporter confortablement une charge de 15kg.
Les Sphinx sont bien finies mais la peinture blanche semble
fragile. Il y a de nombreux capots en plastique.
Vue de l’intérieur, la Sphinx SXD est d’une qualité semblable aux GP/GPDX et utilise les mêmes dispositions et réglages qui ont fait leurs preuves. Les axes ne sont pas plus gros mais les roues dentées comportent 180 dents au lieu de 144 ce qui peut améliorer (et améliore d’ailleurs) légèrement la qualité du suivi et la précision du GOTO (aux errances de la motorisation près).
Bien que la base des Sphinx soit renforcée par rapport aux GP, un intérêt non négligeable de la Sphinx est son poids plume (à vide : 7kg pour la SXW, 9 kg pour la SXD). En terme de rapport poids monture/capacité de charge on ne fait pas mieux… En outre, l’intégration totale des moteurs, la limitation des câbles, la barre de contre-poids rétractable rendent ces montures très transportables et agréables à mettre en station. Accessoirement, la disposition des moteurs confère aux Sphinx une impression de massivité qu’elles n’ont pas vraiment car il y a beaucoup de « vide » entre le capotage et les axes… mais c’est bon pour le look.

Les
Sphinx paraissent "costaudes"
Les axes de la Sphinx SXW sont en aluminium et les paliers lisses ; ses composants et assemblages ressemblent à ceux de la GP. La charge maximale est donnée pour 12kg ce qui paraît tout de même limite si l’on compare à la charge limite de la GP (7kg) alors que la seule différence se situe sur la roue dentée soit, en théorie, seulement 25% de couple en moins au niveau de l’axe de la vis sans fin. En fait cette capacité de charge supplémentaire est également obtenue grâce à l’économie de charge totale induite par la disposition de la motorisation ; en effet, les moteurs et la platine électronique de pilotage de la Sphinx sont astucieusement placés dans la partie inférieure de l’axe DEC ce qui économise, à charge instrumentale équivalente, environ 3.5kg de contrepoids.
Si on se livre à un petit calcul (très empirique et sans valeur scientifique) sur la SXW : 7kg (GP) *1.25 (gain sur couple) + 3.5kg/2 (gain sur contrepoids) = 10.5kg. Ce qui valide, par le bas, la charge limite de 12kg annoncée pour la SXW (10kg ou 11kg serait plus approprié comme « charge commerciale ») ou justifie une légère sous-évaluation (communément admise) de la charge admissible par les GP.
Quant à la Sphinx SXD, à l’instar de la GPDX, ses axes sont en acier et les roues dentées en bronze ; les paliers sont montés sur roulement à aiguille. Les paliers sur roulement à aiguilles me paraissent relever davantage d’une démarche marketing que d’une nécessité mécanique car les paliers lisses de la GPDX font merveille et de toute façon, la fluidité des mouvements est bornée par la butée de l’axe AD qui se fait sur un palier lisse...

Localisation
des roulements à aiguille (doc Vixen) en rouge
Quoique qu’il en soit, la démonstration ci-dessus effectuée pour la SXD donne : 10kg (GPDX)*1.25(gain sur couple) + 3.5kg/2 (gain sur contrepoids) = 14.5 kg (CQFD). Dans ces conditions, la charge commerciale maximale de 15kg annoncée pour la SXD paraît valide.
En définitive, grâce à une conception astucieuse mais avec des composants similaires, les Sphinx SXW et SXD apportent une capacité de charge plus importante que les GP et GPDX ; toutefois, il est connu que ces dernières peuvent être chargées un peu plus (environ 20%) que les charges maximales commerciales, ce qui, de mon point de vue, n’est pas le cas des Sphinx SXD et SXW, ne serait ce que du fait de leur gabarit, de leurs faibles masse et volume intrinsèques et de la butée sur palier lisse.
La stabilité est éminemment dépendante de la rigidité du pied et de la répartition de sa masse. Les Sphinx peuvent être livrées avec un pied en aluminium HAL130 renforcé par rapport au HAL110 de la GPDX. En tout état de cause, la base de la Sphinx est différente et plus large que celles des GP ou clones ; il faut le savoir car votre pied pour GP ne prendra pas une Sphinx.
Je n’ai pas commandé le pied HAL130 mais seulement les têtes correspondantes pour les deux pieds dont je dispose : Berlebach UNI28 et tripode en aluminium ATS. Dans ces conditions, la stabilité est équivalente ou légèrement supérieure à la stabilité de la GPDX. Sur un pied ATS en aluminium et avec 13.5kg de charge instrumentale (MAK TEC 200), les vibrations sont amorties en une demi-seconde !

La
sphinx SXD sur pied ATS
Le freinage est nettement plus efficace que celui de la GPDX surtout en AD et le dépointage sur une pression, lors d’un changement d’oculaire, un coup de vent reste assez faible.
Globalement, on peut considérer un léger gain de stabilité entre la GPDX et la Sphinx SXD (et probablement SXW).
La base ne comporte pas de niveau à bulle ; cependant un niveau à bulle est intégré au viseur polaire ce qui est utile pour l’alignement.
Le réglage en azimut et élévation se réalise avec la même précision (ou approximation) qu’avec la GPDX ; la latitude de réglage en azimut est plus faible que pour la GPDX ; le pied doit donc être déjà bien orienté. Par ailleurs, il vaut mieux éviter de forcer sur les manettes en plastique…
Le viseur polaire est de facture identique à celui des GP mais avec quelques différences importantes qui rendent son utilisation plus facile. D’une part l’échelle horaire intègre un niveau à bulle permettant de compenser les défauts d’horizontalité plus facilement qu’en ajustant les pieds du tripode ; d’autre part la rotation du réticule se fait par le viseur lui-même et non par rotation de l’axe AD. Il faut tout de même penser à pré-positionner l’axe DEC de façon à présenter son perçage dans l’axe du viseur polaire (détail évident mais non signalé dans la notice), laquelle opération n’est possible qu’avec l’aide des moteurs… Le viseur est éclairé mais le réglage, se faisant par software et non par potentiomètre produit une intensité trop forte qui « éteint » presque la polaire.
Ceci étant, si la mise en station est plutôt plus aisée que sur la GPDX, elle ne semble pas plus précise ; en effet les réglages en azimut et surtout en hauteur sont « mous », affectés d’un jeu certain et le serrage des axes produit un décalage désagréable à anticiper. Une mise en station de très haute précision, même avec une méthode élaborée (Bigourdan…) reste un peu illusoire ce qui impose d’inévitables rattrapages en DEC.
La Sphinx utilise les platines standards GP et l’installation de l’instrument ne révèle pas de problème particulier. Un instrument de 13.5kg s’équilibre très bien avec deux contrepoids de 3.5kg+2.8kg soit près de 2.5kg de moins qu’avec la GPDX !
Le serrage de l’axe AD avec un levier est aisé et bien franc. Le serrage en DEC, tributaire de molettes de faible diamètre situées juste sous la platine support de l’instrument et difficiles à saisir, est incertain et douloureux pour les doigts… Les axes paraissent plutôt mieux freinés que sur la GPDX.
La monture comporte des petits repères sur les axes AD et DEC qui facilitent l’initialisation du GOTO. En effet, si tout est bien calé, la première étoile alignée se trouve très près du centre du chercheur.
Le Starbook avec son écran LCD est pourvu d’une véritable interface utilisateur et de touches de fonctions dont la configuration, variable, est affichée sur l’écran. Je ne décris pas en détail les fonctions parce qu’il est possible de télécharger les notices et de se rendre compte par soi même de la bonne ergonomie du produit.
Intéressant à savoir : le système d’exploitation du Starbook (eCOS) est issu du monde GNU et est distribué par RedHat fournisseur d’une version de Linux bien connue. Le système eCos n’est pas un Linux mais utilise des API compatibles ; il équipe un très grand nombre de matériels actuellement. La puissance du calculateur embarqué est équivalente à celle d’un Pentium 100MHz.
La prise en main du Starbook puis son utilisation sont très intuitives. L’interface utilisateur utilise les conventions habituelles (Menus déroulants, OK, Annuler, etc…) et ne nécessite pratiquement pas la lecture de la notice.
Il est connu que l’écran rétro-éclairé est trop lumineux ; des filtres sont disponibles (moyennant quelques Euros) pour atténuer la gêne qui en résulte ; il sont alors simplement fixés sur le boîtier avec une bande adhésive ce qui fait un peu «bricolage» ; Vixen aurait été bien inspiré de prévoir un capot intégré au contrôleur pour recevoir ces filtres. La forte luminosité du Starbook n’est pas seulement gênante pour l’ouverture des pupilles… elle semble aussi attirer les moustiques ! Heureusement, une option bien utile du programme permet d’éteindre l’écran après un délai spécifié en l’absence de commandes (les touches de direction ne rallument pas l’écran).
Les polices utilisées pour l’affichage sont nettes mais tout de même assez petites et pour les presbytes (comme moi, correction environ 1.5/2D), le port de lunette est préférable mais non indispensable.
L’affichage des étoiles, jusqu’à la magnitude 7, n’est pas indispensable mais donne une impression de contact plus intime avec la voûte étoilé. C’est du « gadget » agréable…
Les touches, non rétro-éclairées, sont assez rapprochées et il est facile de se tromper mais cela ne conduit jamais à des catastrophes car les choix les plus critiques doivent être confirmés.
A signaler, le catalogue limité d’objets : 4800 NGC+IC (*) contre 7840 NGC+5386 IC pour le Skysensor… Il manque en outre à ce catalogue les SAO, les étoiles doubles, etc…
Les planètes et les objets Messier s’affichent sur la carte de même que les constellations et l’équateur céleste. Vingt comètes peuvent être introduites manuellement via une interface Web. Les satellites des planètes, les surfaces lunaires remarquables, les objets terrestres et artificiels (satellites) ne sont pas prévus. La réfraction atmosphérique (King), les vitesses lunaires, solaires ou King ne sont pas proposées. Il n’existe pas non plus de fonctions d’identification, de « tours » préprogrammées, etc…
Si l’écran affiche la position des objets Messier, les objets NGC/IC ne sont pas affichés sur la carte et les étoiles (sauf 35 étoiles remarquables pointables par leur nom) ne peuvent pas être pointées par leur numéro de catalogue SAO qui n’est pas implémenté dans la base.
Le contrôleur affiche l’heure locale et la date. Le temps sidéral n’est pas affiché. La précision de l’horloge interne, après contrôle sur une horloge Internet après une semaine, est correcte sans plus (quelques secondes).
Au-delà de l’alignement et du GOTO simple sur 5000 objets, les fonctionnalités du Starbook sont donc assez limitées et certainement trop limitées pour des grosses montures de type Atlux et Gaiax installés en poste fixe ou dans un observatoire.
(*) La pub annonce un peu plus de 22000 objets. En fait ce chiffre inclue les étoiles affichées à l’écran mais non adressables en tant qu’objets catalogués.
L’alignement du GOTO se fait facilement. Il est conseillé d’aligner sur deux étoiles situées du même côté du méridien et proches de l’équateur puis de passer à une troisième étoile côté opposé du méridien. Moyennant un tel alignement, le GOTO est assez précis (environ 10’) et surtout très constant. L’alignement peut être poursuivi jusqu’à 19 étoiles (et non vingt comme indiqué dans le manuel) mais, curieusement, un réalignement sur une étoile déjà alignée, consomme une « unité » ; au-delà de la dix neuvième étoile, l’alignement semble néanmoins être pris en compte.
En terme de précision de pointage, si je compare avec le SSK2, ce dernier donne des GOTO de précision moyenne moins constante imposant (mais permettant) souvent un réalignement à proximité des zones observées mais plus précis (<5’) après réalignement rapproché. Sur le Starbbok, un alignement sur cinq à six étoiles assure un bon pointage (sur un champ de ½°) sur la totalité du ciel mais un réalignement proche, n’est pas toujours accepté et ne semble pas toujours donner un gain significatif du fait que l’algorithme parait optimiser le modèle sur l’ensemble de la voûte étoilée et non sur une zone restreinte à la proximité des points d’alignement.
La monture gère le retournement au méridien avec une excellente précision démontrant la qualité de la réalisation mécanique notamment la bonne perpendicularité des axes (très faible erreur de cône). Le retournement n’est pas anticipé ; un message à acquitter s’affiche à l’écran lorsqu’il est nécessaire (il n’est pas possible de passer « outre »).
Quelques détails désagréables cependant :
- un réalignement proche n’est possible que si le précédent point d’alignement est à plus de 10°. Autrement dit, si vous souhaitez « refaire » un point d’alignement, il peut être refusé si le point précédent est trop proche : dit comme ça, cela paraît évident mais en pratique, c’est très ennuyeux pour ceux qui sont habitués au GOTO « relatif » plus précis. Cette limitation logicielle est d’autant plus « bête » qu’il suffit de se réaligner à plus de 10° sur un point N puis de revenir au point N-1 pour que l’alignement soit accepté… Un simple message d’avertissement aurait donc suffit,
- un alignement se fait obligatoirement après un GOTO (et encore à plus de 10° du point précédent) ; cela paraît également évident mais en pratique, cela implique de passer par le mode CHART, de provoquer un GOTO et donc de perdre le pointage du télescope. Il n’est donc pas possible d’aligner « au vol »,
- l’impossibilité d’introduire en clair les coordonnées des objets à observer : il faut utiliser l’écran et se rapprocher des étoiles affichées ou encore suivre le défilement des coordonnées sur l’écran,
- la perte de l’alignement lors de la mise hors tension ; il n’existe pas non plus de fonction « parking » permettant de conserver l’alignement.
Malgré ces lacunes, le GOTO de la monture SXD est fiable, de bonne précision et agréable à utiliser en visuel mais il manifestement plutôt été conçu pour les débutants que pour satisfaire les astronomes-amateurs exigeants rompus aux diverses conditions d’utilisation d’une monture équatoriale informatisée…
La différence avec le SSK2 est déconcertante. Détaillons les choses :
Le SSK2 comporte quatre vitesses de rattrapage avec une progressivité automatique de la vitesse. Même en haute vitesse, des petites pressions de touches permettent des rattrapages fins. Il m’arrive d’utiliser le SSK2 sans jamais changer la gamme de vitesses ; le recours à la vitesse faible n’est nécessaire qu’en photo ou à grossissement très élevé.
Le Starbook comporte neuf vitesses de rattrapage mais sans aucune progressivité ce qui impose de jongler avec les touches de zoom pour se trouver à la bonne vitesse par rapport au but poursuivi. En outre, presser [Zoomer +] pour réduire la vitesse [-] à quelque chose d’illogique que je n’arrive pas à intégrer. Un minuscule bargraph indique le niveau de zoom (et donc de vitesse) et la taille du réticule varie suivant le niveau de zoom ; ces indications sont très utiles mais une indication en clair du niveau de zoom aurait été préférable ; on s’y fait mais ce n’est pas pratique...
Je n’ai pas fait de mesure précise de l’erreur périodique mais un simple suivi sur un oculaire fort gradué car je n'ai pas eu le temps de relever une courbe. L’EP semble raisonnable <= +/-10" (*), ce qui est correct pour cette gamme de monture.
Les moteurs émettent un sifflement aigu (à la limite du supportable) et légèrement irrégulier. Mais une observation attentive à l’oculaire fort réticulé met en évidence une synchronisation entre les irrégularités sonores et un moutonnement (oscillations) du suivi en AD de fréquence élevée et d’amplitude de 4" à 6" ce qui est suffisant pour être perceptible en visuel (**). Mais, aléatoirement, et surtout à froid, le suivi effectue parfois un saut très rapide d’une dizaine de seconde d’arc immédiatement compensée (soit un « aller et retour »). Ces défauts sont assez minimes mais très visibles et très agaçants.
Enfin, le suivi en AD, accuse une dérive moyenne en AD (0.1% à 0.2%) à la limite de l’acceptable.
Le rattrapage en AD, après ajustement du backlash à 20%, s’est révélé chaotique car suivi, à l’arrêt, d’une petite secousse très rapide de quelques secondes d’arc dans le sens horaire (immédiatement compensée dans le sens inverse comme ci-dessus).
Lors de la première utilisation, les mouvements en DEC, se sont révélés erratiques avec « broutage » à moyenne et haute vitesse et un « jeu » énorme impossible à rattraper. Cependant, ce défaut a été réglé par un ajustement de la pression VSF/Roue dentée dont le réglage usine était beaucoup trop serré.
Enfin, à basse vitesse, juste après arrêt d’un rattrapage en DEC, le moteur AD se met impulser des sauts rapides de 5" à 10" sur l’axe AD dans le sens horaire ! Ces sauts peuvent se rééquilibrer immédiatement ou perdurer quelques secondes. En équilibrant le moteur DEC à la main (après ouverture des capots), les impulsions sur l’axe AD cessent… J’ai bien écrit « sauts en AD » après « rappel en DEC » : ce défaut est mécaniquement incompréhensible et provient soit d’un bug du software soit, plus vraisemblablement, d’un défaut de l’électronique de pilotage.
Un essai avec moteur désaccouplé de la VSF (mais pas du réducteur) et examen à l’oscilloscope de la tension au moteur appliquée sembler confirmer des défauts de pilotage ; autrement dit, aucun ajustement mécanique ne peut régler ce problème d’origine logicielle ou électronique. Peut être une mise à jour du firmware est à attendre mais je pense qu’il s’agit plutôt d’un choix de moteurs et/ou d’encodeurs inadaptés à la précision de pilotage requise.
Paradoxalement et malgré ces plaintes, l’EP raisonnable laisse espérer des clichés de quelques minutes sans guidage pour des focales de téléobjectifs (300mm ou moins).
(*) Vixen annonce +/-8s ce qui doit être vrai
(**) J’ai examiné différentes courbes de suivi de montures
équipées de Starbook ou Starbook-S et cette caractéristique leur semble
commune.
Ma monture était livrée avec la version V1.2B40 du logiciel.
Les utilisateurs rapportent que la version V1.2B35 est plus fiable et donne un meilleur suivi. C’est sans doute exact pour la SXW mais pas pour la SXD pour laquelle la V1.2B40 a été publiée ; sur ma SXD et avec la version 1.35 chargée, le comportement est à peu près le même mais avec un bruit plus sourd des moteurs.
Enfin, sur le site de VIXEN US, une version V2.0 est publiée. Après chargement, les fonctionnalités semblent identiques. A priori, cette version semble différer surtout par la version du système d’exploitation eCos (V2.0 actuellement).
A noter que les utilisateurs signalent un autre défaut des deux dernières versions (V1.2B40 et V2.0) : le Starbook semble opérer, à intervalles de quelques minutes, des rattrapages en DEC alors que la V1.2B35 n’effectue aucun rattrapage en dessous de trois alignements! Or un rattrapage automatique grossier en DEC (et même en AD) est relativement incompatible avec une utilisation en photographie. Je n’ai pas vraiment pu mettre en évidence ce défaut sauf que, au vu du comportement en AD lors d’un rattrapage, une activation même minime de l’un ou l’autre des canaux AD et DEC peut suffire à entraîner des sauts en AD et expliquer une inconsistance du suivi en l’absence de toute action manuelle sur le contrôleur.
En définitive, malgré une EP satisfaisante, le suivi présente des oscillations de très hautes fréquences et d’amplitude 4" à 6" sensiblement supérieurs à la turbulence ; en outre des « allers et retours » brutaux en AD jusqu’à 10" voire plus peuvent se produire soit après un rattrapage manuel en DEC ou en AD ou aléatoirement (ou éventuellement après un rattrapage en DEC forcé par le logiciel ?)... Non sans compter la dérive moyenne de 0.1% à 0.2% relativement indigne d'une monture de ce prix.
J’ai échangé avec quelques utilisateurs pour confirmer que d’autres SXD semblent affectées des mêmes défauts : oscillations à fréquence élevée d’une part et sauts rapides aléatoires en AD (ou parfois en DEC) et après rattrapages sur l’un ou l’autre des deux axes d’autre part.
Certains invoquent :
- un ajustement mécanique trop serré,
- des versions non optimisées du logiciel sans qu’il soit
possible de se faire une idée précise de la meilleure version…
- l’équilibrage à orienter d’un côté ou de l’autre de
l’axe horaire,
- la graisse…
Il est bien sûr possible de se lancer dans un grand démontage, le remplacement de la graisse... avec parfois quelques succès mais je trouve que c’est un peu choquant pour une monture vendue près de 2000€ !
J’ai seulement tenté, sans succès, un ajustement de la tension VSF/Roue dentée en AD et une alimentation plus forte. Le seul ajustement qui semble donner un résultat probant est le déséquilibre de la monture dans le sens du soulagement des moteurs... c’est à dire dans un sens qui conduit à laisser « flotter » la VSF, ou encore dans le sens inverse de celui généralement recommandé ! C’est illogique et me paraît beaucoup trop critique sur le terrain pour être acceptable non sans compter qu'un tel ajustement n'est pas favorable vis à vis de l'erreur périodique mécanique.
Personnellement, l’ouverture du capot me suffit pour comprendre l’origine des défauts : si les moteurs de la SXW semblent être encore ceux du Skysensor 2000, ceux de la SXD sont bien différents ; il s’agit de minuscules moteurs CC SAYAMA vraisemblablement de type « cage externe » (16mm de diamètre) ; les encodeurs à 75 pas sont d’origine Rulhatec. Ces mêmes moteurs et encodeurs semblent être distribués avec les Starbook-S destinés aux GP ; vraisemblablement, ils remplacent les MT4 plus anciens et l’on peut craindre que, à l’avenir, ils équiperont également les SXW (hypothèse personnelle).

Les
moteurs taille "crayon" de la Sphinx SXD !
Même si le couple des moteurs à cage externe est élevé, ces tailles réduites ne m’inspirent guère quant à l’inertie du mouvement et la précision de suivi obtenue et expliquent au moins partiellement la criticité de la monture vis à vis de la charge, de l’équilibrage et/ou de la tension des axes.
Daniel D (dd) m'a autorisé à publier les courbes d'EP qu'il a réalisé sur une monture SXD (retournée au vendeur depuis). Daniel dispose d'un C8 avec divers équipements photos. La première courbe est réalisée avec une monture bien équilibrée et modestement chargée (C8 seul) :
Courbe
EP sur la monture SXD de Daniel (C8 seul)
Cette courbe montre une erreur faible (+/-5 secondes) mais peu périodique et comportant des oscillations de très hautes fréquences encore modérées sous la charge du C8.
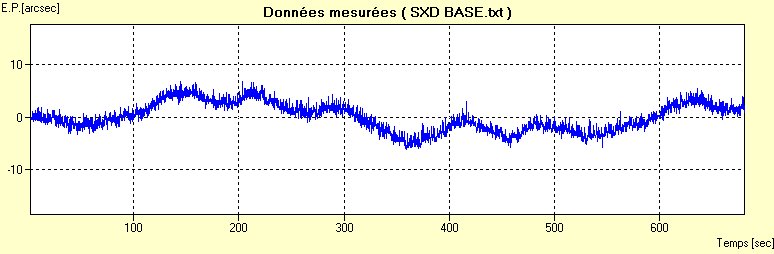
La deuxième courbe est réalisée avec l'équipement photo complet (charge totale de 12kg).

Courbe
EP avec 12kg de charge sur la monture SXD de Daniel
Outre une augmentation de l'EP mais qui reste dans des limites raisonnables pour une monture de cette catégorie, cette courbe montre surtout une certaine irrégularité et une augmentation très importante des oscillations haute-fréquence que l'on ne peut décemment pas attribuer à la turbulence (amplitude >5"). Un meilleur équilibrage permettrait éventuellement d'améliorer ce résultat mais ces deux courbes illustrent bien le "moutonnement" repéré en visuel sur ma propre monture et sa grande criticité vis à vis de la charge.
Par contre Daniel n'a pas signalé de mouvements anormaux en AD lors de rattrapages en DEC ou AD ou aléatoires.
Récemment introduite pour faire bonne mesure aux réclamations des utilisateurs, la PEC n’est pas mémorisable et doit être réenregistrée à chaque session ce qui en limite son intérêt.
Toutefois, elle fonctionne bien en divisant par deux l’erreur périodique et en permettant de compenser la dérive horaire notable ou les erreurs de mise en station (sauf DEC). Après application de la PEC, le suivi est précis à +/- 5" sur une longue période de temps ; la précision du suivi en AD est alors bornée par les défauts signalés ci-dessus : oscillations de hautes fréquences ou aléatoires ou après rattrapage en DEC et précision vraisemblablement moyenne des réducteurs.
A noter que, si la PEC est activée, les mouvements lents sont très ralentis et en DEC, les rattrapages sont pratiquement impossibles : d’un sens cela évite d’avoir à supporter les « allers et retours » intempestifs qui suivent toute action sur les boutons !
La PEC n’est pas compatible avec l’autoguidage (les commandes d’autoguidage sont inopérantes) ; en fait je pense que, à l’instar des commandes manuelles, les commandes sont bien prises en compte mais impulsent des mouvements beaucoup trop faibles pour être efficaces ; un paramétrage particulier est peut être possible ?
Autoguidage : L’autoguidage est possible aux normes SBIG ou propriétaire (AGA-1). A en croire les utilisateurs, il donne des résultats satisfaisants sous réserve d’utiliser la version V1.2B35 du firmware, car les versions suivantes souffrent de rattrapages intempestifs en DEC (et probablement AD) pour autant que ce défaut soit gênant sur une monture bien mise en station.
Communications : Il n’est pas prévu de port série mais un port Ethernet RJ245 ; en effet, toutes les communications se font par le protocole HTTP. Le câble est facile à brancher mais la prise est montée trop près du capot et le débranchement du câble nécessite un tourne-vis pour pousser la languette de blocage. Le port Ethernet permet les mises à jours du firmware, l’introduction de comètes à partir d’une interface WEB. La connexion n’est pas très aisée puisqu’il faut soit configurer le PC sur les mêmes masques de sous-réseau que le Starbook (et utiliser un câble croisé), soit laisser un routeur avec serveur DHCP configurer le Starbook automatiquement (et utiliser un câble droit) ; cette dernière solution est la plus simple à mettre en œuvre sauf que, sur le terrain, on dispose rarement d’un routeur !
Mises à jour du logiciel : Il suffit de connaître l’adresse IP du Starbook pour lancer une routine de mise à jour.
Contrôle par ordinateur : Vixen indique que la monture est pilotable par Ethernet mais ne publie pas le protocole de communication ce qui fait que le Starbook n’est supporté que par un nombre restreint de logiciels. Un driver ASCOM incomplet et donnant des résultats variables a toutefois été écrit par un amateur sans aucun support de Vixen. Le mutisme incompréhensible de Vixen à propos de son protocole est regrettable et limite franchement les perspectives d’utilisation du Starbook.
Introduction des comètes (testée) : il faut disposer des divers paramètres orbitaux mais cette fonction ne pose pas de difficulté particulière. Les comètes sont bien trouvées par le GOTO au bon endroit mais seule la position initiale (celle des paramètres) est affichée sur la carte ce qui n’est pas d’un grand intérêt (sans doute un bug à corriger).
Alimentation : l’alimentation est moyennement gourmande : environ 1.2A max en utilisation GOTO à pleine vitesse, 0.4A en suivi normal avec écran allumé et 0.3A écran éteint. Testé sur une alimentation stabilisée d’atelier, le comportement est très peu sensible à la tension entre 10V et 13V. Une batterie au plomb gélifié de 7Ah peu encombrante suffit amplement pour plusieurs soirées, suivant leur durée, et conforte l’extrême portabilité de la monture. A savoir cependant, la prise d’alimentation, un peu spéciale (un jack minuscule dans lequel passe tout de même plus d'un Ampère !) est introuvable… Il faut donc prévoir d’acheter un câble supplémentaire lors de la commande.
Par rapport à une GPDX, une Sphinx SXD est donc un tout petit peu plus stable et un peu plus compacte ; elle soulage également la conscience de son propriétaire au-delà de 10kg de charge embarquée ; mais cette fois, gare au dépassement !… Malgré l’agrément d’un affichage graphique, les fonctionnalités du Starbook sont moins convaincantes que celles du Skysensor 2000.
La qualité de réalisation mécanique de la Vixen SXD est bonne mais il est regrettable et décevant qu’elle soit gâchée par une motorisation et/ou pilotage de « bas de gamme ». En terme de suivi et de guidage, une GPDX équipée du Skysensor fait beaucoup mieux. Pour fixer les idées, si le Starbook et l’électronique de pilotage constituent une solution tout juste acceptable pour une monture de la gamme Sphinx SXW/SXD, ils me semblent très en deçà des exigences d’une monture plus lourde de haut de gamme type Atlux ou Gaiax.
A noter qu’il est possible de remplacer la motorisation d’origine (ainsi que le Starbook) par un système FS2 ou Boxdoerfer ; c’est peut être une solution intéressante compte tenu de la bonne qualité mécanique de la monture mais le coût total rejoint alors celui d’une monture de plus haut de gamme… J’ai été tenté mais j’ai abandonné cette idée car le serrage de l’axe DEC est trop inaccessible pour permettre d’utiliser la monture en GOTO relatif.
Curieux : des clones de Sphinx existent déjà par Bosma (Chine) à moins qu'il ne s'agisse des mêmes montures fabriquées en tout ou partie en Chine ?
Nouveautés :
- Depuis 2010, un amateur espagnol propose une platine NEXSXD qui remplace la platine électronique de puissance d'origine de la monture par une platine compatible NEXSTAR. Il vous faut alors acquérir le contrôleur Nexstar auprès de Celestron ; cette solution n'ajoute "que" 350 euros (environ) au prix de la monture et est très intéressante, au moins, pour ceux disposant déjà de la monture. Les utilisateurs sont satisfaits ce qui tendrait à prouver que les problèmes de suivis se situent au niveau de l'électronique de puissance et non au niveau du logiciel Starbook ou des (trop) petits moteurs...
- Pour début 2012, Vixen a annoncé la commercialisation d'une monture Vixen SXP ; cette monture basée sur la SXD et dotée d'une capacité équivalente accueillerait les plus gros moteurs de la monture AXD (tiens !) et le nouveau contrôleur StarBook 10... Le prix semble élevé (~1.6X le prix de la SXD au Japon). A suivre.
Il y a du « très bon », du « moyen » et du « médiocre » sur Sphinx SXD :
- le « très bon » : la qualité mécanique,
une erreur périodique raisonnable, une monture très compacte,
stable et légère,
- le « moyen » : le Starbook qui, malgré
sa convivialité, est encore limité en comparaison avec les systèmes concurrents
et présente des lacunes inacceptables pour un astronome-amateur confirmé
-
le « médiocre » : une régularité du
suivi problématique, des rattrapages irréguliers du fait d’une motorisation critique et une dérive
notable, rare à l'époque des moteurs contrôlés
par quartz et microprocesseurs.
Une amélioration de la SXD est techniquement possible en adoptant une motorisation plus puissante munie d'un contrôleur de puissance plus stable et ne coûterait peut être pas grand chose à Vixen ou au client (cela d'ailleurs est proposé par une "tierce partie"); pour autant, une amélioration de la SXD peut être attendue pour… un certain temps suivant la réactivité de Vixen qui semble relativement ignorer le problème...! Alors que la SXW équipée de moteurs plus anciens, semble avoir moins de problèmes (attention, les nouvelles séries sont maintenant équipées des moteurs Sayama et du contrôleur qui va avec...)..
En conclusion, compte tenu de ce que j’ai constaté et même en admettant avoir tiré un mauvais numéro, je ne peux pas vraiment recommander la SXD.
A la date de ce test (2009), la SXW et sa motorisation basée sur les anciens moteurs MT4, du fait de ses capacités, de la qualité du suivi et de son prix posait moins de problèmes en particulier pour des utilisateurs itinérants et des télescopes d’une dizaine de kg tout compris. A voir si c'est toujours le cas aujourd'hui puisque la SXW reçoit désormais les mêmes moteurs que la SXD.
Alors qu’un certain nombre d’utilisateurs rapportent des expériences similaires (voir groupe Yahoo), Vixen Japon a été contacté par le vendeur qui a indiqué ne pas voir de raison à ces défauts et a demandé le retour de la monture au Japon pour réparation ; ainsi, pour être honnête et rassurer des acquéreurs éventuels, Vixen considère bien que le comportement de cette monture est anormal et a demandé son retour en SAV. Mais j’avoue avoir été assez dubitatif quant à la possibilité d’une amélioration qui ne peut passer, de mon point de vue, que par l’implémentation d’une motorisation ou d'une électronique de puissance totalement différente (*).
Quoi qu'il en soit, la monture a donc bien été renvoyée mais également remboursée... En effet, le vendeur (Teleskop-Service) a été très commercial et m’a offert toutes les options possibles (réparation, échange, remboursement, **...), mais j’ai finalement opté pour un échange avec un G11-Gémini... moyennant la différence et avec prise en charge gratuite du transport de retour de la SXD. J’ai donc reçu une magnifique G11 mais dont le Gemini était en panne... et TS qui n’en avait plus en stock, a du attendre une livraison suivante. Finalement, le nouveau Gemini reçu un mois plus tard marche parfaitement : inutile de dire que le fonctionnement de la G11-Gemini est à des années lumières de celui de la SXD : test détaillé ICI...
(*) Quelques mois après cette aventure, j'apprends
qu'une nouvelle version du logiciel (V 2.1) est publiée et censée
corriger "des" défauts de suivis (notamment "sauts"
en AD) pourtant qualifiés d'anormaux par
VIXEN Japon (j'ai le mail) !... Dont acte. Ceci étant, ce n'est pas la
première fois qu'une mise à jour du logiciel corrige des défauts
de suivis, d'autant qu'il y a plusieurs types de défauts... Cependant,
il parait que cette version marche mieux.
Bonne chance...
(**) TS m'avait proposé très courtoisement
une solution de remplacement provisoire (un FS2) mais je n'ai pas voulu me casser
la tête et préféré attendre le remplacement du Gemini.
Site de
Pierro
Review
of the Sphinx mount
Driver
Peter Enzerink
![]()