|
|
|
Space Communications with Mars
Response time and interferences (III) At the perihelion opposition, at 56 millions km from the Earth, a distance as short as 0.37 AU (1 A.U. = 149.56 million km), it takes 3 minutes and 7 seconds for a signal emitted by the DSN to reach Mars. But when Earth and Mars are the farthest apart at 2.52 A.U., it takes 20 minutes and 57 seconds to transmit the same radio signal. The communication lasts seven times longer ! Due to these time delays it is impossible to communicate with and control the rover in real time. When Earth and Mars are in conjunction (opposite sides of the Sun) at a distance of 2.49 A.U. another problem arises. This distance is not as much of a problem as having the Sun in the way, for it produces a lot of radio interference making communication almost impossible. Indeed, for distances of less than 10 solar radii around the Sun, the thermal noise contribution is quite severe and the use of amplifier at reception still increases this difficulty. Therefore it is very important than the spacecraft flying to Mars reaches the Red planet far before the conjunction so that engineers and scientists can gather data during a few months before be handicapped by communications problems. Noise Apart the Sun and the problem of distance, two other noise sources interfere with telecommunications : cosmic rays and thermal noise generated by the receiver. The signal strength or noise level estimation, also known as the "dB below W" or dBW, is a measurement of the absolute power expressed in watts, and no more a power ratio like could be the decibel. Knowing the signal power and the noise level at the source, at the distance of the Orbiter, we can estimate the signal-to-noise ratio (S/N) according to the bandwidth used. Like in radioastronomy, in space communications, engineers estimate that a noise level of -215 dBW/Hz at 10 GHz is acceptable for the large ears of the DSN network. For a bandwidth of 100 kHz and a signal close to 2x10-16 W or -157 dB (-157 dBW) at reception, the S/N is only 8 dB. It can be twice as higher if the bandwidth is ten times shorter but this configuration is almost unusable in practice excepted in some digital transmission modes. But 8 dB means that the DSN can theoretically receive such a signal without using error correction protocols, DSP systems or any BPSK or alike mode (although it does). In such conditions the transmission rate is relatively fast, up to 21 KB/s (166 kilobit/s). It is this kind of "small budget" configuration that was used until 2005 by space probes like MGS and other Cassini. Local communications on Mars Messages sent by rovers are first of all directed to Earth, but their power is so weak that even using the largest antenna from the DSN their location and recording is a complex and full-time task.
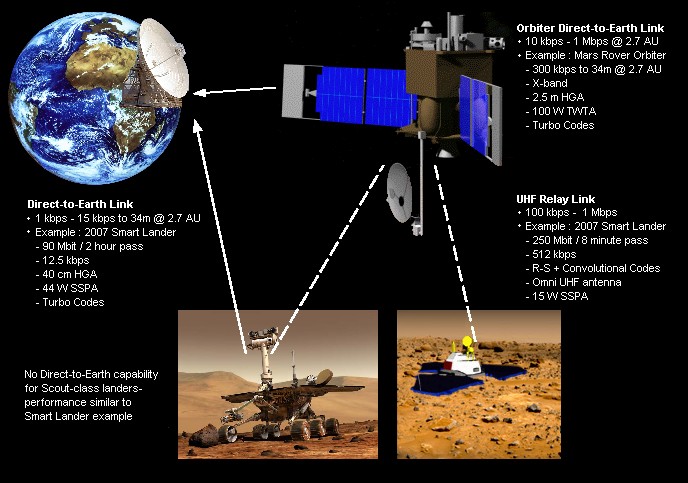
They communicate daily directly to Earth using the HGA, but most of the time rovers mainly uplink their information to nearest spacecrafts orbiting Mars, utilizing the Mars Odyssey or Mars Global Surveyor orbiter for example as messengers to pass along news to Earth as soon as they are in light of sight of their antennas. Conversely, orbiters can also send messages received from the DSN stations to the attention of rovers. The benefits of using the orbiting spacecraft are first linked to the fact that the orbiters are much closer to the rovers than the DSN antennas on Earth, and then the orbiters have Earth in their field of view for much longer time periods than the rovers on the ground that are subject to the Mars rotation. This mode of communication is precious because orbiters are only 400 km (250 miles) above the surface of Mars and rovers don't have to "yell" as loudly (or use as much energy) to send a message to orbiters as they do to communicate with DSN stations. The rovers stond in touch with Earth during a few months, using three different systems : a low-gain antenna (LGA), a UHF antenna, and a high-gain antenna (HGA). DSN antennas communicate with far-flung spacecrafts using microwaves S-, X- and K-bands at frequencies of 2.2, 8.4 and 32 GHz. X-band antennas used by the rovers The rovers exploring Mars communicate with each other, with orbiter(s) and the DSN through X-band UHF antennas, which are close-range antennas used at low power. These are like walkie-talkies compared to the long range of the low-gain and high-gain antennas. One UHF antenna is on the rover and one is on the petal of the lander to aid in gaining information during the critical landing event while the orbiter tracks the landing process. When rovers communicate directly to Earth, they send messages via both the low-gain antenna (LGA) and the high-gain antenna (HGA), both being capable of receiving the 7.2 GHz uplink signal and transmitting the 8.4 GHz downlink signal. The LGA is a choked circular waveguide design having about an 70° beamwidth pattern with about 6 dBic boresite gain at 7.2 and 8.4 GHz. Altough showing some directivity that will satisfy any amateur radio, according NASA engineers the LGA is considered as an quasi omnidirectional antenna. It is right that on X-band we are used to work with beams ten times narrower.
The LGA transmits signals at a low rate to the DSN antennas when the rover orientation is unknow. The omnidirectional UHF antenna communicates through orbiters passing overhead, not only with the mother spacecraft (e.g. Mars Odyssey for the rover Opportunity) but also with other passing orbiters like Mars Global Surveyor or the future MRO if needed. The HGA is a steerable beam that points itself directly to any antenna on Earth. The benefit of having a steerable antenna is that the entire rover doesn't necessarily have to change positions to speak with the DSN Like turning your head to talk to someone beside you, the rover can save energy by steering only its antenna in the right direction. About half of all communications will go through the HGA, a dish 28 cm in diameter that beams data directly to DSN over the X-band (8 to 12 GHz). The downlink data rate to the orbiter is established with the HGA at 1.85 kilobits/s or 264 bytes/s while the uplink data rate is 0.875 kilobits/s or 125 bytes/s in using the LGA The noise level received along with the spacecraft data signals are fairly high, but with the carefully designed front end of the DSN Block V receiver and the extremely high gain of the large dish antennas, engineers can obtain carrier-to-noise ratios of about 20 to 40 dB-Hz (ballpark). At Mars distances (depending on spacecraft configuration), signals can easily be tracked by phase-lock loops with a 1 Hz loop bandwidth. Like on the Mars PathFinder spacecraft, the Mars Odyssey lander HGA is a printed dipole array design utilizing a meanderline RCP (Right Circularly Polarized) polarizer. It is about 28 cm (11") in diameter and weighs 1.2 kg (2.5 lbs.). It has about 20.4 dBic boresite gain at 7.2 GHz and up to 25 dBic boresite gain at 8.4 GHz. During cruise, Mars Exploration Rovers use both the LGA and a separate medium-gain antenna (MGA), which is used only during cruise. Antennas on the cruise stage leave with it. The MGA on the cruise stage has a waveguide (a pipe) to the rover, that is not used on the surface. The LGA on the cruise stage connects directly to the LGA on the backshell, which in turn connects to the LGA on the rover, in a Russian doll sort of design. Images in 4K The Curiosity rover benefits from more efficient technologies than the old exploration space probes. It communicates with MRO or Mars Odyssey orbiters with a rate of 32 kilobits/s or 0.004 MB/s. On the other hand, the orbit-Earth link is between ~ 500 bits/s and 2 megabits/s or 0.25 MB/s between MRO and the Earth and at 128 kilobits/s or 256 kilobits/s between Mars Odyssey and the Earth. But like modems in their day, these speeds remain very slow when it comes to transmitting images in high definition 4K. To
see : Mars
in 4K To use : File size calculator
Some people have asked the engineers at JPL why they haven't installed HD video cameras on space probes exploring Mars? A 4K HD image contains 3840 x 2160 pixels for a density of 300 dpi and 32 bits per color. This represents 8,294,499 pixels (~ 8 megapixels) and 31.6 MB of data. Even sent the fastest at 0.25 MB/s, it takes over 2 minutes (126.6 s) to receive a single image in 4K. To receive 1 second of video, the DSN would have to wait nearly 53 minutes and wait almost 9 hours for a sequence of only 10 minutes! Not only is it very long but apart from a few swirls of dust from time to time, nothing is happening on Mars; the landscapes are inanimate. Even rovers spend most of the time stationary. There is therefore no point in sending videos from the planet Mars. Maximum usable distance The rover telecom system was functionally tested at JPL up to a distance of 250 meters from its base emitter. It performed quite well under environmental conditions typical of a warm (35°C or 95°F) August day. Engineers increased the distance well over 700 meters, the interval showing abundance of multipath reflections. The radio modems performed also well under those conditions and did not lose communications. However, under certain conditions, there is a degradation in the quality of the communications link. In particular at the lowest acceptable operating temperature of -30°C (-22°F), the Bit Error Rate (BER), due to an operating frequency shift may cause a communications blackout problem. If the rover is kept in the line of sight of the lander and the radios are kept at a warmer operating temperature, the maximum usable distance at which the rovers can communicate should be of at least 700 meters. The real constraint on how far the rover can be driven is based upon the stereo imaging range of the lander IMP camera. Beyond about 10 meters, the IMP camera resolution may not be able to provide good enough stereo coverage of a particular location to assist the rover navigation team in driving the rover. Engineers could count on the rover to get its navigation information from its own stereo cameras, but this procedure is certainly more tricky to plan and implement. If this operation is undertaken, the rover traverses would most likely be on the order of 2 meters at a time, because that is about the distance a ray can be projected by the rover cameras. However, given the banquet of interesting geologic formations near the lander, the scientists were content, in a first time, to remain in the immediate vicinity of the lander. However, they quickly ventured out much farther (in 2010, the Spirit and Opportunity rovers covered over 20 km each), but scientists kept in mind to remain rovers higher in elevation than the lander and in line-of-sight. In other circumstances, the communication between probes was established via the orbiter. Deep space transponder
A transponder is a communication system placed on board a relay satellite, which receives and re-transmits the signal, often on different downlink and uplink frequencies. This system is activated when the ground stations are out of sight from the orbiting satellite or from the rover and the direct communication link is lost. General Dynamics has worked with JPL to provide the spacecraft terminal for X- and Ka-band telecommunications with DSN. Making extensive use of the MMIC technology (for multipliers and amplifiers), multi-chip modules and a signal-processing ASIC, the SDST's flexible design provides the capability to meet the telecommunications needs of nearly every deep-space mission in a smaller, lighter and cheaper package compared to previous designs. The transponder shows the next performances : - X-band uplink : 7.145-7.235 GHz - X-band downlink : 8.400-8.500 GHz - X-band TX/RX ratio : 880/749 - Ka-band downlink : 31.800-32.300 GHz - Ka-band TX/X-band RX Ratio : 3360/749 The X-band receiver shows the next performances : - Noise figure : < 2.5 dB at 25°C - Carrier tracking signal range : -70 to -156 dBm - Carrier loop bandwidth (2-sided) : 20 Hz nominal at threshold (expands to 200 Hz, strong signal). - Carrier loop damping factor : 0.5 at 0 dB loop S/N (Type 1, 2nd order loop) - Tracking range : > 200 kHz. - Ranging filter type : 3-pole Chebyshev, other options being available - Ranging filter bandwidth (3 dB) : 1700 kHz nominal, other options being available - Temperature stability : about 3 ppm (-20°C to +60°C) Telecommunication relay capabilities Using the HGA, the downlink data rate directed to Earth varies from about 12 kilobits/s (1.75 KB/s) to as small as 3.5 kilobits/s (0.5 KB/s), a rate roughly five times slower than an standard 56K modem. But the data rate to the orbiters is much faster, with a constant 128 kilobits/s (18.2 KB/s), twice faster as the mean data rate of a 56K modem. An orbiter passing over the rover is in the vicinity of the sky to communicate with the rovers for about 8 minutes at a time, per sol (martian day). In that time, about 8.5 MB of data (about 1% of a CD-ROM capacity) can be transmitted to the orbiter. That same volume of data sent directly by the rover would take between 1.5 and 5 hours to transmit directly to Earth ! Rovers can only transmit direct-to-Earth for at most three hours a sol due to power and thermal limitations, even though Earth may be in view much longer. The best rate is detained by the Curiosity rover that transmits between 100 and 250 megabits/s, or between 12.5 and 31.25 MB/s of data to the orbiter per sol. If necessary, Curiosity can transmit its data directly to Earth but those same 31.25 MB would take almost 20 hours to be transmitted!
But there is a drawback in this system. While Mars is rotating on its own axis it carryies the rover with it and soon or late this latter is out of the field of view of Earth. Hopefully orbiters can see Earth for about 2/3 of each orbit, or about 16 hours a sol. They can thus send much more data direct-to-Earth than the rovers, not only because they can see Earth longer, but because they can operate their radio for much longer since their solar panels get light most of the time, and they have bigger antennas than rovers. Up to now, for the smallest landers like death-born Beagle 2 or Netlander, the UHF relay telecom function is passive and has no means to communicate directly to Earth. Contrarily to large explorers like Mars Exploration Rover (MER) or Smart Lander which UHF relay telecom can manage 10 times more data in return volume for the same expenditure of energy. In all cases, as we told, this is the Orbiter that provides navigation to assist in arrival at descent maneuvres as well as landed operations. Orbiting relays provide also a link to the night side of Mars that is hidden from the Earth's view. This short surface-to-orbit relay link is far more efficient that a direct to Earth link. Space communications difficulty with Earth increases as the square of the distance. At worst the maximum range is 2.7 A.U. or 400 millions km ! Compared to this, the in situ link ranges between 1000 to 6000 km only. In such circumstances the power loss to Earth exceed 266 dB (at 56 millions km) compared to the in situ link on Mars. Here your wattmeter should read 10-26 W at reception ! Note that the receive was not betterons with the space probe New Horizons that visisted Pluto in 2015. The pwoer of its emitter as 12 W but in reaching the DNS newtork, the signal was reduced to 3.45x10-22 W, or about thirty thousandth of a billionth of billionth of watt ! This loss must be compensated by the antenna gain, at both transmit and receive sites.
This huge difference of power is difficult to manage even using the largest DSN antenna, DSS-14 of 70 m in diameter. The Orbiter offers thus a first major advantage in providing surface-to-orbiter relay link to Earth with a reduced amount of energy. The second advantage is that in the same timeslot the rate and volume of data transmitted have drastically increased in a few years as shown in the next table.
In future, orbiters will fly at higher altitudes to provide longer communications with the surface rover, what will extend the coverage from 2 hours to 6-12 hours. Only drawback of such high orbits is the longer slant range to users. It will be compensate by the use of a medium gain and steerable antenna, providing a 13-15 dBi gain. At last, since 2005 Mars Reconnaissance Orbiter (MRO) and new explorers use still lower loss receivers to increase the signal-to-noise ratio. They for example operate with 2 dB lower filtering and radio loss compared to the older UHF relay radio design that was onboard Mars 2001. A concatenated Reed-Solomon code also improves the channel for short-links communications of another 2 dB gain, completed with turbo decoders that add another 0.5 dB of performance improvement to this set. The future of space communications will be loud and clear ! For more information Satellites reception (on this site) Characteristics of space probes + link to NASA press kit, UHF-Satcom Amateur DSN Group (Yahoo!) DSN Network, NASA Mars Curiosity Rover - Communication with Earth, NASA Space Frequency Coordination Group Mars Microrover Telecommunications FAQ The Parkes Observatory’s Support of the Apollo 11 Mission (500 KB PDF).
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||




{kind=link}