|
|
|
Quel télescope acheter et pour quel usage ?
Les systèmes de guidage automatique (I) Si tout amateur peut facilement acheter un instrument à la mesure de ses exigences, offrant des images plus ou moins brillantes et claires, sa capacité à trouver les objets célestes est limitée par sa connaissance du ciel et l'utilisation ou non d'un système de localisation des astres plus ou moins sophistiqué. Dans ce domaine le marché regorge d'accessoires : atlas du ciel, carte céleste, cartes lumineuses, pointeur laser, logiciels de planétarium, aide au pointage manuel, monture et/ou raquette de guidage automatique dite "GoTo", etc. En fait, l'amateur finit rapidement par se noyer dans la panoplie des accessoires et peut se fourvoyer en pensant que sa raquette de commande peut suivre les étoiles alors qu'elle peut tout au plus l'aider à localiser un astre mais certainement pas assurer un guidage précis sur l'objectif sélectionné ! C'est la première surprise qui attend l'amateur occasionnel qui ne s'informe pas... La seconde, la troisième et les autres surprises dépendront de son intérêt pour la chose. Ainsi, s'il peut acheter sans s'informer un moteur d'entraînement pour quelques euros au détour d'un rayon, il découvrira vite qu'il aurait été plus judicieux d'acquérir un servo-moteur équipé de la technologie "micro-stepping". Mais cela l'oblige à s'informer sur l'état de la technologie et des fonctions offertes par les matériels disponibles sur le marché, une manière de garder le contact avec le marché et les amateurs avertis. Sinon il n'y a pas de doute, au bout de quelques années, notre amateur occasionnel perdra pied et s'étonnera à quel point le marché a évolué... Nous allons donc décrire dans les pages qui suivent les différents systèmes d'entraînement en insistant bien sur les avantages et les limitations de chaque solution. Pour clarifier les idées, il existe deux systèmes : les cercles digitaux et les systèmes GoTo. Les deux technologies poursuivent le même objectif : pointer un télescope sur un objet donné du ciel. Mais leurs méthodes de fonctionnement, leurs fonctions et leurs performances sont différentes, bien qu'aujourd'hui elles tendent à converger. A l'origine, c'est-à-dire au milieu des années 1980, les cercles digitaux furent inventés pour aider les utilisateurs de télescopes dobsoniens à localiser les objets célestes car ils éprouvaient plus de difficultés que les amateurs utilisant des montures équatoriales. Les premiers modèles remplaçaient simplement la lecture analogique des axes du télescope par un affichage numérique. L'instrument devait malgré tout être aligné avec précision sur le pôle mais la lecture digitale apportait une précision inégalée jusqu'alors. Il faudra attendre les années 1990 pour que ce système soit complété par de véritables ordinateurs capables d'aligner et de suivre les astres, y compris sur des montures altazimutales. Puis, au tournant des années 2000, les appareils mobiles profitèrent de cette technologie grâce aux premiers Palm et autre Pocket PC tel le Casio présenté ci-dessus à droite dont le logiciel "The Sky Pocket Edition" de Bisque Software est capable de piloter la monture d'un télescope Celestron et autre Losmandy via le port série, USB ou sans fil (Bluetooth). La principalement limitation est la vitesse du processeur de l'appareil mobile. Aujourd'hui, il existe quatre systèmes numériques capables d'aider l'observateur à localiser ou suivre les astres au télescope. Du plus simple au plus complexe, nous trouvons : - Les "cercles digitaux" (DCS) qui affichent la position du télescope en ascension droite et déclinaison au moyen d'un indicateur lumineux fixé sur les axes. - Les cercles digitaux qui localisent les objets en tirant profit d'une base de données stockée en mémoire - Les consoles de guidage automatique GoTo capables de localiser et de suivre les objets célestes, complétées par une base de données astronomiques. - Les consoles GoTo incorporant la correction des erreurs périodiques et les fonctions des caméras CCD. Les cercles digitaux Nous avons expliqué à propos de la monture azimutale qu'il existe des systèmes manuels d'aide au pointage. Une solution similaire mais motorisée existe depuis des décennies pour les montures altazimutales et équatoriales, ce sont les cercles digitaux. Les cercles digitaux assurent les mouvements lents et indiquent à l'observateur dans quel sens il doit déplacer les axes de son télescope. Si l'instrument ne dispose pas de moteurs, l'utilisateur devra "pousser" lui même son télescope jusqu'à ce que l'ordinateur lui dise qu'il a l'objectif en vue. Contrairement à ce qu'on disait encore dans les années 1980, aujourd'hui les ordinateurs peuvent avoir le dernier mot... Bien vite vous allez donc équiper votre télescope de moteurs d'entraînement qui vous permettront cette fois, juste retour des choses, de demander au système de déplacer l'instrument dans telle ou telle direction. Mais cela se fera toujours manuellement, par l'intermédiaire d'une raquette de commande à boutons-poussoirs. Mais ici encore, lorsque l'objectif sera atteint, le système se contentera de vous signaler sur quel objet il pointe mais il ne lui viendra pas à l'idée de le suivre automatiquement. Cette fonction est uniquement assurée par les systèmes GoTo. Dans les deux premières catégories nous trouvons par exemple les consoles NGC-MAX et NGC-SuperMAX de JMI's Mobile, l'Argo Navis d'Obsession, le Skywalker d'Astrometrix (ou DCS de Losmandy) ou encore le System 5 de AWR.
Comme le disait un animateur bien connu, comment ça marche ? Par "cercles digitaux" on entend les cercles gradués fixés sur les axes d'ascension droite et de déclinaison des montures équatoriales ou sur les axes des montures altazimutales, associés à un système d'asservissement digital. Les systèmes de cercles digitaux sont constitués de 3 éléments : l'ordinateur de bord, les encodeurs et le matériel reliant les encodeurs à la monture du télescope, généralement par câble. Bien entendu tout ce matériel doit être alimenté en énergie et votre monture doit être équipée de moteurs d'entraînements continus (adaptés du secteur, sur batterie ou sur pile) sur les deux axes. Maintenant nous allons un peu parler technique pour bien comprendre le rôle de tout ce matériel. Les cercles digitaux étant avant tout destinés aux montures altazimutales, la conversion des coordonnées est effectuée par un micro-ordinateur incorporé au boîtier de commande tandis que c'est l'utilisateur qui déplace le télescope comme lui indique le système. La monture doit être alignée par rapport à deux ou trois étoiles. Le but est de mesurer la position de ces étoiles par rapport aux axes du télescope et à leurs coordonnées équatoriales et de résoudre simultanément les coéfficients des équations pour passer du système de coordonnées azimutal au système équatorial. L'électronique embarquée gère le mouvement de la Terre grâce à une horlogue sidérale interne. Ainsi si vous ne déplacez pas un télescope dobsonien équipé de cercles digitaux, vous verrez que les coordonnées affichées sur la console centrale changent progressivement d'ascension droite. On peut encore trouver des cercles digitaux ne fonctionnant que sur des montures équatoriales. En effet, certains modèles ne peuvent pas convertir en ascension droite et déclinaison les positions des axes altazimutaux. Si vous devez installer l'un de ces modèles sur un télescope dobsonien ou altazimutal vous devez soit acheter un inclinomètre tel le produit T2 de U.S. Digital ou un système de cercle digitaux comme le Navis Argos proposé par Obsession et JMI's Mobile. La plupart des cercles digitaux peuvent être complétés par des encodeurs et tout ce qu'il faut pour assurer le suivi des astres de manière automatique à partir d'un alignement sur deux étoiles. Dans cette configuration, ils ne se différencient plus des consoles GoTo. La différence est qu'ils s'adaptent facilement à n'importe quel télescope, y compris de fabrication personnelle et aux dobsoniens, ce qui a contribué à la réputation de ces derniers.
Une fois votre instrumentation mise sous tension, vous devez donner à l'ordinateur de bord des valeurs par défaut : la langue de travail, la vitesse de défilement des messages, la résolution des encodeurs, etc. Ceci se fait en principe une seule fois, au moment de la livraison, soit en encodant les valeurs directement sur la raquette de commande à distance soit à travers un logiciel installé sur l'ordinateur qui contrôlera votre télescope. Ces valeurs sont sauvées de manière permanente. Arrivé sur le site d'observation rien n'est encore joué. Après avoir bloqué les axes pour éviter toute erreur de pointage ultérieure, vous devez initialiser le boîtier de commande (l'ordinateur) afin que le système sache où il se situe dans le temps et l'espace. C'est pourquoi sur certains modèles vous devez encoder vos coordonnées géographiques, la date et l'heure exacte à chaque observation. Les modèles plus évolués disposent d'une horloge interne et d'un GPS et sauvegardent ces données de manière permanente. En fonction des mécanismes utilisés, certains cercles digitaux doivent être recalibrés (alignés) chaque fois que vous déplacez le télescope afin qu'ils conserventaient leurs repères pour calculer le déplacement des axes. Ainsi le cercle digital placé sur l'axe de déclinaison des Meade LX10 par exemple doit être calibré en permanence tandis que celui fixé sur l'axe horaire ne doit être calibré qu'une seule fois par session. Une fois ce réglage effectué vous ne devez plus y toucher de la soirée, sauf accident. Par contre les paramètres des cercles digitaux fixés sur la monture Losmandy G-11 par exemple doivent être recalibrés chaque fois que vous utilisez l'une des vitesses de déplacement rapide (slew speed) du système. Lorsque l'alignement polaire (ou sur deux étoiles), la résolution mécanique et la calibration seront correctement configurés dans le système, la combinaison de ces facteurs vous offrira une précision de pointage réellement impressionnante. Lorsque tout sera prêt, il suffira d'encoder les coordonnées équatoriales ou le nom de l'astre que vous désirez localiser et le télescope se chargera de vous le présenter dans l'oculaire. Parfois l'ordinateur cherche le chemin le plus long pour atteindre un objet tout proche du précédent ou mettra plus de temps pour localiser un objet situé près du zénith en raison de problèmes inhérents aux algorithmes utilisés et au calcul des tangentes. La durée de recherche peut atteindre 90 secondes. Ce délai reste raisonnable quand on sait qu'un observateur connaissant très bien le ciel prend de 30 à 90 secondes pour localiser manuellement le même objet. Notons qu'un système à cercles digitaux tel le Sky Commander par exemple localise plus rapidement les astres que le système GoTo LX200 qui équipe les télescopes Meade.
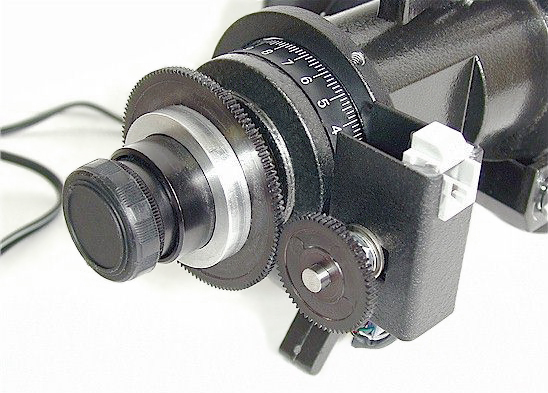
Les encodeurs jouent ici un rôle clé. Livrés avec les cercles digitaux ou les systèmes GoTo, ils assurent l'interface entre la raquette de commande et la monture du télescope. Les encodeurs sont des compteurs de déplacement traduisant des valeurs comme la vitesse, la direction ou l'angle d'un axe en signaux électriques. Ils peuvent être reliés à un ordinateur par une connexion série et afficher l'endroit du ciel où est pointé le télescope en temps réel. Inversement vous pouvez piloter votre télescope à partir de votre ordinateur si vous disposez d'un logiciel de simulation performant et d'encodeurs. Les encodeurs présentent en général une résolution voisine de 4096 pas par révolution, les pas représentant le nombre d'impulsions calculées à chaque rotation complète de l'axe d'entraînement. Chaque pas ou cycle (on parle aussi de phase, de ligne ou de "tic") peut fournir 4 impulsions à chaque révolution, c'est le traitement en quadrature. Ainsi un encodeur effectuant 4096 cycles par révolution peut fournir 4096, 8192 ou 12288 pas à chaque révolution. La quadrature consiste à discriminer ces quatre signaux dans une phase de l'encodeur, ce qui permet de quadrupler la résolution. Dans notre exemple, en utilisant un encodeur de 4096 pas, divisé par 1/360° cela correspond à une résolution angulaire d'environ 32". En pratique, cette résolution permet de placer tout astre, y compris la plus petite galaxie au centre de votre oculaire le plus puissant qui présente en général un champ d'environ 10'. Mais on peut facilement l'améliorer grâce à la quadrature. Ainsi, l'électronique embarquée donne dans notre exemple une précision de pointage d'environ 9", ce qui est quatre fois supérieur. Lorsqu'un entraînement très lent est requis, on peut utiliser des encodeurs offrant une résolution jusqu'à 32767 pas (Gemini de Losmandy) mais dans ce cas l'avancement doit être contrôlé avec la plus grande précision car le moindre mouvement irrégulier - quelques pas échappant au système - risque de perturber le système du guidage.
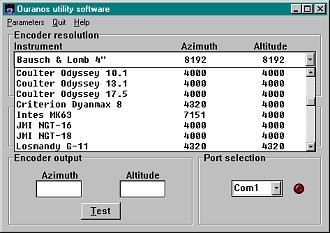
L'autre solution qui aboutit au même résultat consiste par exemple à attacher un encodeur de 90 pas sur une roue dentée comprenant 360 dents (d'où l'intérêt de disposer de roues dentées de grand diamètre). Le rapport 4:1 donne une précision potentielle de pointage d'environ 10". Si vous disposez d'une plus grande réduction au niveau de l'encodeur, la résolution apparente sera supérieure. Seul inconvénient, la moindre imprécision dans le contact des engrenages sortira le système de la boucle de contrôle et tout sera à refaire. Pour éviter ce problème, on utilise des encodeurs optiques plutôt que mécaniques qui permettent de mieux contrôler l'espace existant entre les engrenages (entre le disque de l'encodeur et le détecteur). Ce contrôle est effectué par une LED et une lentille collimatrice en polycarbone. Ce système fonctionne habituellement dans n'importe quelle condition (chaleur et froid extrêmes, poussière, champ électromagnétique, ions lourds, etc.). Si les encodeurs sont spécifiques à chaque monture de télescope, l'ordinateur est en général compatible avec la plupart des instruments du marché puisqu'il suffit de modifier ses paramètres de base pour qu'il s'adapte à un nouvel type d'encodeurs. Il peut même occasionnellement être utilisé indépendamment de tout télescope pour servir de base de données portable. JMI's Mobile et U.S. Digital par exemple en ont fait leur spécialité et équipent des montures aussi diverses que les Losmandy, Astro-Physics et toute la panoplie des dobsoniens du marché. Signalons enfin que les cercles digitaux consomment peu d'énergie comparés aux systèmes GoTo ce qui vous permet d'utiliser votre batterie durant plusieurs nuits consécutives sans devoir la recharger. Ces systèmes sont également plus fiables que les GoTo du fait qu'ils contiennent beaucoup moins de pièces d'électronique, mais en principe du matériel de qualité devrait vous donner satisfaction durant des années. Prochain chapitre Le système de guidage automatique GoTo
|
|||||||||||||||||||||||||||||||||||||||||||