| |
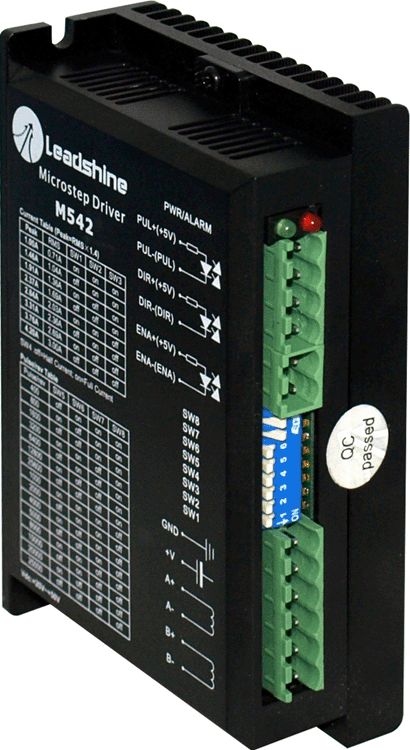
Les drivers M542 :
Les premiers à avoir été testés sont les M542 :
http://www.leadshine.com/productdetail.aspx?type=products&category=stepper-products&producttype=stepper-drives&series=M&model=M542
Ce sont des drivers analogiques classiques qui fonctionnent très bien si la tension d’alimentation est comprise entre 12v et 16v. Ne pas dépasser cette valeur sinon apparition de chocs au passage du point zéro des moteurs. A utiliser réglés sur 1.5A pour les moteurs Sanio Denki de 2A.
Ils ont été testés sur le T500. Leur avantage : ils sont très simples à régler via quelques inters DIP. On peut régler le courant à 1.5A, la résolution des micro-pas à 128.
Les drivers DM422 :
D'autres drivers dits numériques de référence DM422 ont été testés :
http://www.leadshine.com/productdetail.aspx?type=products&category=stepper-products&producttype=stepper-drives&series=DM&model=DM422
Ils fonctionnent aussi bien avec une alimentation. 13V8 que 27V. Réglage sur 1.3 ou 1.6A pour un moteur de 2A. Aucun choc sur le passage du point zéro. Bien plus petits en taille (pas de découpe à prévoir pour les fixer, juste 4 trous et 4 vis/écrous de 3mm), ils ne chauffent pas non plus avec des moteurs 2A. Par contre, ils sont plus complexes à régler. Il faut utiliser une liaison RS232 avec un PC afin de régler au moins la résolution des micro-pas. Adaptation automatique à l’inductance des moteurs via le switch SW4. Il y a possibilité de filtrage numérique sur les fréquences de résonance des moteurs. A régler pour chaque moteur et en charge… car ça peut modifier les réglages. Ils sont actuellement en fonctionnement sur le T500,
Ne pas oublier de commander le câble RS232 spécifique qui permet de programmer les drivers.
Autres drivers :
Au delà, il est possible d'utiliser des tas d’autres drivers pour moteur pas à pas. Il faut simplement qu’ils soient pilotable en mode PULE/DIR et que la résolution des micro-pas de 1/128 soit possible.
Pour rester chez Leadshine, voici la liste de leurs drivers :
http://www.leadshine.com/producttypes.aspx?type=products&category=stepper-products&producttype=stepper-drives
Voici un autre distributeur en France d’une partie de leurs drivers :
http://www.soprolec.com/shop/fr/37-drivers
Le premier testé par Laurent se retrouve sous la référence « Driver micro-pas Analogique 50V / 4.2A » , le deuxième sous la référence : "Driver micro-pas numérique 40V / 2.2A".
Pour conclure, provisoirement :
Afin de vous aider dans ce choix voici quelques caractéristiques spécifiques :
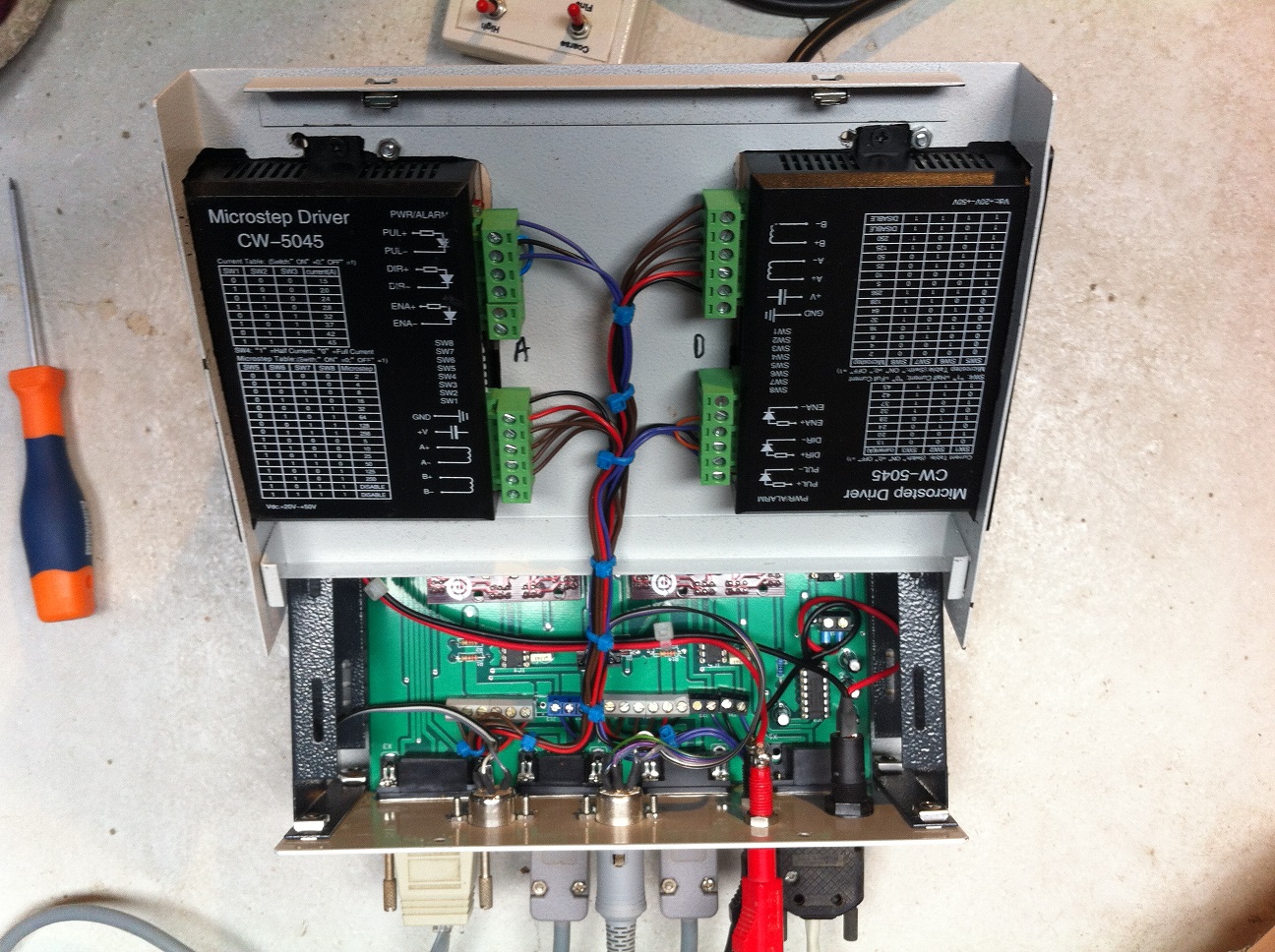
Drivers analogique CW5045
- simples à régler par switch
- fonctionnent bien jusqu'à 16V
- permettent de se limiter aux 13,8V d'une batterie
- moteurs jusqu'à 5A
- moteurs légèrement plus bruyants qu'en digital
- coût 120€ la paire ? |
Drivers digitaux (numériques) 2.2A DM4022
- très performants mais plus complexes à mettre en œuvre
-3 réglages à faire par soft
- réglages des pas
- réglages du courant
- réglages du coef d'asservissement
- fonctionnent jusqu'à 36V voir plus si modif. du CI
- fonctionnement silencieux des moteurs
- coût 108€ la paire + 7€ le câble de programmation |
Drivers digitaux 5A DM5056
- performance identique aux DM422 mais pour moteur plus puissants
- pour les gros télescope comme les 600 qui fonctionnent actuellement avec MCMT2
- coût 175€ la paire + 7€ le câble de programmation
|
Pour information, Claudine a fait tourner la lunette de Serge Deconihout (1500 kg de partie mobile) avec les drivers 2.2A sur des moteurs 3A sous 40V.
Elle n'avait pas alors réglé correctement le coefficient d'asservissement. Il est donc fort probable que cela tourne aussi sous 24V ou 27V.
Pour mémoire on met en général 75% de la puissance sous MCMT2 ce qui correspond à 2,3 A pour des moteurs 3A.
Elle n'a, par contre, pas réussi à utiliser les drivers dm5056 sur cette même lunette n'ayant pas bien réglé ce coefficient d'asservissement.
Les drivers analogiques fonctionnent eux aussi très bien avec cette lunette (435mm quand même !)mais ne sont pas adaptés à des tensions de plus de 16V (problème de vibration dans le passage à 0 en mode suivi).
Les drivers qui ont été testés sont des QJ5045 ou CW-5045 et ils ne sont pas équivalents au MD5042 de SOPROLEC. En fait ces driver ne démarre pas sous 17V d'alim.
Les drivers choisis seront donc des CW5045
_____________________________________________________________________________________
Les réglages
Configuration des drivers dm422 :
- Branchement du câble de programmation sur un des 2 drivers
- Démarrage du programme
- Choisir 422
- Choix du bon port com (vérifier son numéro dans gestion du périphérique)
- Cliquer sur la 2ème icône read write driver parameter
- Cliquer reset (en bas a droite)
- Lorsque reset terminé sortir du prog
- Redémarrer le prog
- Choisir 422c
- Sélectionner le bon port com
- Tunning
- Set parameter
- rRégler 1.4A et 128 upas.
- Option save to drive
- Fermer cette fenêtre
- Tunning
- Set loop current
- Régler kp 3000 ki 300 curent 1.4
- Cliquer 2 ou 3x sur start pour voir la courbe de courant
- Option save to drive
- Sortir du prog
- Après avoir branché le 2ème driver recommencer l opération
Si l'on passe par 422 au départ c est que la fonction reset drive n'existe pas sur le 422c
|
Les informations de Laurent :
Bien suivre le déroulement de Claudine pour la programmation des drivers de puissance numérique.
- La premiere partie permet de faire un reset des réglages de base du driver.
- La deusieme partie permet de régler le courant et la résolution des micropas.
- La troisième partie règle la vitesse à laquel le courant va arriver dans le moteur. Si le courant arrive trop lentement, il n'y a pas de puissance, si le courant arrive trop rapidement, le moteur vibre plus ou moins fortement. Claudine vous donne une valeur de 3000 pour kp et 300 pour ki.
La valeur de kp est trés importante, vous pouvez, bien sur, faire des essais avec d'autres valeurs (valeur maxi, de tête = 65535), mais dès 10000, je pense que vous constaterez facilement que les vibrations moteurs deviennent sensibles, par exemple, faites des essais de 5000 en 5000 puis affiner de 1000 en 1000 ou de 2000 en 2000 afin de trouver la valeur qui vous semble la meilleur entre puissance et vibration... coté précision, nous ne sommes pas à l'unité près. une valeur à 1000 près est largement suffisante.
Pour Ki, c'est un coefficient disons d'amortissement de second ordre, c'est un peu le même principe que Kp, mais finalement, mon conseil est de ne pas trop chercher à comprendre, une valeur de 300 ou 400 est bien. En grossissant la courbe tracée par le logiciel, vous verrez par exemple que la courbe d'amortissement du courant moteur peut se mettre à osciller autour de la valeur à atteindre... c'est un signal qui vous indiquera que Ki, voir aussi Kp, est trop élevé, c'est le signe de vibrations, le moteur n'arrive pas a trouver la position d'équilibre.
Si vous êtes perdu, ne pas hésiter à revenir à la configuration usine avec un reset du driver. c'est important ! Puis refaire vos réglages de courant, résolution micropas et Kp/Ki.
Personnellement, après avoir fait les réglages sur table, j'ai repris les réglages avec les moteurs sur le télescope afin de mieux sentir le résultat en terme de puissance et de vibration. Pour les utilisateurs ayant des alim. de 24 ou 30v vous verrez que la puissance devient vite très très importante dès que vous augmentez un peu Kp (personnellement, il me faut un effort très important pour arrêter le T500 lancé à 2°/sec !!... et sans la moindre vibration. (On dirai des moteurs continus).
Dernier conseil, ne pas utiliser les fonctions d'amortissement des vibrations avec les filtres en réglage fréquentiel... j'ai fait pas mal d'essais la dessus... de mon expérience, ça n'apporte rien au final. Il vaut mieux de pas régler trop fort Kp et vous n'aurez pas de vibration.
|
|
|