L'AXE DE DÉCLINAISON
GENERALITES
Cet axe est secondaire dans une monture équatoriale
étant donné qu'il reste fixe en suivi sidérale. On n'entraîne cet axe en
rotation que lors des pointages. Mais il présente un rôle important si l'on
souhaite réaliser de longues poses photographiques au foyer du télescope : il
est alors parfois nécessaire d'effectuer des corrections en déclinaison si la
mise en station est défaillante.
D'autre part, il faut bien sûr éviter toute flexion de
l'arbre sous le poids du tube optique.
Dans notre cas, le tube optique est déposé dans un
berceau en bois (renforcé par des plaques d'aluminium). Ainsi l'axe de
déclinaison se compose de 2 arbres de diamètre 20 mm fixées efficacement sur
le berceau et qui sont en rotation dans 2 paliers installés sur la fourche.
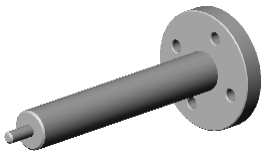
schéma CAO des 2 arbres qui ont été usinés :
 |
 |
| arbre en
aluminium dural (usiné en 1 seul bloc)
Le diamètre est réduit à 6 mm en
bout d'arbre pour la mise en position du codeur optique à arbre creux.
(voir plus loin) |
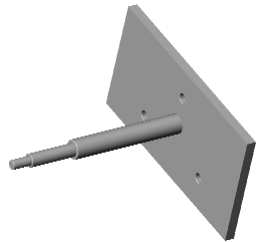
arbre en
acier Stub monté serré (à la presse) dans une plaque d'aluminium de 10
mm d'épaisseur
arbre positionné du coté du
système d'entraînement (roue et vis sans fin)
différents diamètres usinés
ajustés aux alésages de la roue et de la bague fixée sur le cercle
gradué. |
LA MOTORISATION
De même que pour l'axe d'ascension droite nous
voulions disposer d'un système d'entraînement non limité en rotation
par une arrivée en fin de course comme c'est le cas avec le système bras
tangent. Cette volonté étant liée au fait de pouvoir effectuer une recherche
automatique d'objets célestes à l'aide d'un PC.
Le choix a été d'employer un système roue et vis sans
fin. Les avantages sont nombreux : cet ensemble mécanique crée un rapport de
réduction intéressant (en l'occurrence 1/50) qui permet d'éviter l'ajout d'un
réducteur sur le moteur (économie substantielle) et il est possible de régler
l'orientation du tube soit par rotation du moteur, soit directement à la main
en tournant une molette, les 2 accessoires étant montés sur l'axe de la vis
sans fin
|

|
photos des différents composants
de ce système d'entraînement :
La roue dentée (50 dents) , la vis
sans fin et l'axe qui la traverse , le joint de cardan pour la
transmission avec le moteur. (il
s'agit d'un moteur pas à pas 200 pas de qualité réduite par rapport à
celui de l'axe horaire)
Ce qui n'apparaît qu'en partie sur
l'image est l'ensemble en aluminium qui a été usiné pour le
positionnement précis de la vis sans fin par rapport à la roue. (visible
en partie sur la photo suivante) |
|

|
Cette photo fait apparaître
en partie le système de motorisation en déclinaison :
On aperçoit l'arbre, le palier, la roue, la molette de réglage liée
à la vis sans fin et le disque gradué.
Au niveau du palier
un système avec 3 vis de serrage à 120° permet de faire en sorte que
l'axe "tourne le plus rond possible".
On remarque également le moteur fixé sur une plaque d'aluminium à
l'arrière de la fourche.
|
LE FREINAGE
 |
Même si le système roue
et vis sans fin est un système irréversible qui empêche toute rotation
du tube à moins de visser ou dévisser la vis sans fin, il reste
néanmoins un jeu important particulièrement gênant en extrémité de
tube.
Nous avons donc usiné un frein (schéma CAO
ci-contre) qui permet le serrage d'arbre de déclinaison en jouant sur
l'élasticité de l'aluminium. Ainsi, on peut manœuvrer aisément la porte
oculaire afin de focaliser sans vibrations gênantes.
De plus lors d'un suivi il est recommandé de serrer
également ce frein, l'image est d'autant plus stable. |
MISE EN PLACE D'UN CODEUR OPTIQUE
| L'axe de déclinaison est
capital pour
la recherche d'un objet que ce soit avec un cercle gradué ou à l'aide
d'un programme informatique.
Or lors de changement de sens de rotation, il existe
un jeu assez conséquent dans le système roue et vis sans fin.
Afin de prendre en compte ce jeu dans notre logiciel
nous avons réalisé un asservissement de cet axe à l'aide d'un codeur optique
incrémental (branché globalement directement sur le port parallèle du
PC)
Le codeur retenu présente 500 incréments pour un
tour. Il est à arbre creux et est directement serré sur l'arbre usiné
(voir premier schéma CAO)
Sachant que de façon informatique on peut
multiplier par 4 le nombre d'incréments d'un codeur, la précision
obtenue est de :
360° / (4x500) = 0,18° (largement suffisant pour
nos besoins)
|

Théorie
sur les codeurs optiques incrémentaux et algorithme
|
 |
On peut observer sur
cette photo le second coté de l'axe de déclinaison avec le codeur
optique.
Entre ce codeur et le
palier, on note la présence du frein décrit précédemment. |
 |
| Retour au menu précédent |