

vaufrègesI3
-
Compteur de contenus
14 229 -
Inscription
-
Dernière visite
-
Jours gagnés
22 -
Last Connexion
Soon available - 78578
Messages posté(e)s par vaufrègesI3
-
-
Il y a 2 heures, George Black a dit :C'est une très belle étude et une belle application honnête de l'IA
Houais OK mais l'éléphant là... très mauvais exemple !!! : ça trompe énormément !!!!!
.... c'est bon j'y cours ==>
-
 6
6
-
-
-
Il y a 4 heures, biver a dit :En gros 25min après le décollage, si le starship atteint son orbite il passera au-dessus de nos tête en France... Faut juste qu'il ne rentre pas ~55min. trop tôt
 !
!
J’ai le sentiment que tout est possible avec ce bazar monstrueux encore mal ficelé.Perso je serais résident salarié à la starbase de Boca Chiqué, le 17 je prendrais mon RTT !
-
4
-
-
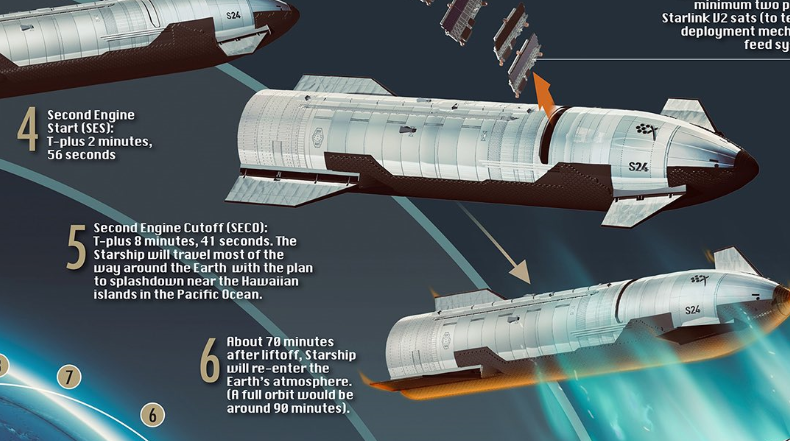
Cette infographie est plus explicite..
Agrandir
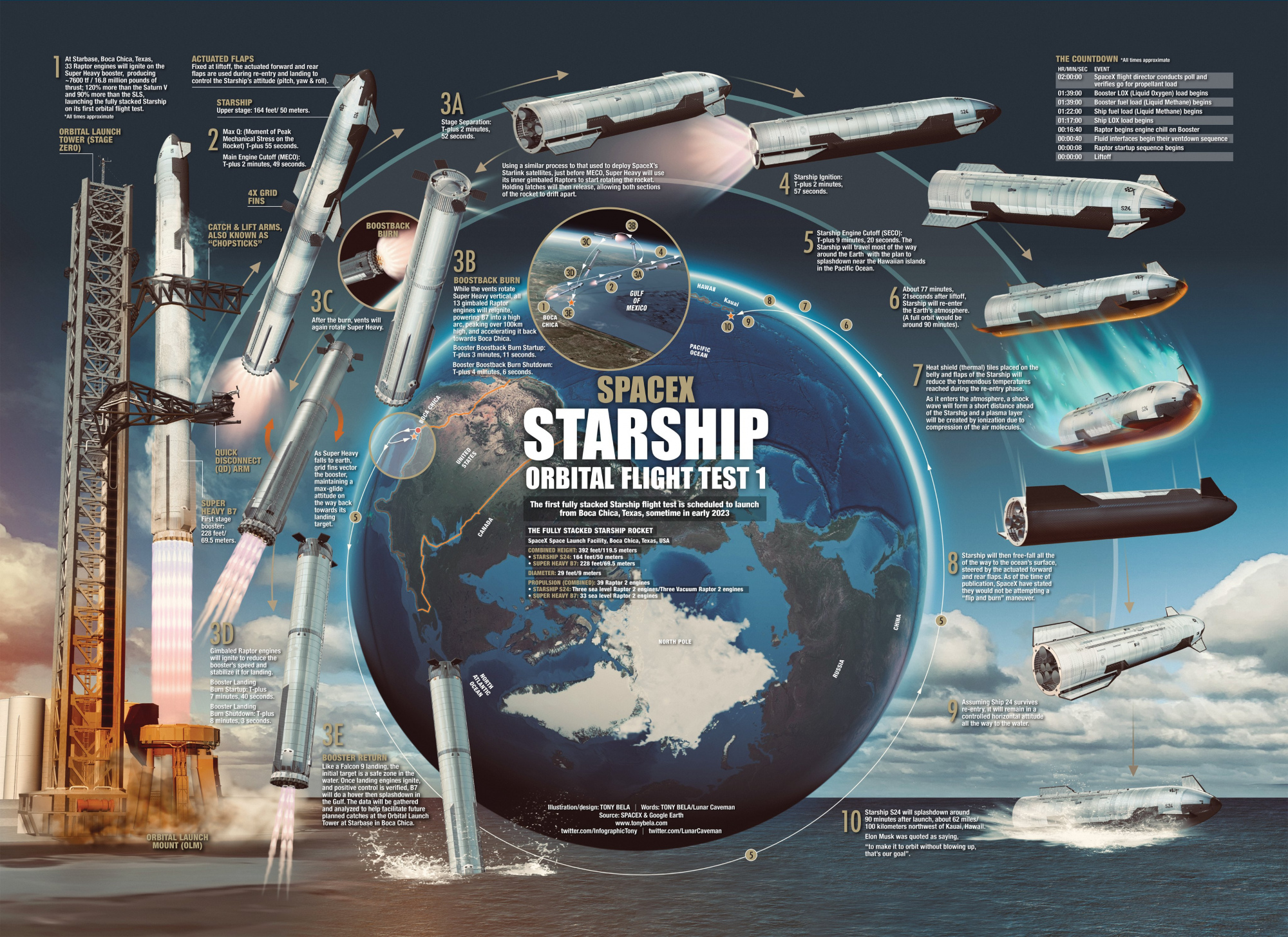
Noter que la Starship va donc se vautrer sans ralentir dans l'océan Pacifique et exploser sans espoir de récupération pour examen (à moins qu'elle soit déjà détruite lors de la rentrée atmosphérique, ce qui demeure une forte probabilité à ce stade)
Extrait du rapport de la FAA
https://www.faa.gov/media/27236
Exposition aux matières dangereuses
SpaceX s'attend à ce que le LOX et le méthane résiduels restent à bord du Starship et du Super Heavy pendant la descente et l'atterrissage. Contrairement aux autres propergols et carburants des lanceurs, le LOX et le méthane ne sont pas des polluants toxiques.
Comme Super Heavy resterait intact, le propergol résiduel serait conservé et ne serait pas rejeté dans l'océan, mais il pourrait éventuellement se réchauffer, se transformer en gaz et s'échapper dans l'atmosphère par des vannes ouvertes.Lors du premier lancement, Starship devrait subir une explosion au moment de l'impact avec la surface de l'océan.
Comme tout le carburant liquide est susceptible d'être consommé lors de la désintégration du véhicule, seules les structures de l'habitacle seront détruites.Si Starship n'est pas configuré pour survivre à une rentrée atmosphérique, le véhicule tomberait et se briserait lors de sa descente dans l'atmosphère, et le carburant résiduel se dissiperait dans l'atmosphère, de sorte qu'il ne resterait que les débris structurels.
-
 1
1
-
 4
4
-
-
13 avril 2023
Curiosity bénéficie d'une importante mise à jour logicielle
Curiosity roulera plus vite et réduira l'usure de ses roues grâce à deux des nouvelles fonctionnalités incluses dans une importante mise à jour logicielle qui s'est achevée le 7 avril.
Après des années de préparation, une importante mise à jour logicielle installée sur Curiosity permettra au robot martien de rouler plus vite et de réduire l'usure de ses roues. Il ne s'agit là que de deux des quelque 180 changements mis en œuvre lors de la mise à jour, qui a obligé l'équipe à suspendre les opérations scientifiques et d'imagerie de Curiosity entre le 3 et le 7 avril.
"Le logiciel de vol est essentiel à notre mission, c'est donc un événement majeur pour notre équipe", a déclaré Kathya Zamora-Garcia, responsable du projet Curiosity au Jet Propulsion Laboratory . "Il s'agit d'une mise à jour logicielle majeure, et nous devions nous assurer que nous la faisions correctement".
La planification de cette mise à jour remonte à 2016, date de la dernière révision du logiciel de Curiosity. Cette fois-ci, certains changements sont aussi minimes que les corrections apportées aux messages que le rover envoie aux contrôleurs de la mission sur Terre. D'autres simplifient le code informatique qui a été modifié par de nombreux correctifs depuis l'atterrissage de Curiosity en 2012. Les changements les plus importants permettront à Curiosity de fonctionner plus efficacement dans les années à venir.
Le rover peut désormais faire davantage ce que l'équipe appelle "penser en conduisant", ce que le nouveau rover martien, Perseverance, peut faire d'une manière plus avancée pour naviguer autour des rochers et des pièges à sable. Lorsque Perseverance roule, il prend constamment des photos du terrain à venir, qu'il traite avec un ordinateur spécialisé afin de pouvoir naviguer de manière autonome pendant un trajet continu.
Curiosity n'a pas d'ordinateur dédié à cet effet. Au lieu de cela, il roule par segments, s'arrêtant pour traiter les images du terrain après chaque segment. Cela signifie qu'il doit démarrer et s'arrêter à plusieurs reprises au cours d'un long trajet. Le nouveau logiciel aidera le vénérable rover à traiter les images plus rapidement, ce qui lui permettra de passer plus de temps en mouvement.
"Cela ne permettra pas à Curiosity de rouler aussi vite que Perseverance, mais au lieu de s'arrêter pendant une minute entière après un segment de conduite, nous ne nous arrêterons que quelques instants", a déclaré Jonathan Denison du JPL, chef de l'équipe d'opérations techniques de Curiosity. "Le fait de passer moins de temps au ralenti entre les segments de conduite signifie également que nous consommons moins d'énergie chaque jour. Et même si nous avons presque 11 ans, nous continuons à mettre en œuvre de nouvelles idées pour utiliser une plus grande partie de l'énergie disponible pour des activités scientifiques".
Usure des roues
L'équipe souhaite également préserver la santé des roues en aluminium de Curiosity, qui ont commencé à montrer des signes de rupture de la bande de roulement en 2013. Lorsque les ingénieurs se sont rendu compte que des rochers pointus usaient les bandes de roulement, ils ont mis au point un algorithme destiné à améliorer la traction et à réduire l'usure des roues en ajustant la vitesse du rover en fonction des rochers sur lesquels il roule.
Le nouveau logiciel va plus loin en introduisant deux nouvelles commandes de mobilité qui réduisent la proportion de manœuvres de directions que Curiosity doit effectuer lorsqu'il roule en arc de cercle vers un point de repère spécifique. En réduisant la sollicitation de la direction, l'équipe peut atteindre plus rapidement l'objectif de conduite et réduire l'usure inhérente.
"Cette capacité a été imaginée à l'époque de Spirit et d'Opportunity", a déclaré M. Denison. "Il s'agissait d'une option intéressante qu'il a été décidé de ne pas mettre en œuvre.
Dans l'ensemble, le nouveau logiciel simplifiera la tâche des pilotes humains de Curiosity, qui doivent rédiger des plans complexes contenant des centaines de commandes. La mise à jour du logiciel leur permettra également de télécharger des correctifs plus facilement que par le passé. Enfin, elle aidera les ingénieurs à planifier plus efficacement les mouvements du bras robotique de Curiosity et à orienter sa "tête" au sommet du mât avec plus de précision.
Comme pour toute mise à jour logicielle importante, il y a un sentiment de soulagement de voir qu'elle fonctionne comme prévu, a déclaré Denison.
"L'idée d'appuyer sur le bouton d'installation était un peu effrayante", a-t-il ajouté. "Malgré tous nos tests, nous ne savons jamais exactement ce qui va se passer tant que le logiciel n'est pas installé".
Source : https://mars.nasa.gov/news/9378/nasas-curiosity-mars-rover-gets-a-major-software-upgrade/?site=msl
-
1
-
 2
2
-
4
-
-
Le 12 avril petit parcours de réajustement de position vers la cible initiale
Écrit le 12 avril par Michelle Minitti, géologue planétaire (c’est moi qui surligne) :
"… le terrain sur lequel naviguent les conducteurs de notre rover est difficile - du sable glissant entourant de gros rochers qui n'acceptent pas les roues. Ces terrains contrastés ont contribué à ce que nous n'arrivions pas tout à fait à l'espace de travail prévu" - [déplacement du sol 3796 - 11 avril].
"Mais les textures intéressantes de l'espace de travail et du terrain environnant ont motivé l'équipe scientifique à ne pas trop s'éloigner de cette zone. Les conducteurs du rover ont donc planifié un petit saut vers une autre roche intrigante" [déplacement de 7 mètres au sol 3797 - 12 avril].
"Un motif de "fracture festonnée" est présent sur le bloc nommé "Regina" vers lequel nous nous dirigeons. ChemCam a ciblé un autre bloc de fracture festonnée, « Chiles », avec sa seule analyse LIBS prévue. Plus loin, Mastcam capturera le côté ouest de la butte "Owenteik".
Écrit le 13 avril par Lauren Edgar, géologue planétaire (c’est moi qui surligne) :
"Curiosity est prêt à examiner en détail la prochaine unité stratigraphique de ce petit canyon. Depuis que nous avons quitté la bande de marquage "d'Amapari" nous avons acquis un grand nombre d'excellentes cibles scientifiques au contact pour rechercher des changements dans la chimie. Pour ce faire, nous devons d’abord balayer la poussière à l'aide de l'outil de dépoussiérage, puis utiliser les techniques APXS, MAHLI, ChemCam et Mastcam multispectrale pour obtenir un aperçu détaillé de la taille des grains et de la composition des différentes unités au fur et à mesure que nous progressons dans la vallée.
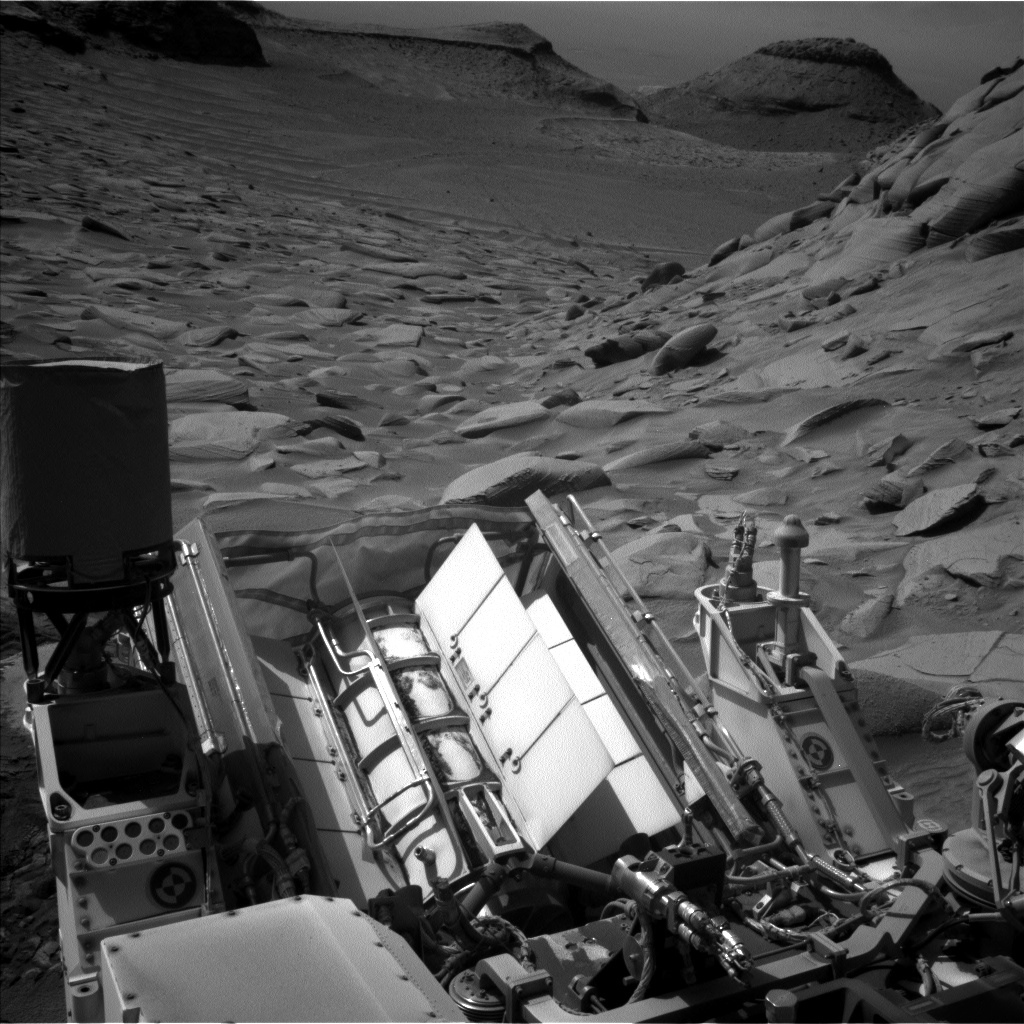
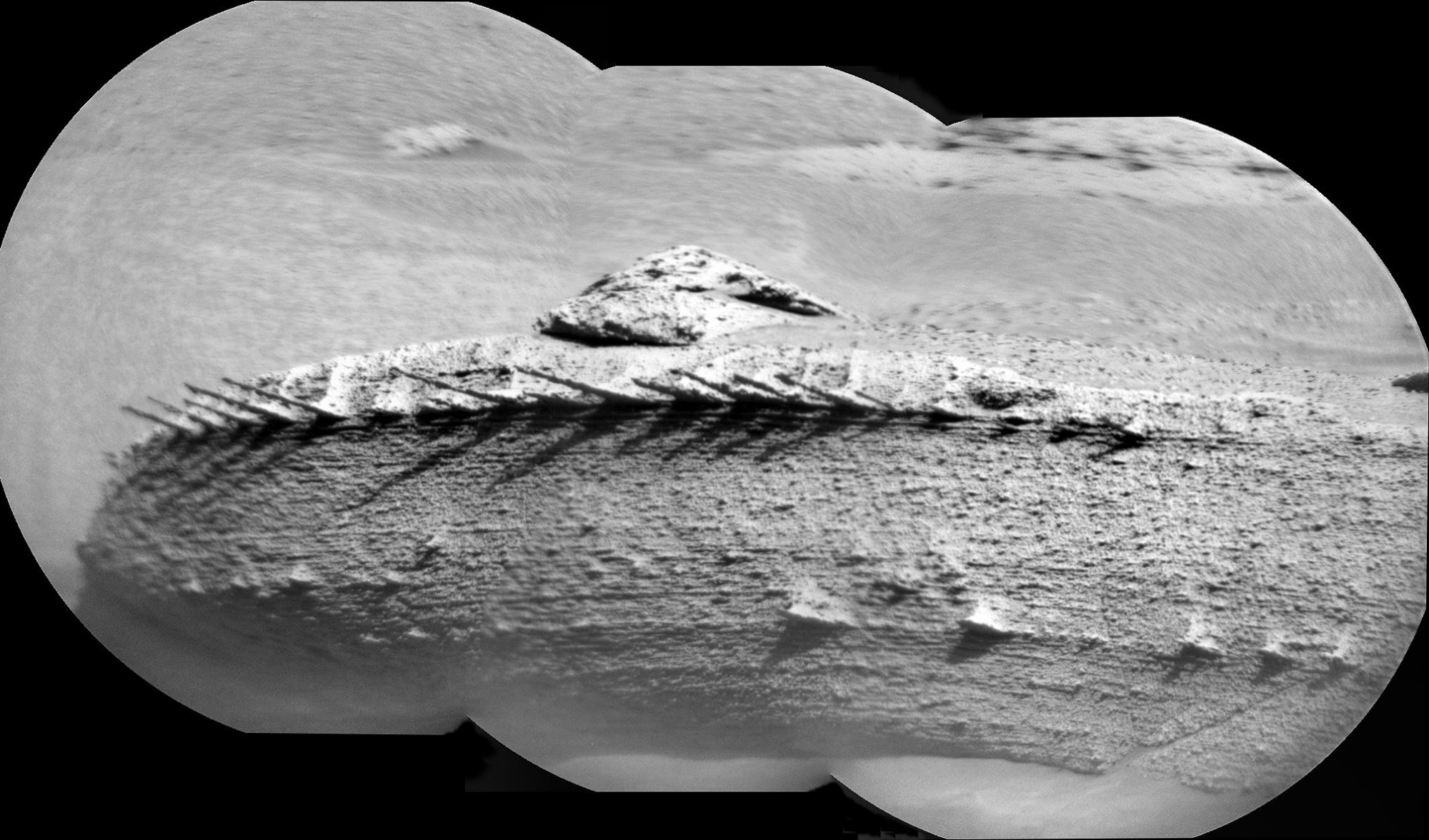
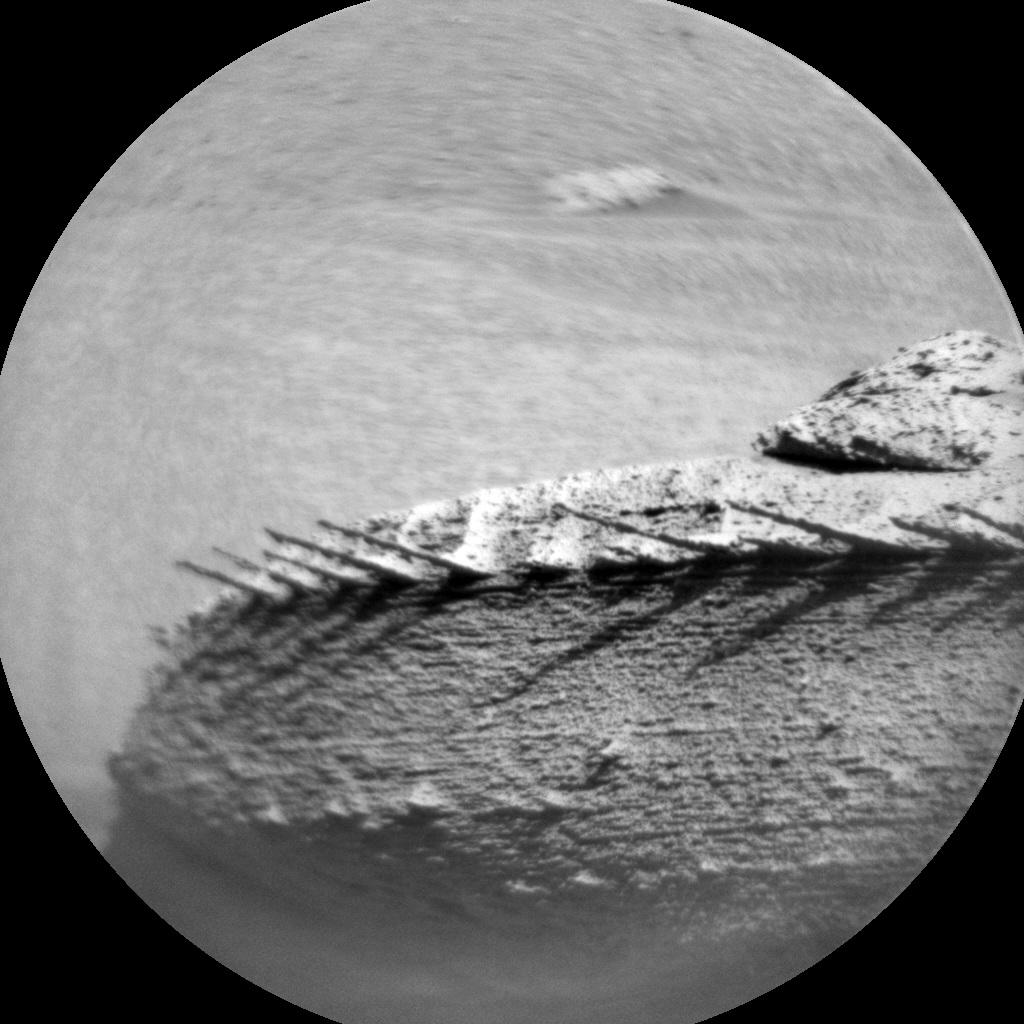
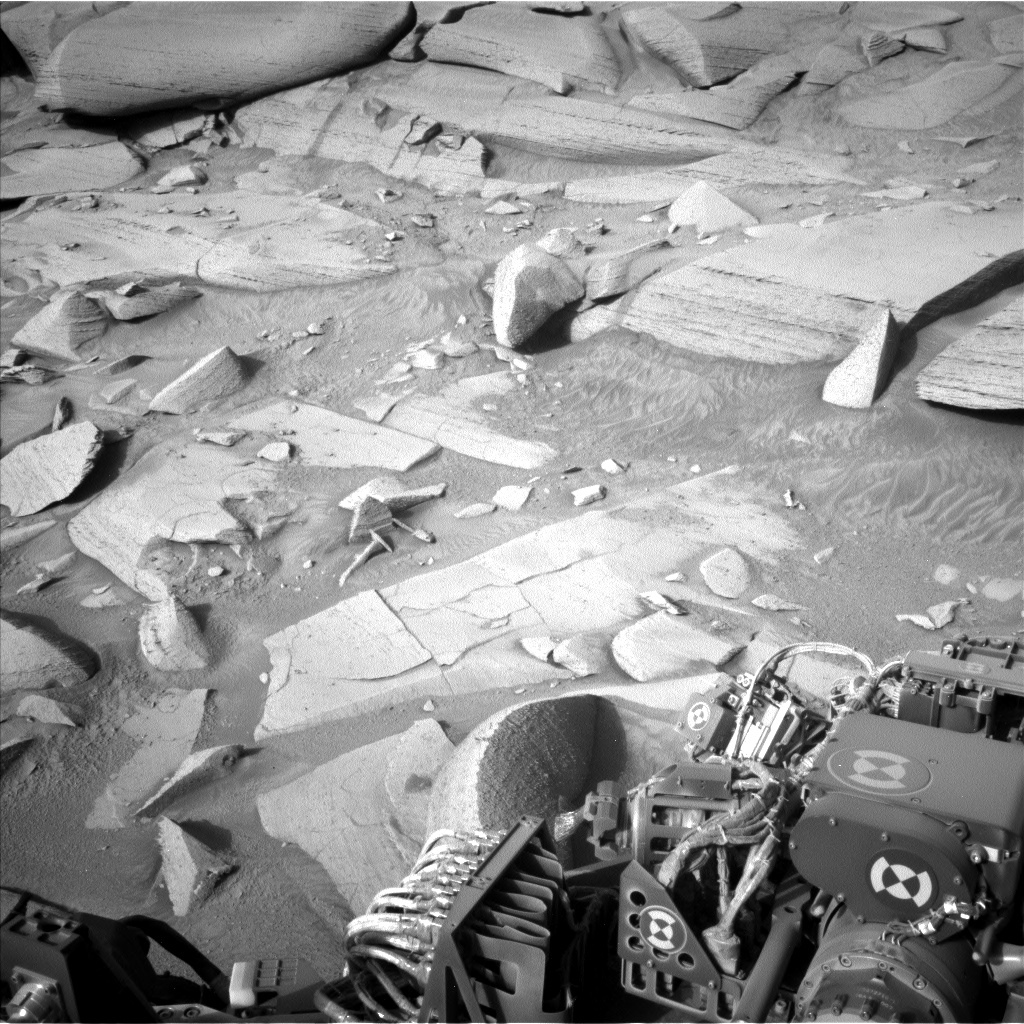
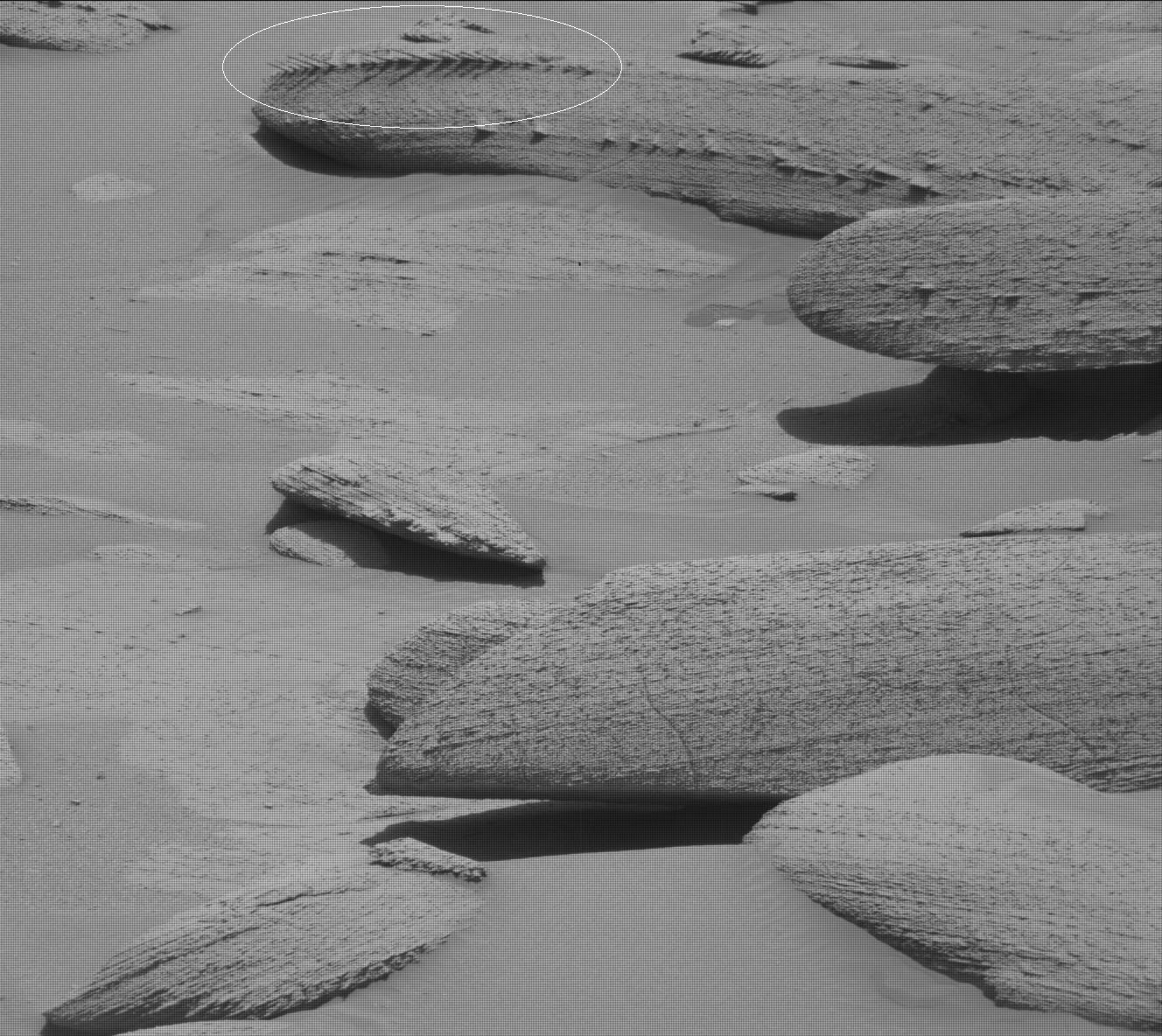
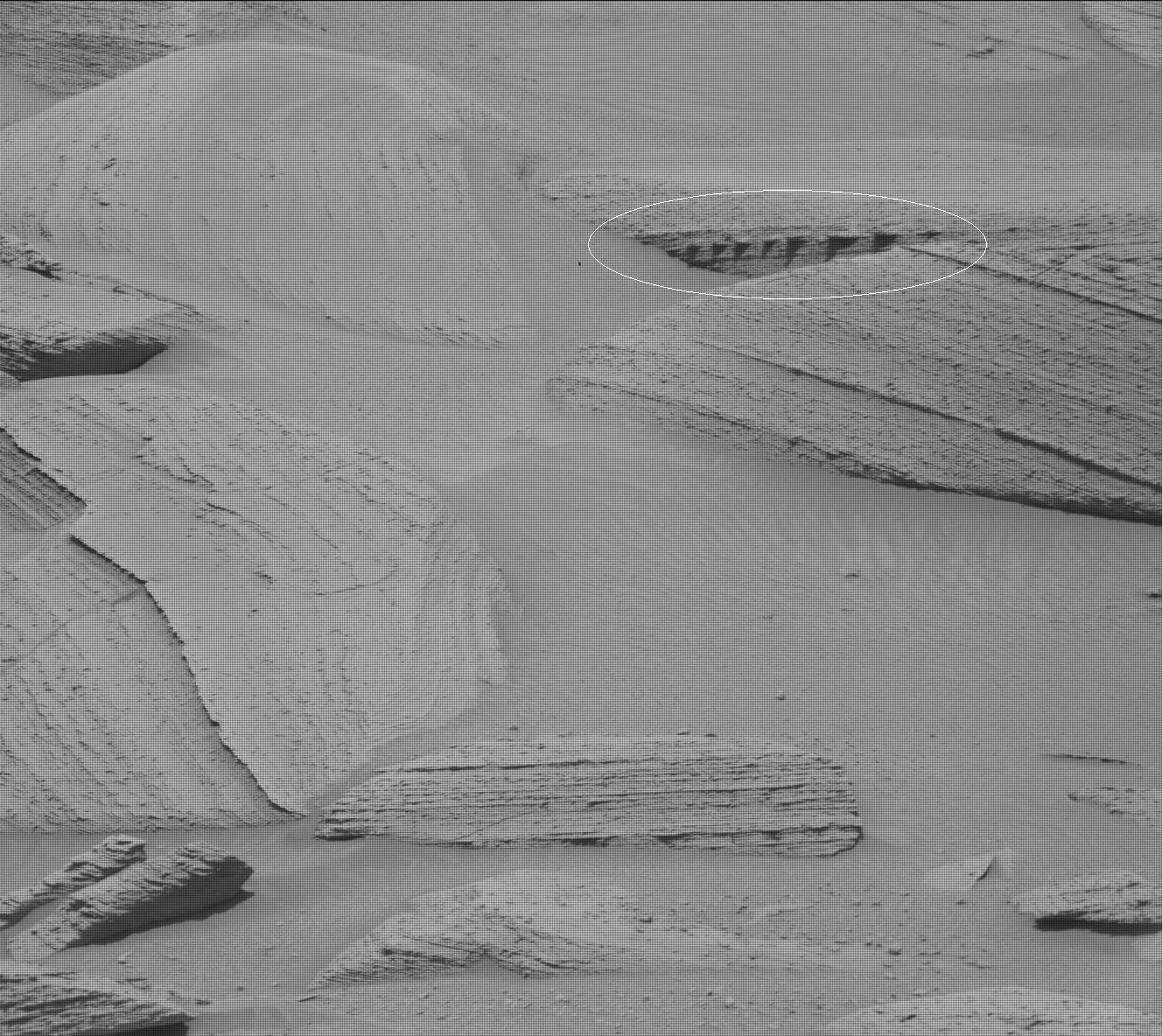
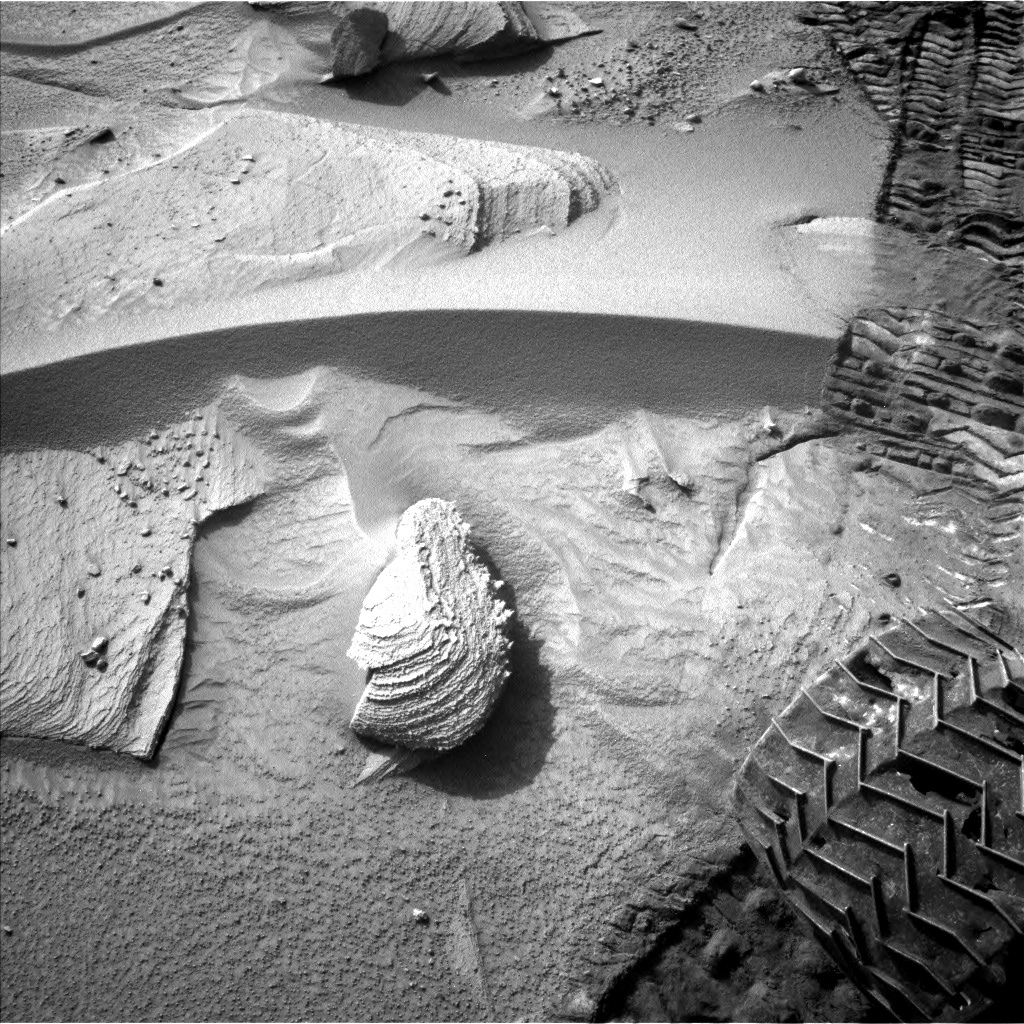
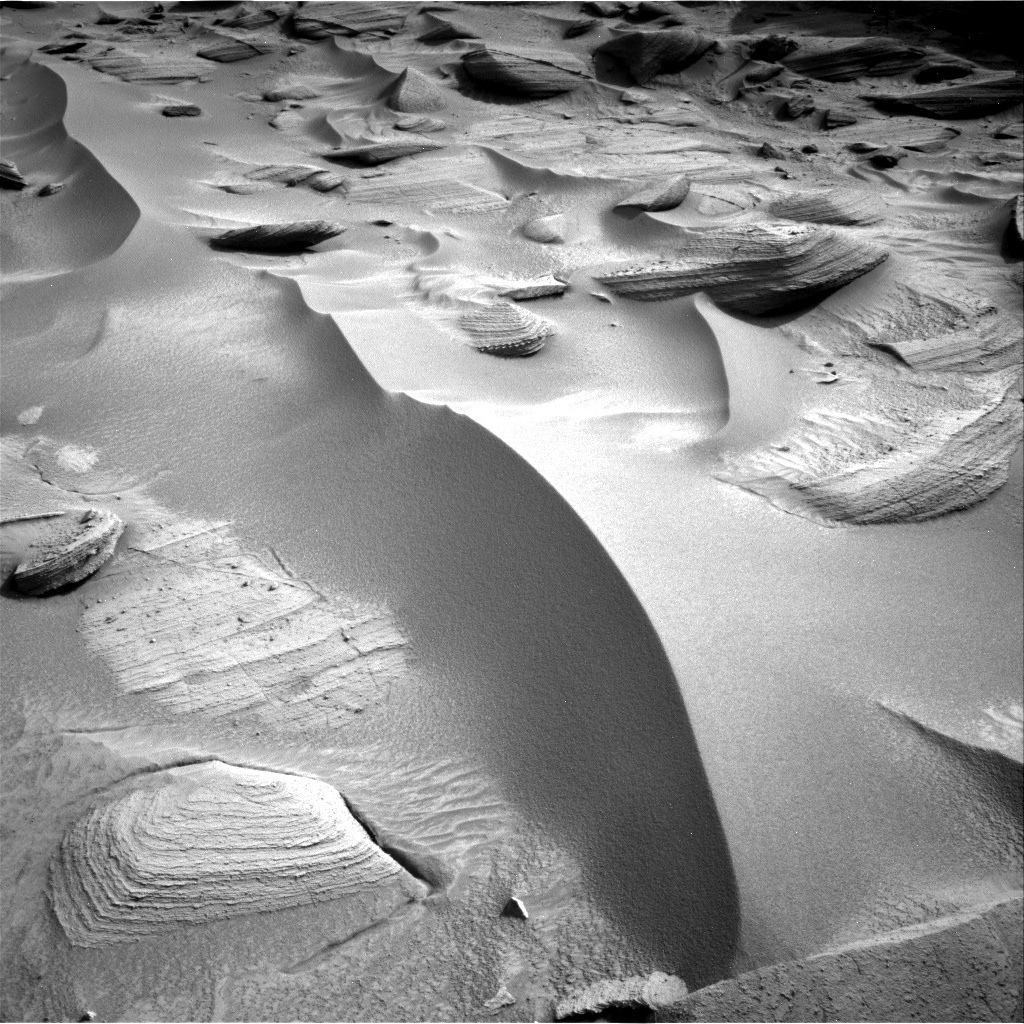
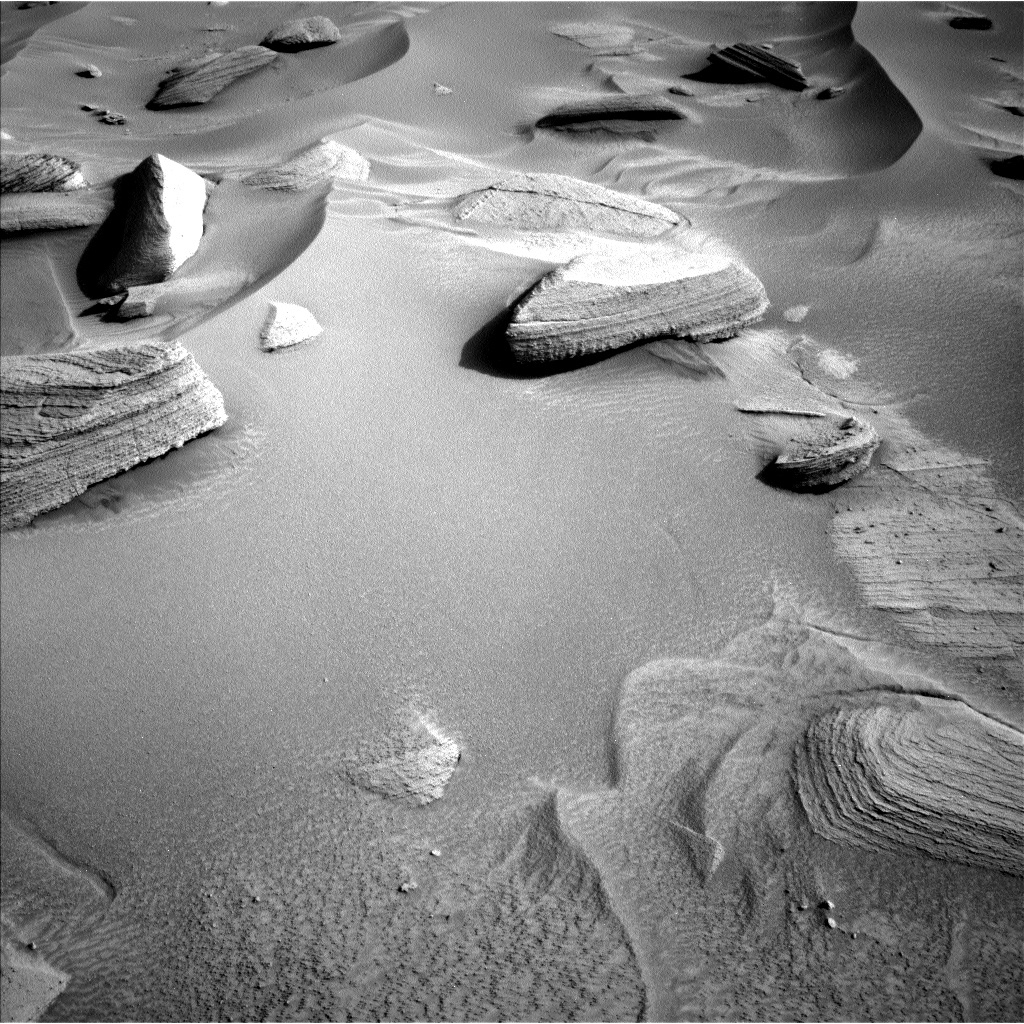
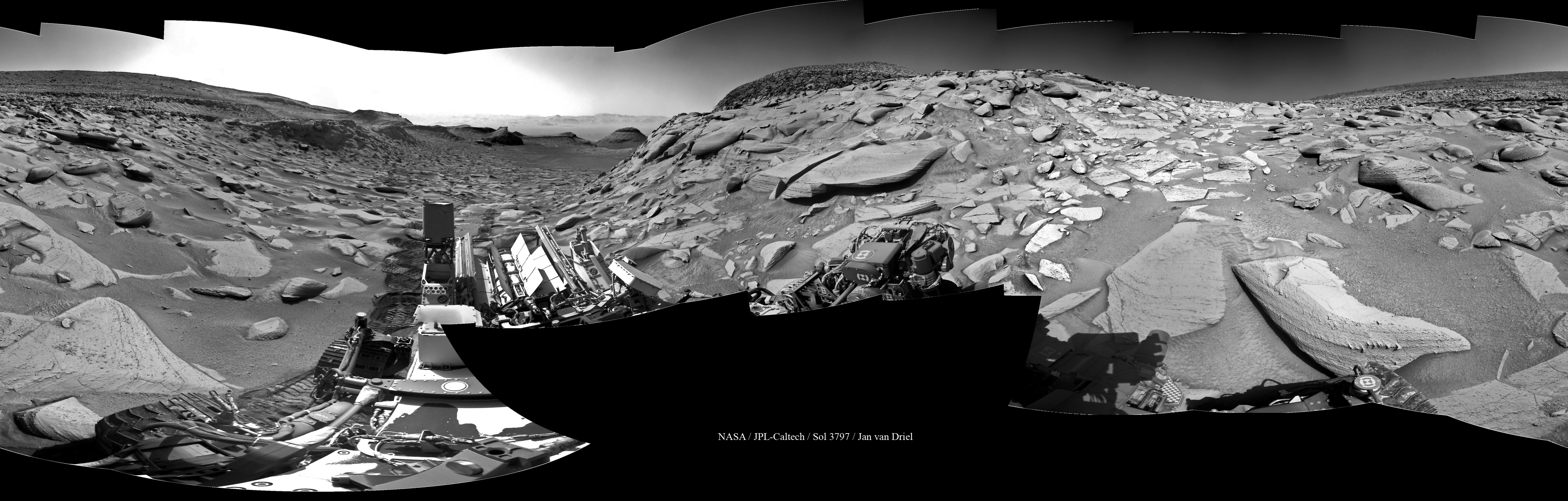
Plusieurs mosaïques Mastcam sont prévues afin d’étudier la stratigraphie locale, ainsi que les nodules résistants dans ces roches. Certains de ces nodules ventifiés (façonnés par le vent) ressortent en relief positif avec des morphologies qui ont été comparées en plaisantant à des ailerons ou à des "dents de requin" (dans le coin inférieur droit de l'image Navcam ci-dessous)".
NAVCAM – 12 AVRIL 2023 SOL 3797) :
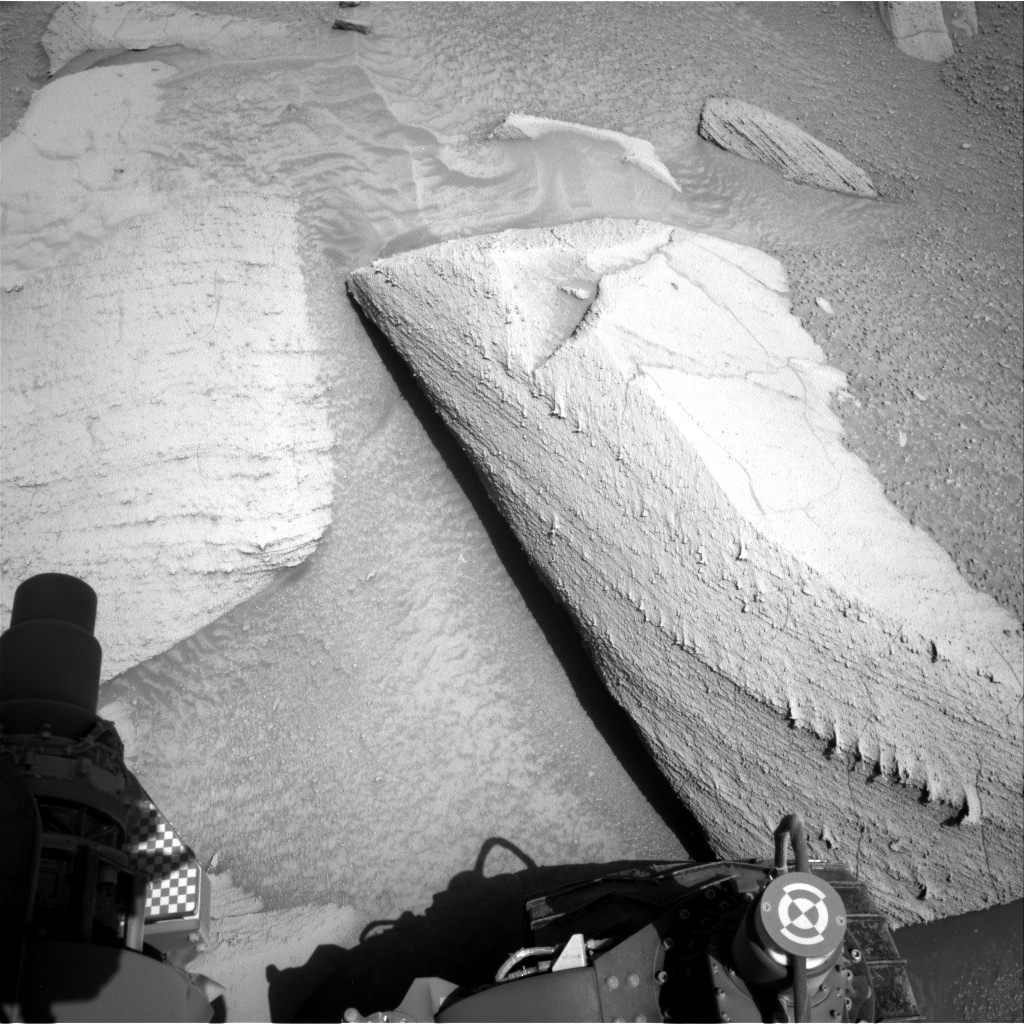
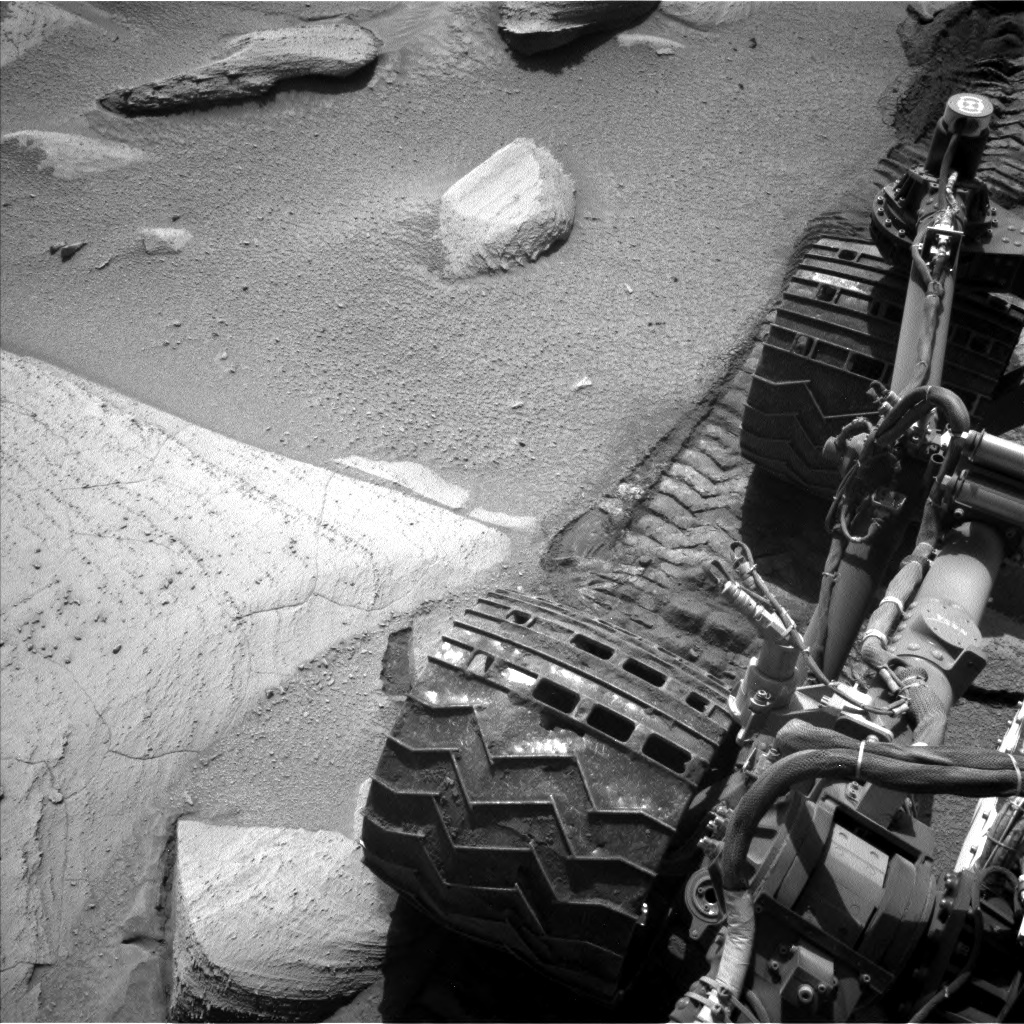
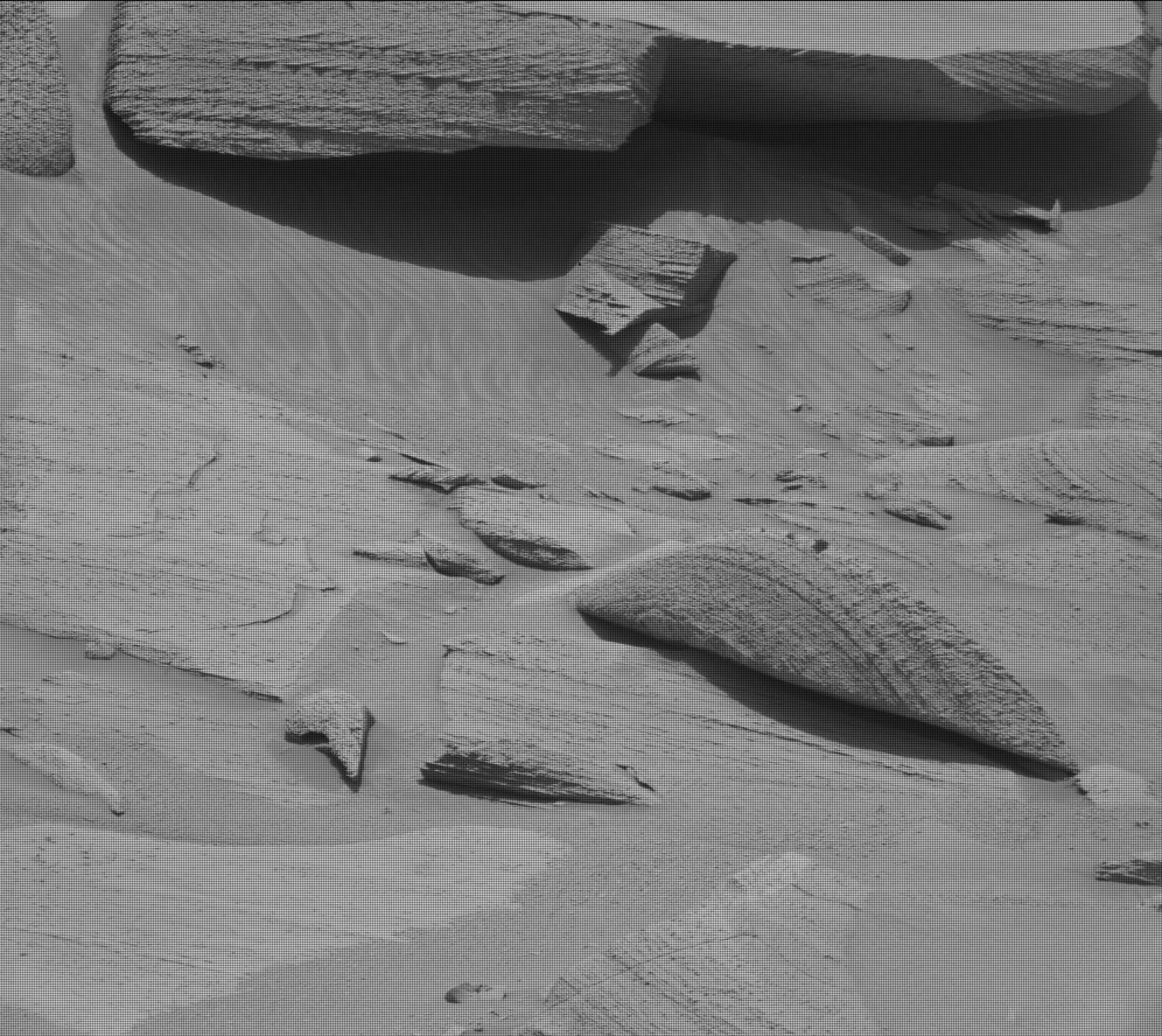
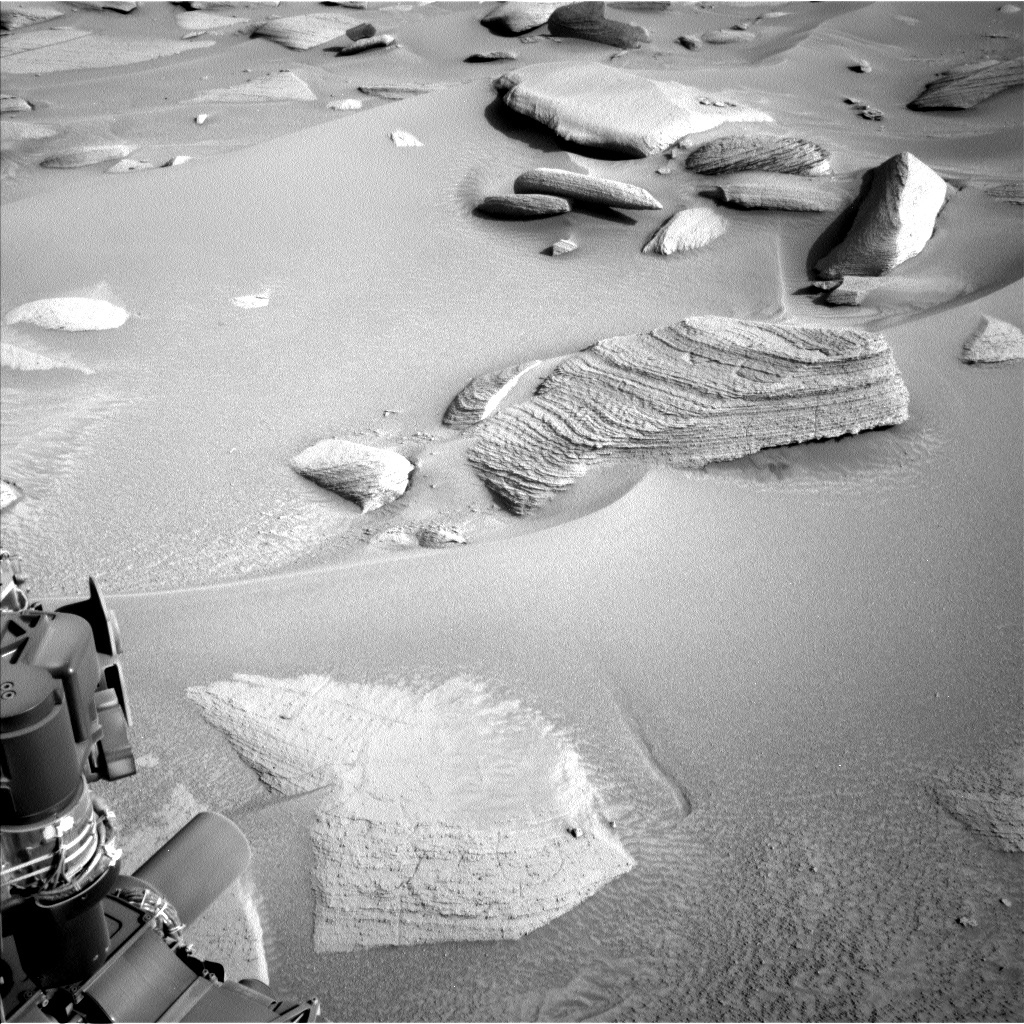
"Nous aimerions bien mordre dans ces rochers pour voir de quoi ils sont faits ! Nous allons donc dégager une nouvelle surface de roche avec le DRT sur une cible nommée "Cupixi" (le bloc rocheux à droite de l'image ci-dessous, face au rover)" :
NAVCAM – 12 AVRIL 2023 SOL 3797) :
Face à la cible "Cupixi"
"… puis nous ferons une imagerie MAHLI, avant d'utiliser APXS et ChemCam pour étudier la composition. La Mastcam effectuera également une observation multispectrale de "Cupixi". En plus des observations à Cupixi, ChemCam étudiera une cible nommée "Pico do Trocoa" pour examiner ces nodules plus en détail, et MAHLI acquerra une mosaïque pour évaluer la taille des grains et la stratification dans une couche formant les "dents de requin".
Plus tard Curiosity effectuera un parcours pour monter plus haut dans ce canyon et découvrir les autres unités fascinantes qui se trouvent au-dessus".
POSITION AU 12 AVRIL 2023 (SOL 3797) – kymani76 :
Petit déplacement d'environ 7 mètres pour atteindre la cible "Cupixi"

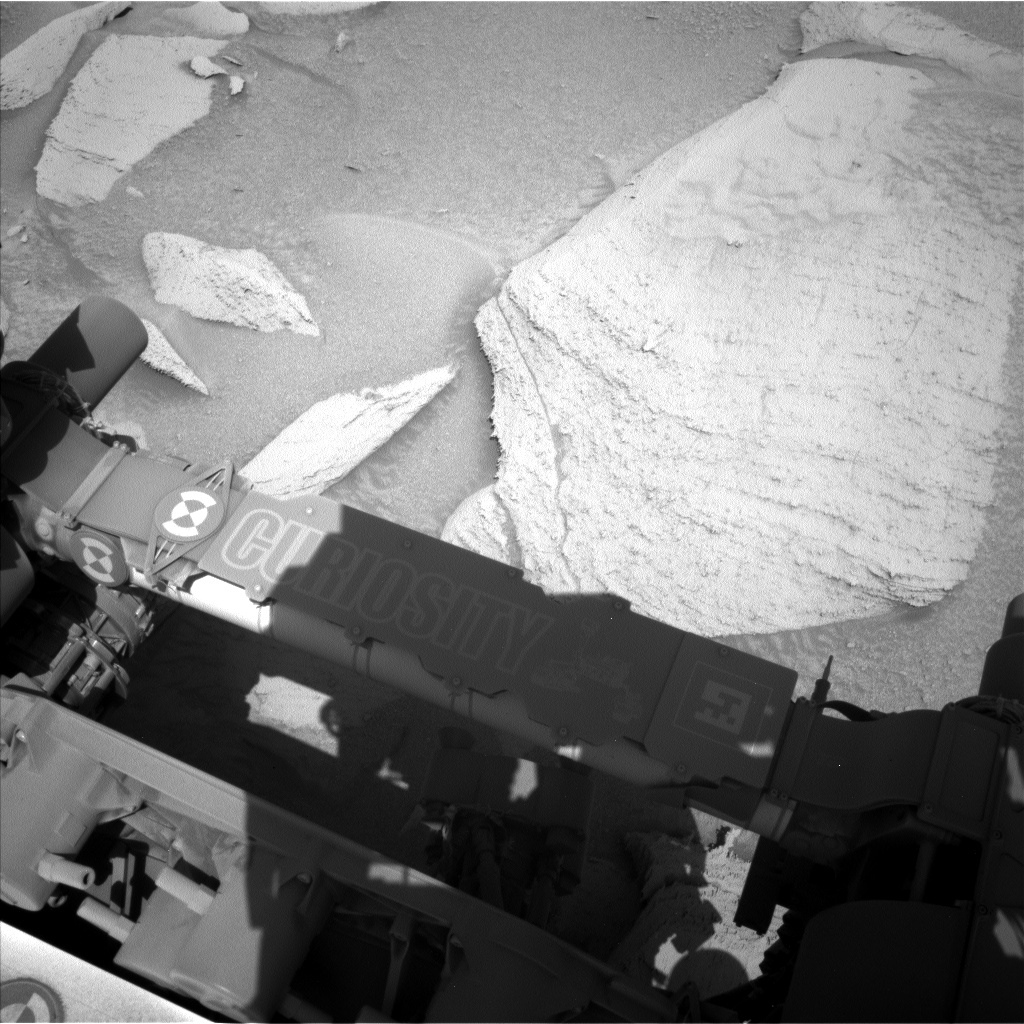
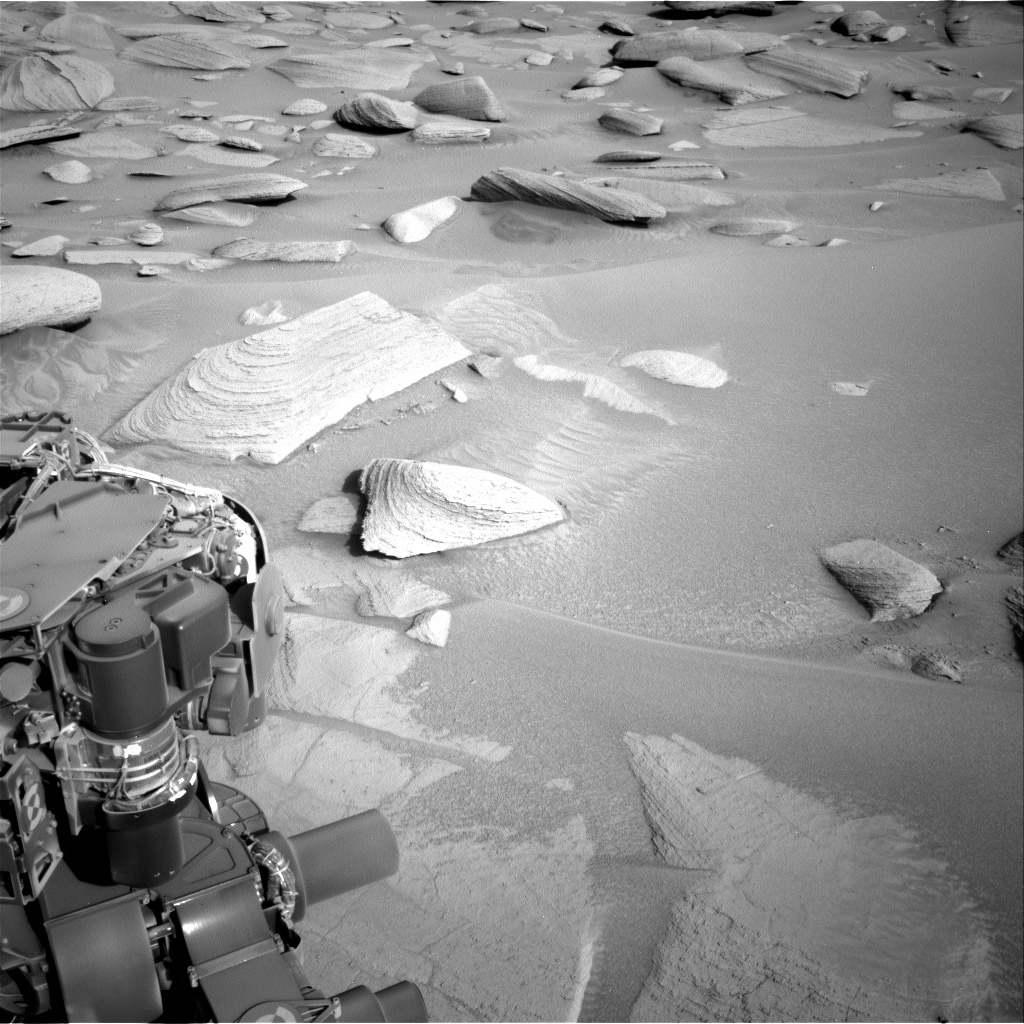
HAZCAM AVANT - 12 AVRIL 2023 (SOL 3797) :
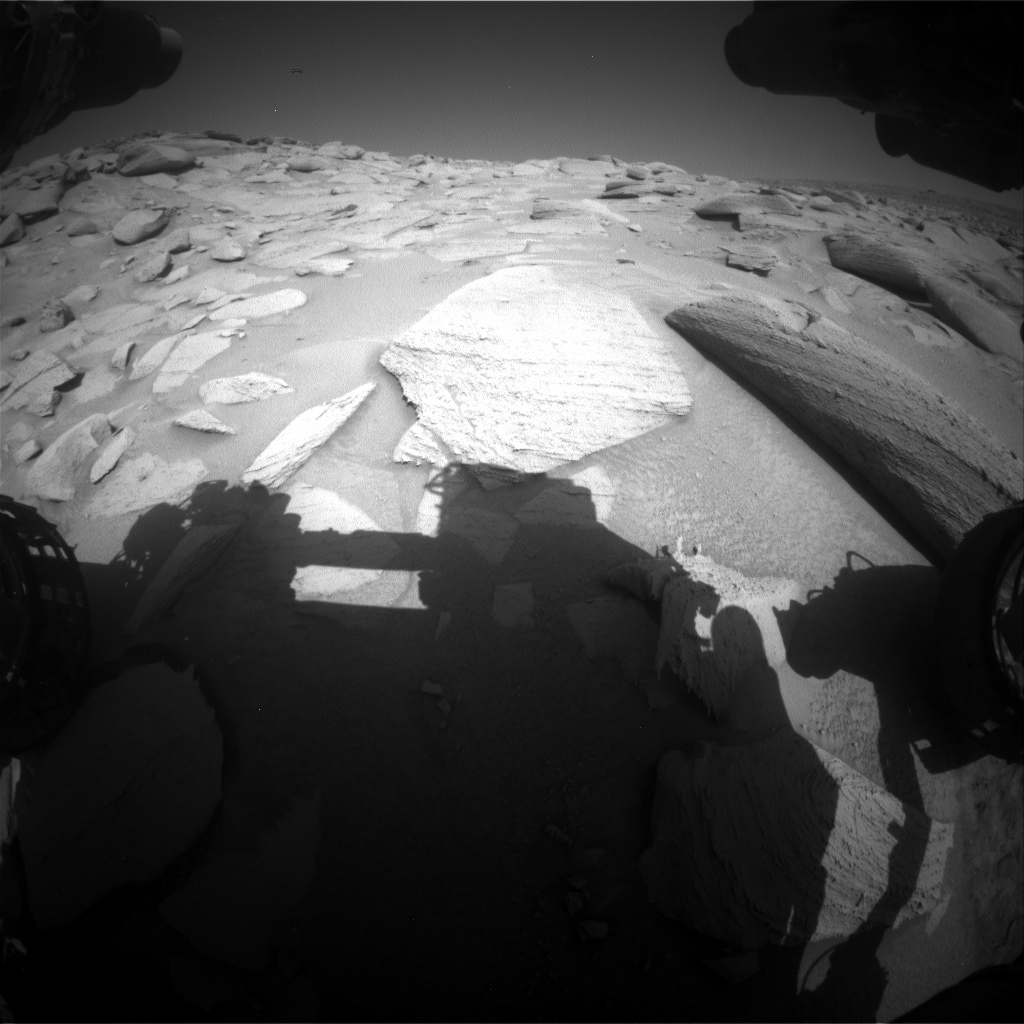
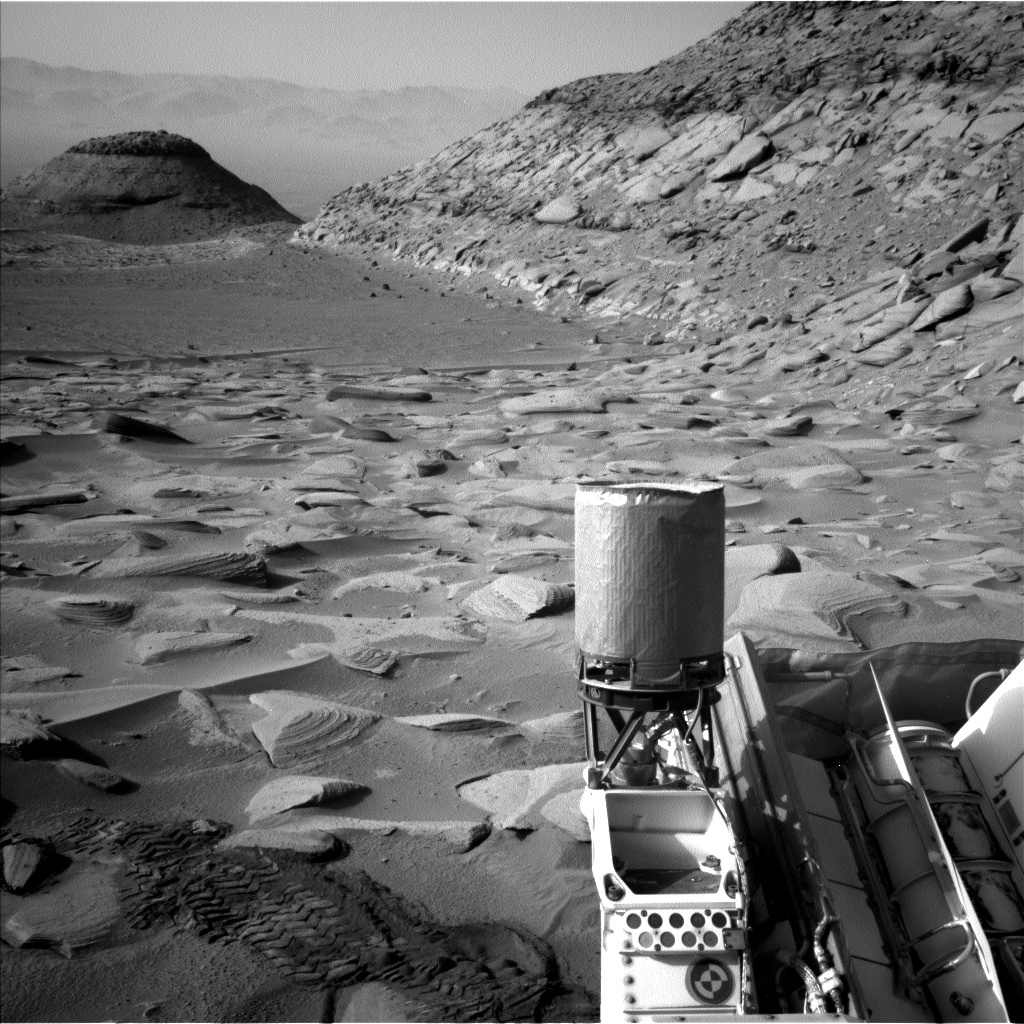
NAVCAM – 12 AVRIL 2023 SOL 3797) :
Toujours aussi compliqué de devoir chevaucher ce chaos de blocs

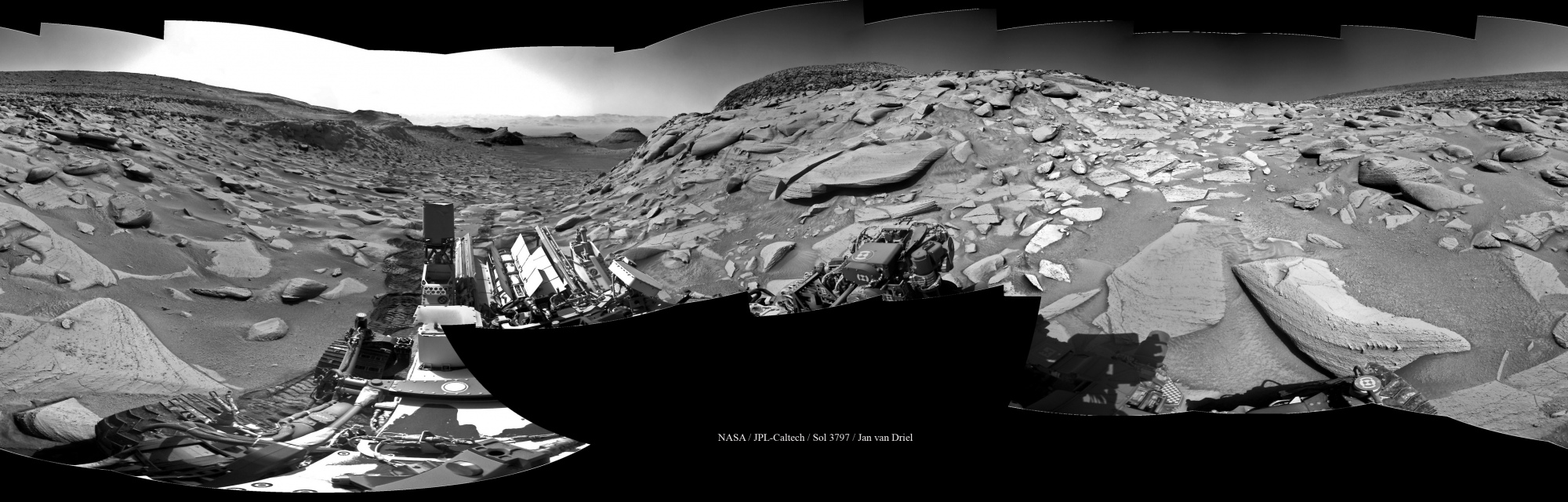
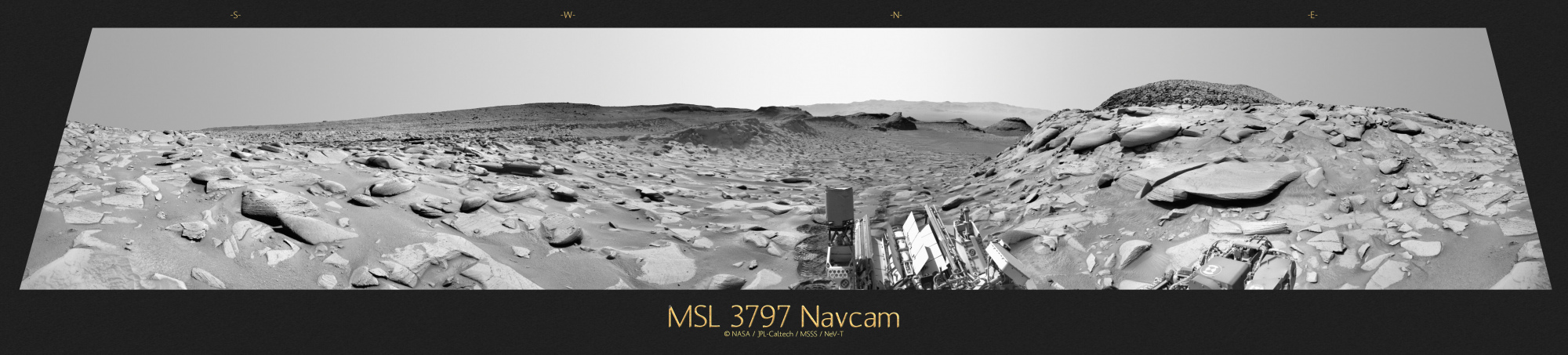
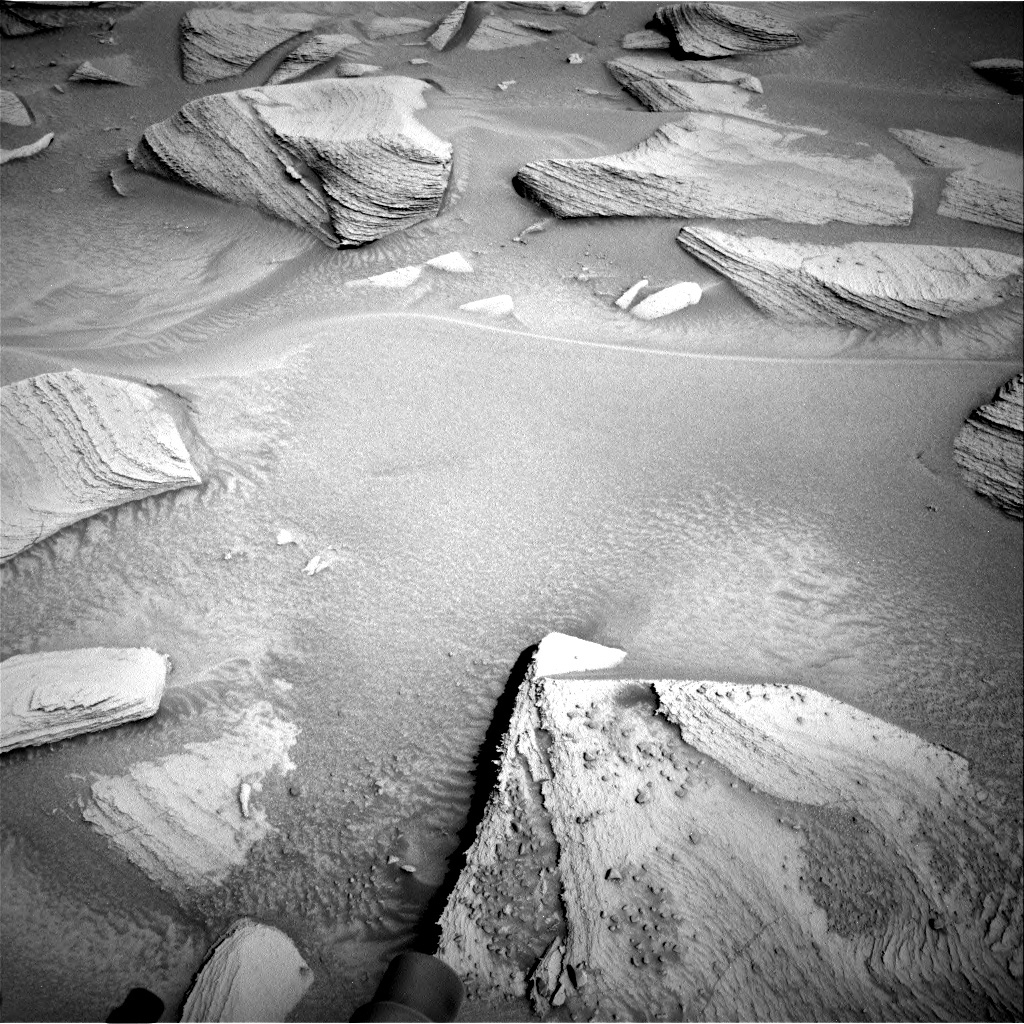
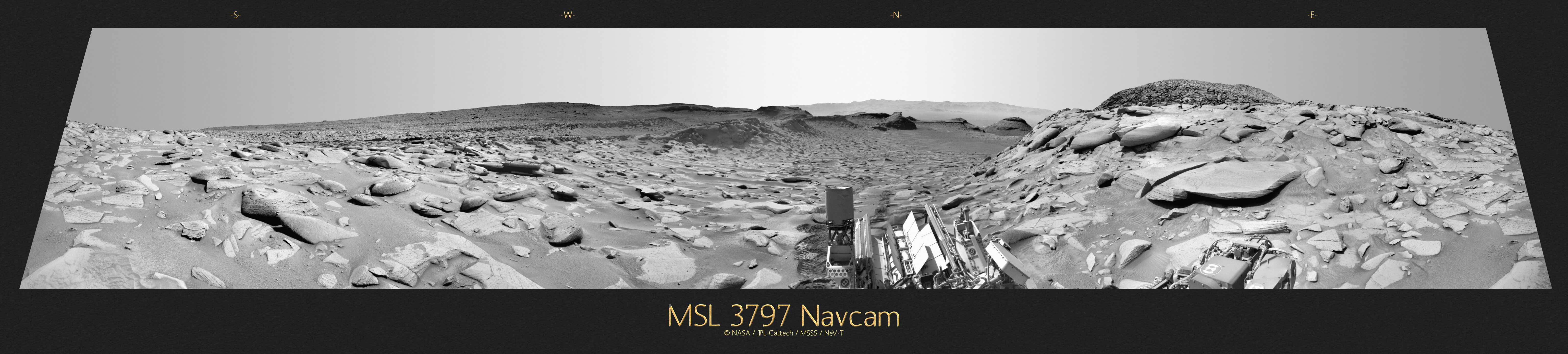
Curiosity longe le côté ouest de la petite butte "Owenteik".
PANOS NAVCAM - 12 AVRIL 2023 SOL 3797) :
Jan van Driel
Neville Thompson
Gigapan : http://www.gigapan.com/gigapans/232180
NAVCAM - 13 AVRIL 2023 SOL 3798) :
Brossage de le cible "Cupixi"

Tentative de brossage des "dents" (qui aurait cru que Curiosity brosserait des dents sur Mars ??

 ) et imagerie MAHLI :
) et imagerie MAHLI :

-
1
-
6
-
-
Mise à jour du logiciel réussie et terminée !
Écrit le 10 avril 2023 par Scott VanBommel, planétologue :
"… notre rover bien-aimé a passé une bonne partie de la semaine dernière à effectuer une mise à jour logicielle tandis que l'équipe scientifique se réunissait virtuellement pour synthétiser et discuter des résultats. Cette mise à jour a été effectuée avec succès et Curiosity s'est remis au travail pour caractériser un canyon local afin d'étudier la composition et la sédimentologie des unités géologiques situées au-dessus de "Tapo Caparo". Tout en restant à l'affût de son prochain site de forage, Curiosity effectuera régulièrement des analyses chimiques et texturales des roches le long de sa traversée du canyon."
FIN DE CITATION
Sur la position atteinte au sol 3783 et avant d'effectuer un nouveau parcours, l'analyse chimique et l'imagerie avec APXS et MAHLI se sont d’abord concentrées sur une surface rocheuse brossée, "Tarilandia" - images ci-dessous.
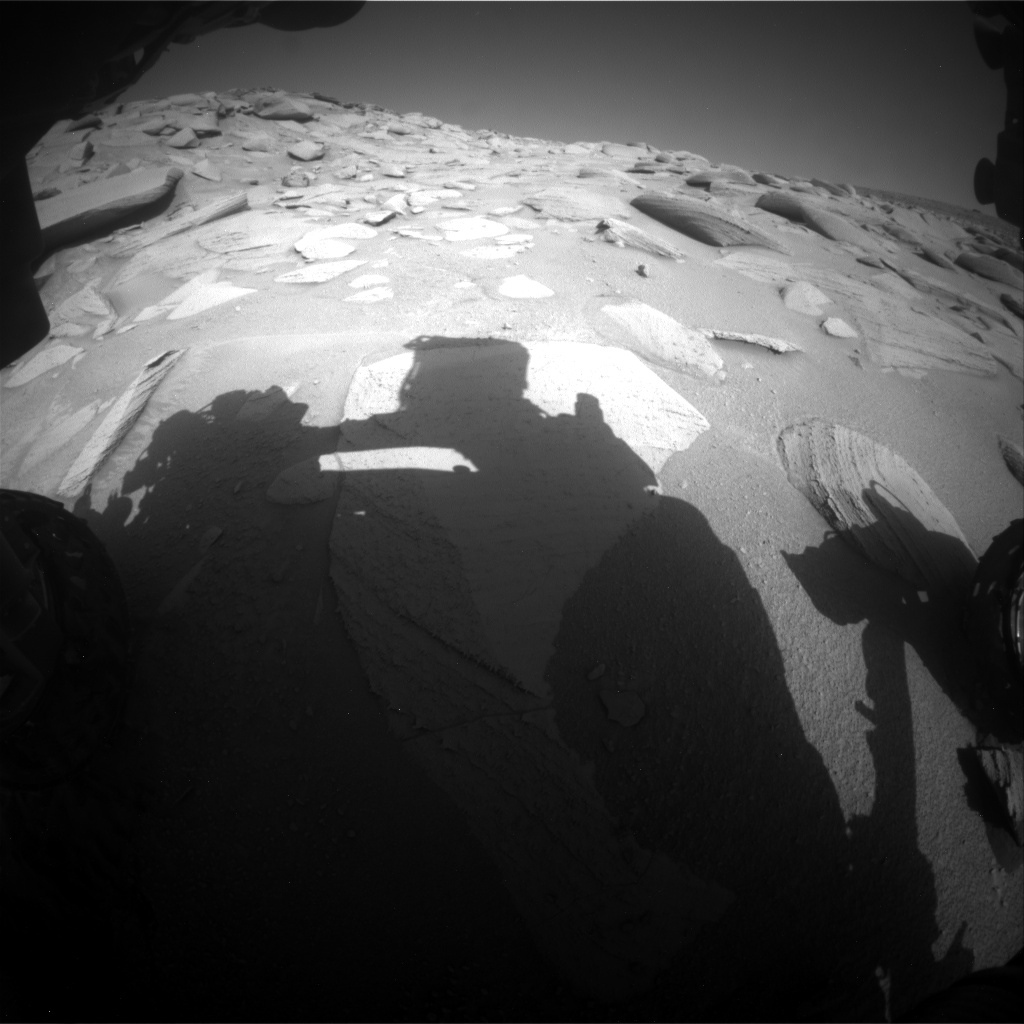
HAZCAM AVANT – 11 AVRIL 2023 (SOL 3796) :
Brossage de "Tarilandia"

MAHLI - 11 AVRIL 2023 (SOL 3796) :
Cible brossée

NAVCAM - 11 AVRIL 2023 (SOL 3796) :
L’instrument APXS sur la cible pour un analyse de chimie élémentaire
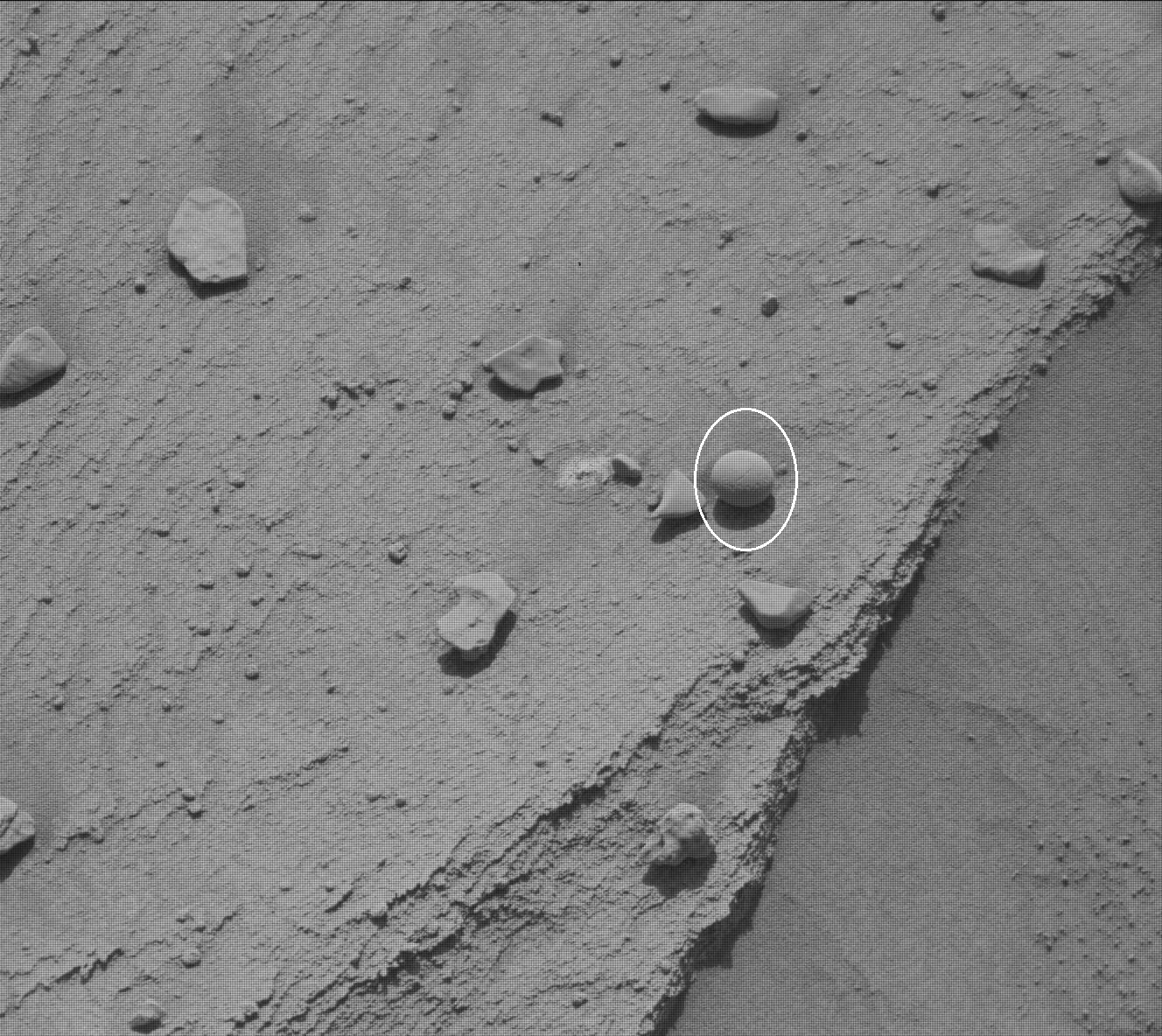
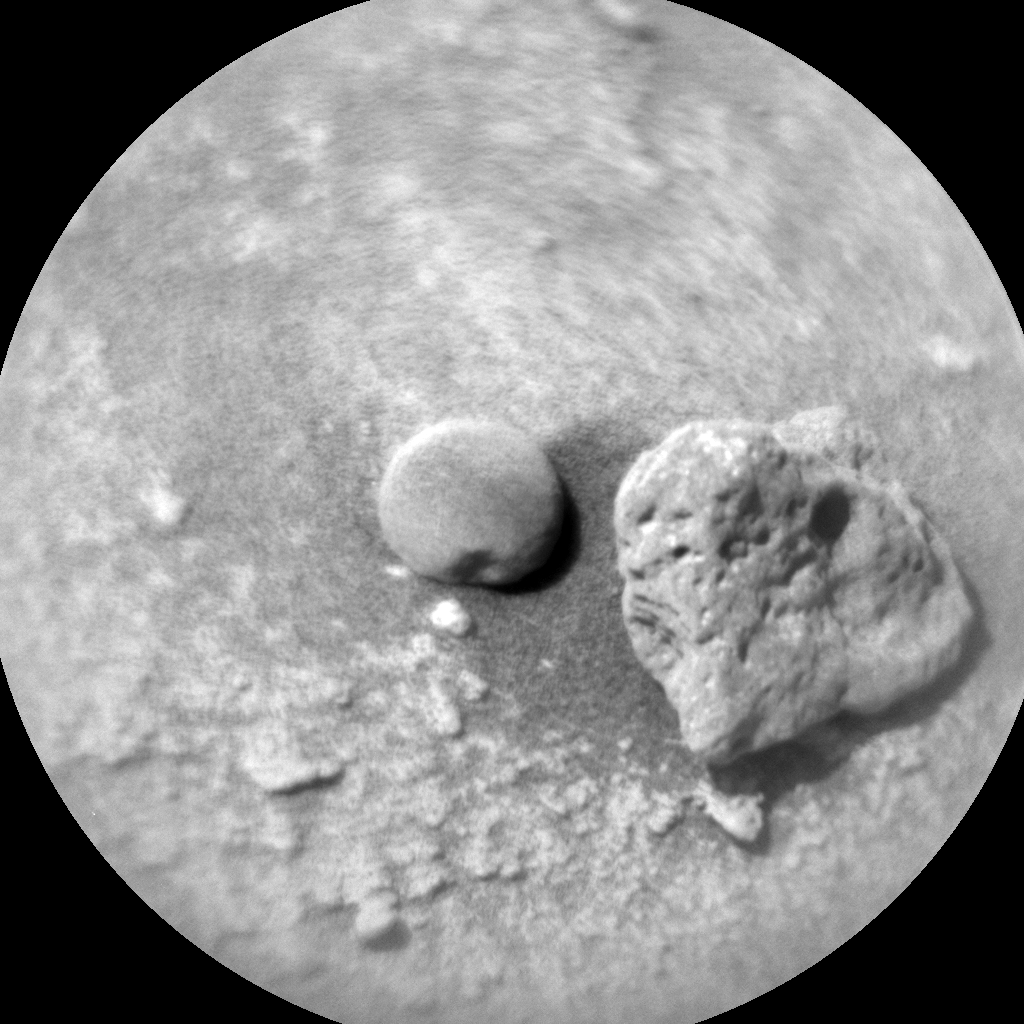
Ensuite ChemCam a pris des images et effectué des analyses laser sur la cible nommée "Bem Querer", une pierre ronde frappante que, plus haut, j’avais comparé à un oeuf…
MASTCAM – 1er AVRIL 2023 (SOL 3786) :
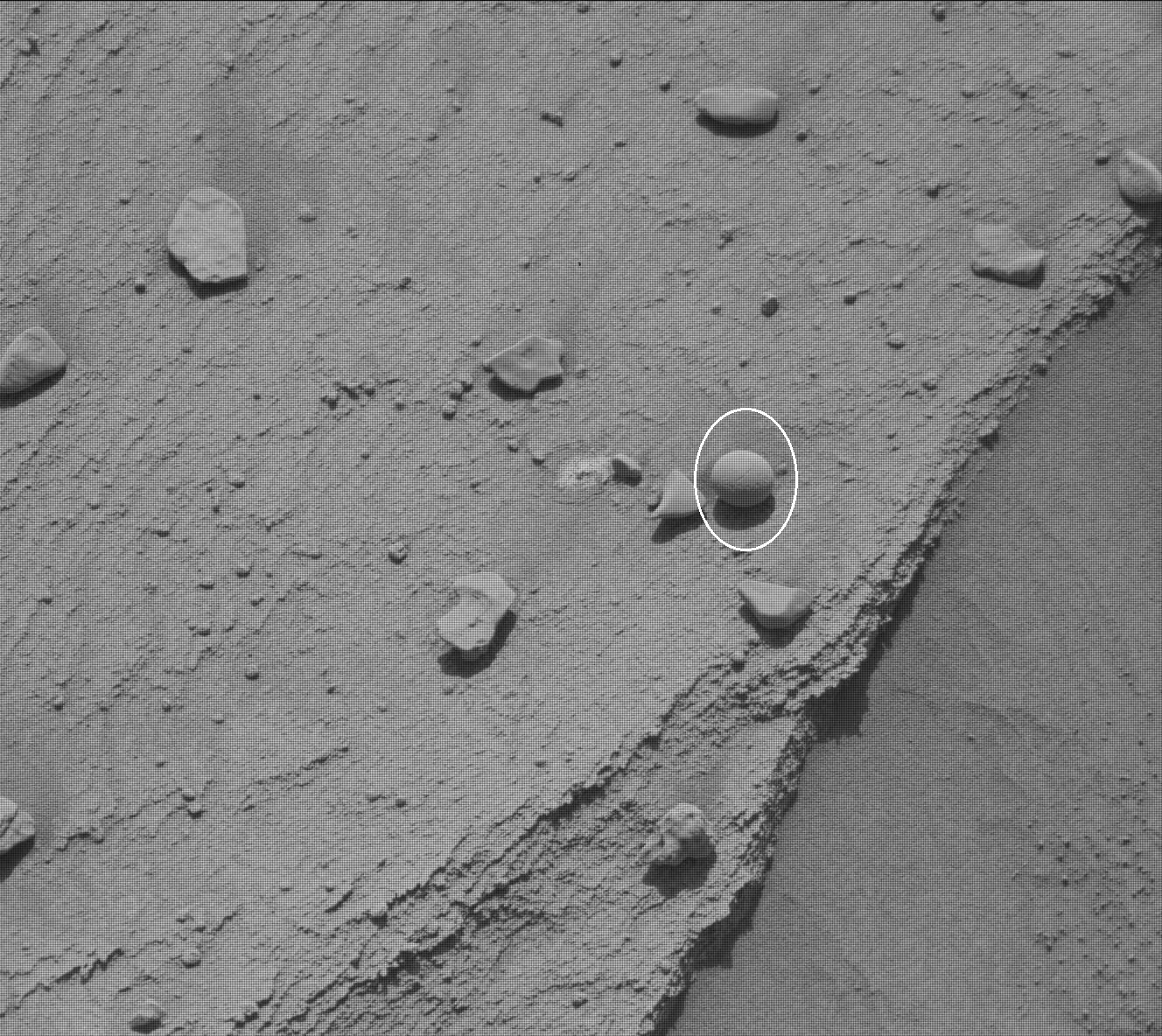
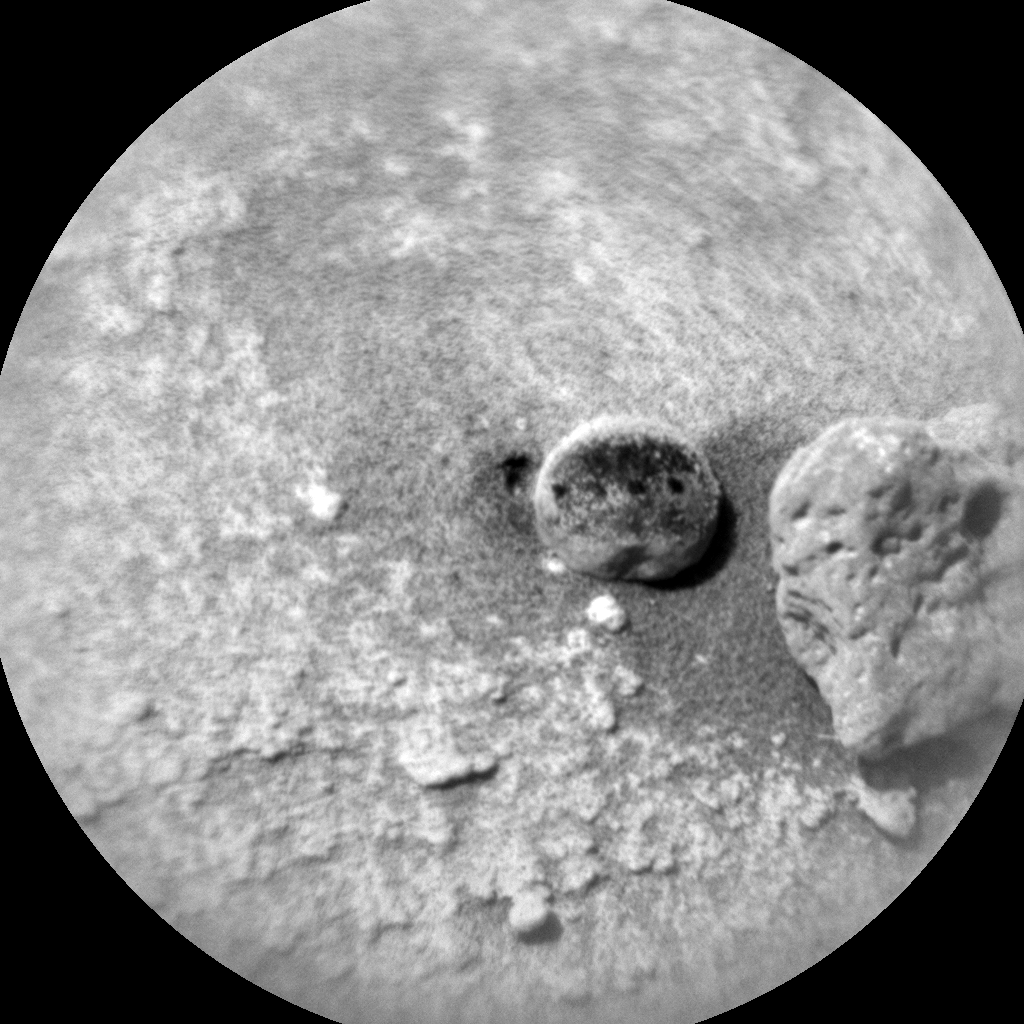
CHEMCAM/RMI - 11 AVRIL 2023 (SOL 3796) :
Un "œuf dur" du coup maintenant avec les tirs laser !


CHEMCAM/RMI – 8 AVRIL 2023 (SOL 3793) – Paul Hammond :
Dernier regard sur ces incroyables "pics" réguliers et menaçants émergeants de la roche !
Probablement composés de gypse, à savoir des concrétions d’une espèce minérale de sulfate dihydraté de calcium.
Un minéral significatif d’une longue présence d’écoulements d’eau dans les fissures de la roche, processus géologique courant très souvent observé par le rover en surface, et révélé sur ces roches tendres suite à une trèèès longue érosion éolienne. Mais ici ces longues "lances" en parallèles sont vraiment très surprenantes.
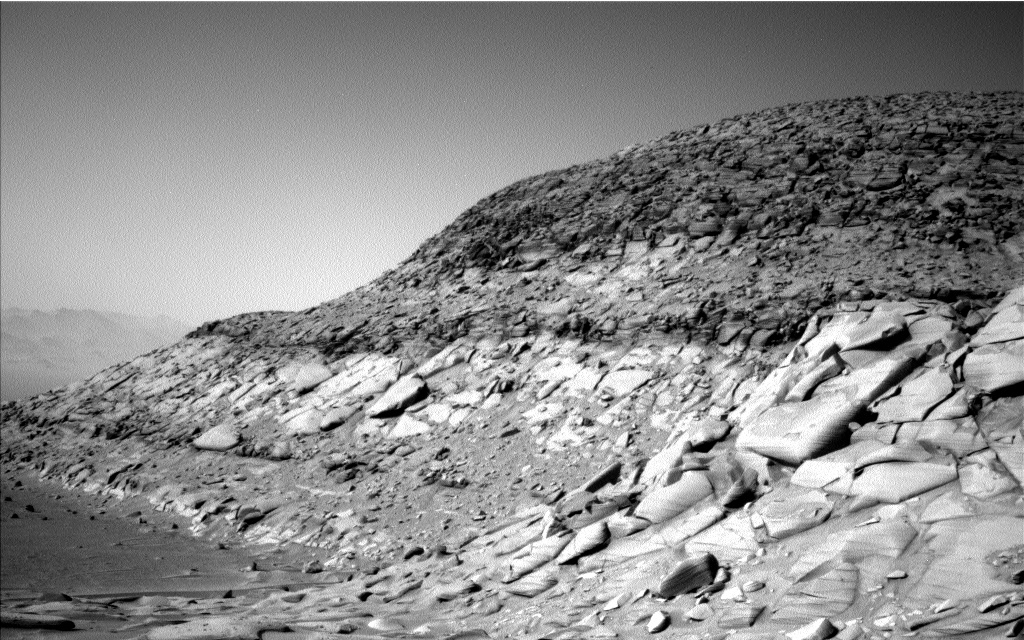
Derrière ces observations, le rover a ensuite effectué un trajet de ~30 m vers le Sud-Est en s’élevant de 3 mètres et en longeant un relief imposant de roches en éboulis nommé "Owenteik".
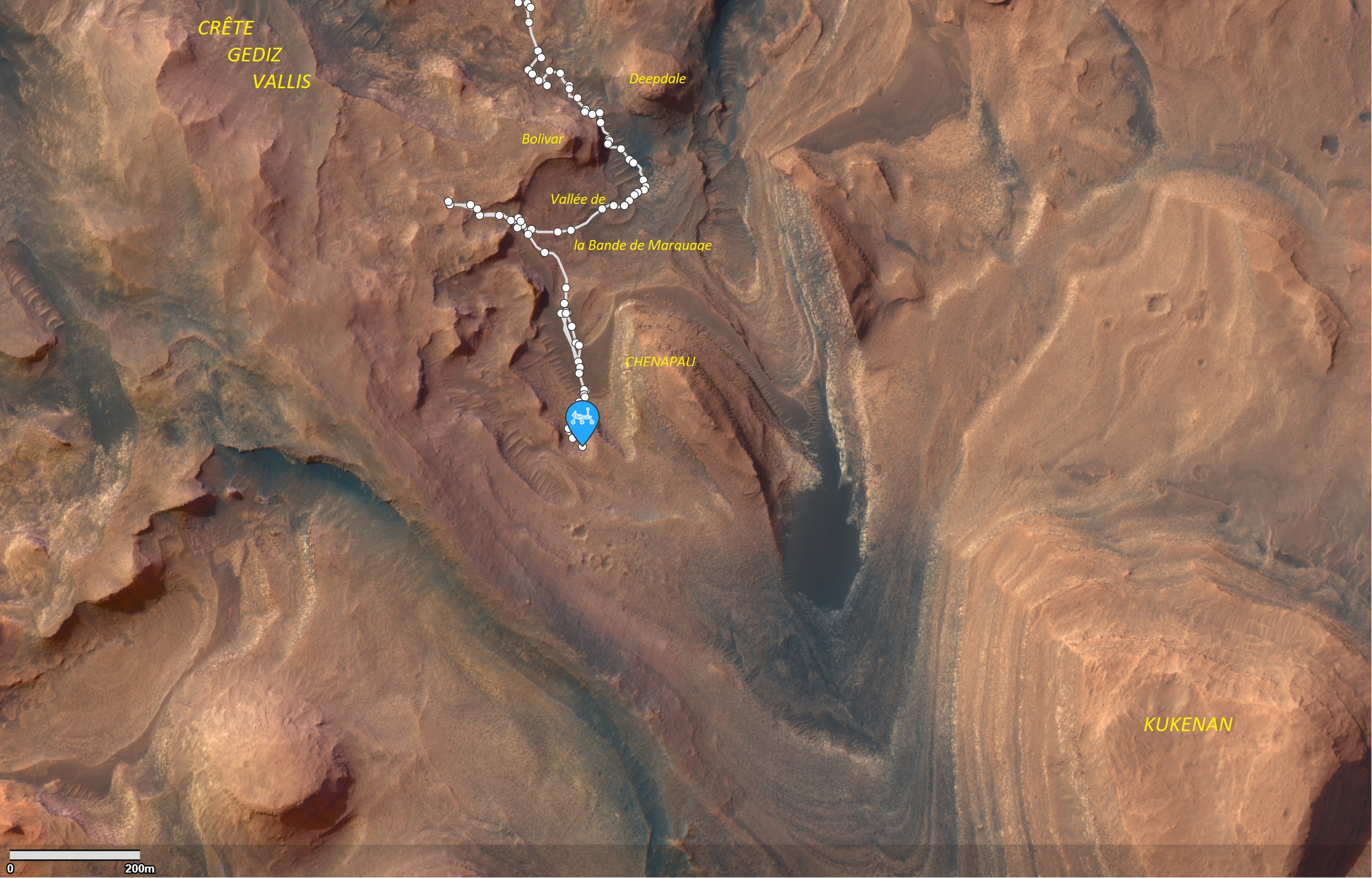
Nouvelle position au 11 avril - sol 3796 :

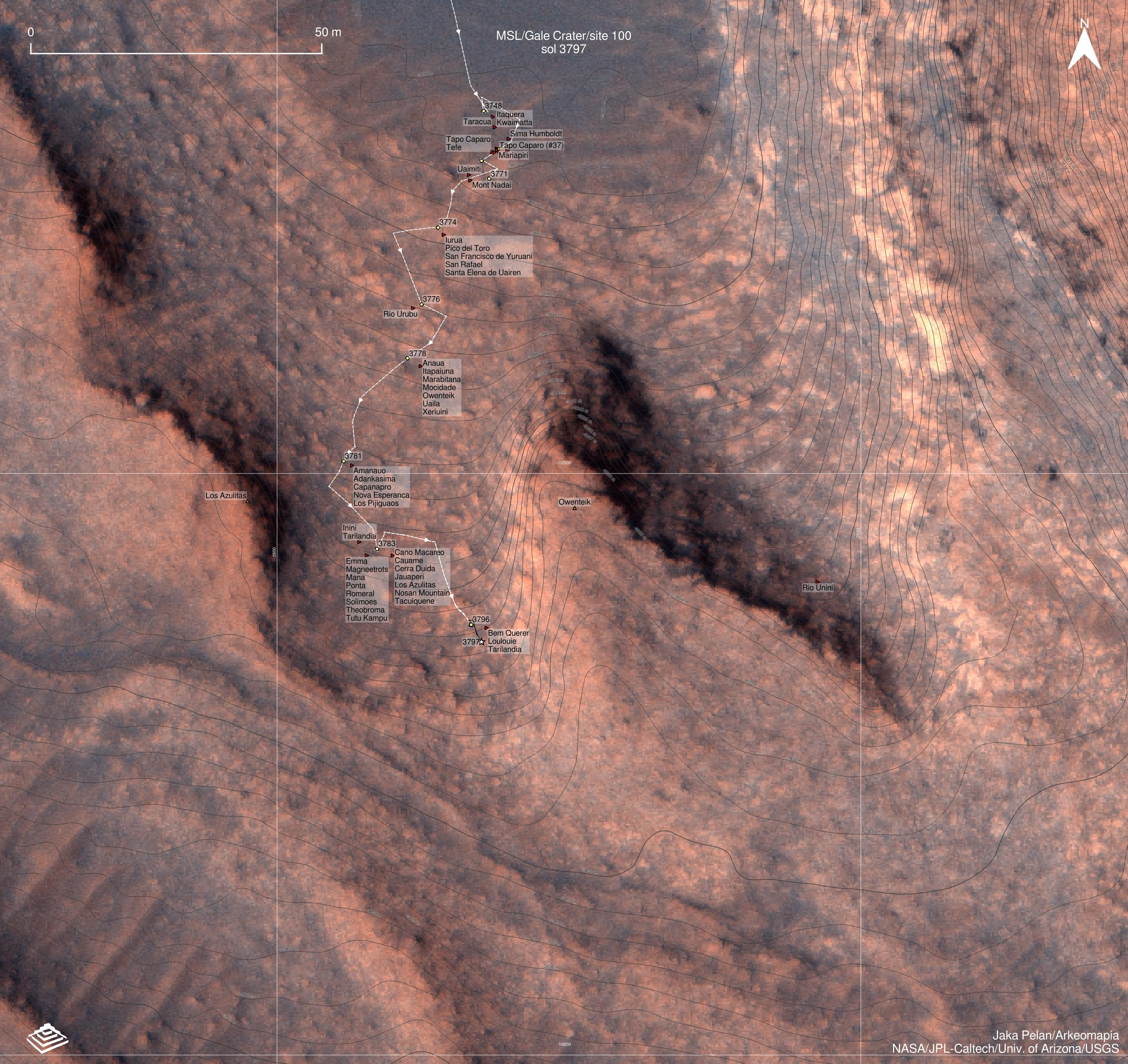
Avec les courbes de niveaux - kymani76 :
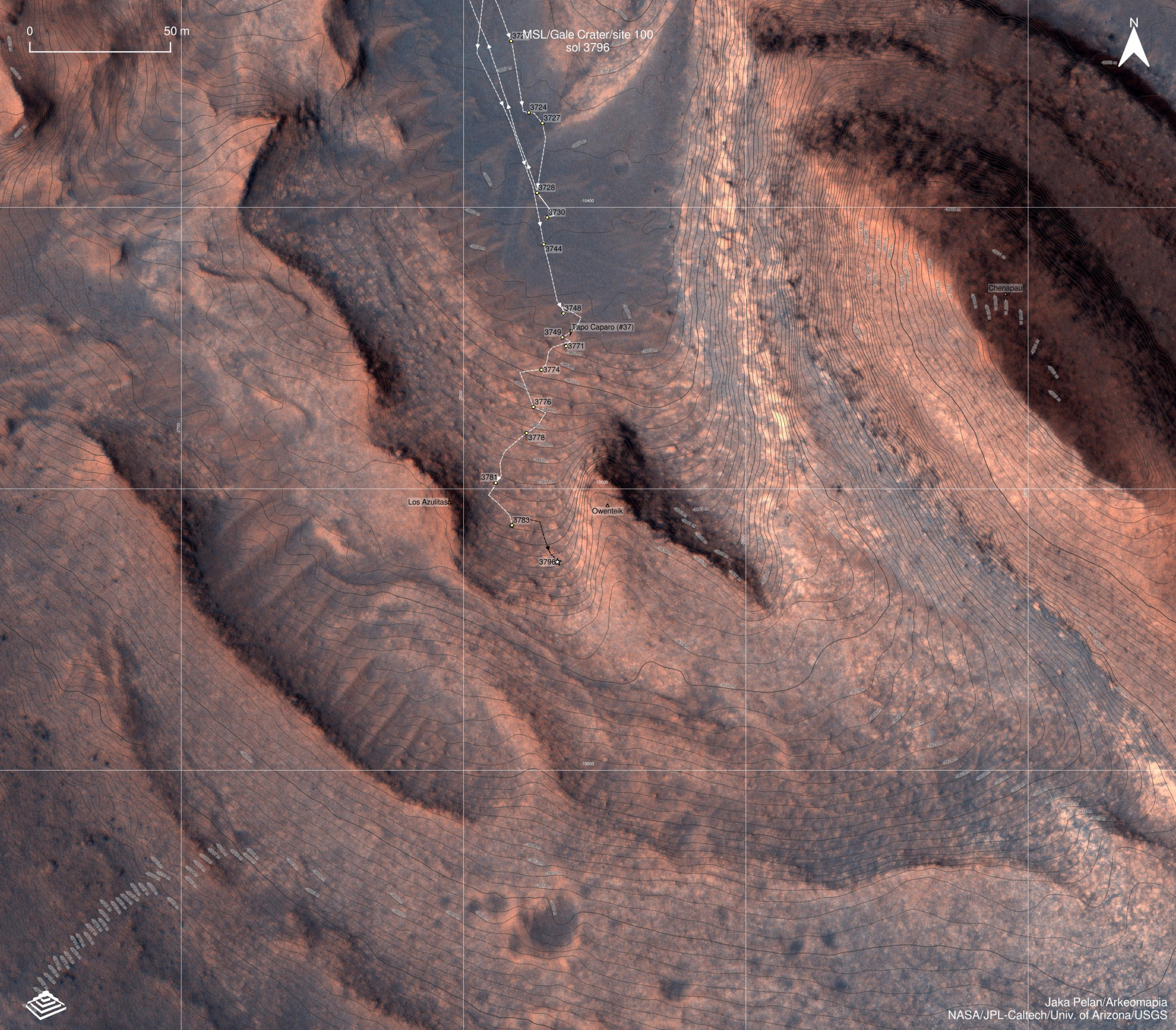
CONTEXTE :
HAZCAM AVANT – 11 AVRIL 2023 (SOL 3796) :
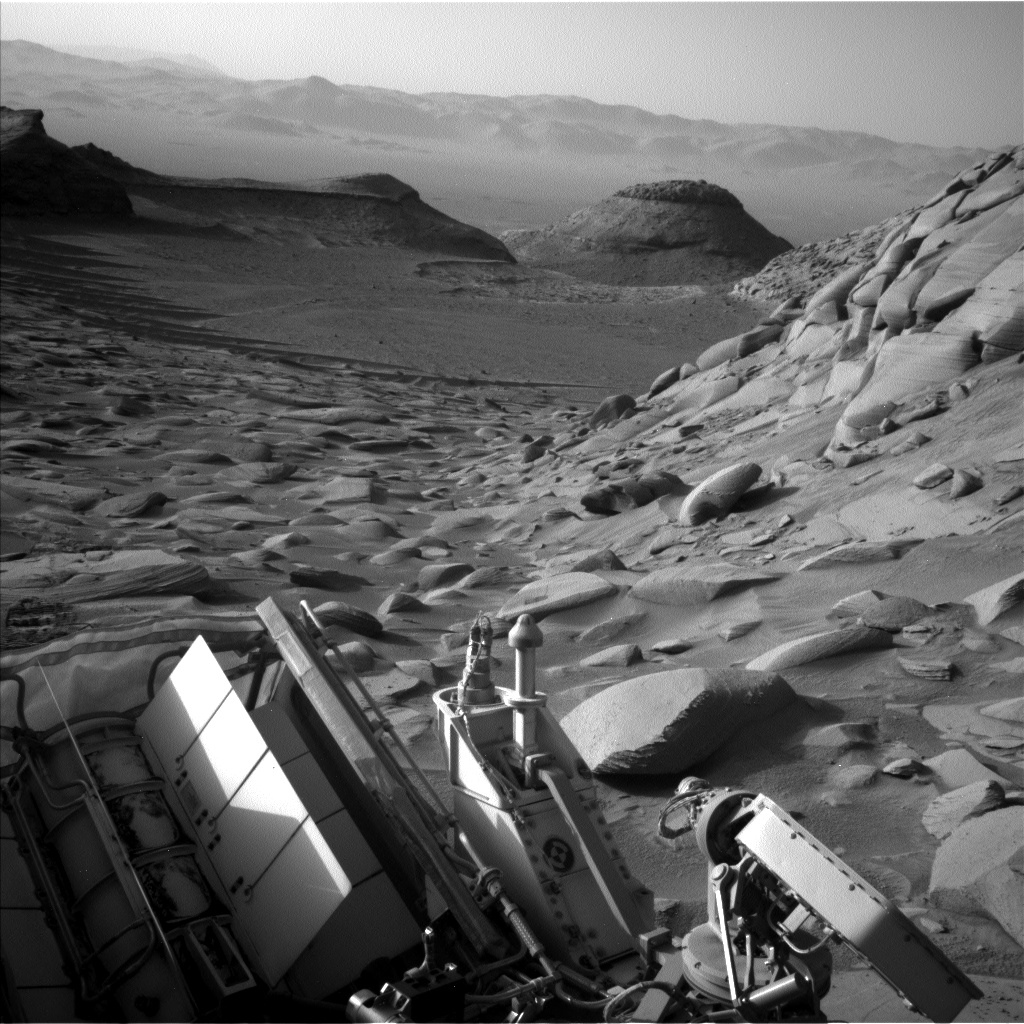
NAVCAM - 11 AVRIL 2023 (SOL 3796) :

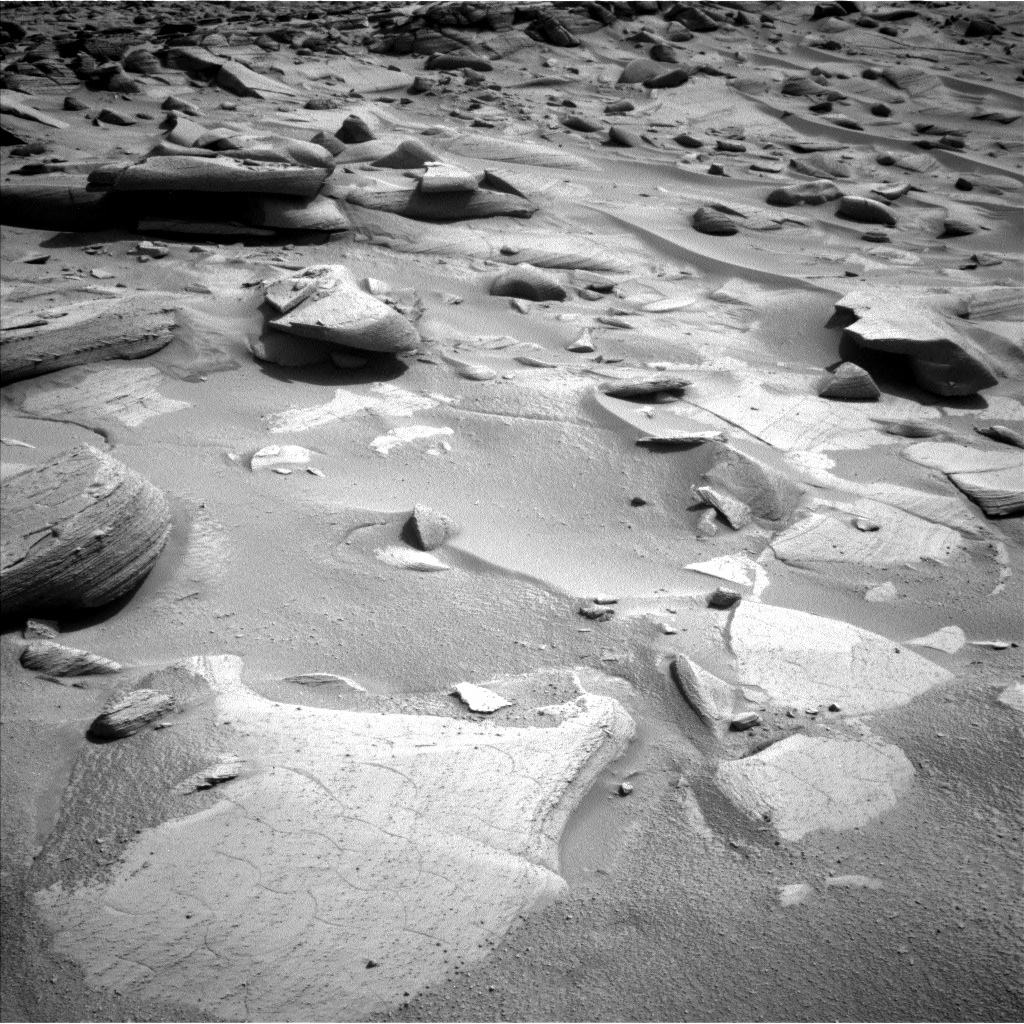


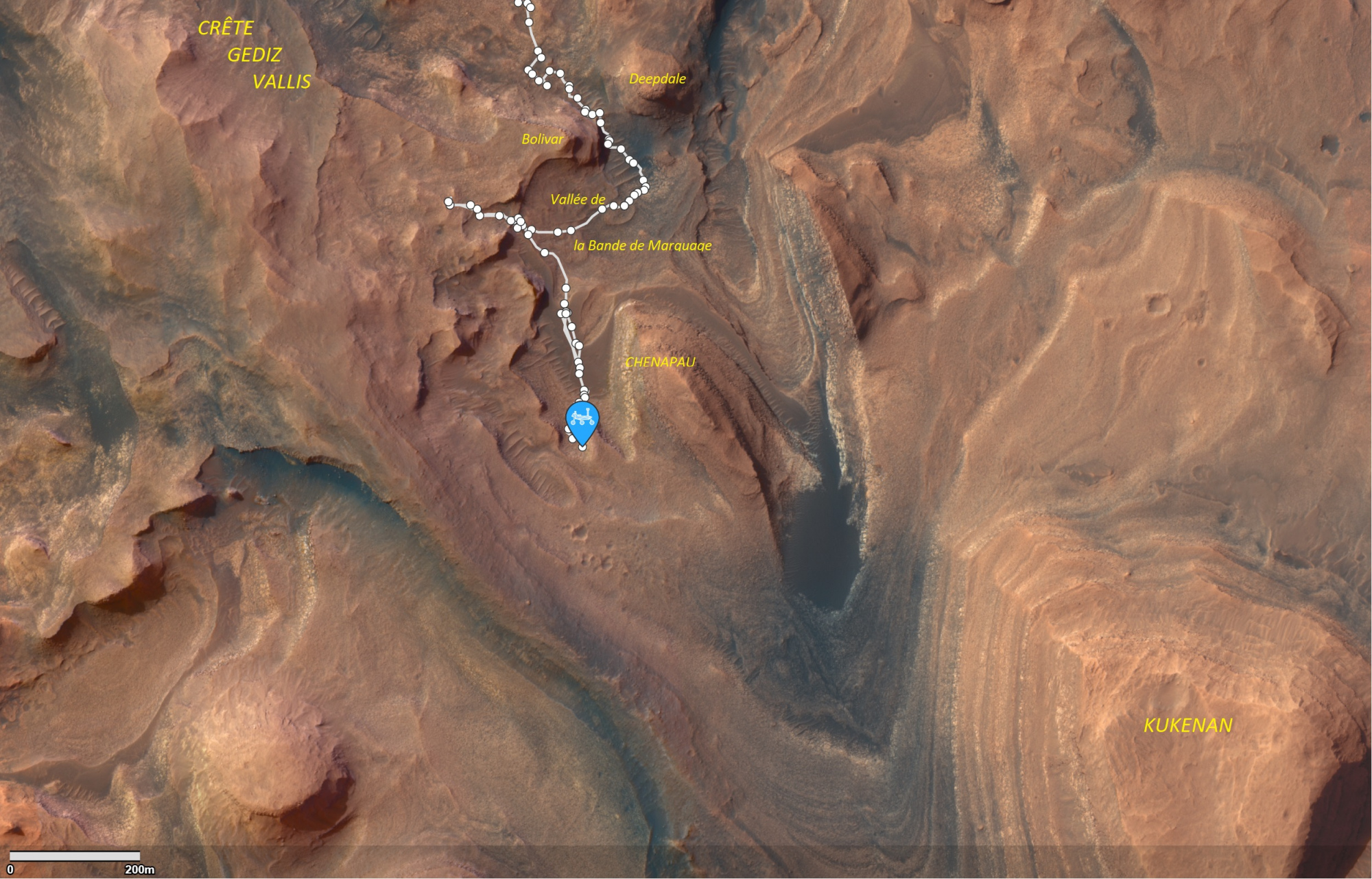
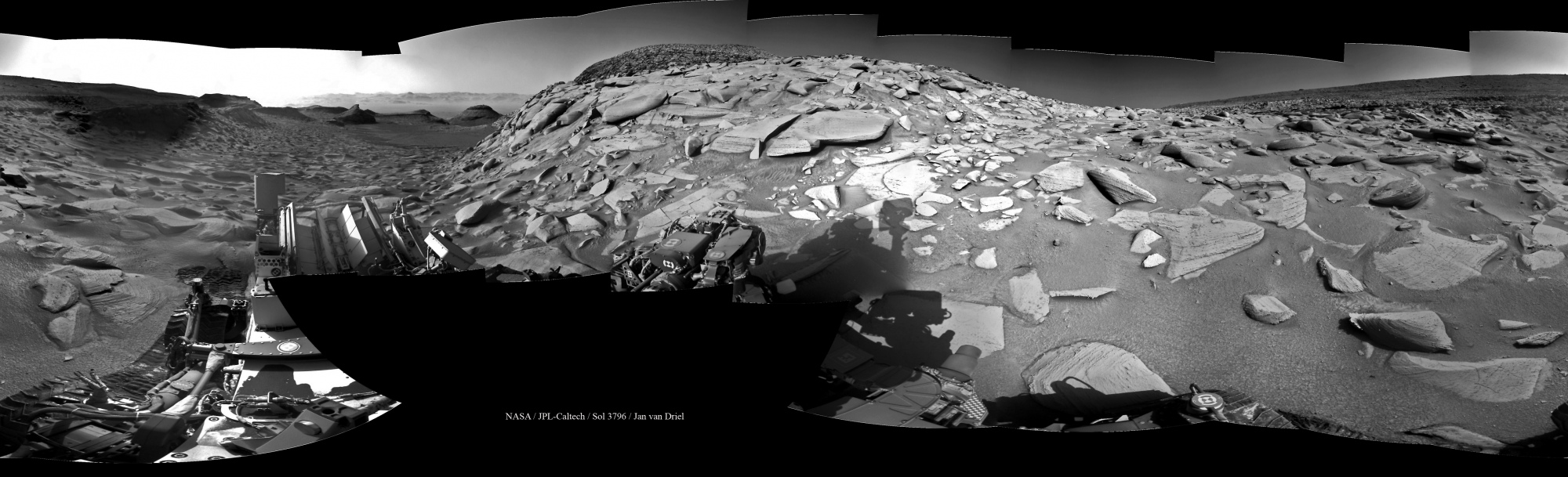
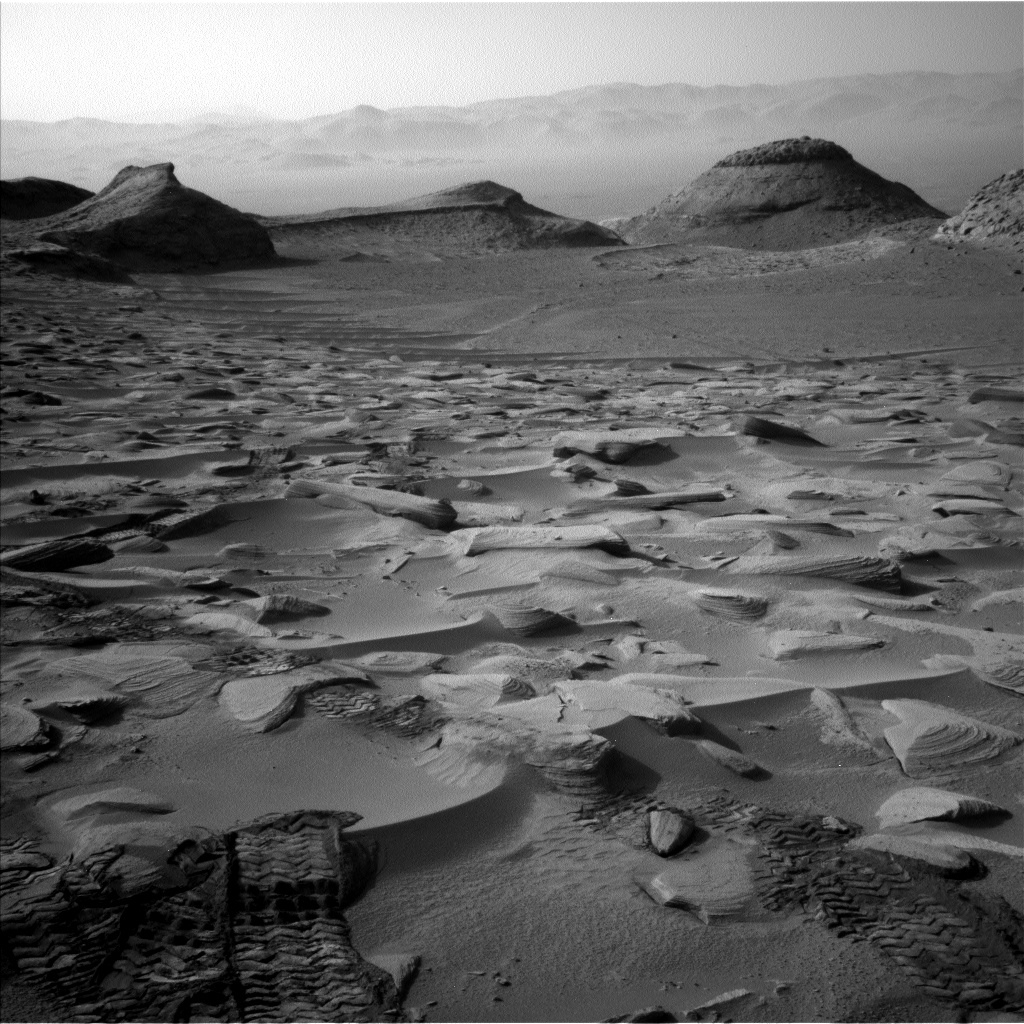
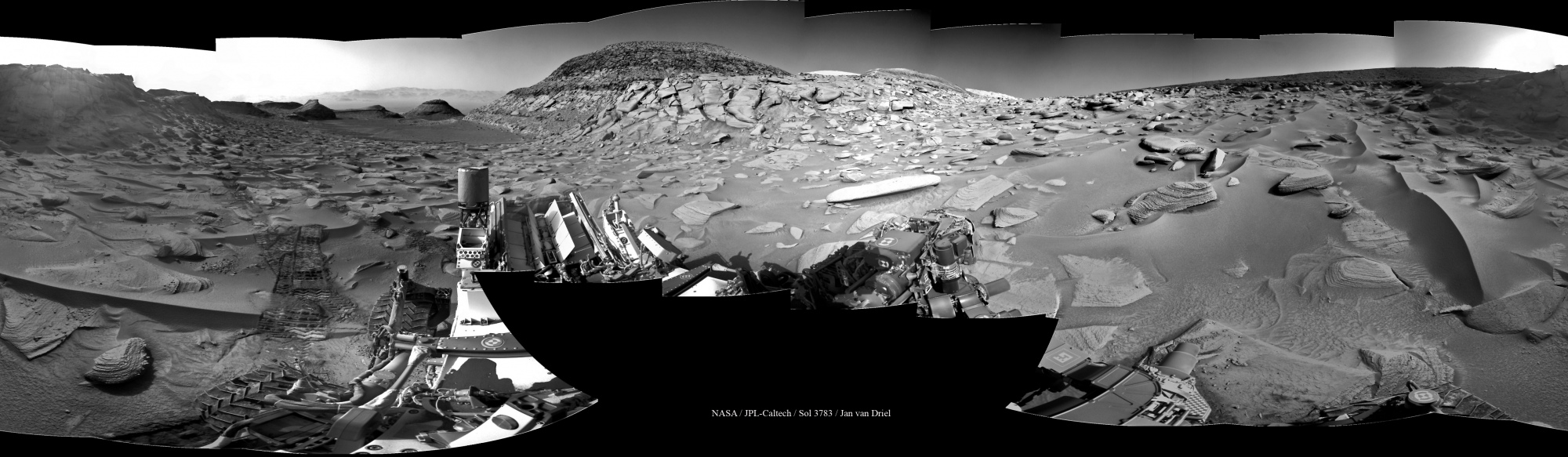
Curiosity traverse un petit canyon bordé à l'Est par ce "mur" de blocs rocheux de la petite butte nommée "Owenteik"
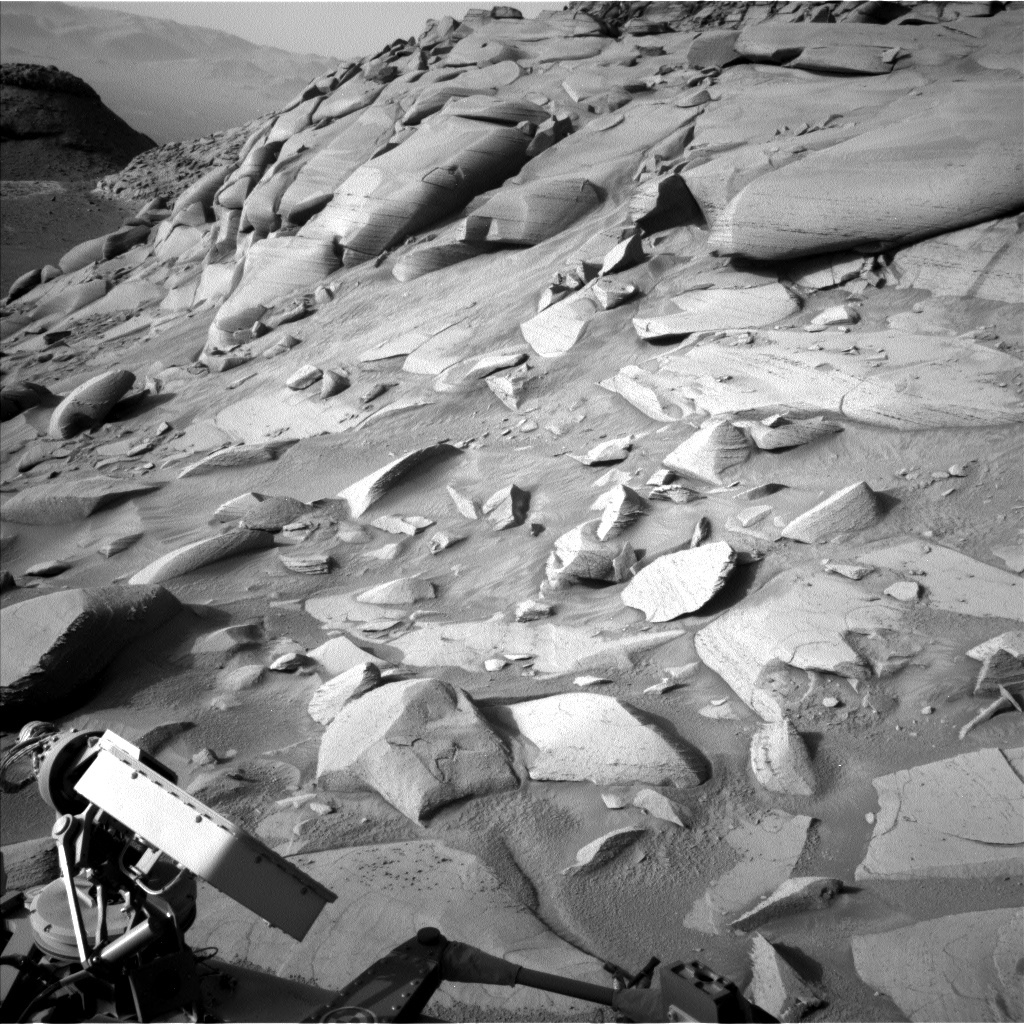
La "vallée de la Bande de Marquage", les buttes "Bolivar" et "Deepdale", et les remparts Nord du cratère Gale au loin
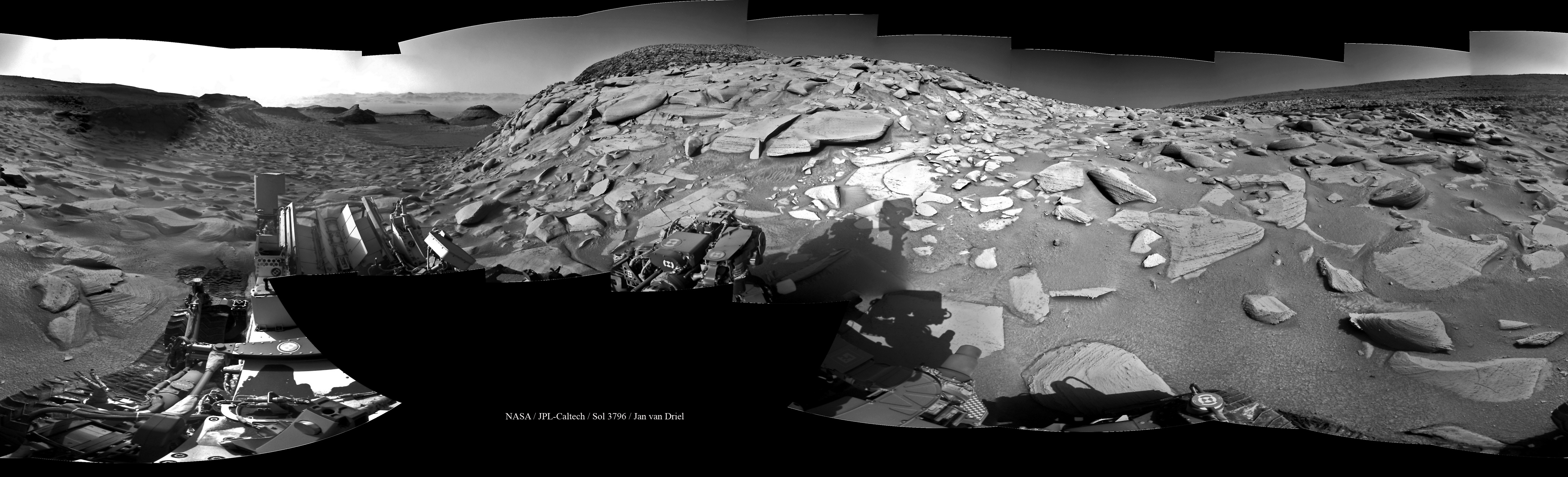
PANO NAVCAM - 11 AVRIL 2023 (SOL 3796) – Jan van Driel :
-
3
-
1
-
3
-
-
Le rover était bien placé et bien orienté pour la mise à jour logiciel prévue, opération qui devait s'étendre durant toute cette dernière semaine.
Aucun déplacement n'était donc programmé dans le plan d’activités. De même, aucun mouvement de bras n'était autorisé afin de s'assurer de tenir Curiosity prêt pour la mise à jour.
Cela signifie qu'il y a pu avoir beaucoup de temps et d'énergie pour les activités de télédétection et d'observations à distance ! En outre, la station météo REMS (Rover Environmental Monitoring Station) et le détecteur de particules RAD (Radiation Assessment Detector) devaient continuer à surveiller les conditions environnementales et DAN (Dynamic of Albedo Neutrons) mesurer la quantité d'hydrogène dans la subsurface proche.
Au début de la semaine pendant la mise à jour du logiciel, l'équipe scientifique devait tenir une réunion "virtuelle" pour discuter des résultats récents et des interprétations. Si tout se passe bien, les opérations scientifiques normales devraient reprendre ce week-end des 8 et 9 avril.
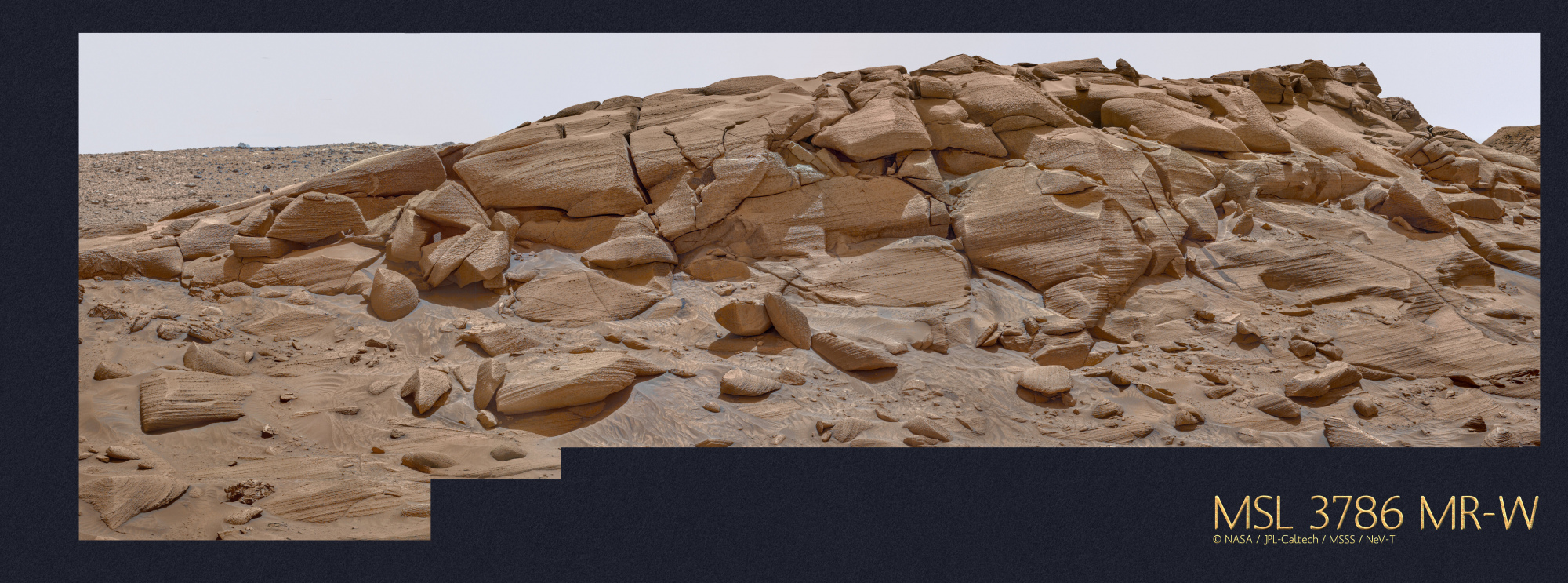
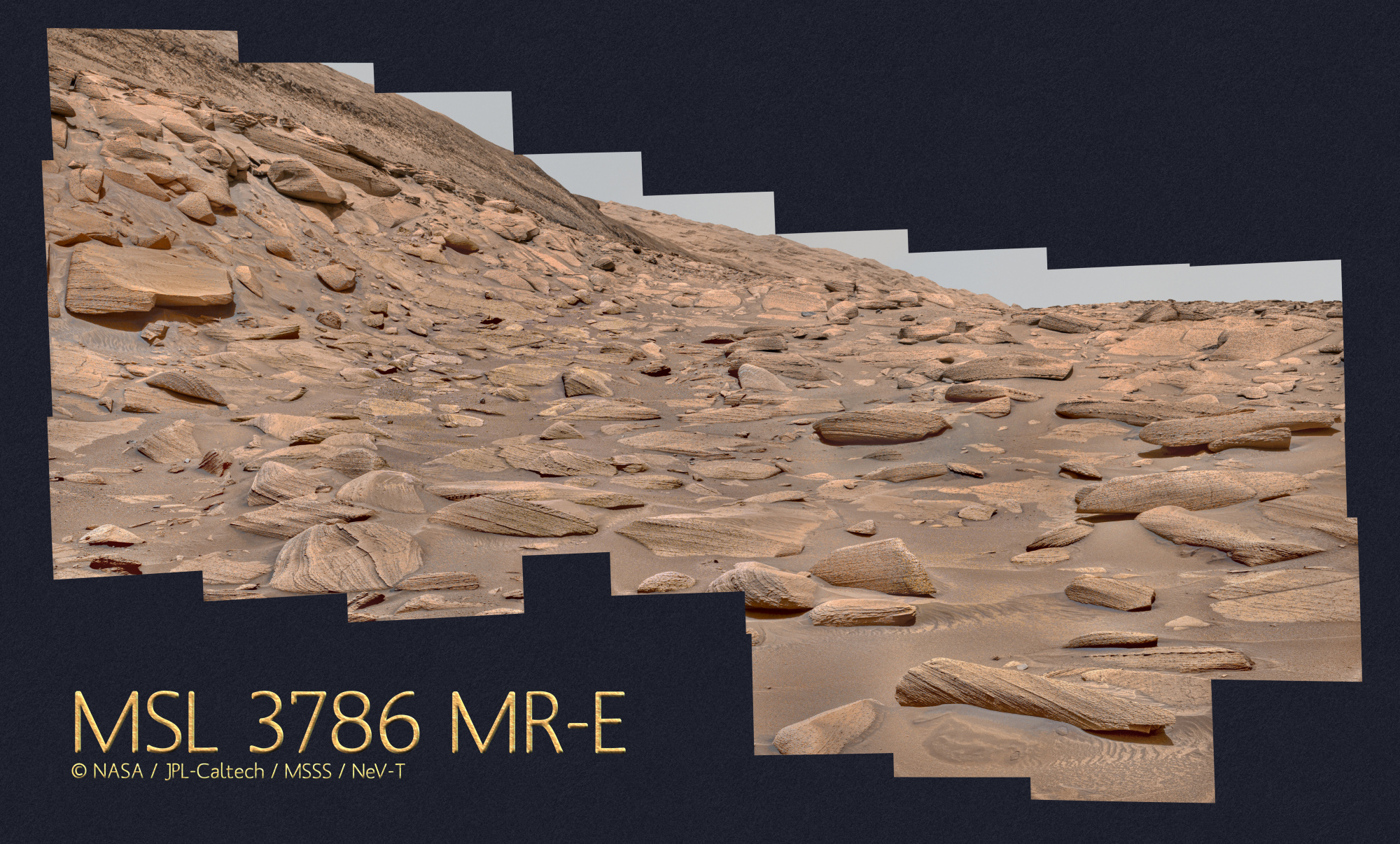
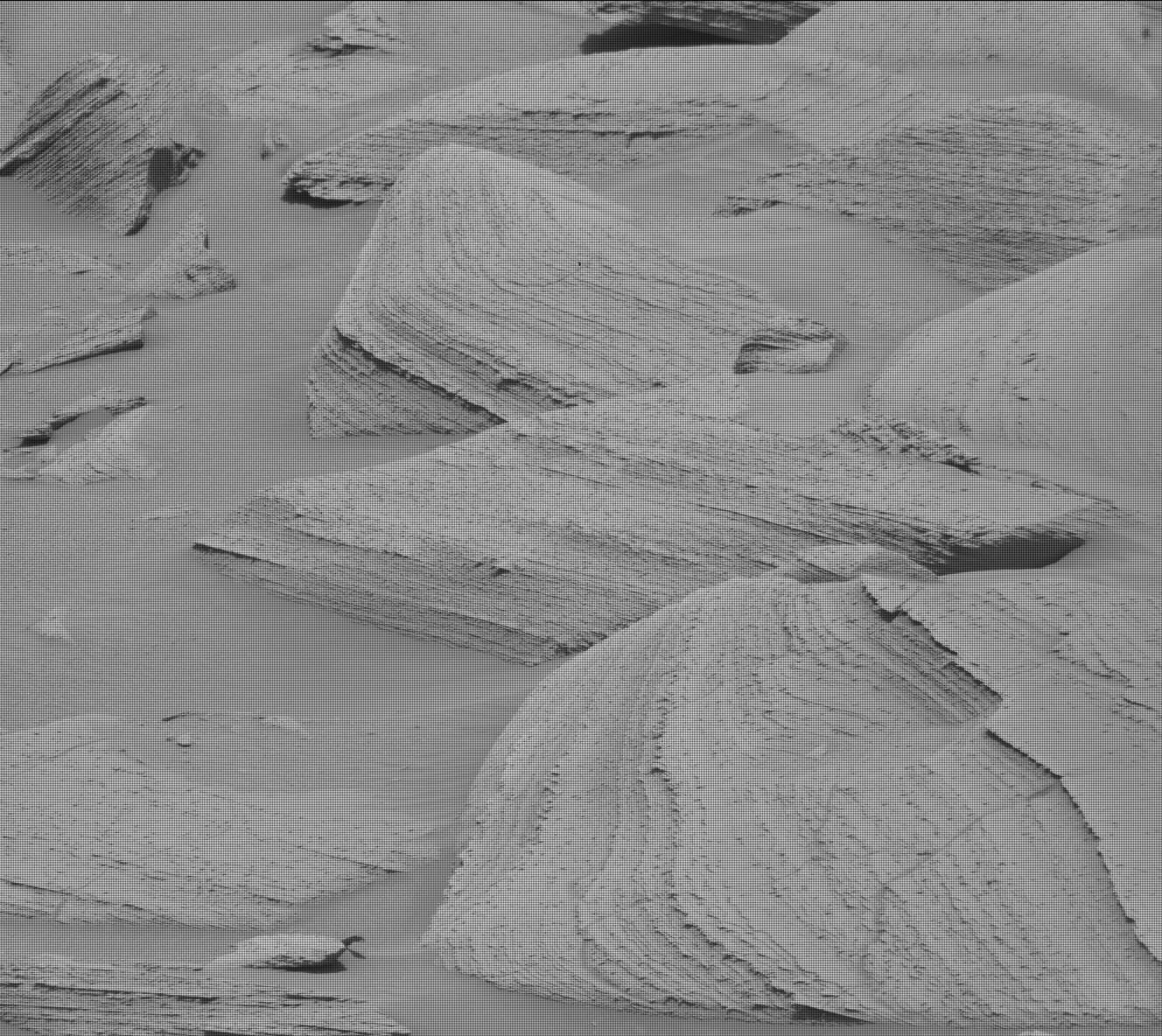
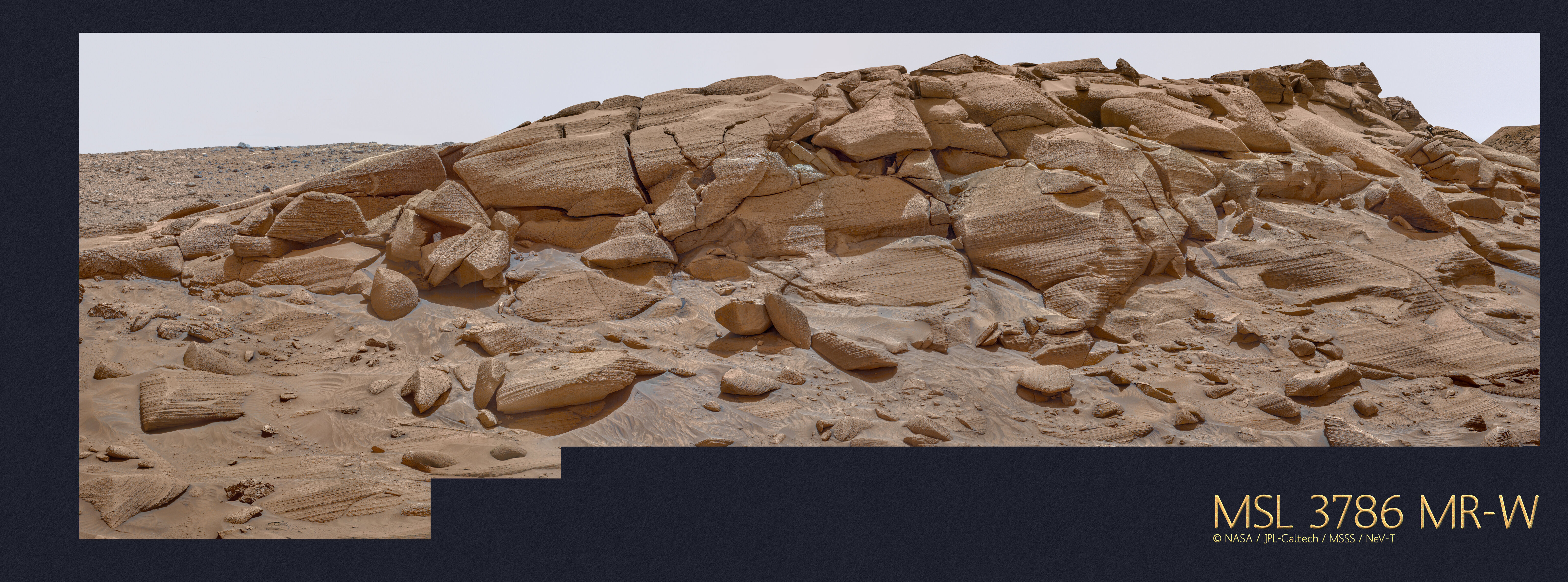
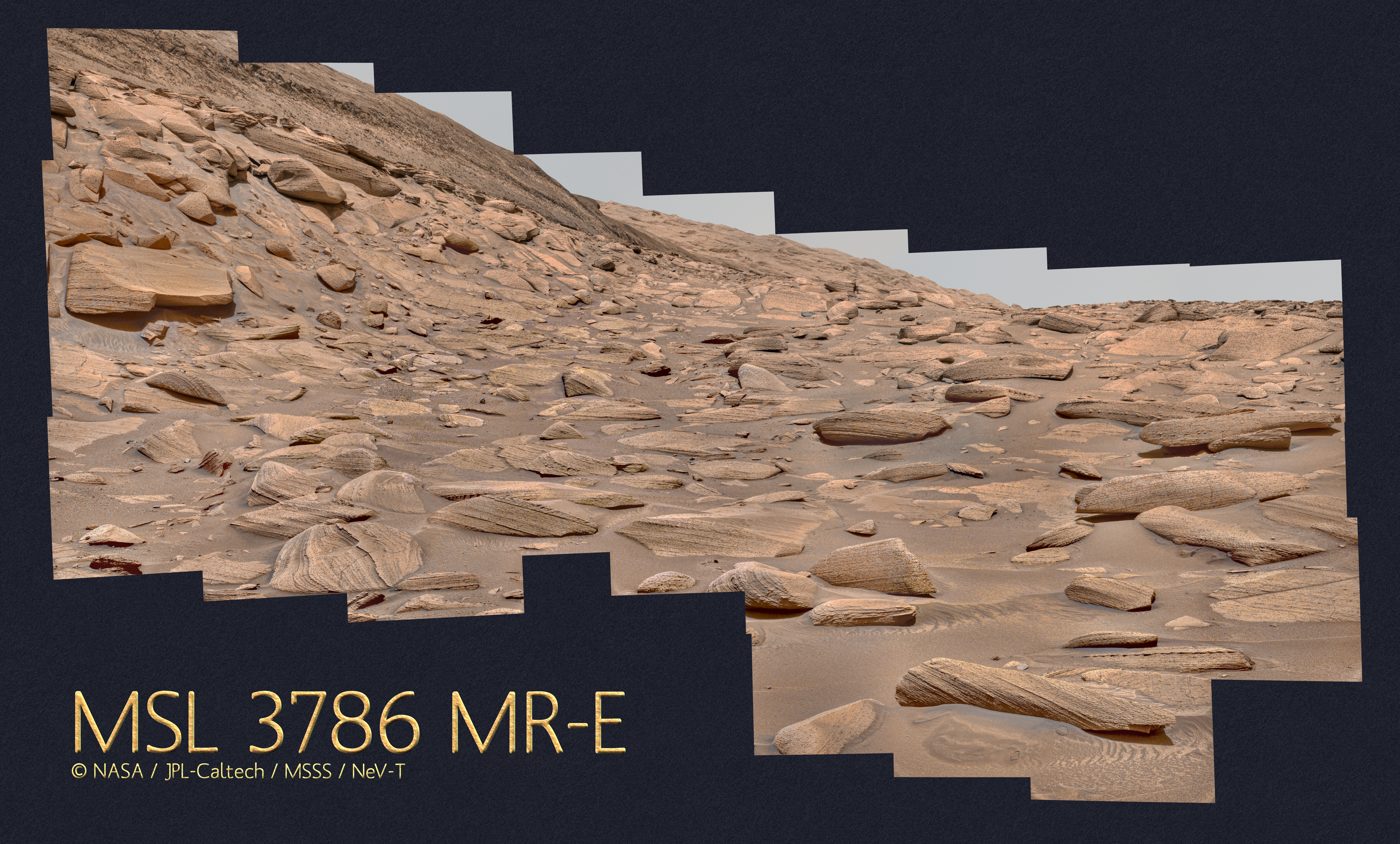
MOSAÎQUES MASTCAM - 01 AVRIL 2023 (SOL 3786) - Neville Thompson :
Monticule de blocs de roches très finement stratifiées près du rover au niveau du "col" :
Gigapan : http://www.gigapan.com/gigapans/232134
Contreforts de la butte "Chenapau" avec pas mal de gros blocs en éboulis
Gigapan : http://www.gigapan.com/gigapans/232135
À droite de l'image ci-dessus, en zoomant on peut voir ces incroyables "dents de tyrannosaure"
qui s'étendent jusqu'à projeter leurs ombres sur la roche hôte - dingue ! :

-
4
-
1
-
2
-
-
Vu la conso très énergivore des 33 raptors du Booster puis des 6 de la Starpschiiit, il faut transporter une quantité astronomique de carburant pour alimenter les citernes et l'engin.. du coup toutes les ressources utilisables sont les bienvenues !!

-
1
-
6
-
-
Aux dernières nouvelles, le...

.... serait reporté au 17 avril.. (si autorisation de la F2A)
PS > Enfin peut-être hein, le "calendrier muskien" est souvent celui d'un autre monde, imaginaire
 ...
...-
5
-
-
Il y a 7 heures, Superfulgur a dit :du coup, vous qui suivez ces trucs, n'y a t'il pas un énorme non dit dans le programme Artemis, à savoir, en gros, qu'ils vont "facilement" retourner sur la Lune, mais que le nouveau "LEM" est un total point d'interrogation, à la fois technique et au niveau du calendrier ?
Quelqu'un pense sérieusement que le LEM de musc sera prêt en 2026 ou 2027 ?
"Sérieusement".. perso j'imagine.. plutôt NON !
La Starship HLS ne fera jamais de rentrée atmosphérique (elle restera en orbite lunaire ou sur la Lune), elle n’aura donc pas de bouclier thermique ni de surfaces de contrôle de vol (ailerons).
L'engin aura six moteurs Raptor montés en queue utilisés lorsque la HLS agit comme deuxième étage lors du lancement depuis la Terre. Ils seront également utilisés comme système de propulsion principal dans toutes les autres phases de vol.
Mais cette version exigera d'autres très sérieuses modifications :
Entre autres il est fort probable que le corps de la fusée ne reprenne pas l'option acier "inox" mais un matériau plus léger.
Des moteurs RCS (Reaction Control System) - Methane/Oxygène - de poussées moindres placés sur le corps du lanceur seront utilisés à proximité du sol lunaire pour limiter les jets de poussière. À moins de 100 mètres de la surface lunaire, cette version utilisera des propulseurs RCS situés au milieu du corps pour éviter les problèmes d’impact du panache avec le régolithe lunaire. Ces propulseurs brûleront de l’oxygène gazeux et du méthane au lieu de l’oxygène liquide et du méthane utilisés par les Raptors.
Par ailleurs pour s'alimenter en électricité la HLS devra être équipée de panneaux solaires autour de sa circonférence !!
Le 15 novembre 2022, la NASA a annoncé l’attribution de l’option B de 1,15 milliard de dollars américains et a annoncé que cet atterrissage avec équipage devait avoir lieu dans le cadre d’Artemis 4. Le vol comprendra aussi l’amarrage au Gateway en orbite lunaire. La HLS de l’option B répondra aux exigences de la NASA pour une HLS "durable". Ce qui inclue la capacité de soutenir un équipage de quatre personnes et des séjours de surface lunaire de plus longue durée (100 jours).
La grande inconnue demeure le scénario de ravitaillement en carburant de la HLS qui, compte tenu de sa masse, exigera quasi un "plein" à chaque aller retour !!?!? Il demeure probable vu le rythme des missions (au mieux une par an) que la HLS soit abandonnée et remplacée !!!
Dans la vidéo ci-dessous le commentaire est explicite..
La première partie est consacrée au scénario adopté pour les missions Apollo , il est question de la HLS à partir de 7mn15..
STARSHIP HLS / Lourde ERREUR DE LA NASA ?
-
3
-
1
-
-
il y a 43 minutes, Mercure a dit :Ironie facile d'un jaloux aigri, probablement boomer, venant d'un petit pays ridicule même pas capable de récupérer le premier étage des ses fusées qu'il construit même pas tout seul!
Mais non.. pffff.. pas du tout !... ni aigri ni jaloux !!
La preuve : on travaille déjà sur une combinaison spatiale à moindre coût pour la première européenne sur la Lune ! :

-
1
-
1
-
5
-
-
Quelques remarques..
Quatre versions de Starship à mettre au point dans les 2 / 3 années qui viennent !..
"Y'a encore du pain sur la planche" comme on dit communément.
La Starship version S24 actuelle et le booster B7 qui "devraient" décoller en avril 2023 préfigurent uniquement la version transport de fret sur Terre ou en orbite, et celle destinée au largage de la flotte STARLINK.
Ce n’est que lorsque ce programme arrivera à terme qu’ils pourront passer à la version Starship "ravitailleuse" chargée de transférer du carburant en orbites terrestre ou/et lunaire.. à la Starship version "tanker" chargée de stocker le carburant en orbites terrestre et lunaire, et donc ensuite à la quatrième version "HLS" (Human Landing System) chargée de déposer et récupérer les astronautes sur la Lune. Sachant qu'il faudra envoyer à minima et régulièrement 7 Starship de ravitaillement pour alimenter le seul tanker en orbite terrestre..
Concernant la HLS il s'agira suivant sa mise en orbite et avant son départ pour la Lune de procéder aux opérations très complexes de transferts de carburant qui constitueront une "première" dans le spatial et exigeront de multiples tests en conditions réelles.
Cette version "Starship HLS" exigera donc de sérieuses modifications et de nombreux tests…
Franchement.. Quelle idée véritablement farfelue que de vouloir poser un tel monstre sur la Lune… sans plateforme béton, directement sur le régolite !!!.. Et de déposer les astronautes (haut perchés dans la cabine) sur le sol lunaire... avec un monte-charge !! N'importe quoi...
C’est bien une sorte d’Epée de Damoclès qui plane au-dessus du projet tant les délais semblent courts pour pouvoir intégrer la HLS au programme "Artémis 3".
La HLS est un engin conçu pour assurer le transport d'astronautes entre le vaisseau Orion en orbite lunaire et la surface de la Lune, et retour. Le vaisseau a été sélectionné début 2021 par la NASA…
Et là aussi il faudra envoyer à minima et assez régulièrement sans doute encore 3 ou 4 Starship ravitailleuses pour un autre tanker en orbite lunaire afin d’alimenter la HLS à chaque trajet aller-retour entre Orion en orbite lunaire et la surface de la Lune, ces derniers points restant à vérifier car n’ayant encore fait l’objet d’aucune précision de procédures de SpaceX !
https://www.youtube.com/watch?v=Emwbv4kE4r4
-
7
-
1
-
-
Il y a 1 heure, ALAING a dit :c'est quoi ces 4 trucs qu'il largue dans l'espace ?
Des "barres" de Starlink éjectés au travers d'une large trappe refermable..
-
2
-
1
-
-
O.F.T (Orbital Flight Test) est une animation fictive représentant un premier vol d’essai de la fusée Starship tant attendue de SpaceX. Starship est une conception de fusée très ambitieuse avec de nombreux systèmes critiques qui doivent fonctionner parfaitement ensemble pour que l’objectif ambitieux d’une réutilisation complète et rapide devienne réalité. Le véhicule réussira-t-il à surmonter la dynamique exténuante de MaxQ ou un seul problème déclenchera-t-il une cascade de défaillances menant à la déception?
La rentrée atmosphérique vaut le coup d'œil
...
-
5
-
2
-
-
il y a 7 minutes, Daniel Bourgues a dit :sur les quelques précédentes il n'y avait pas les courbes de niveau, d'où mon interrogation car avec les relief indiqués c'est bien plus parlant vu du dessus.
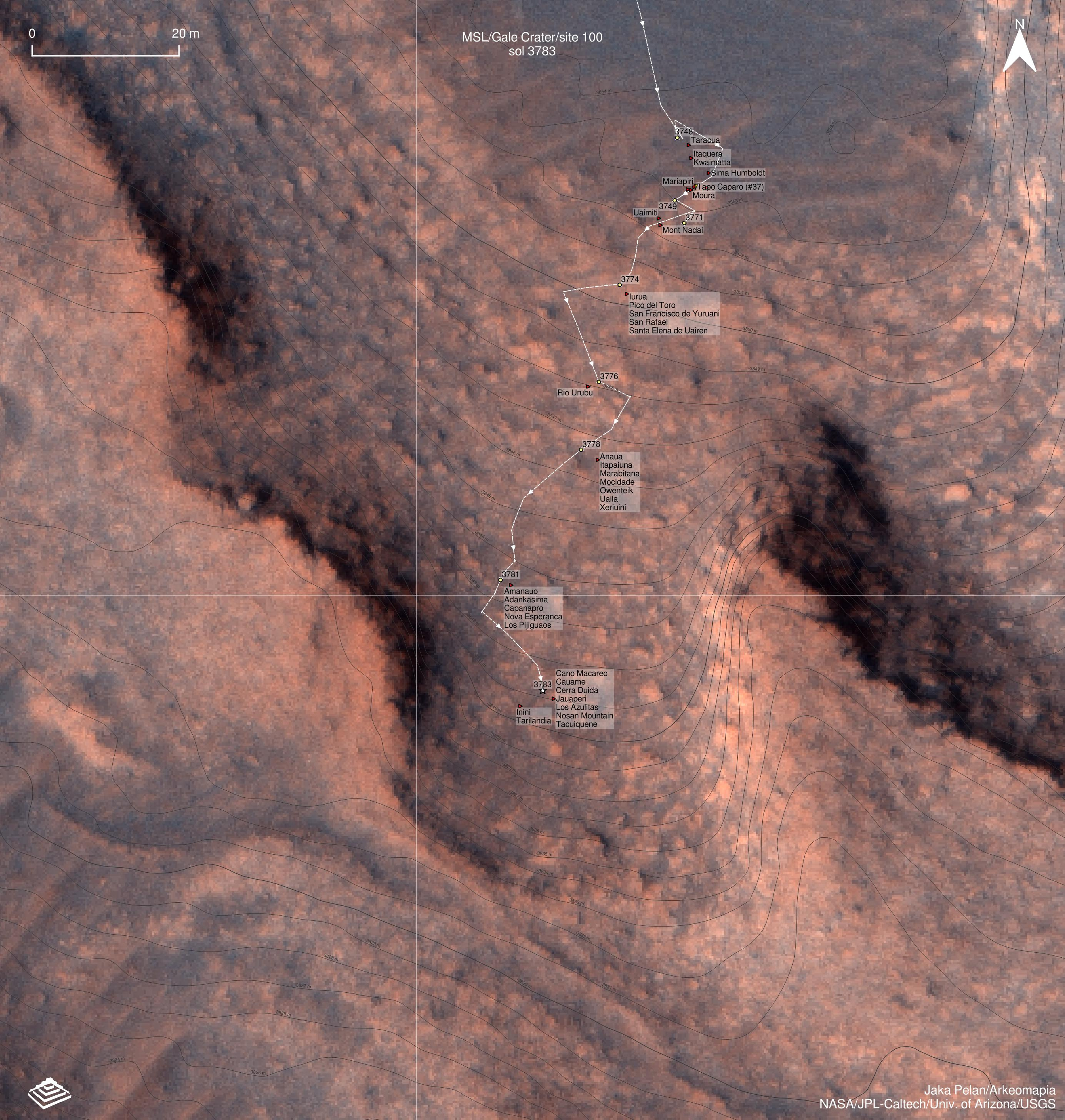
Contrairement à l'époque du début des déplacements du rover, la Nasa ne fournit plus les cartes avec niveaux. Je suis même contraint d'y ajouter les numéros de sols de chaque étape qu'ils ne se donnent plus la peine de mentionner.
C'est donc ponctuellement, sur le site "UMSF" que je récupère les cartes de niveaux travaillées par un amateur (kymani76) quand il y intervient.
PS >Je crois savoir que tu es bien plus que "malin"
-
3
-
1
-
-
il y a une heure, Daniel Bourgues a dit :quel est le dénivelé entre chaque courbe?
Bonsoir Daniel
") ,
,
Il faut double-cliquer sur l'image pour l'agrandir et zoomer pour faire apparaître les chiffres de niveaux.
Il y a 1 mètre de dénivelé entre chaque courbe et Curiosity est en montée.
Il approche de la courbe notée - 3841 m (le rover est en dessous du niveau moyen de la planète, il avait atterri à -4501 m à "Bradbury landing", il s'est donc élevé de 660 mètres depuis).
Par exemple on constate qu'il a gagné 12 mètres depuis le site du dernier forage à "Tapo Caparo" et il approche du franchissement d'un petit col. Sachant que le terrain continuera à être ascendant au delà.
-
2
-
1
-
-
Episode crucial pour Curiosity avec le téléchargement prévu entre lundi 3 et jeudi 6 avril d’une mise à jour de son logiciel. Si tout se passe bien le rover reprendra ses opérations scientifiques le vendred 7 avril.
Écrit le 29 mars par Lucy Thompson, géologue planétaire (c’est moi qui surligne):
"… nous marchons certainement, et très prudemment, sur la pointe des pieds au milieu des nombreux blocs et du sable qui bordent le col que nous sommes en train de franchir. Un autre élément à prendre en compte est que nous approchons rapidement d'une mise à jour du logiciel de vol, prévue pour la semaine prochaine. Nous devons donc nous assurer que le rover est bien placé pour communiquer avec les orbiteurs qui relaient toutes les informations en provenance et à destination de Curiosity".
/…/
"Curiosity se déplacera sur la pointe des pieds et en zigzaguant à travers les blocs et le sable..." [il s’agit du déplacement réalisé le 29 mars (sol 3783) relaté plus haut], "..ce qui nous permettra d'être en bonne position pour la mise à jour de notre logiciel et de reprendre les observations scientifiques lorsque nous reviendrons à la planification, la semaine prochaine".
/…/
"L'équipe d'ingénieurs se prépare depuis plusieurs années à développer le logiciel, à le télécharger et à le mettre en place sur Mars. Nous laisserons les ingénieurs faire leur travail du lundi au jeudi de la semaine prochaine et, si tout se passe bien, nous serons de nouveau opérationnels après cela !"
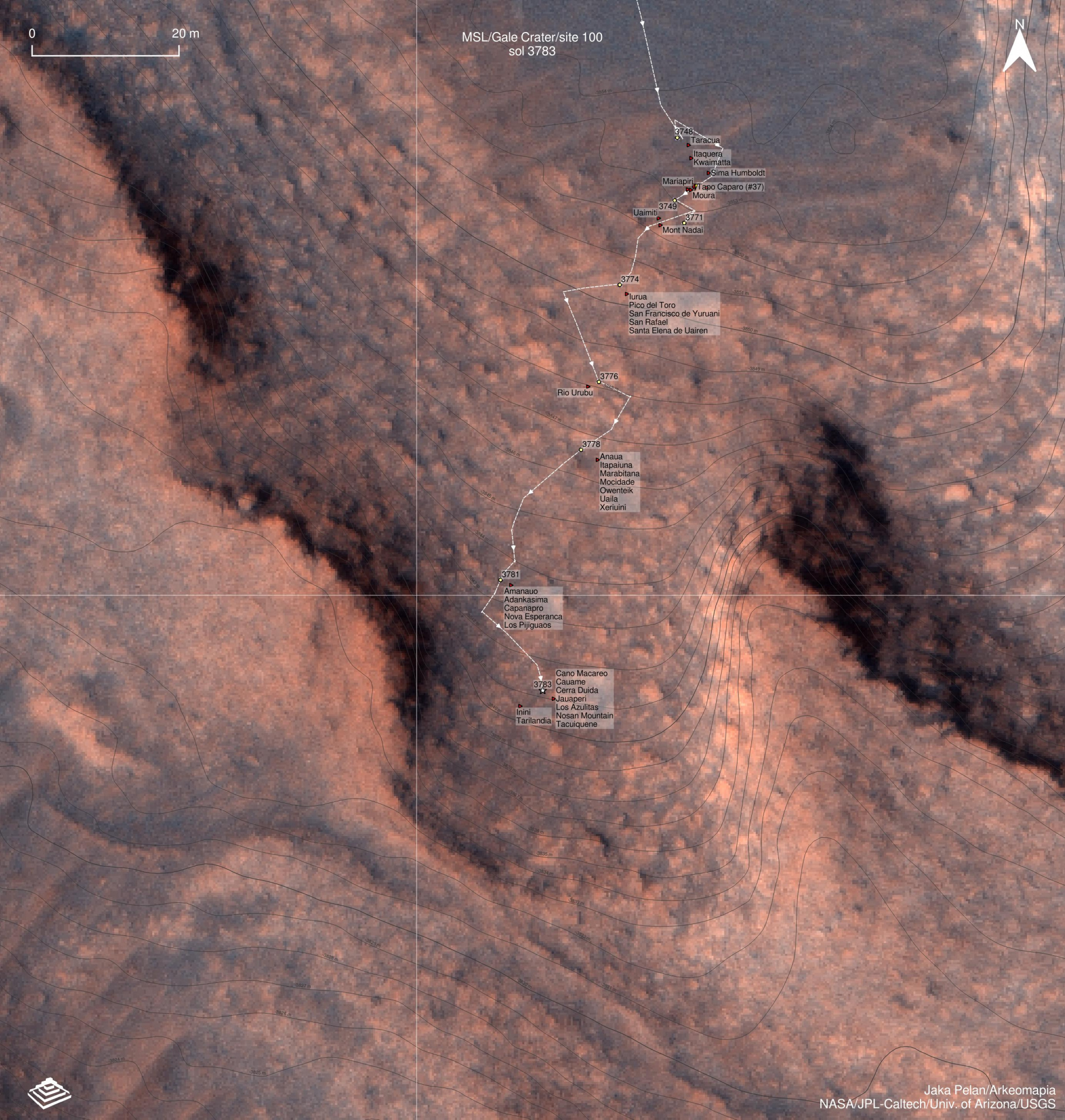
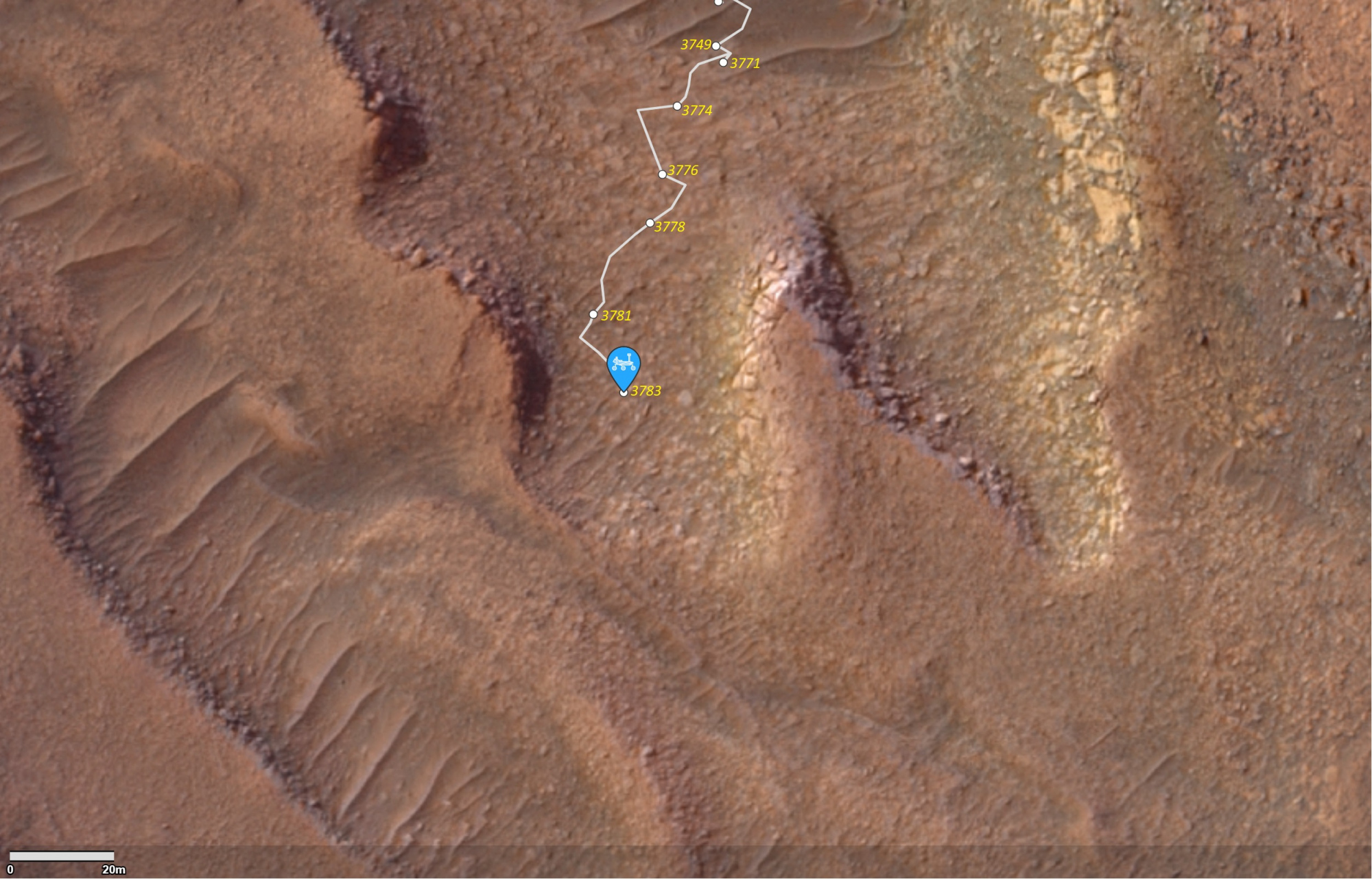
Rappel de la POSITION AU 29 MARS (SOL 3783) – kymani76 :
MASTCAM - 01 AVRIL 2023 (SOL 3786) :
Il y a eu des poules sur Mars - la preuve ! :
Un tas de gros blocs de roches très finement stratifiés et accumulés près du rover



Et les blocs stratifiés habituels émergents du sol sableux
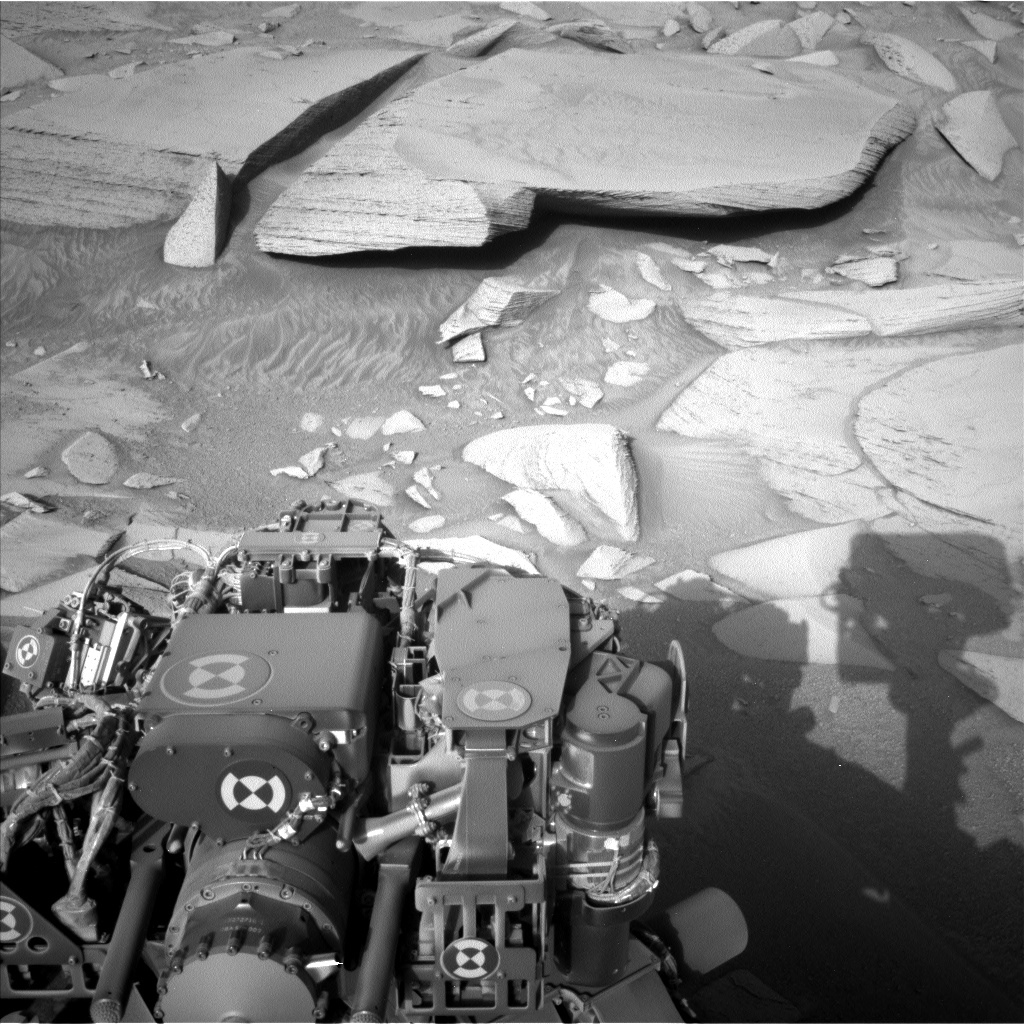
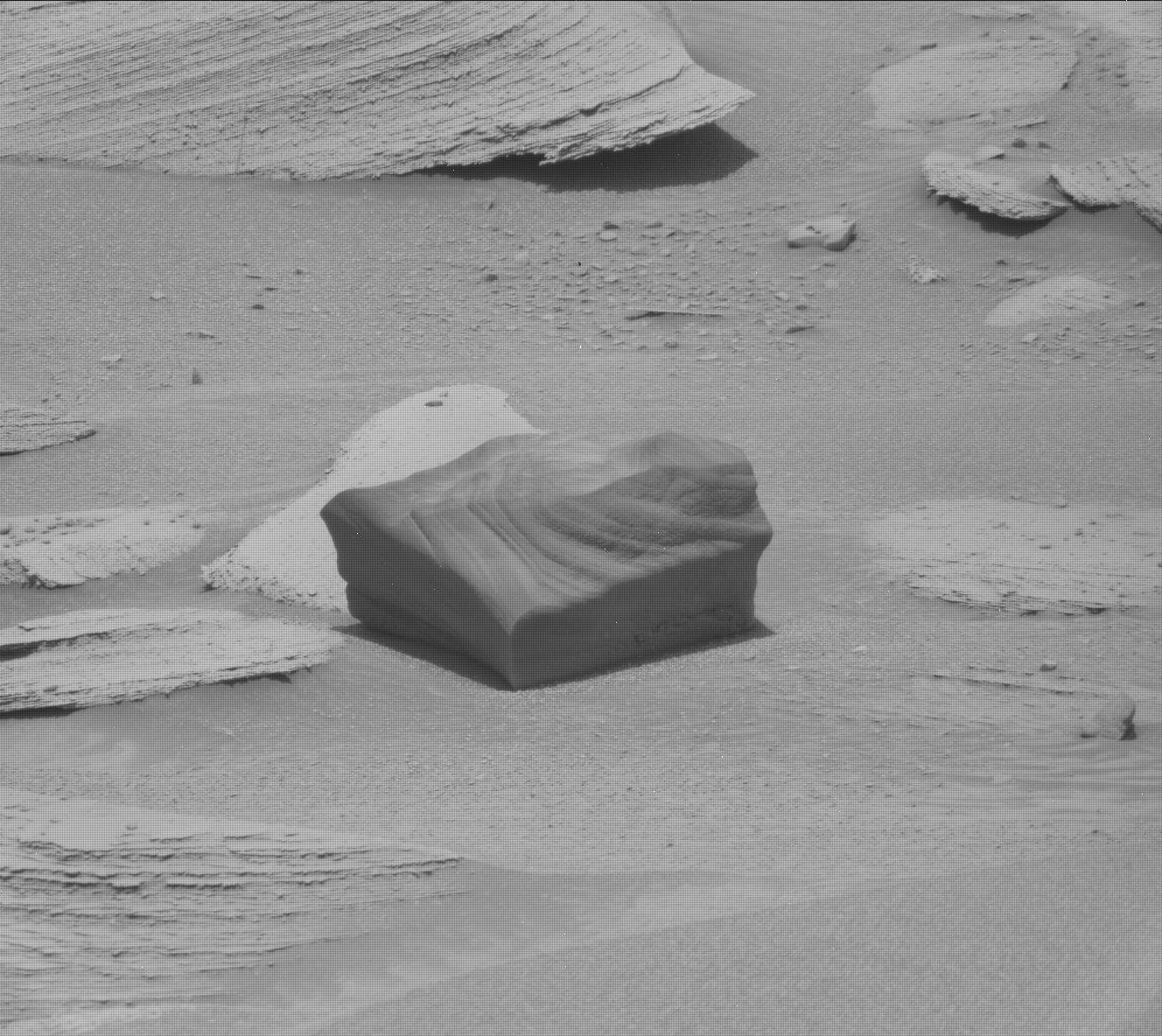
Maintenant accrochez vous.. sur Mars certains blocs de roches ont des dents !!!
Notez leurs dimensions avec l'ombre projetée.
Ces "dents" sont très probablement issues de veines de gypse (ou sulfate de calcium) qui se forment lorsque du gypse précipite dans de l'eau circulant au sein de fines fractures dans la roche. La roche plus tendre ayant subi une longue érosion éolienne, les veines de sulfate de calcium se révèlent en "pics" réguliers hors de la roche où ces structures étaient enfouies.

Eboulis au pied de la butte "Chenapeau"


CHEMCAM - 02 AVRIL 2023 (SOL 3787) :
Avant de démarrer les opérations délicates de téléchargement de la mise à jour de son logiciel en ce lundi 2 avril, le rover a pris le temps d'analyser cette petite roche ronde avec le laser ChemCam
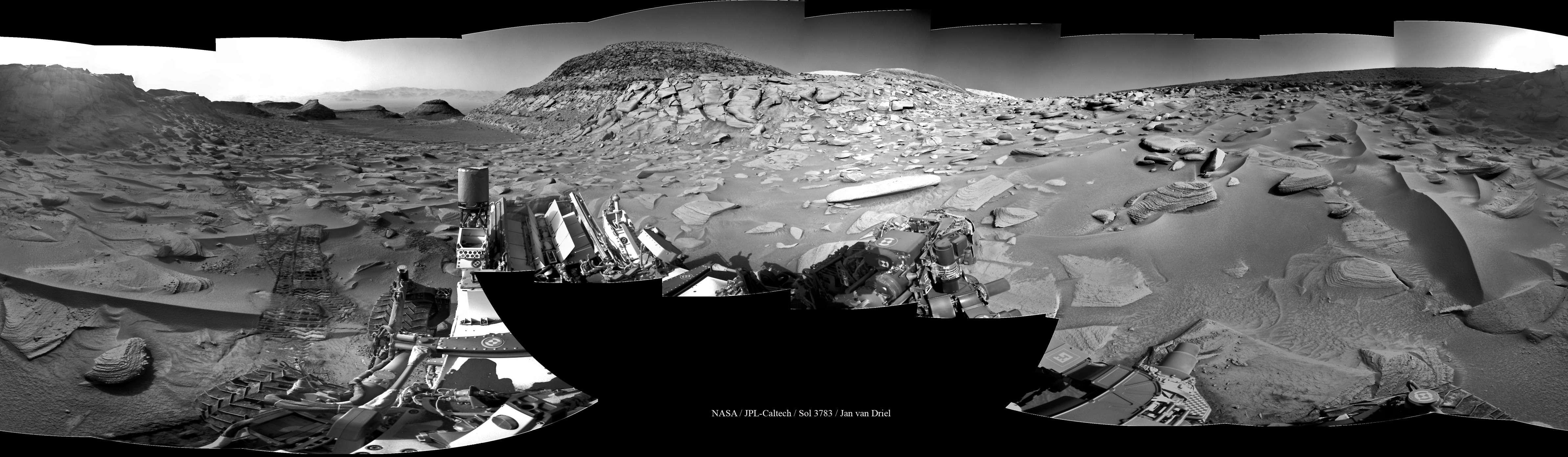
PANOS NAVCAM - 29 MARS 2023 (SOL 3783) - Stuart Atkinson :
Vers l'arrière et le Nord
Au Nord Ouest
PANO MASTCAM – 26 MARS 2023 (SOL 3780) - Neville Thompson :

-
5
-
4
-
3
-
-
Ben non, t'as loupé, c'était à 11h 30 !
-
4
-
-
il y a 38 minutes, PascalD a dit :Dans ce cadre le "présent" de notre esprit est un volume à 4 dimension qui dure quelques centièmes de secondes et occupe environ 1 dm3.
Oui.. OK.. mais bon.. c'est pas très clair comme image
On peut tenter de demander à un un poète..
À Jean Pierre Siméon par exemple
Mais enfin dites-moi
qu'est-ce que c'est
le présent ?
où ça commence où ça finit,
comment ça se dessine, est-ce
un point un cercle un trait
une lumière qui s'éteint
et toujours recommence.
est-ce comme le vent
qui est là sans y être,
l'oiseau qui chante à la fenêtre
et qu'on ne voit jamais.
est-ce ces guillemets,
la porte qui s'ouvre
la porte qui se ferme
entre j'arrive et au revoir.
est-ce une heure est-ce un lieu
une parole un geste un sourire ?
Dites-moi dites-moi
Le présent, vois-tu c'est plus simple
et c'est plus compliqué
le présent c'est
le visage que tu aimes.
-
6
-
3
-
-
Le 31/03/2023 à 14:57, jldauvergne a dit :je pense que le temps reste une donnée à part. Il me semble que pour les physiciens comprendre ce qu'est le temps c'est encore une grande question sans réponse. C'est même un immense paradoxe entre le fait que la notion de temps soit l'une des plus communes qui soit dans la vie courante et que scientifiquement c'est une des choses les moins bien comprises.
En effet, et c'est pourquoi on peut aussi élargir le point de vue et tenter de "penser" le temps sur le plan humain et philo.
Alors osons
, sans prétention, on discute..
Toujours le temps fut porteur d'espoir pour les sociétés humaines. On attend de l'avenir qu’il apporte, selon les cas, apaisement, évolution, maturation, progrès, croissance ou même révolution.
Sachant que le futur deviendra "réel" à l'instant même où il sera "présent".
En attendant, il n’est rien, il est encore à venir, il n'est qu'une possibilité parmi tous les possibles. Et parce qu’il est à venir, ce futur est chargé d'espoirs et remplie d'éventualités, car tout y est encore possible...
Le futur possède donc une irrésistible puissance de séduction, une puissance qui appelle à la projection dans cet ailleurs... Car si finalement nous n’attendions rien du futur, si nous n'avions ni espoir, ni attente, ni crainte ou angoisse, le futur aurait-il un sens ?
Dans ce cadre le passé et l’avenir sont d'abord des représentations de notre esprit, sans réalité propre et objective, et il n’y a de passé et d’avenir que par un PRÉSENT.
Ainsi la vision linéaire du temps qui passe n’a donc pas de réalité en conscience, même si les scientifiques contemporains en appellent à un temps orienté, "une flèche du temps" où s’impose l’irréversibilité des phénomènes..
Tel un instant d'Éternité, le moment présent parvient à transcender le passage même du Temps.
Passé et Avenir, qui hantent l’esprit humain, ne sont alors que des constructions virtuelles face à l’instant présent.
Ainsi que l’énonce Heiddeger : " Seul le présent est, l’avant et l’après ne sont pas ; mais le présent concret est le résultat du passé et il est plein de l’avenir. Le Présent véritable est, par conséquent... l’éternité !!".
-
2
-
2
-
-
"Dernières nouvelles des rovers martiens"
Conférence très récente, et donc actualisée, donnée le 23 mars 2023 au club astronomie d'Eybens dans le cadre du printemps des planétariums par Thomas Appéré (dont j'utilise très souvent les superbes images martiennes, et qui m'avait fait le plaisir d'intervenir sur ce fil) .
Je vous la recommande : c'est parfaitement résumé, très clair et bien illustré..
-
7
-
-
Il y a 4 heures, Superfulgur a dit :Dis, @vaufrègesI3, je pense à un truc, à propos de la conduite de Curiosity : il y a une sorte d'IA, à bord, ou sur Terre, qui lui permet de "mieux conduire" après toutes ces années d'apprentissage, d'aller plus vite ici, d'éviter ci, de passer sur ça, etc etc ?
TROIS OPTIONS pour naviguer sur Mars (une fois que les ingénieurs ont une image claire du terrain) :
1) Conduite "en aveugle"..
Ils peuvent envoyer des informations en mode de "conduite aveugle" dans la mesure où le parcours a pu être reconnu entièrement et en détail par les images, et qu'il ne présente pas de difficultés. La conduite à l’aveugle est la forme de navigation la plus simple disponible. Dans ce mode, le rover suivra les instructions spécifiques qui lui ont été données mais ne fera aucun ajustement en fonction des progrès réels.
2) Conduite en "odométrie visuelle"
Curiosity (et Perseverance) sont équipés d'un système "d'odométrie visuelle", activé ou non, qui est la méthode la plus couramment utilisée. Cette méthode consiste essentiellement à ce que le rover prenne des photos à intervalles réguliers, environ tous les mètres, puis compare les images aux images précédentes pour voir où il s'est déplacé et comment le terrain a changé. L'ordinateur pourra alors lui commander de continuer ou non.
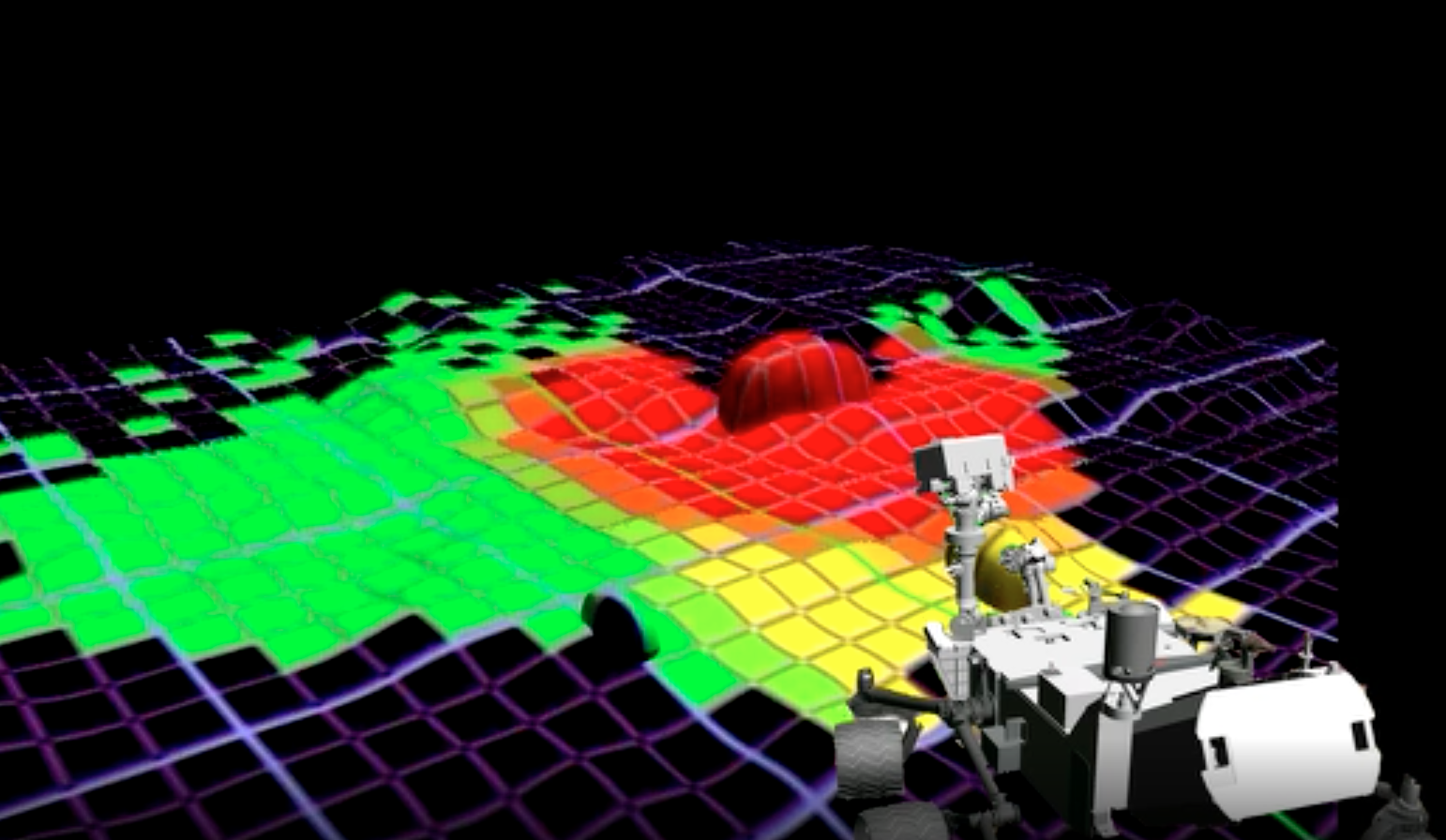
3) Conduite "Autonav"
Curiosity (depuis mars 2013), et plus encore Perseverance aujourd'hui, disposent d'un système de navigation autonome nommé "Autonav".
En revanche, “parce que l’autonav doit s’arrêter fréquemment pour prendre plusieurs images et analyser des données, c’est aussi le mode de conduite le plus lent. Curiosity ne couvre qu’environ trente mètres en une heure en mode de navigation automatique. Toutefois, Perseverance peut conduire au moins deux fois plus vite que Curiosity grâce à de nouvelles ressources informatiques dédiées et de meilleurs algorithmes.
En utilisant ses caméras et ses Navcams embarquées, le rover peut développer une image de son environnement et tracer de manière autonome des chemins sûrs. L’image composite développée par le rover ressemble à l’image ci-dessous, les différentes couleurs indiquant un terrain sûr (vert) ou dangereux (rouge).
https://mars.nasa.gov/mars2020/multimedia/videos/?v=147
Enfin il ne faut pas oublier que la vitesse de ces rovers ne dépasse pas 4 cm/seconde, le plus souvent beaucoup moins quand on active "Autonav" ou "l'Odométrie visuelle".
Noter par ailleurs que Curiosity a aussi été équipé d'un logiciel pour limiter l'usure des roues, ainsi que Perseverance.
Ce sont surtout les deux roues centrales de Curiosity qui ont subies des dégâts. En particulier du côté gauche où un chevron cassé a entrainé un affaissement de la partie centrale de la roue (*).
Quand le rover roule sur un terrain plat, toutes les roues tournent à la même vitesse. Mais quand il y a un obstacle, la roue qui est en avant tire sur la roue qui attaque l’obstacle, et la roue qui est derrière pousse celle-ci sur l’obstacle.
En mars 2017, après 18 mois d’essais au JPL, un nouveau logiciel a été téléchargé sur Curiosity afin de limiter l’usure des roues. Ce logiciel a été testé sur Mars durant plusieurs mois et déclaré bon pour le service le 8 juin 2017.
Ce nouveau logiciel corrige la vitesse des roues en fonction des déplacements de la suspension. Des réductions de 11 à 20% des efforts ont été mesurées grâce à un "contrôleur intelligent" sur l'alimentation électrique de chaque roue et en permettant aux taux de rotation des roues de varier intelligemment en réponse aux conditions détectées. Ce logiciel détecte aussi quand une roue tourne dans le vide et ajuste la vitesse des autres jusqu’à ce que la roue soulevée reprenne contact avec le sol.
(*)Noter que, choquées par l'usure catastrophique des roues, certaines (très) mauvaises langues prétendent que les roues de Curiosity auraient subies un sabotage au sol bien avant le décollage !!... Il est vrai que quand on voit cette image et l'air sournois de l'individu de gauche
 .... heu.. à gauche de l'image j'veux dire ..
.... heu.. à gauche de l'image j'veux dire ..
Je dis ça je dis rien hein...

-
1
-
1
-
5
-
6
-
-
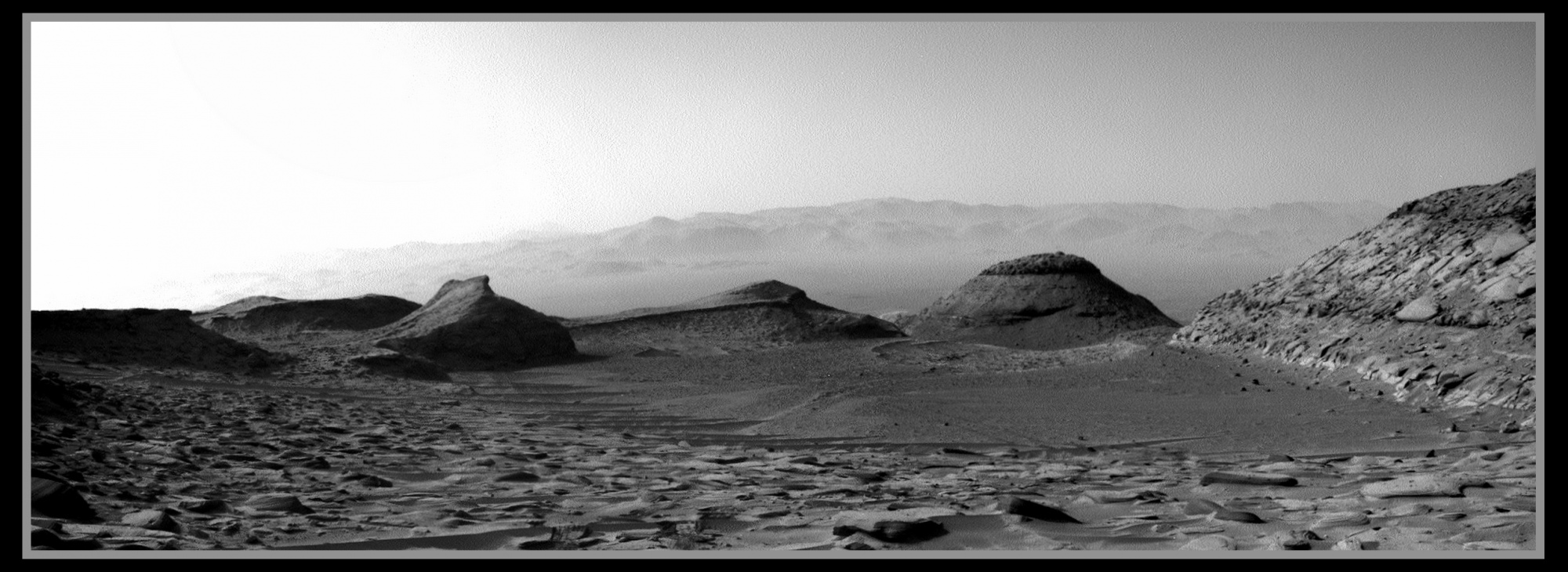
Curiosity est toujours situé à l’extrémité d’une vallée étroite située au-delà de la "Bande de Marquage", une vallée resserrée et constellée de blocs rocheux chaotiques. Le parcours à venir semble en légère montée et se prolonge entre le flanc Ouest tout proche de la butte "Chenapau" et longe les premiers reliefs du flanc Est de la "Crête Gediz Vallis".
Une petite crête semble se dessiner au bout de cette montée.
Le 29 mars le rover a parcouru de nouveau environ 20 mètres vers le Sud en prenant soin d’éviter les plus gros blocs rocheux stratifiés afin de ménager ses roues.
Écrit par Catherine O'Connell-Cooper, géologue planétaire :
"Notre trajet d'aujourd'hui sera relativement court (environ 20 mètres). La conduite dans cette zone est lente. Plutôt qu'un substrat rocheux plat et régulier, nous sommes confrontés à des rochers qui émergent de plaques de sable et à des pierres flottantes qui se détachent à la surface. Certaines dalles rocheuses bougent également lorsqu'on roule dessus, ce qui constitue une véritable course d'obstacles pour les planificateurs du rover".
POSITION AU 29 MARS 2023 (SOL 3783) :
HAZCAM AVANT - 29 MARS 2023 (SOL 3783) :

NAVCAM - 29 MARS 2023 (SOL 3783) :


Le semblant de petite "crête"
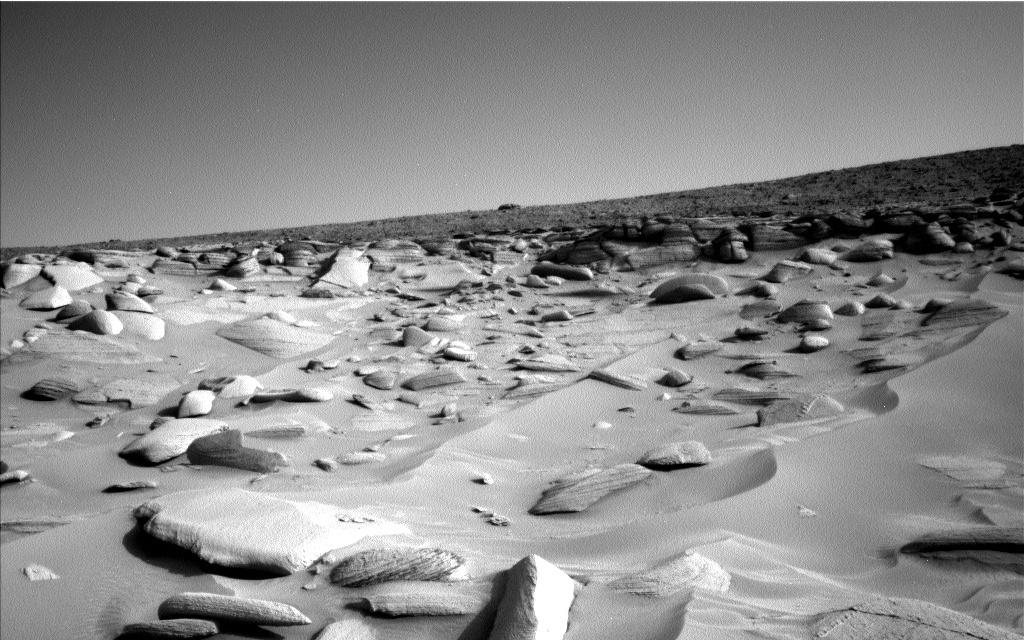
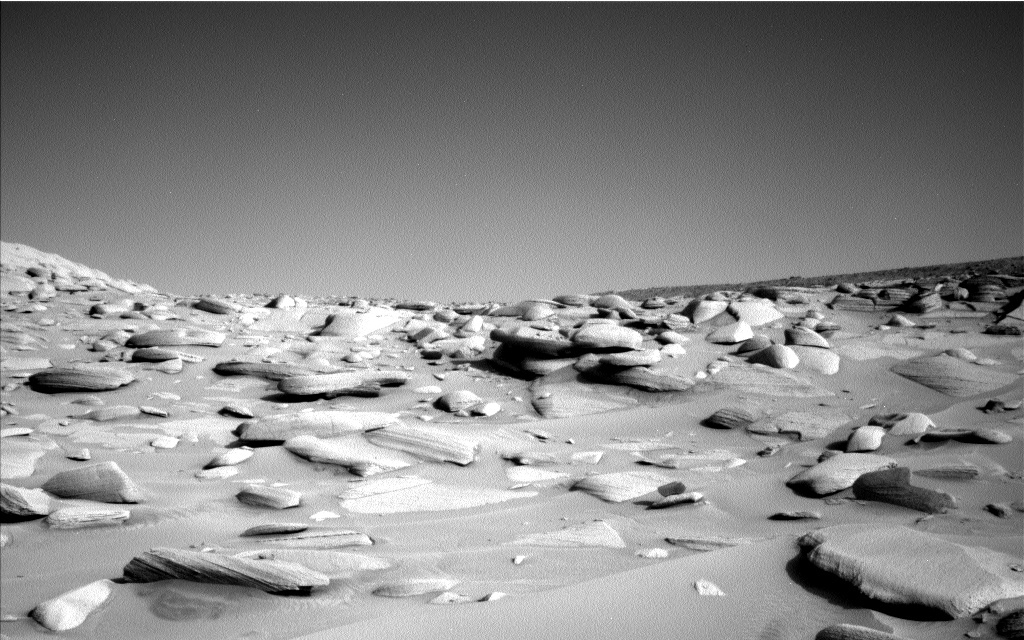
La butte "Chenapau"
MASTCAM - 29 MARS 2023 (SOL 3783) :
Une roche "flottante" très sombre et donc certainement étrangère au substrat natif local.
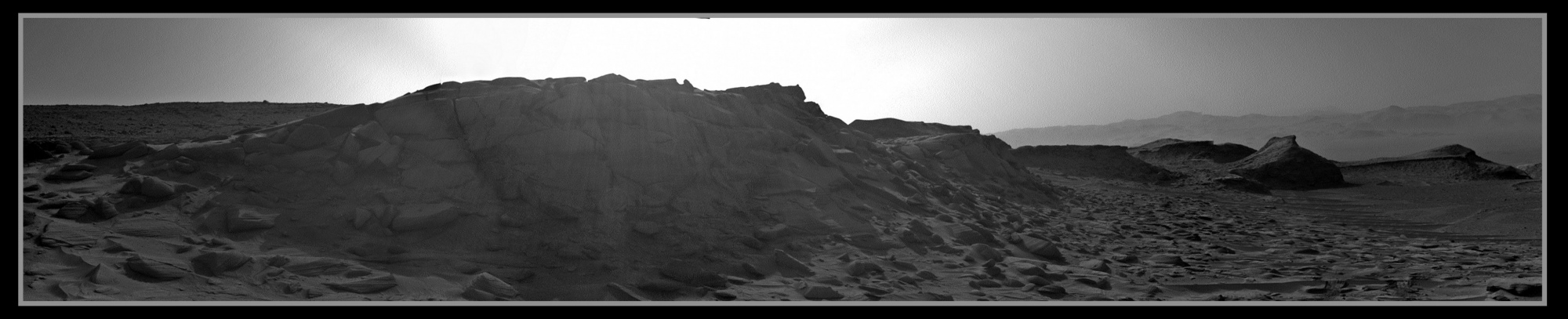
PANO NAVCAM - 29 MARS 2023 (SOL 3783) - Jan van Driel :
Magnifique !
-
5
-
2
-
5
-









Falcon Heavy : l'Odysée de la Tesla dans l'espace
dans Astronomie générale
Posté(e)
https://www.science-et-vie.com/ciel-et-espace/starship-elon-musk-fait-le-point-sur-son-tout-premier-voyage-orbital-100392.html
Extrait :
En cas de succès, le Starship deviendra la plus grande fusée développée par une entreprise privée à atteindre l’orbite terrestre. A ce sujet, Elon Musk joue la prudence. A l’occasion d’une conférence organisée par Morgan Stanley, il a estimé les chances de réussite de ce vol orbital à 50%. « Je ne dis pas qu’il (le Starship, ndlr) atteindra l’orbite, mais je garantis de l’excitation ». Le mois dernier, SpaceX a procédé à un test de mise à feu statique de 31 des 33 moteurs Raptors du booster Super Heavy qui doit propulser le Starship dans l’espace.
80% de chances d’atteindre l’orbite en 2023, selon Elon Musk
En cas d’échec de ce premier vol orbital, SpaceX a prévu d’effectuer d’autres tentatives courant 2023. « Je pense que nous avons environ 80 % de chances d’atteindre l’orbite cette année », a ajouté Elon Musk, estimant qu’il « faudra probablement quelques années de plus pour parvenir à une réutilisation complète et rapide » du Starship.