Le télescope Vixen 150/750 est équipé d'une platine à crémaillère pour la mise au point. Ce système très correct en visuel n'est pas suffisamment efficace dans le cas de la photographie planétaire. Il a donc fallu trouver une solution électromécanique pour faire une mise au point précise sur une caméra de type "planétaire".
Il existe des systèmes hélicoïdaux de mise au point pour la macrophotographie. On en trouve courament au pas M42 x 1 avec diverses possibilités d'extension. Le modèle 17 - 31mm a été retenu.
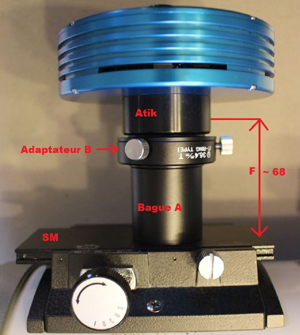
Le but est de fixer ce dispositif de mise au point entre la platine du Vixen et une caméra Atik, et de l'actionner grace à un moteur électrique. Les supports et divers éléments nécessaires seront réalisés par impression 3D
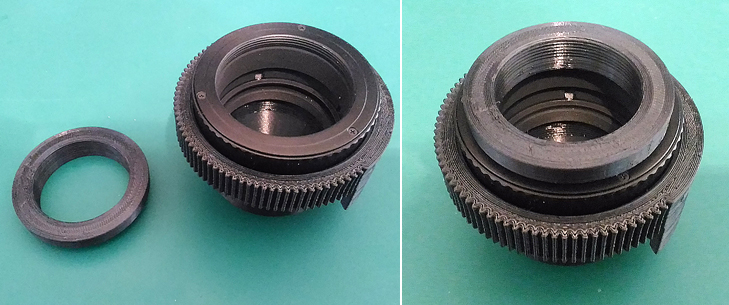
L'élément central est donc une bague de mise au point hélicoïdale mâle et femelle en 42 à vis (M42 x 1). On peut commander cette pièce sur internet, par exemple ICI. |
|
|
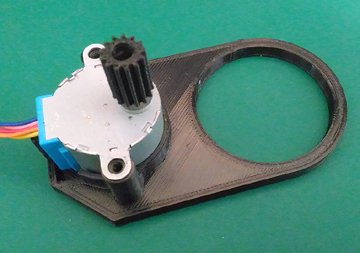
La motorisation est faite grace à un petit moteur pas-à-pas intégrant un réducteur 64x. Cela permet d'avoir un mouvement doux, précis et avec un couple élevé. Une interface de puissance est fournie avec le moteur. Elle peut être directement pilotée par des signaux logiques provenant d'un microcontrôleur.
Exemple de fournisseur de ces moteurs ICI |
|
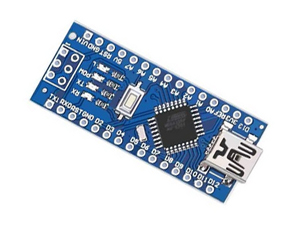
| Le microcontrôleur est un Arduino Nano. Il fournit les signaux nécessaires pour le fonctionnement du moteur et - par exemple - peut prendre en compte des "fin de course". Il est alimenté en 5 Volts.
On peut le trouver par exemple ICI
Sa programmation se fait via un port USB. L'environnement de développement gratuit (IDE Arduino) est téléchargeable sur internet. |
 |
Il faut évidemment prévoir un petit boitier, quelques boutons poussoir, éventuellement un potentiomètre, et un peu de fil de cablage pour faire une raquette de commande (A faire selon son goût)
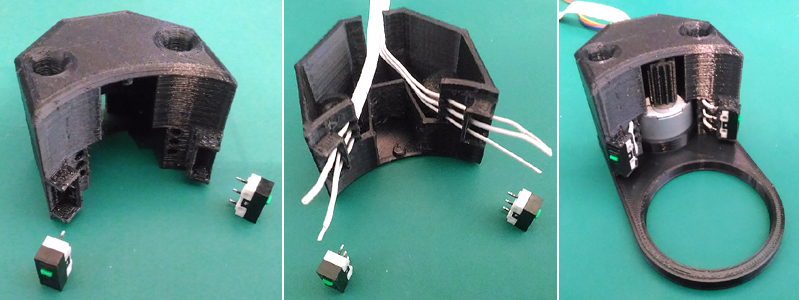
Il faut aussi 2 contacteurs (micro switch) que l'on peut récupérer dans une vieille souris d'ordinateur, par exemple.
| |
La bague à mouvement hélicoïdal doit etre entrainée par le moteur. Il faut donc faire une couronne dentée sur cette bague et un pignon qui se fixe sur l'axe du moteur. Il faut tenir compte du déplacement longitudinal de la couronne dentée lors de la rotation afin de donner au pignon une longueur suffisante. Ce déplacement est de 31-17 = 14mm
La couronne dentée devra être monteé à frottement dur sur la bague, au niveau des crans de préhension. 2 trous sont prévus pour mettre de petites vis sans tête si besoin.
Afin de ne pas déteriorer les dents du pignon ou de la couronne, il est prévu de placer des contacteurs de fin de course pour stopper le mouvement. Une butée cylindrique est adjointe à la couronne pour déclencher les contacteurs
Le pignon a 13 dents et la couronne 96 dents
|
|
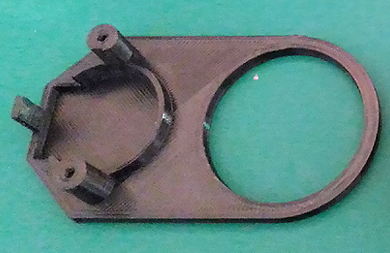
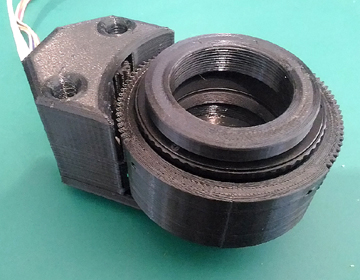
On réalise ensuite une base pour positionner le moteur et la bague correctement et fermement. Le moteur s'insère dans un logement et ses pattes de fixation seront vissées ultérieurement. |
|
|
|
La partie focuser doit encore recevoir une bague d'adaptation 42 x 1 femelle / 36.4 x 1 mâle avant de s'insérer dans la base et de se visser dans la platine métallique du Vixen. |
|
Le moteur est recouvert d'un carter ayant pour fonction de fixer le moteur à l'aide de 2 vis, de guider le pignon, de supporter les 2 contacteurs de fin de course, de laisser un passage au cablage et accessoirement assurer une protection contre les chocs et la condensation.. |
| |
Il reste encore une bague d'adaptation à imprimer, qui fera le lien entre le focuser et la caméra. Cette bague est filetée en 42 x 1 mâle d'un côté et 36.4 x 1 femelle de l'autre. |
| |
Le focuser peut être inséré dans la base et vissé sur la platine. (attention à ne pas serrer exagérément, le filetage en plastique pourrait ne pas apprécier)
Veillez à bien positionner la butée afin de profiter de toute la course de rotation.
Vidéo du focuser sur Youtube
|
|
|