Quelques jours plus tard, je parvenais enfin à un réglage correct et je faisais mon petit compte rendu à Andrew, Dick et Jean-Marie...
Michel (à Jean-Marie...) :
Pour ma part, je considère que j'ai abouti !
Samedi, ça démarrait pourtant mal : à peine le matériel mis en route, faux contact, l'Autostar reboote !
La PEC doit donc avoir perdu ses repères. Ma jolie courbe lissée, moyennée,fignolée, ne sert plus à rien !!! J'applique alors la méthode d'Andrew :
nouveau training rapide, chargement de la courbe obtenue dans myscope et comparaison avec mes anciennes données : celles-ci apparaissent décalées de 37 points sur 150, preuve que le reboot a bien un effet dévastateur. Grâce à l'appli d'Andrew, je décale ma "jolie courbe" et je réinjecte les données
recalées dans l'Autostar.
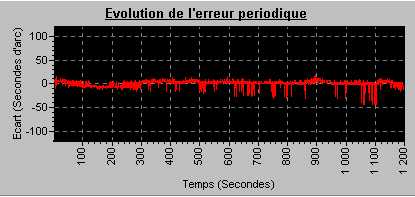
J'enregistre alors le suivi d'Arcturus (graphe ci-joint). Le suivi est un peu hésitant pendant les 5 premières minutes, et puis, il est quasi parfait pendant les 15 minutes suivantes. Il faut faire abstraction des pointes liées à la turbu et à la dérive en déclinaison (ma MES est moyenne) :
lorsque je réaligne en déclinaison (ex à 1100 sec) les pointes disparaissent.
...et à Andrew :
I made final adjustments to my PEC saturday night.
It began quite wrong : as I hardly had turned on all my equipment, a short electric cutoff occured and the Autostar rebooted...
All my nice averaged, smoothed and tweaked curve was good for the trash bin !
So I made a new (very) rough train, loaded the data into MyScope, summarized and compared with my good old data and found those were now 37 points offset. Rebooting thus proves to be desastrous for those poor people who don't have MyScope !!!
Shifted my old data to due point and reloaded them, set custom tracking rate to +12 and recorded the tracking of Arcturus during 20 min (see graph attached)
The result is almost perfect. Tracking seems a little irregular during the first five minutes and then the line becomes quite straight and horizontal. The small spikes on the line are due to turbulence, and the bigger ones to declination drift (my alignment is not perfect, when I correct the dec drift, at t=1100 for example, the spikes disappear).
Andrew :
Bloody marvellous, considering the mechanisms involved.
And thank you for doing the testing.
24mins per train and sloppy gearing doesnt make doing ETX testing very useful. (Note : Andrew has an ETX whose wormgear period is 24min)
Keep trying different things and let us know if you find any problems in the future
Conclusions et réponses aux questions posées :
1 – comment être certain de ne pas perdre les corrections enregistrées ou les rendre inopérantes (voir contre productives) par exemple lorsqu'un reboot de l'Autostar fait perdre à celui-ci la correspondance entre les corrections à apporter et le point précis de la vis tangente où il faut les apporter ?
:
Pour ne pas perdre le calage lorsqu'on recharge des données dans l'Autostar (par exemple les courbes traitées dans MyScope, il faut avoir mis à jour le firmware de celui-ci avec la dernière version de Meade (actuellement v34Ec) préalablement traitée avec le patch correspondant de Dick Seymour (actuellement patch34cc). Ainsi modifié, le programme de commande de l'Autostar ne reboote plus lorsqu'on y charge de nouvelles données (attention toutefois, le reboot est inévitable dès qu'on recharge un nouvelle version du firmware, patchée ou non, que ce soit avec l'Austostar Updater (ASU) de Meade ou avec le logiciel Starpatch)
En cas de reboot intenpestif (coupure de courant, ou chargement d'une nouvelle version du firmware), tout n'est pas perdu !!!
Si la précaution a été prise de conserver une sauvegarde sous forme de fichier .rom des données de la PEC , il suffit de refaire un training très rapide, d'en charger les données dans MyScope, de les visualiser en mode "summarize" et "smoothing" en les comparant avec les jeux de données qu'on veut récupérer.
Une petite case à cocher permet de décaler ces dernières du nombre de point nécessaire (de 0 à 150) pour les remettre en phase avec le nouveau calage. On sauvegarde la courbe ainsi recalée et on la réinjecte dans l'Autostar. Le tour est joué !
2 – comment affiner les réglages de PEC encore plus précisément qu'avec les procédures internes de l'Autostar (PEC update) ?
Le PEC update permet de moyenner différentes sessions de training. Mais il le fait en aveugle, sans visualiser si, par exemple, l'une des sessions a été affectée par une forte turbulence... De plus, le processus est irréversible, si on est dérangé au beau milieu du training n°N, on continue à moyenner ses données avec celles enregistrées précédemment.
Le logiciel MyScope (outre la possibilité de visualiser toutes les informations et options chargées dans l'Autostar) permet de faire la même chose de manière interactive, en visualisant et en sélectionnant les données qu'on va moyenner. Il suffit de faire plusieurs trainings indépendant (sans passer en mode update) et d'en enregistrer à chaque fois les données sous forme de fichier .com sous MyScope. On charge ensuite les différentes courbes obtenues (jusqu'à 4), on les visualise en mode "summarize" (qui donne l'intégrale des corrections apportées, alors que le mode de base donne le différentiel de correction point par point), on décide lesquelles on veut retenir pour les moyenner, et on peut lisser la moyenne obtenue pour atténuer encore le bruit de guidage. Quand on repasse cette moyenne du mode "summarize" au mode normal, on voit que les corrections apportées sont minimisées : juste ce qu'il faut pour opérer un suivi aussi fluide que possible. On recharge alors ces données dans l'Autostar et on en garde précieusement une copie au cas où... (voir ci-dessus)
MyScope possède également un onglet de visualisation de l'image webcam et une émulation des touches de l'Autostar qui permet de réaliser et d'enregistrer le guidage directement sur l'ordinateur (pas encore testé).
Pour ceux qui n'aiment pas trop l'anglais et/ou qui veulent gagner du temps dans la mise à jour de l'Autostar et leur apprentissage de MyScope, j'ai écrit un petit mode d'emploi qu'on peut aussi télécharger ici au format word.
3 – quelles sont les relations entre le réglage de la correction d'erreur périodique (PEC train) et celui de la dérive constante liée à différents facteurs dont le premier est la vitesse du moteur (Custom tracking rate) ? Peut-on envisager que le réglage de PEC prenne en charge à la fois l'erreur périodique et la dérive ?
Bien que les versions récentes du firmware de l'Autostar soient supposées normaliser les données de la PEC (la somme des corrections devrait alors être égale à zéro), mon expérience semble montrer que ce n'est pas toujours le cas. La courbe de PEC enregistre donc à la fois la correction d'erreur périodique et au moins une partie de la correction la dérive constante liée à la vitesse du moteur. Le fait de moyenner plusieurs sessions permet de minimiser cet effet. L'expérience m'a montré que le mieux était d'abord d'obtenir une courbe correcte, puis de corriger la dérive au moyen du custom tracking rate.
On doit alors enregister une courbe de suivi qui, en faisant abstraction des oscillations liées à la turbulence et à la dérive en déclinaison liée à un éventuel défaut de mise en station, doit avoir une allure aussi droite et aussi horizontale que possible :
Un dernier conseil : faites vos entraînements de PEC avec un télescope bien équilibré et sur une étoile proche du méridien. Ayant négligé cet élément, j'avais fait mes réglages sur une étoile qui avait dépassé le méridien depuis 4 heures alors que mon télescope était très légèrement plus lourd à l'arrière (déséquilibre pourtant insensible avec l'embrayage desserré, les frottements suffisant à empêcher l'axe d'ascension droite de tourner sous son effet). La compensation de cet effort supplémentaire nécessitait pourtant un réglage du custom tracking rate à +12. A la session suivante, j'étais très étonné que ce même réglage fasse tourner la monture beaucoup trop vite. Mais le nouvel objet pointé était tout près du méridien, annulant ainsi l'effet du déséquilibre.
On peut s'énerver assez longtemps avant de comprendre pourquoi le tracking rate nécessaire semble varier d'une session à l'autre...
FIN