Dans ma longue quête de la bonne mise au point, j'ai tenté le bricolage d'un chariot mobile télécommandé sur lequel est fixé l'électronique de cette chère petite webcam.
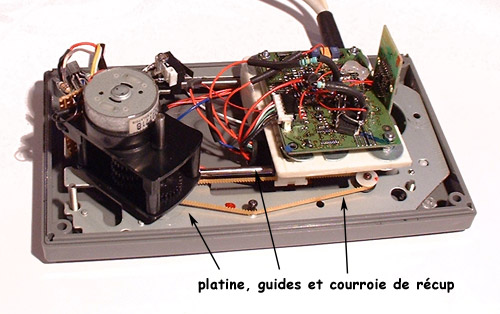
Le chariot a été récupéré
sur un lecteur de CDROM où seuls les guides et le support de la partie
mobile ont été conservés. Après moult essais de
démultiplication de la vitesse de déplacement du système
d'origine, j'ai finalement renoncé au "100% bricolage" et acheté
un petit motoréducteur Minilor qui est impec. (j'ai quand même
changé le moteur pour un autre moins encombrant).
Le système se pilote directement avec Astrosnap a l'aide d'une petite
interface pas dure à bricoler, ce qui permet l'autofocus (très
rigolo). Il se pilote aussi en manuel avec deux boutons en // de l'interface.
Le gros avantage de ce bricolage est sa course de mise au point de 30mm, ce qui permet de défocaliser suffisament pour pouvoir faire un réglage de collimation sans toucher au miroir primaire sur un SC. Ceci évite tout "shifting" du miroir et fiabilise un peu plus la collimation.
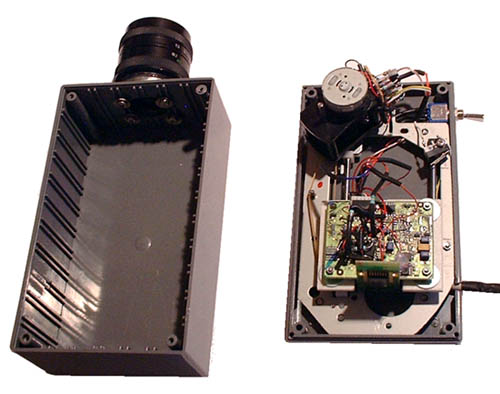
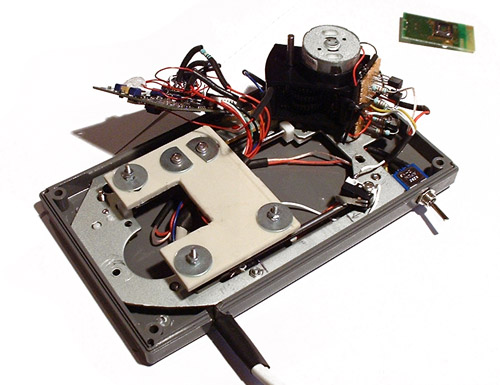
vue générale de l'engin:
le bestiau dénudé...
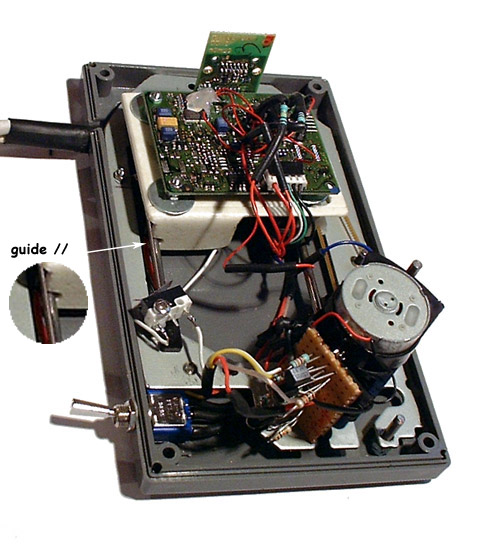
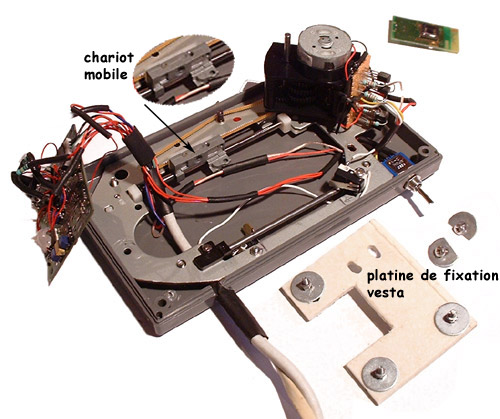
un peu de détails...

il est plus facile de façonner un nouveau
guide // dans la platine de fixation de la vesta que de chercher à récupérer
celui d'origine
Pour une commodité de réglage,
j'ai préféré percer des trous beaucoup plus grand dans
la platine, et mettre des grandes rondelles. Ca laisse une bonne marge de sécu
pour régler le centrage du capteur par rapport à l'ouverture.
La hauteur du capteur s'ajuste à l'aide des écrous sur la platine.
pour le schéma de l'interface, je ma suis plus que grandement inspiré de celui de l'interface d'Etienne Bonduelle. Celui-ci permet d'alimenter le tout via l'USB et n'utilise pas de relais.
Si vous utilisez un moteur de récup. assurez-vous qu'il tourne avec 2V d'alim. La tension aux borne du moteur avec ce schéma ne dépasse pas 3V.