
Un
Plan d'Expériences pour améliorer mon Autoguidage
Le but de ce
chapitre est de partager mon expérience vis à vis de l'autoguidage. Ma
problématique est simple : mes résultats en terme d''autoguidage avec la FS102 et
l'EM200 sont à ce jour (mai 2013) mauvais comme vous pouvez le constater ci dessous (les erreurs sont exprimées en pixel).
Copie d'écran du
29/11/2011. Prise de vue de NGC6992
Vous allez pouvoir
suivre ici mois après mois mes réflexions pour améliorer cette situation.
MAI 2013, un peu
de théorie
Commençons par
calculer le temps à partir duquel l'autoguidage doit se déclencher (MIN MOVE)
pour ne pas autoguider lorsque cela n'est pas nécessaire.
Avec la FS102 + le
réducteur, la DMK21AU04 et l'Atik 16IC-S
Calcul de la focale de l'instrument imageur : 820mm x 0,78 = 640 mm à confirmer
sur le terrain
Calcul de la focale de l'instrument guideur : 640 mm
à confirmer sur le terrain
Taille des pixels de l'instrument imageur : 8,3 µm
Taille des pixels de l'instrument guideur : 5,6 µm
Calcul de l'échantillonnage exact de l'instrument imageur
: 206 x taille des pixels / focale de l'instrument = 206 x 8,3 / 640 =
2,67 ''/pixel
Calcul de l'échantillonnage exact de l'instrument guideur
: 206 x 5,6 / 640 = 1,80 ''/pixel
On veut que
l'autoguidage se mette en action lorsque la dérive atteint 75% de
l'échantillonnage de l'imageur soit 2,67x0,75 = 2,00 ''
2,00 '' cela
est équivalent à un déplacement de 2,00 / 1,80 = 1,11 px = +/- 0,56
px (dans l'une ou l'autre des 2 directions -X / +X ou -Y / +Y
possibles) sur la caméra de guidage.
A la vitesse de
rattrapage de la monture (0,5 x vitesse sidérale) il
faut 0,56 x 1,80 / (15,04 x 0,5) = 0,13 secondes de rattrapage
ou plus simplement
On veut que
l'autoguidage se mette en action lorsque la dérive atteint 75% de
l'échantillonnage de l'imageur soit 2,67x0,75 = 2,00 ''
A la vitesse de
rattrapage de la monture (0,5 x vitesse sidérale) il
faut +/-1,00 / (15,04 x 0,5) = 0,13 secondes de rattrapage
Poursuivons avec
le calcul du temps maximum d'autoguidage (MAX MOVE) pour ne pas déplacer
exagérément la monture en cas d'erreur (lorsqu'un rayon cosmique touche le
capteur de la CCD de guidage par exemple). Dans ce cas, on ne veut pas que
l'autoguidage n'aille au-delà de 3 fois l'échantillonnage de l'instrument guideur soit 1,80 x 3 = 5,4 ''.
A la vitesse de
rattrapage de la monture (0,5 x vitesse sidérale) cela
correspond à 5,4 / (15,04 x 0,5) = 0,72 secondes de rattrapage
Récapitulatif en fonction des principales configurations utilisées
|
|
FOCALE IMAGEUR |
FOCALE GUIDEUR |
ECHANTILLONNAGE
IMAGEUR |
ECHANTILLONNAGE
GUIDEUR |
MIN
MOVE |
MAX
MOVE |
|
FS102 +
réducteur, Atik 16IC-S, DMK21 |
640 mm |
640 mm |
2,67 ''/px |
1,80 ''/px |
0,13 sec |
0,72 sec |
|
FS102, Atik 16IC-S, DMK21 |
820 mm |
820 mm |
2,09 ''/px |
1,41 ''/px |
0,10 sec |
0,56 sec |
|
FS102 + réducteur,
350D, DMK21 |
640 mm |
640 mm |
2,06 ''/px |
1,80 ''/px |
0,10 sec |
0,72 sec |
|
Obj.
300mm + 350D en piggy back, guidage FS102 + DMK21 |
300 mm |
820 mm |
4,39 ''/px |
1,41 ''/px |
0,22 sec |
0,56 sec |
On retiendra donc
pour une utilisation usuelle de la lunette avec l'Atik
ou le 350D : MIN MOVE = 0,1 sec et MAX MOVE = 0,7 sec.
Cela signifie
qu'il n'y a pas de rattrapage si le déplacement de l'étoile guide est
inférieure 0.1 sec x 15,04 x 0,5 / 1,80 = +/- 0,42 pixel sur la caméra de
guidage.
Par ailleurs et
dans un premier temps je réglerai les valeurs "AGGRESIVENESS" sur 7
et le temps de pose de la caméra d'autoguidage sur 3 secondes (afin de moyenner
la turbulence) ; valeurs communément admises dans la littérature et sur
internet.
VERIFICATIONS A REALISER, valeurs par défaut utilisées de mai 2013 à juillet 2014
|
PARAMETRES |
RESULTAT |
|
calculer la focale exacte de l'instrument imageur |
à faire |
|
calculer la focale exacte de l'instrument guideur |
à faire |
|
vérifier la vitesse mini RATE 1 sur le FS2 = 0,5x |
OK |
|
vérifier le paramètre MIN MOVE = 0,1 sec |
OK |
|
vérifier le paramètre MAX MOVE = 0,7 sec
|
OK |
|
vérifier les paramètres AGGRESSIVENESS = 7 |
OK |
|
régler le temps de pose autoguideur =
3 secondes
|
OK |
LE PLAN D'EXPERIENCES
1. L’identification des facteurs
4. Le Design du Plan d'Expériences
5. La Mise en Œuvre du Plan d'Expériences
Pour analyser mes
problèmes d’autoguidage, j’avais prévu initialement de réaliser une quinzaine
d’essais successifs en faisant varier à chaque fois un paramètre. Puis je ne
sais pas pourquoi, j’ai décidé de me lancer dans la réalisation d’un Plan
d’Expériences bien que n’en n’ayant jamais fait et n’étant pas
statisticien !
Un Plan d’Expériences c’est quoi ? Pour le découvrir je vous conseille de lire cette page web très simple et facile à comprendre. Nous allons réaliser notre PE en déroulant la démarche ainsi décrite.
La finalité du PE, c'est de modéliser un processus sous forme d'équation Y = f(x) ou Y= Constante + a1x1 + a2x2 + a3x3 + ...
Le processus c'est dans notre cas la qualité de l'autoguidage.
1.
L’identification
des facteurs
Il s’agit de déterminer les facteurs qui influent l’autoguidage (les « x », les inconnues). Pour ma part j’en ai retenu 6. Je les ai choisis par expérience, vous pouvez en choisir d’autres.
Quelques règles à respecter : il faut que vous puissiez agir dessus. Par exemple la turbulence du ciel ne peut pas être un facteur influent pour le PE.
Il faut que tous ces facteurs soient indépendants les uns des autres : quand sur le terrain vous modifierez la valeur d’un de ces facteurs, cela ne doit pas entrainer la modification d’un autre facteur.
Voici les 6 facteurs influents retenus :
La fréquence
d'autoguidage qui est en fait donnée par le temps de pose de l'étoile guide
La luminosité de
l'étoile guide
Le PEC
La position du
contrepoids
Le "MIN
MOVE"
L' "aggressiveness"
Nous allons
maintenant attribuer une valeur basse et haute à chacun de ces 6 facteurs. Ces
valeurs hautes / basses peuvent être numériques ou alphanumériques.

Je n’ai pas retenu
comme facteur influent la focalisation de l’étoile guide (focalisée / défocalisée). Comme je guide par diviseur optique, une
étoile défocalisée se traduit immédiatement par une
étoile à la forme bizarre ! De plus, défocaliser
l'étoile guide aura une influence sur la luminosité de l'étoile.
Je n’ai pas non
plus retenu le logiciel utilisé comme facteur (par exemple MaximDL
/ PHD Guiding).Tout d’abord cela n’aurait pas de sens
dans le cadre d’un Plan d’Expériences et j’ai considéré que les conclusions
réalisées avec MaximDL seront également valables avec
PHD Guiding.
J’ai lu sur
Internet http://www.dinastro.org/spip.php?article37
que certains astronomes décentrent la mise en station de façon à ce que le
rattrapage en déclinaison se fasse toujours dans le même sens. Il s’agit par
contre d’un paramètre qui aurait pu être retenu.
Problématique de l’étoile guide
Il faut une étoile guide qui soit saturée à une seconde de pose; mais qui ait aussi une faible intensité avec 3 secondes !!! Pour ce faire j’ai utilisé plusieurs (4) étoiles guides au cours de ma soirée de réalisation du PE.
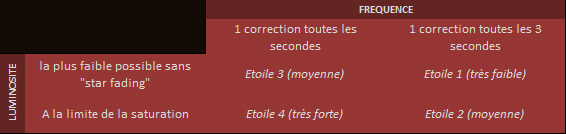
Luminosité étoile 1 = Luminosité étoile 3
Luminosité étoile
4 = Luminosité étoile 2
Avec le recul et si
cela vous semble trop difficile à mettre en œuvre, je pense que c’est un
facteur que vous pouvez éliminer.
Interaction des facteurs
Il arrive que l’un
des facteurs renforce l’effet de l’autre sur la réponse. Cela s’appelle une
interaction. A priori il n'y a pas d'interaction entre ces 6 facteurs. Si vous ne comprenez
pas ce qu'est une interaction vous pouvez
lire le chapitre 2.2 de ce document
qui comporte un exemple explicite.
Dans mon cas, le
processus étudié est « L'autoguidage via un diviseur optique d'une lunette
FS102 avec réducteur (640mm à f/d 6.3) sur EM 200 »
J’ai à priori envisagé
d’étudier plusieurs réponses « Y ». Tout d’abord MaximDL
nous donne les moyennes quadratiques sur un intervalle de temps de 4 minutes
maxi des dérives en X et en Y ; MaximDL donne
également les valeurs maximum (Peak) en X et Y. Mais
ce qui importe le plus c’est le résultat final, l’image. J’ai donc retenu le
FWMH de l’image et le ratio longueur / largeur des étoiles qui caractérise l’élongation
des étoiles. Ces deux valeurs seront mesurées avec le logiciel CCDInspector.
En conclusion pour cette première partie nous obtenons la représentation suivante

4. Le Design du Plan d'Expériences
Nous avons 6 facteurs de 2 niveaux chacuns, cela donne 2^6 = 64 combinaisons possibles, représentées graphiquement de 2 façons ci dessous.
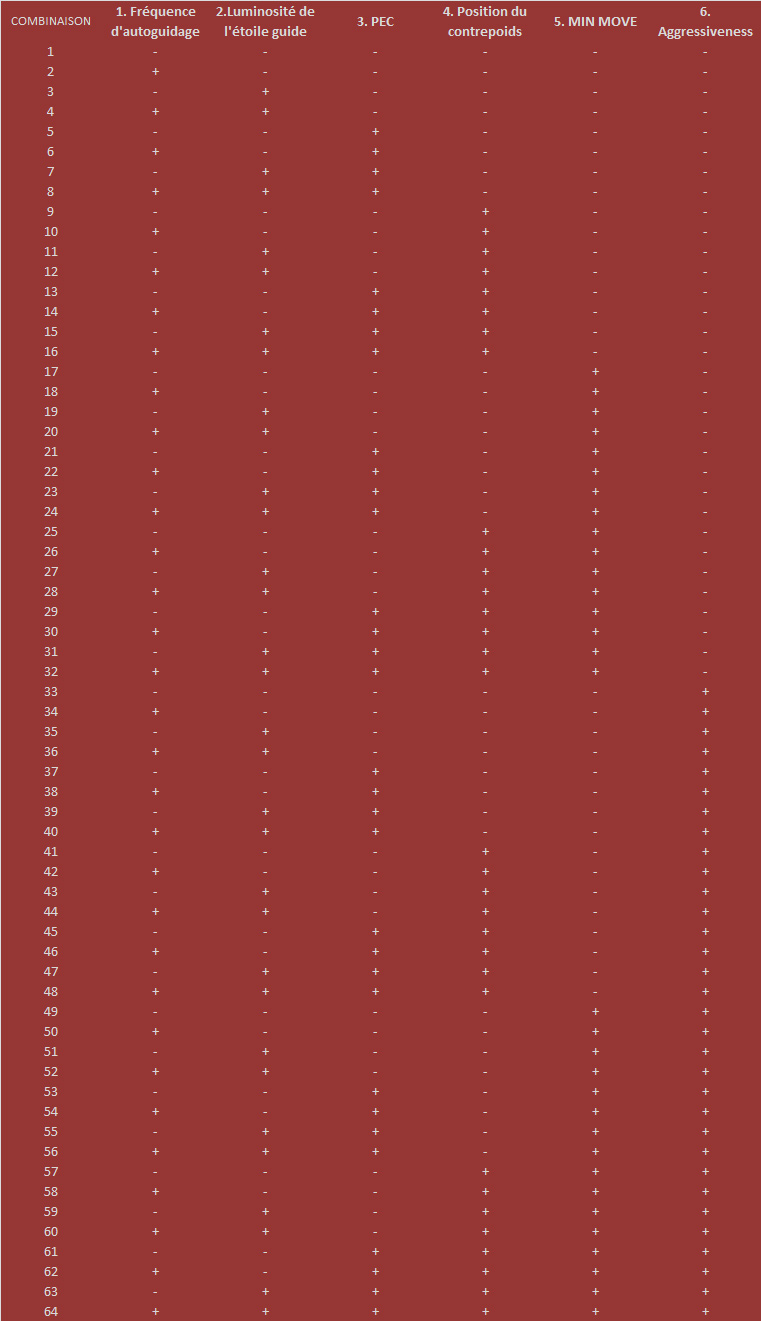

Il n'est bien sûr pas question de réaliser 64 essais. Nous avons 6 inconnues -les coefficients des 6 facteurs influents- et en théorie 6 essais suffisent ! Pour ce faire nous allons utiliser une table de Taguchi à 8 essais. Par convention le niveau bas est -1 et le niveau haut +1.

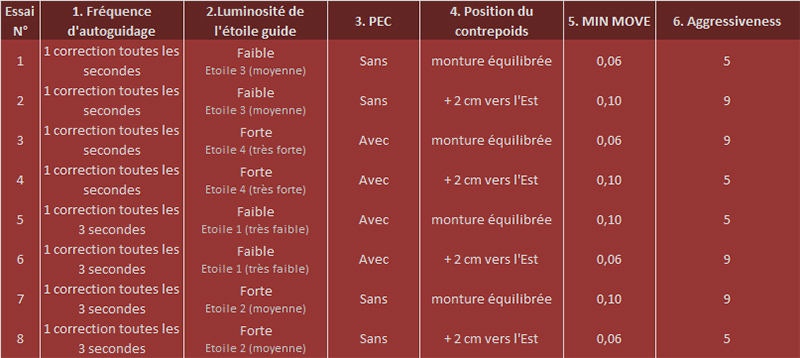
En remplaçant les niveaux haut et bas par leurs valeurs et en complétant la luminosité de l'étoile guide par l'étoile choisie, nous arrivons aux 8 essais à réaliser suivants :
5. La Mise en Œuvre du Plan d'Expériences
Nous allons dans ce chapitre préparer notre séance d'observation.
Tout d'abord nous avons 8 essais à réaliser. Sur l'EM200 la vis sans fin fait un tour en 8 minutes, nous ferons donc 8 essais de 10 mn plus une fois 8 mn pour l'apprentissage du PEC. Cela fait une séance de 01h30 à 02h00 au total. Cette durée est compatible d'une seule nuit d'observation pour avoir des conditions de turbulence constantes autant que possible.
Nous allons avoir 8
essais de 10 minutes à réaliser, autant en profiter pour photographier un objet
céleste. Les occasions d'observer sont rares et tant pis si le guidage ne sera
pas toujours tiptop ! Cet objet devra :
- Etre au sud loin de la polaire, c'est là que guider est le plus exigeant
- Ne pas changer trop d'altitude pendant 2 heures de temps, pour que les
résultats ne soient pas faussés par une variation de la turbulence atmosphérique
- Etre bas sur l'horizon, pour avoir des conditions plutôt moyennes de
turbulence
- Etre dans un champ riche en étoiles car il faut 4 étoiles guides différentes
- Etre photographié de préférence avec l'ATIK16 IC-S (pas de dark)
- Etre compatible de poses de 10 minutes avec ou sans filtre Halpha
Finalement mon choix s'est porté sur NGC6822, la Galaxie de Barnard dans le Sagittaire.
Il n'était pas question non plus de faire les 8 essais dans l'ordre donné par la table de Taguchi. Notamment, il est hors de question de changer la position du contrepoids à chaque essai. J'ai donc réorganisé les 8 essais suivant une séquence facile à mettre en œuvre sur le terrain. Les 4 essais avec la monture équilibrée ont été réalisés en premier (de A à D) , puis les 4 essais avec le contrepoids déplacé vers l'Est (de E à H). Sur le tableau ci dessous, les facteurs à modifier entre chaque pose sont indiqués en rouge sombre.

Il ne me restait plus qu'à écrire une check-list pour faciliter l'exécution sur le terrain.

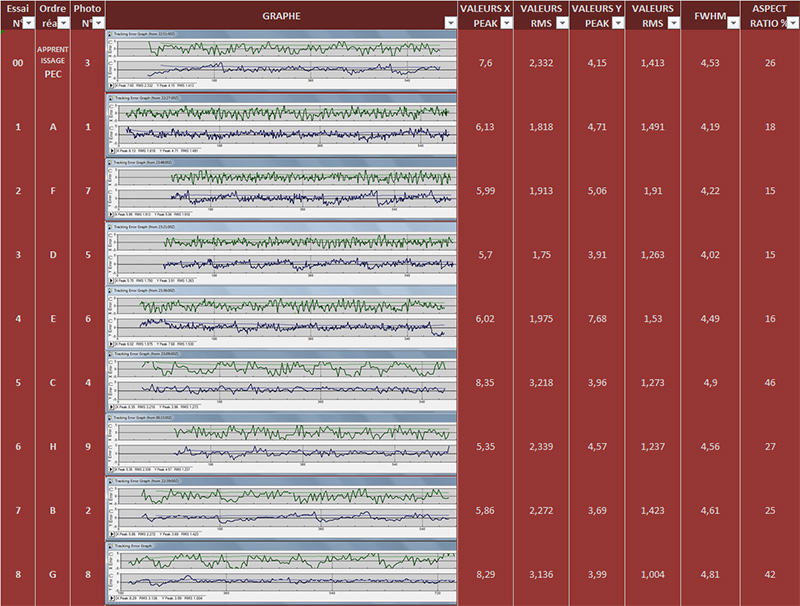
Je réalisais donc mon PE dans la nuit du 25 au 26 Juillet 2014 à Orphin. Je prenais 9 photos (8 +1 pour l'apprentissage du PEC), faisais des copies d'écran des courbes, enregistrais les fichiers log de guidage et notais à chaque fois les résultats.

L'analyse consiste tout d'abord à traiter chacune des 9 images puis à mesurer les deux valeurs ASPECT RATIO et FWHM à l'aide de CCD Inspector.
Il nous faut maintenant trouver les coefficients des équations FWHM = f(x). Je ne commenterai ici que le FWHM mais la procédure est la même pour toutes les autres réponses.
Cela se réalise soit avec des logiciels spécifiques, soit avec excel à l'aide de feuilles pré-formatées que l'on peut trouver -difficilement- sur internet, ou avec l'utilitaire d'analyse d'excel, méthode que nous allons utiliser.
On repart de la table de Taguchi, et on inscrit en face de chaque essai la réponse trouvée.
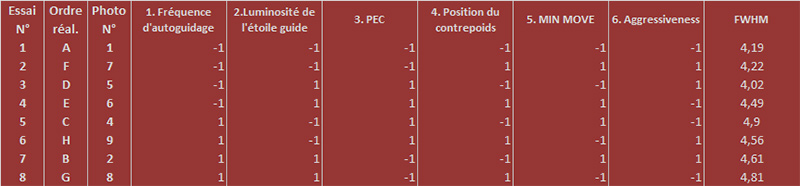
Puis dans Excel, DONNES / UTILITAIRES D'ANALYSE / REGRESSION LINEAIRE.
Plage pour la variable Y : on choisit bien sur la colonne FWHM
Plage pour les variables X : on choisit les 8 lignes et 6 colonnes contenant les valeurs -1 ou 1 du tableau
On clique sur Plage de sortie et on choisit une cellule sous le tableau pour y inscrire les résultats. C'est aussi simple que cela.
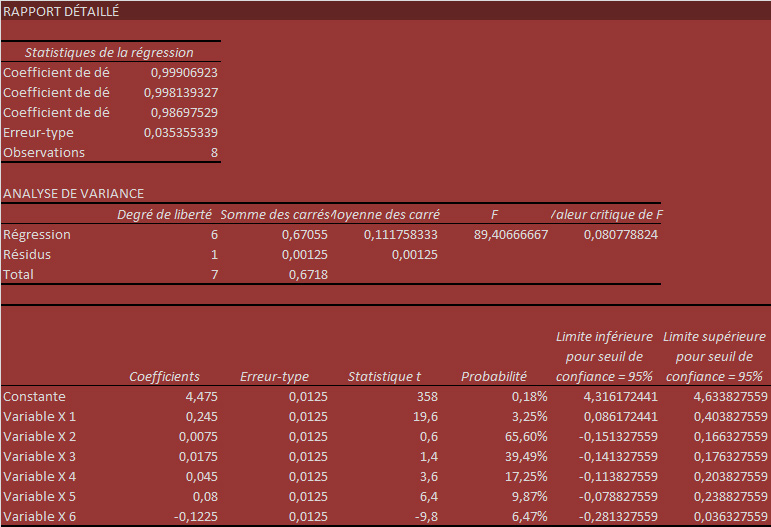
Nous allons nous intéresser tout d'abord à la colonne Coefficients. Celle-ci nous permet de trouver notre équation.
FWHM (pixel) = 4.475 + 0.245*Fréquence d'autoguidage + 0.0075*Luminosité étoile guide + 0,0175*PEC + 0,045*Position du contrepoids + 0.08*MIN MOVE - 0.1225*Aggressiveness
avec
Fréquence d'autoguidage : 1 seconde = -1
Fréquence d'autoguidage : 3 secondes = +1
Luminosité étoile guide : faible = -1
Luminosité étoile guide : forte = +1
PEC : sans = -1
PEC : avec = +1
Position contrepoids : équilibré = -1
Position contrepoids : vers l'Est = +1
MIN MOVE : 0,06 = -1
MIN MOVE : 0,10 = +1
Aggressiveness : 5 = -1
Aggressiveness : 9 = +1
Examinons maintenant la colonne Probabilité. Si nous prenons la variable X1 la fréquence d'autoguidage, un changement d'état de cette variable de -1 à +1 (de 1 seconde à 3 secondes) aura un effet sur la réponse (la valeur du FWHM) prés de 97 fois sur 100. Cet effet est significatif. Par contre si nous examinons la luminosité de l'étoile guide, non seulement son influence est faible (0.0075) mais en plus elle n'aura un effet sur la réponse que 35 fois sur 100.
Nous pouvons donc simplifier notre équation :
FWHM (pixel) = 4.475 + 0.245*Fréquence d'autoguidage - 0.1225*Aggressiveness
Je peux calculer maintenant la valeur du FWHM pour une seconde de temps de pose de l'étoile guide et une aggressivité à 9 :
FWHM = 4.475 + 0.245x(-1) - 0.1225x(+1) = 4.1
et de la même façon,
ASPECT RATIO (%) = 25,5 + 9,5*Fréquence d'autoguidage -5*Aggressiveness
Nous pouvons représenter de façon très simple sur un graphe l'influence de chaque facteur à partir d'un calcul élémentaire. L'effet du facteur "fréquence d'autoguidage" sur notre réponse FWHM peut être représenté comme suit :
Somme des Ys avec fréquence niveau -1 (1 sec) divisée par 4 puisque 4 "-" ont été utilisés. (4,19 + 4,22 + 4,02 + 4,49)/4 = 4,23
Somme des Ys avec fréquence niveau +1 (3 sec) divisée par 4 puisque 4 "+" ont été utilisés. (4,90 + 4,56 + 4,61 + 4,81)/4 = 4,72
Appliqué à chacun des facteurs, cela donne la représentation suivante pour le FWHM,

et pour la réponse "Aspect Ratio"
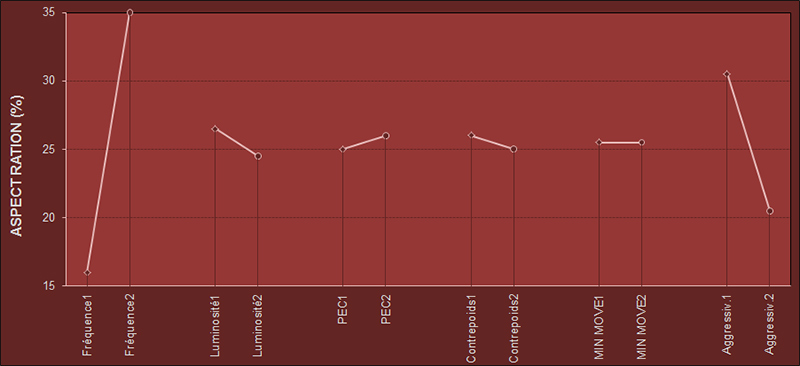
Première conclusion, je n'ai identifié que deux paramètres influents : la fréquence d'autoguidage = le temps de pose de l'étoile guide qui doit être le plus faible possible de façon à corriger le plus souvent possible et l'agressivité qui doit être à 9.
Deuxième conclusion : en mai 2013 j'écrivais << On veut que l'autoguidage se mette en action lorsque la dérive atteint 75% de l'échantillonnage de l'imageur soit 2,67x0,75 = 2,00 '' >>.
Non, ce n'est pas cela : ce que l'on veut c'est que la dérive ne dépasse jamais la valeur d'échantillonnage de l'imageur à savoir 2.67 " ou +/- 1.33 ".
Dans mon cas, j'utilisais une fréquence de guidage de 3 à 4 secondes "pour
moyenner la turbulence de l'étoile guide" comme je l'avais lu à de nombreuses
reprises sur le net. Si je reprends l'équation issue du plan d'expérience avec
une fréquence de 3 secondes :
Aspect Ratio (%) = 25,5 + 9,5x(+1) ça fait déjà 35%...
Que se passait-il ? C'est une hypothèse : il pouvait s'écouler 3 secondes (le temps d'une pose de l'autoguideur) entre le moment où l'autoguidage atteignait le seuil de déclenchement (75%) et où la correction s'effectuait. Au cours de ces 3 longues secondes la dérive excédait fortement les +/- 1.33 ".
NOUVEAUX PARAMETRES, valeurs à utiliser à compter de juillet 2014
|
PARAMETRES |
VALEUR |
Vitesse mini RATE 1 sur le FS2 |
0,5x |
|
MIN MOVE |
0,1 sec |
|
MAX MOVE |
0,7 sec |
|
AGGRESSIVENESS |
9 |
|
Temps de pose Autoguideur |
1 seconde maxi |
|
PEC |
OFF |
|
Position du contrepoids |
Peu importe |