

Psynergie
-
Compteur de contenus
52 -
Inscription
-
Dernière visite
-
Last Connexion
Soon available - 87384
Messages posté(e)s par Psynergie
-
-
Il y a 23 heures, Phil49 a dit :Tentons l'expérience au gré de nos observations puis nous ajusterons pour respecter les attentes de tous !?
Oui, c'est bien pour moi. L'idée n'est pas de parler que de guidage... Mais de faire un petit update de temps en temps...
-
Il y a 14 heures, LucaR a dit :Est ce qu'un boîtier de ce type vous ferait sauter le pas ou le RPI répond totalement à vos attentes ?
Perso, je trouve que l'électronique reste peu coûteuse pour le contrôle de l'imagerie. Donc, toute amélioration va dans le bon sens. Si le nouveau SM sort prochainement, je ferai certainement le saut... Après que les premiers bugs soient nettoyés. Pour ma part, j'ai mis une carte SSD de 128GB sur le RPI. Donc, côté mémoire, c'est bon. Le wifi tombe régulièrement, mais je suis en général à quelques mètres. Reste les nombreuses alim 12v, 5v, etc. et autres hub USB 2.0 et 3.0 que je ballade dans un sac étanche (je dispose en nomade d'une improbable prise 220v dans un chalet de pâturages). C'est sûr qu'une version plus intégrée permettrait de délester de quelques grammes ou kilos. Dans le fond, si on gagne en stabilité, pourquoi pas. Mais en l'état, ça marche pas mal. Maintenant, pour du sédentaire, le RPI est vraiment limité. La baie vitrée de la terrasse empêche la détection du wifi... Avec le RPI, je ne peux pas faire ça simplement.
-
Il y a 19 heures, LucaR a dit :Je plusseoie, mais mieux vaut créer un fil dédié alors. Car ce n'est pas propre au RPI et à Ekos, juste à PHD2
Merci de ta proposition. Cependant, je ne suis pas sûr... Il existe 33 fils sur PHD2... Mais c'est bien le PHD2 qui tourne sur SM/RPI en parallèle avec EKOS qui m'intéresse. Car même si PHD2 tourne indépendamment de KStar et EKOS, le lancement du guidage se fait depuis EKOS. Donc, c'est toute la chaine SM/RPI - KStar - EKOS - INDI - PHD2 qui est interpellée ici. Eventuellement, on pourrait se créer un sous-fil "SM - Module Guiding"... Si le guidage devient trop envahissant sur le fil de SM, on pourra faire ça. Qu'en pensez-vous?
-
Il y a 19 heures, LucaR a dit :Nan mais les chiffres tu sais... Le seul vrai critère en fait c'est les déchets que tu as sur tes sessions à cause du suivi ou du guidage. Si tu n'en n'as pas ou très peu ton guidage est au poil. Si tu en as plein t'es pas bon :-)
Oui, c'est ça... J'en suis là. Et tu as clairement raison: le résultat détermine ce qui est acceptable... Mais c'est exactement ce qui arrive avec mon pélizebre... J'ai commencé à 1200 sec. mais je vais probablement continuer à 600 sec. Ca reste intéressant de toucher la limite pour voir ce que ça peut faire...
-
Il y a 20 heures, Phil49 a dit :Ecoute, y a un truc que j'avais lu sur un forum où quelqu'un m'avait demandé ce qui avait été paramétré sur ma raquette de mon AZ-EQ6 lorsque je l'utilisais encore, et je me demande si même lorsque celle-ci n'est pas raccordée, si la donnée est stockée dans celle-ci ou dans la monture !
Ok. Je vais enlever le plastique qui emballe la chose... A tester. Au point où j'en suis, je peux essayer. Merci de la proposition.
J'arrive pas à retrouver ton texte, mais je seconde ta proposition d'échanger de temps à autre sur l'état d'avancement de nos guidages. Ca reste un peu le nerf de la guerre et vu que je suis un peu ours, je ne communique guère avec d'autres astrophotographes. Donc, je me fis à ce que je lis sur les sites. Et tu vois, le 1200 sec, sur Astrobin, y'en a plein qui font ça... Donc, je me disais que c'est sûrement accessible... Mais je n'ai jamais lu clairement les limites de l'AZEQ6... Ma seule limite, c'est si les vaches me laissent passer et que le ciel reste clair. ;-)
-
Il y a 20 heures, Phil49 a dit :Ouch, tu mets la barre super haut !!
Ok... Mes lectures me disaient qu'en narrowband, un 1800 sec. serait bien... Je me suis essayé à 1200 sec. Mais comme tu dis, ça atteint les limites de la bête. En LRGB, je suis à 300 ou 600 sec. sans problème.
-
Il y a 20 heures, Phil49 a dit :Au fait je ne me souviens plus si tu as mentionné ton matos, hormis ta monture et ta camera de guidage, tu as quoi dans ton setup ?
Oui, c'est vrai. Au début, j'avais une caméra QHY294M , une roue à filtre et un Zoom 300mm de Nikkor (je suis passé d'un DSLR à QHY). Là, ça sautait de plus de 15". Avec PHD2, il s'est calmé à mettons 3-4". Puis j'ai acheté un TS 130mm avec un réducteur de focale de 0.79. Il pèse 13 Kg... Donc, là, la monture est bien lestée. Ca gigote moins... Mais avec le guidage interne, je ne tombe pas en dessous de 4-5"... Avec PHD2, je suis dans 1-1.5".
-
Il y a 20 heures, Phil49 a dit :L'autre point qui est plus difficile pour moi, ce sont les fameuses durées d’impulsion, là, comme dit avant, j'ai entendu plein d'explications, mais je suis toujours incapable de me représenter comment ça agit et ça me fait ch... car ce n'est pas fondamental, mais cela fait partie des éléments à comprendre pour bien maîtriser le tout !
Pour le moment je n'y touche pas sur l'ASIair, et sur le Stellarmate, j'ai laissé les valeurs à 2500 si ce sont les mêmes paramètres que pour l'ASIair.
Hello,
Au début, mon guidage giclait de 15" dans tous les sens avec le guidage interne... Le seul moyen pour qu'il arrête a été de réduire la durée des impulsions à 500-600ms... Ainsi, le moteur ne se met en route qu'au maximum pour 500-600ms par cycle, quelle que soit la correction requise... Ainsi, il réduisait artificiellement l'agressivité des corrections. Mais j'ai eu ce problème avec un zoom Nikkor qui était probablement trop léger pour l'AZEQ6. Depuis lors, dans PHD2 et avec ma lunette de 130mm, il se débrouille tout seul et il corrige entre 1 et 2500 ms en fonction de son réel besoin. En tout cas, c'est ce que j'ai compris et expérimenté.
-
Il y a 4 heures, Phil49 a dit :De quel système parles tu quand tu dis "il est apparu avec l'heure d'été" ?
RPI, Kstar/Ekos ?
Je parle de l'erreur de positionnement du GOTO. En hiver, il tombe juste à chaque fois. Dès que l'heure d'été est arrivée, le problème est apparu. J'ai plein de log files. Après le GOTO, la monture se voit au bon endroit. C'est moi qui lui dit "Ca, c'est pas un Pelican" et qui demande le Solver... Et au terme du solver, le log de la monture affiche les mêmes coordonnées qu'au début (à peu près), mais il est dans la cible. Donc, la monture semble de déplacer sur la cible mais au final tombe à côté. D'environ 3000 à 6000", soit 1 à 3 degrés. Une heure RA, ça devrait me déplacer de 15 degrés environ... Bref! Je ne sais pas. Je collecte des log files et des screenshot à chaque sortie et j'attends d'avoir une bonne idée pour analyser tout ça.
Il y a 4 heures, Phil49 a dit :Ça tombe bien parce que l'on est tous les deux sur la même monture ! ;-)
Oui, en effet. J'ai de la difficulté à benchmarker mes résultats... Suis-je trop exigeant? Au contraire, mon guidage est-il en dessous de tout? Quand je vois certains chiffres annoncés, j'hésite à me mettre à la broderie... Pour ce qui concerne le GOTO, je suis pratiquement sûr qu'il y a un maillon de la chaîne qui confond UTC+2 (je suis en Albanie) avec UTC+1 en été (je suis en Suisse en été). Sinon, comment expliquer que ça marche à l'heure d'hiver? Ce qui est sûr, c'est que plusieurs composants n'ont pas de sélection Ete/Hiver (dont le driver INID de la monture EQMod et le driver INDI du GPS). Pourtant, KStar s'aligne sur le GPS qui lui, se voit clairement en Suisse et en plein été.
-
Rebonjour,
Pour les paramètres de guidage sur PHD2, c'est tout une aventure. Perso, j'ai commencé avec les valeurs par défaut. Ca marchait plutôt bien et surtout beaucoup mieux que le guidage interne du SM. Mais je suis passé à l' algorithme "LowPass2" car j'avais lu quelque part que ça pourrait être utile sur l'AZEQ6. En général, quand je suis sur une altitude de 30 à 75 degrés, ça marche extra.
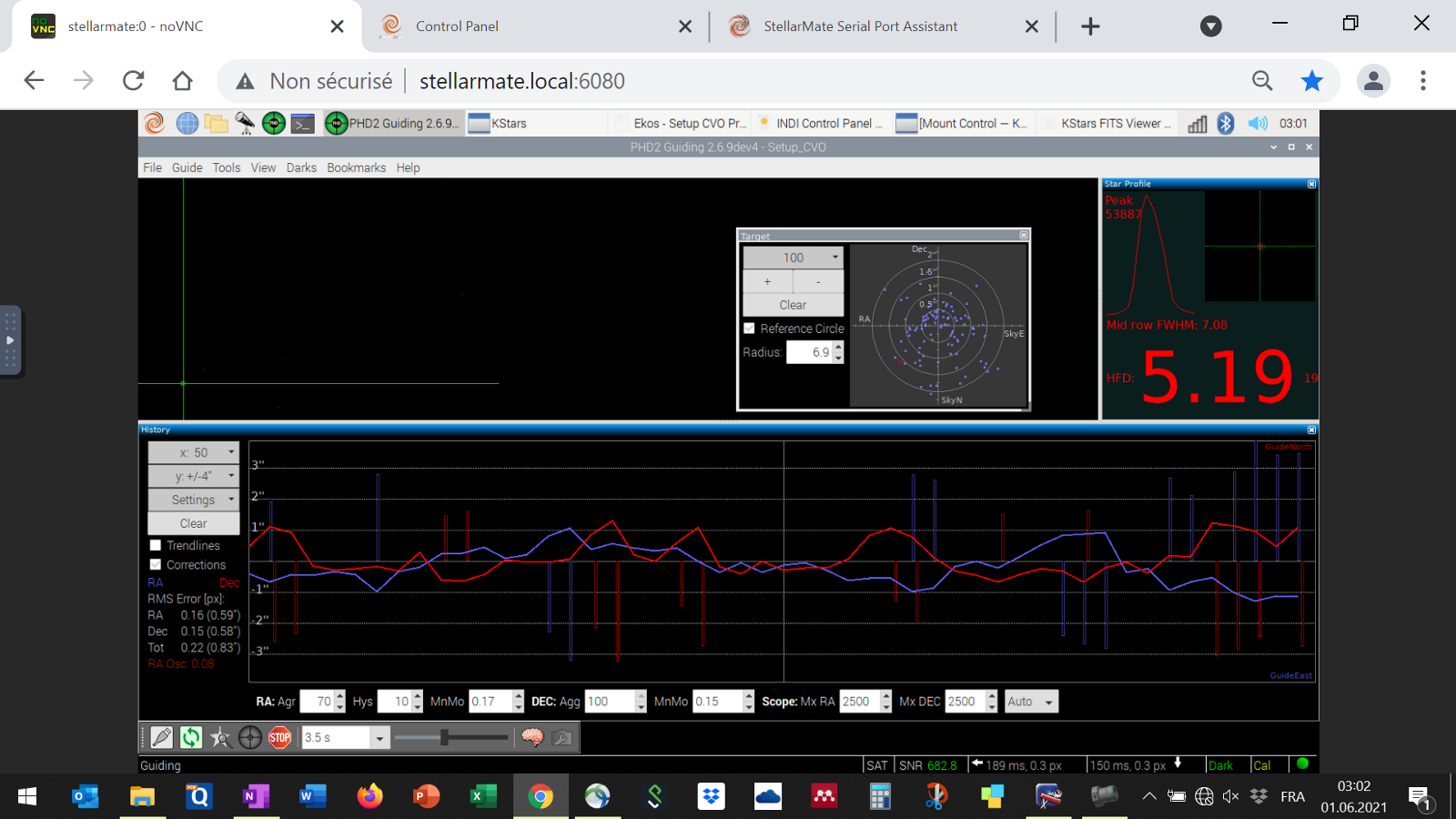
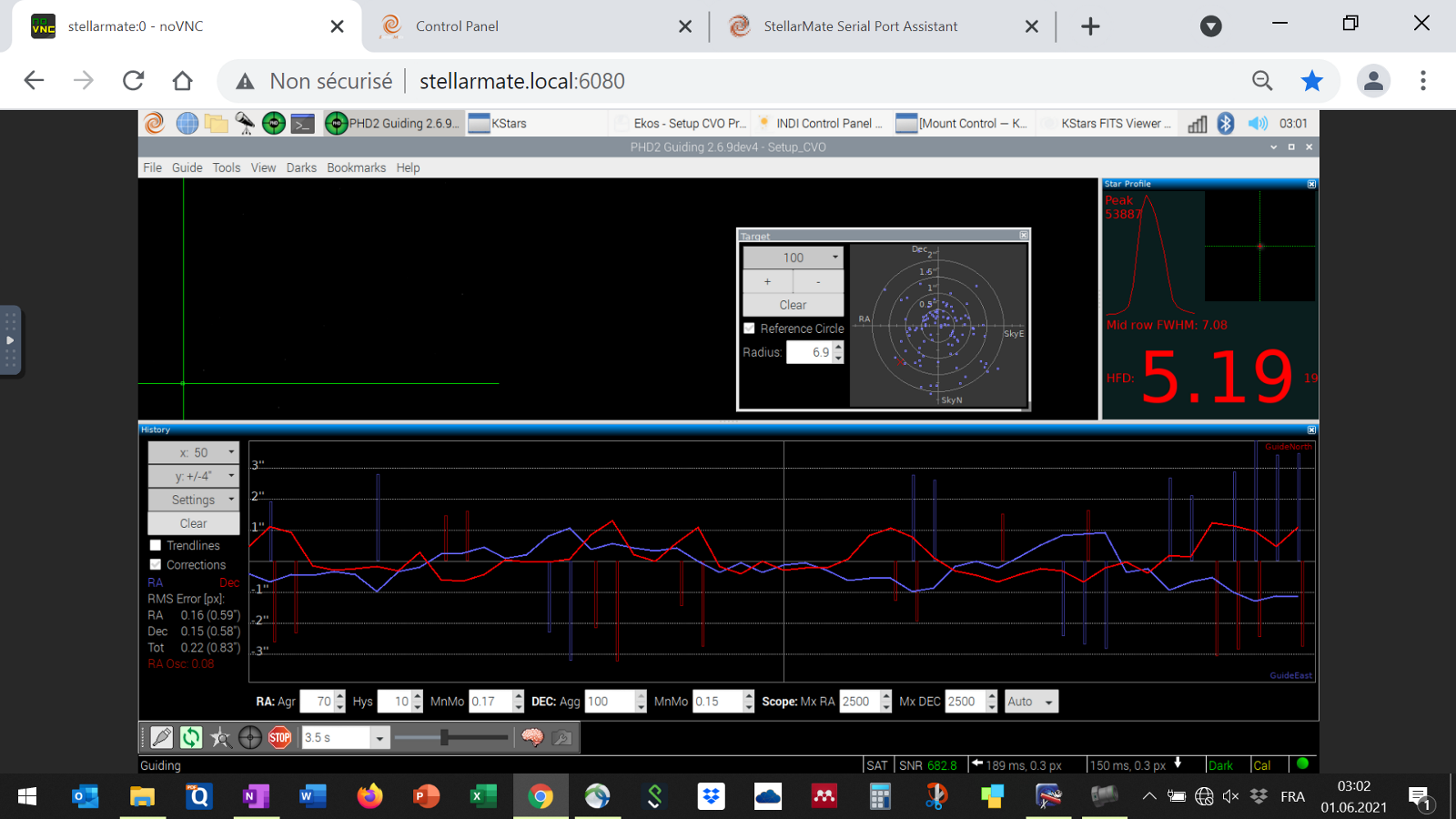
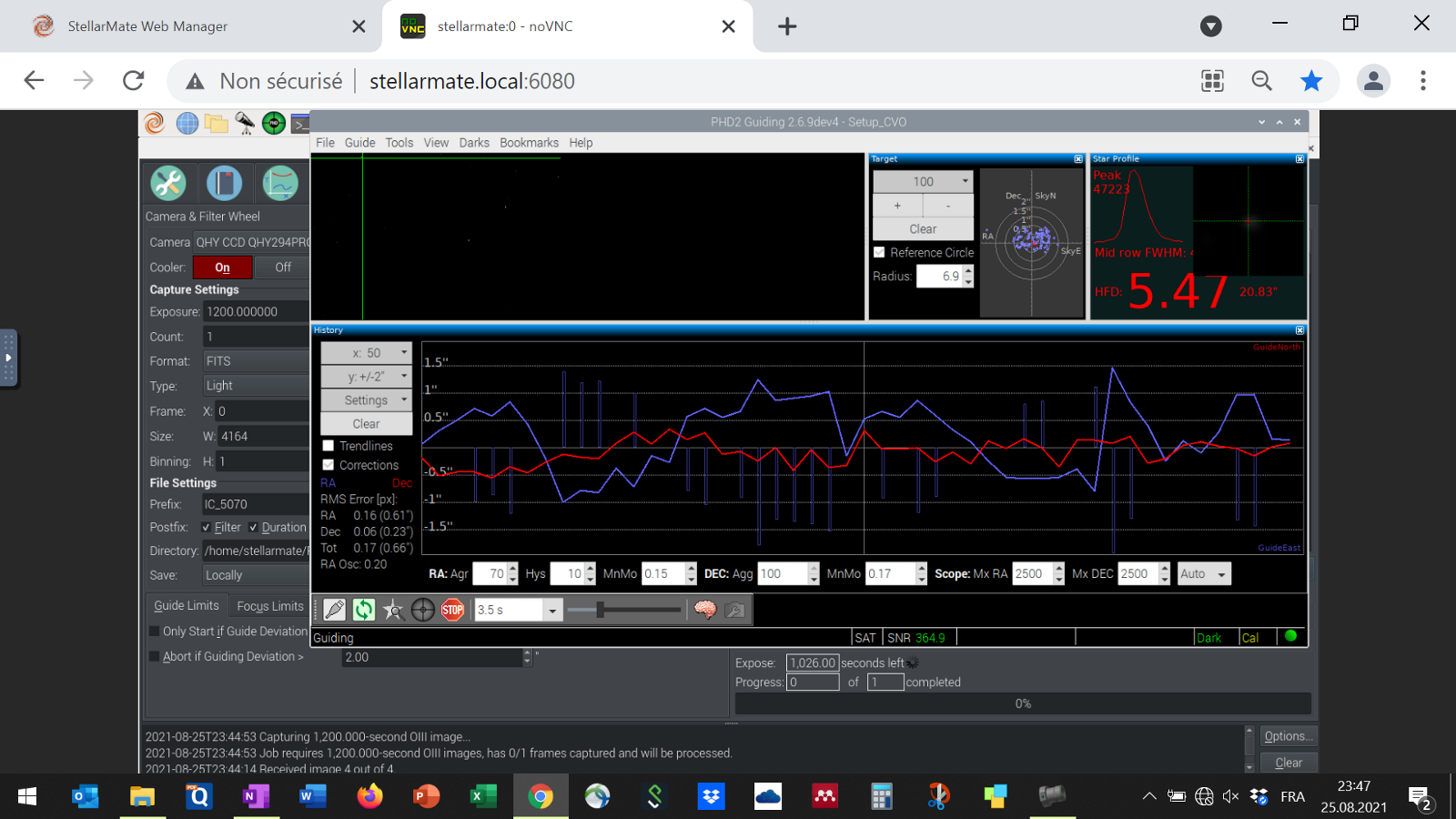
Mais là, depuis que je me suis attaqué à la Nébuleuse du Pélican (IC 5070) en essayant des temps pause de 1200 sec., j'ai parfois un Pélizebre plutôt qu'un Pélican: il a des trails sur le dos! En fait, mon guidage peu avant le retournement et juste après sont pas terribles. Et la lunette est quasi-verticale. J'ai débalancé le tout, ça va un peu mieux. Mais c'est plus compliqué à maintenir. J'ai essayé les conseils d'optimisation... ça finit à chaque fois dans quelque chose de moins satisfaisant. Donc, je ne change plus. Et en fait, le moindre nuage qui passe influence beaucoup plus mon guidage que les paramètres de PHD2.
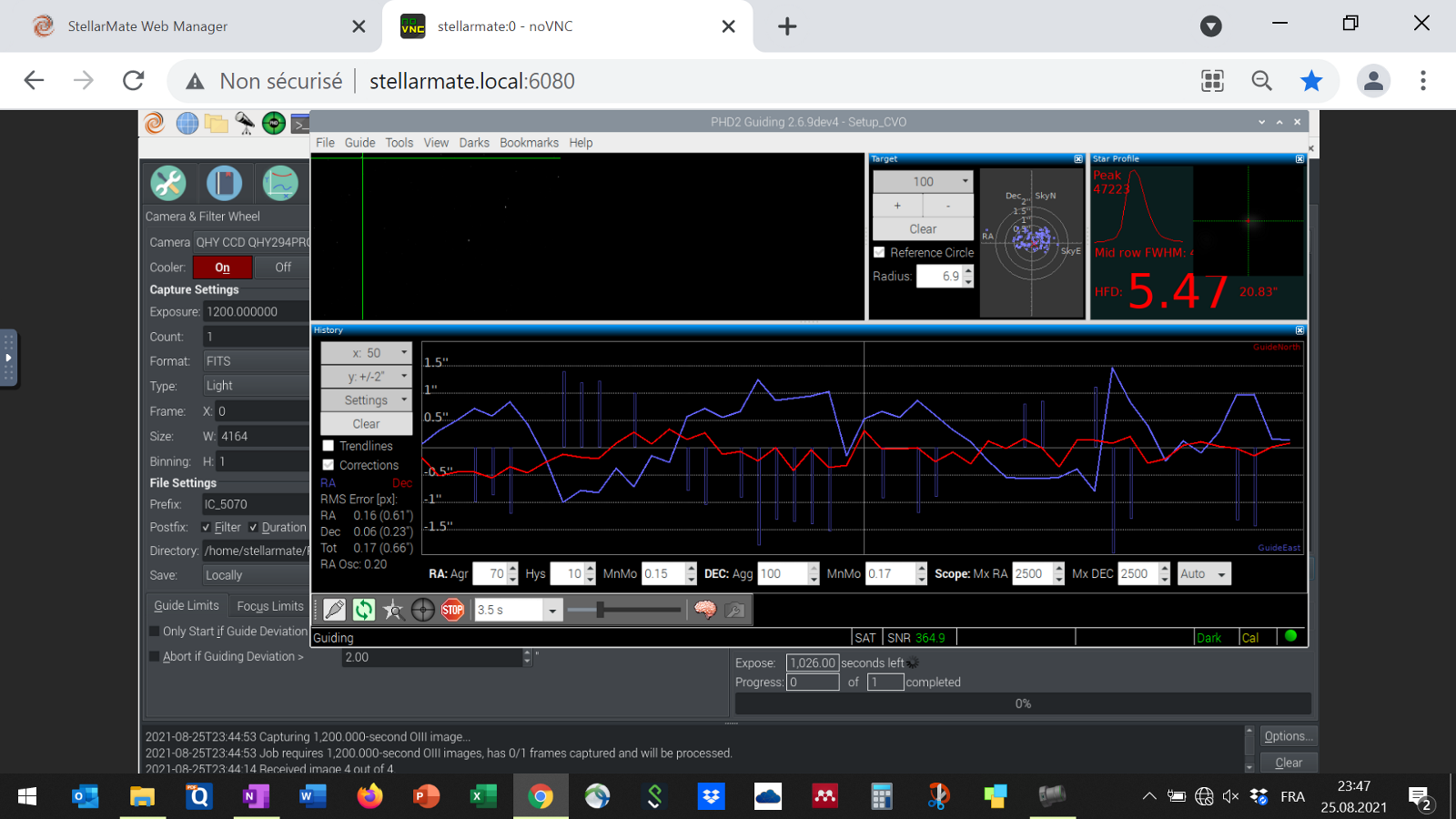
Pour moi, l'augmentation du temps de pause (je guide avec une QHY5III178C) à 3.5 sec. est un must. J'ai essayé plus court et plus long, et ça marche toujours moins bien. Évidemment, je fais une calibration au début et après le retournement... Et parfois quand le SM se fait HaraKiri... A ce stade, 1200 sec. c'est un peu ma limite. Je perds des images régulièrement à cause des étoiles oblongs... A 20 minutes par images, j'ai un peu le sentiment de perdre du temps. Donc, à moins que je trouve un moyen d'améliorer mon guidage, ça va rester sous la barre des 20'. Je dois avouer que ta question m'intéresse car j'ai un peu l'impression de jouer à l'apprenti sorcier... Je change des trucs, mais pas sûr que je sache anticiper les effets. Voilà pour moi.
-
Désolé pour toi. Lâche pas... Ca va finir par aller.
-
il y a 17 minutes, LucaR a dit :Une bonne raison c'est de le mettre à la date et l'heure du moment :-) Ou bien tu as une autre méthodes? S'il n'est pas bien à l'heure et à la date il foire ses retournement méridiens par exemple, et sans doute les goto.
Oui, tu as raison. Mais vu que je suis en nomade uniquement, j'utilise un GPS et une RTC sur le RPI. Ainsi, tout le monde est à l'heure. Et je choisis dans Kstar de paramétrer tous les instruments à partir du GPS. Ce bout là fonctionne... Il me semble... L'affaire du champ de vision était problématique lorsque j'ai essayé de mettre la PolarMaster, le guidage et l'imagerie dans un profil. EKOS ne peut gérer que deux caméras dans un même profil. Précisément à cause du choix primaire et secondaire qui fixe la taille des deux champs de vision... Il n'y a pas de troisième onglet...
-
il y a 22 minutes, LucaR a dit :PHD2 je le fais tourner sur le RPI en parallèle de KStars et Ekos et ça marche très bien.
Sinon il parait que le guideur interne de Ekos est très bien, mais je ne l'ai pas encore essayé.
J'ai commencé à l'époque avec le guidage interne.. Pas réussi à descendre sous 5" de mouvement. Avec PhD, je reste dans 1.5-2". Je ne sais pas pourquoi, mais pour moi, c'est meilleur.
-
Le 26/08/2021 à 03:41, Phil49 a dit :Mais quand je demande un Capture & solve après avoir cliqué sur "Tourner vers la cible" votre "Slew to target", bah rebelote, il me pointe sur le bout de M31 (voir screenshot ci-dessous) ! :-(
Hello Phil49,
J'ai le même problème de Goto qui n'arrive pas sur la cible (je pilote tout sur SM (y.c. PHD2) via VNC sur un PC). Il est apparu avec l'heure d'été. J'ai joué dans tous les paramètres UTC+2 de KStar, du SM, d'EKOS, des drivers INDI... Pas de solution à ce jour. Je prends à chaque sortie une copie d'écran du Goto (Sur AZEQ6) puis après le solver. En gros entre 3000 et 12000 secondes décallage... J'ai envoyé plein de docs à Jasem, mais il dit que le problème n'existe pas. Bon! J'ai renoncé à régler. Maintenant, je fait un solver avant chaque séquence... Parfois, je re-park puis je relance. Ca finit pas aller au bon endroit... Pour moi, j'ai du plaisir depuis que j'ai renoncé à ce que tout fonctionne bien. Je connais mes bugs (genre, je ne branche ma caméra de guidage qu'après avoir lancé EKOS... Sinon, EKOS et PHD2 sont en conflit pour accéder à la caméra) et je vis avec. Et surtout, je ne mets plus le SM sur internet tant qu'il n'y a pas une bonne raison. Car à chaque mise à jour, il faut tout redécouvrir...
Bon ciel
Christian
-
Rebonjour,
Afin de boucler la boucle, voici une synthèse finale de mes essais avec les machines virtuelles (VM) Azure.
Premièrement, je ne suis pas parvenu à configurer seul ma machine. Si l'on ne paie pas 30 euros par mois pour l'abonnement avec soutien technique 24/7, c'est compliqué. Or, je veux limiter mes frais fixes afin de ne payer que quand j'utilise la VM. Mais Microsoft nous propose d'utiliser UpWork pour engager des techniciens pigistes. J'ai donc fait ça et ça a très bien fonctionné.
Deuxièmement, ma configuration actuelle est une VM de 64 cœurs avec 512GB de RAM et 100GB de disque SSD partagé permanent. Depuis mon PC personnel, je transfert tranquillement mes bruts vers le disque partagé avant de faire le traitement sur la VM. Ma première utilisation a été le traitement dans PixInsight (WBPP 2.1) de mes près de 1000 fichiers (Flats, Darks, Lights, etc. récoltés sur 6 sessions distinctes) pour créer l'image qui se trouve ici: https://astrob.in/uzh5nk/F/ . La machine a mis environ 30 minutes pour le traitement complet. Ensuite, j'ai tranquillement récupéré mes Masters depuis mon disque partagé.
La seconde utilisation a été une utilisation intensive de la Déconvolution dans PixInsight. Je ne comprenais pas bien à quoi servent les nombreuses options. Or, en un peu plus de 2 heures, j'ai pu faire plein d'essais en augmentant les itérations au-delà de 100, en modifiant les paramètres divers, etc. J'utilise le screenshot de Windows pour documenter mes essais.
Pour terminer, le coût de location mensuel des 100GB de SDD permanents est de CHF 0.78.- (soit environ 25 euros/mois) + CHF 7.68.- par heure de VM. Vu que je ne l'utilise que pour des jobs très demandant en mémoire et CPU (le reste se fait sur mon portable personnel), ça reste financièrement très raisonnable.
Voilà. Je vais donc renoncer à acheter une grosse machine et faire mes intégrations et autres jobs complexes directement sur la VM de Azure. Merci de votre collaboration à la réflexion.
Bon ciel à toutes et tous.
Christian
-
Il y a 17 heures, Looney2 a dit :Prévoyez surtout que l'app, une des raisons principales de mon achat de Stellarmate, n'est vraiment pas au point... J'ai toujours pas pu faire une vidéo à Jasem mais pour ma part, quand je dématte l'app, sous iPhone ou sous Android (tablette), rien ne fonctionne, le guidage n'embarque jamais... Je dois passer par le VNC pour fermer tout ça et lancer le guidage depuis l'interface d'Ekos et là ça reprend la main depuis l'app mais c'est lourd...
Je n'ai pas mis à jour la dernière version par contre (celle de la semaine dernière), je vais faire ça et voir si ça change qqchose.
En fait, l'appli SM fait tout et le fait bien... Mais il y a plein de petits bugs qui rendent le tout instable. A vrai dire, j'ai cherché comment contourner chaque bug (pour rappel, mon GOTO estival ne fonctionne toujours pas... Mais avec le Plate Solver, il se replace, donc on y arrive), ma caméra de suivi dont le driver entre en conflit avec PHD2 (résolu en la déconnectant dans INDI ou en la branchat après le lancement de EKOS), etc. Au final, l'enjeu c'est de trouver comment le faire marcher puis de ne plus rien toucher. Même les mises à jour, je me retiens. Car pour l'avoir vécu, tu mets à jour et ton setup qui marchait, ne marche plus. Je me fiche de disposer de la dernière version. Si la version courante marche, je ne touche plus à rien. Là, je ne connecte à peu près jamais mon PI sur internet. Il reste en local et ne sort que pour imager. En tout cas pour moi, ça a permis d'utiliser les fonctions de SM sans passer la moitié de chaque sortie à chercher la cause du nouveau problème. Ma mise en route dure environ 1h30 au crépuscule, puis ça démarre, puis je surveille juste les déconnexions régulières de VNC du WIFI... L'avantage de tout faire tourner sur le PI, c'est que les déconnexions WIFI ne stoppent rien... Tout tourne en arrière... C'est juste la console qui se couche... Et le PI se plante finalement assez rarement. Évidemment, quand ça arrive, il faut tout reprogrammer la séquence.
La grosse différence, c'est que maintenant, je passe des heures à regarder la Voie Lactée qui est superbe en ce moment... Bon ciel
-
 2
2
-
-
Le 14/07/2021 à 09:31, kaelig a dit :J'ai abandonné SM à cause de gros soucis de connection WIFI chez moi. Le RPI se déconnecte intempestivement.
Mais
Super Nouvelle, Stellarmate est en train de concevoir un board
 Si le prix n'est pas trop élevé, ca va être une super
Si le prix n'est pas trop élevé, ca va être une super
solution pour nous.
lien: https://www.facebook.com/stellarmate/posts/1266871613768740
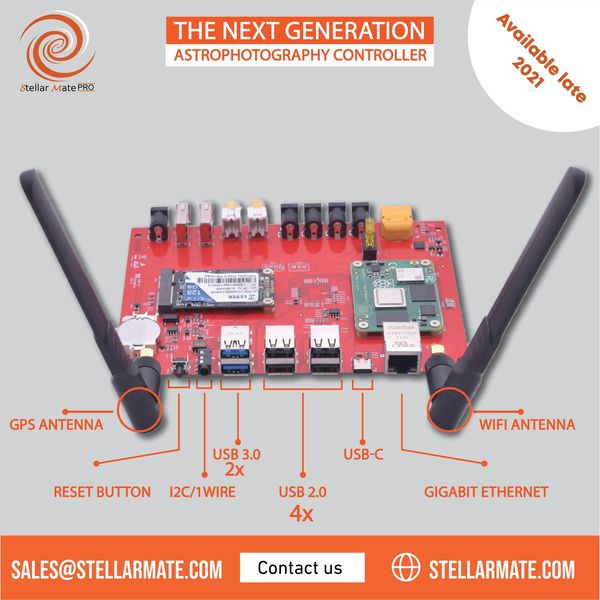
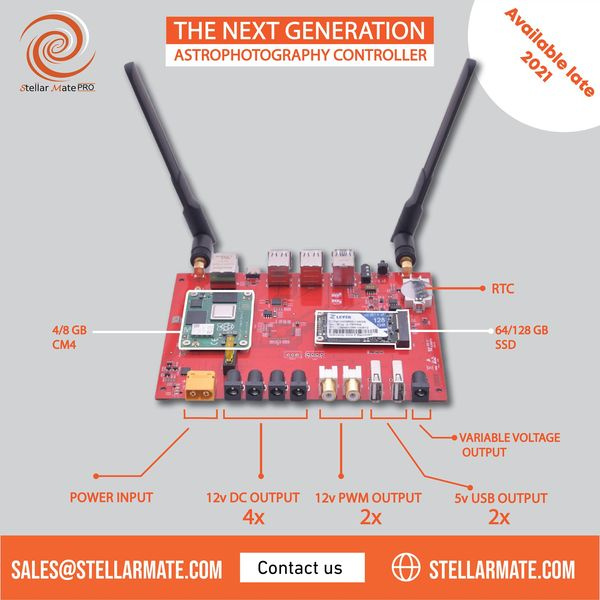
"
Nous sommes heureux de partager les progrès de notre produit de prochaine génération : #StellarMate Pro Astrophotography Controller. Il est prévu de sortir à la fin de 2021 et comporte une distribution électrique, un #Wifi & #GPS externe, une horloge en temps réel, une tension PWM et une variable, 2 x USB 3.0 et 4 x USB 2.0 ports, et plus encore !
Il sera disponible en deux variétés :
1. 4 Go de ram avec 64 Go de SSD.
2. 8 Go de ram avec 128 Go de SSD.
"
Super! On se réjouit. Car le soft SM + un matériel un poil plus robuste, on sera clairement "en business"!
-
1
-
-
Le 10/07/2021 à 20:49, stax a dit :Petite question bête.
Je n'arrive pas à avoir l'interface de Kstars en français. Et il n'existe pas de paquet kstars-l10n.
Pareil pour vous ? Si non, comment on l'obtient ?
Génial! Merci. J'arrivais pas à faire ça... Pour ta question: Dans le Help ou l'aide, "Change the language"...
Le 11/07/2021 à 19:08, stax a dit :Heu....si. En hiver on est en UTC+1 (https://time.is/fr/Switzerland). Ou alors il y a un truc que je n'ai vraiment pas pigé.
Oui, mais y'a rien pour l'indiquer... Comment le système distingue UTC+2 (UTC+1 + été) de UTC+2 (Pologne)? J'ai refait des copies d'écran de ma sortie... Je joins le fichier... J'ai les logs... Je dois les trier, mais j'ai déjà fait ça plusieurs fois...
-
Hello Stax,
Merci de ta réponse. Content d'avoir un compatriote sur Astrosurf. Et tu as raison: on va finir par avoir les pattes palmées... Je vais monter ce soir... Ca semble être bon jusqu'à 2h...
J'ai une première question un peu nono: je ne sais pas citer ton message pour répondre. Comment on fait ça sur Astrosurf?
Par ailleurs, tout est exactement comme tu le montres. Les infos sont correctes dans INDI, EKOS, dans SM et dans KStar. Mais mon GOTO M101 tombe à 4000 arcsec de la cible... Tu noteras que l'UTC+2 n'indique pas l'heure d'été. Il y a quelque part une case à cocher qui indique que c'est l'heure d'été qui n'est pas cochée... Vu que je n'ai pas le problème en hiver.
Merci d'avance
Cordialement
CVO
-
Bonjour,
J'ai relu les posts de ces dernières semaines... J'ai une question et quelques commentaires qui peuvent éventuellement être utiles:
Je suis en nomade. Je m'installe à 1100m d'altitude dans la montagne. J'ai juste une prise électrique. Je me connecte sur le hotspot du SM via un vieux PC notebook en VNC. J'image avec une QHY294M + QHYCFW3 (reliée directement à la caméra), je guide avec une QHY5III178C et ma monture est une AZEQ6 connecté via EQMod.
Premièrement, j'ai essayé à l'époque de jouer avec le PI4 et Stellarmate en installant des trucs et des machins… Amusant, ce petit machin en Unix… Finalement, plus rien ne marchait correctement. Jasem s'est connecté 2h sur ma machine sans pouvoir y faire quelque chose. Finalement, j'ai reflashé une version récente et fait les mise à jour uniquement via le logiciel d'update natif du SM. Depuis lors, je ne touche plus à rien et ça fonctionne bien depuis 6 mois. Je ne fais que les mises à jour via le logiciel qui est sur le bureau du SM. Donc, attention aux bricolages… SM est horloge de haute précision.
Deuxièmement, j'ai passé bien du temps à vouloir faire tourner la caméra PoleMaster et le logiciel de QHY sur le SM. Les profils INDI ne sont pas faits pour avoir 3 caméras. Donc, j'image avec une QHY294M et je fais le suivi avec une QHY5III178C. Mais j'ai renoncé à utiliser la PoleMaster depuis EKOS/INDI. De plus, le logiciel PoleMaster sur PI se plante très souvent. Ce qui en passant, peut planter EKOS, KSTAR et parfois le tout. Donc, j'ai finalement opté pour PoleMaster qui tourne sur le PC que j'utilise pour commander SM et le PI via VNC. C'est tout ce qui tourne sur le PC. L'appli est stable et je n'ai plus aucun problème de mise en station. C'est une histoire de 5-10 min. Et pendant ce temps, je peux continuer à collecter des Darks sur le PI.
Troisièmement, j'ai eu des problèmes de guidage avec le guidage interne depuis toujours. En moyenne, +/- 10 arcsec de variation…. Là aussi, j'ai demandé de l'aide à Jasem, mais sans succès. Finalement, j'ai commencé à utiliser PHD2 sur le PI. Il s'agit donc d'indiquer dans le profil INDI que le guidage sera fait depuis PHD2. Au lancement d'EKOS, le module de guidage attend que PHD2 soit lancé pour offrir "connecter". Au début, ça ne marchait pas. Si je mets dans le profil INDI deux caméras QHY (image : QHY294M et guidage : QHY5III178C), PHD2 n'arrive plus à gérer la 178C. Je dois la déconnecter dans INDI (ou la brancher seulement après le démarrage de EKOS) et alors, PHD2 peut prendre son contrôle. Ensuite, je lance comme prévu le guidage via PHD2 depuis EKOS et tout marche. J'ai entre 0.5'' et 2'' de dérive et ça me satisfait pour l'instant.
Enfin, quatrièmement, j'avais des problèmes de GOTO qui n'arrivaient pas au bon endroit. J'ai finalement acheté un kit horloge pour le PI https://www.seeedstudio.com/High-Accuracy-Pi-RTC-DS3231.html 7$ chez SEED. Installé en 5 min y.c. la chargement du logiciel depuis Github. Ensuite, j'avais acheté le dongle GPS (VK-172 USB GPS Receiver Dongle) proposé sur SM… Il perdait systématiquement le signal et se plantait. Finalement, j'ai commandé celui-ci https://www.amazon.co.uk/gp/product/B07LBWF1P7/ref=ppx_od_dt_b_asin_title_s00?ie=UTF8&psc=1 et il marche parfaitement.
Maintenant, lorsque je démarre mon PI, il sait où il est et quand il est… Mais ça n'est plus vrai depuis le passage à l'heure d'été. Depuis ce passage, mes heures locales sur le PI et les informations du GPS sont correctes dans INDI (dans le driver GPS et dans le driver EQMod). Mais mes GOTO atterrissent systématiquement à côté (environ 4000 arcsec!). J'ai paramétré KStar pour que "le GPS mettent à jour tous les périphérique"… ça ne marche pas mieux. Si Je choisis dans Kstar "Kstar mets à jour les périphériques", les données géographiques GPS ne sont pas chargées depuis le GPS.
En résumé, les coordonnées affichées dans EKOS et Kstars sont correctes… Donc, il est sûr d'être au bon endroit. C'est donc l'observateur qui n'est pas à l'endroit prévu. A ce jour, ma principale hypothèse est qu'il n' y a aucune possibilité sur EKOS de dire que c'est "UTC+2" parce que nous sommes en été, mais qu'en fait, j'habite en Suisse à UTC+1.
A ce jour, je m'en sors avec un alignement via Astrometry… Mais j'aimerais bien un jour trouver la solution. Jasem semble dire que le problème n'existe pas. Voilà. Si quelqu'un a une idée, je suis preneur. Bon ciel.
-
Bonjour à tous,
Je ne sais pas comment répondre à un message spécifique sur Astrosurf... (il n'y a pas d'onglet "citer" dans Astrosurf?).
J'ai fait plusieurs essais le week-end passé dont les résultats sont présentés en français puis en anglais dans le fichier ci-joint. Je ne redis donc pas ce qui y est.
Concernant la taille des fichiers: à ce jour, ma cible du printemps, M101, est constituée de plus de 800 fichiers de 22MB chacun (bias, dark, flat, light, soit environ 15GB de données).
Concernant les logiciels:
Pour l'instrumentation, j'ai commencé voici une année avec StellarMate (SM). Je me suis énervé contre ce système, ai contacté Jasem, obtenu parfois des réponses, parfois pas, etc. A un moment donné, j'ai renoncé au PI et j'ai essayé sur Windows… C'était encore pire. Soit les fonctions manquaient, soit j'avais des bugs liés aux drivers ASCOM, etc… Même avec SGP qui m'a semblé l'alternative la plus intéressante, mais qui me semble avoir encore des problèmes de jeunesse. Au final, je suis revenu au PI et à SM. Je connais les bugs, je sais les contourner et quand mon PC se plante (ce qui arrive tout de même régulièrement), le PI continue bravement son travail.
Pour le traitement, un changement serait envisageable et ce sera peut-être la prochaine étape. Mais en l'état actuel des choses, je suis sous PI et j'aimerais le maitriser. Je trouve déjà difficile de comprendre ce que fait chaque traitement. Mais je dois admettre que j'aime ce logiciel. Je vois comment aller plus loin. Je programme en Python (après assembleur, Fortran 66-77, Basic, ADA, C++, etc. dans mes jeunes années)... Je vois qu'il est possible de programmer des scripts en Java... C'est une perspective qui m'intéresse. Mais peut-être que Syril le fait aussi... Je retiens l'option pour quand je serai "tanné" de PI (en bon québécois).
Concernant les machines:
Ma machine actuelle dispose de 1 To de SSD et 16GB de RAM. Je pourrais faire passer ma RAM à 32 ou 64 Go. Mais c'est ma machine professionnelle... Et le Service Info refuse même si je paie... Je dois donc en rester là. Par ailleurs, plusieurs d'entre vous ont relevé que faire du calcul sur un notebook, qui vise une réduction de la consommation, est une mauvaise idée… Ca semble très pertinent en effet. D'où ma question : dois-je acheter ou louer ?
Si je résume plusieurs commentaires sur les machines, je comprends qu'une machine genre AMD Ryzen Threadripper 3990X (4.3 GHz Max.) avec 32GB de RAM serait un bon plan. Néanmoins, je reste interrogatif sur les machine à 1000 euros dont vous me parlez... De mon coin de pays, une machine comme celle décrite, c'est plus près de 3000 euros que de 1000 euros (https://www.toppreise.ch/chercher?q=ryzen%209%205900x). Et il me faut encore un écran, une souris, etc...
Concernant le cloud: j'ai essayé Amazon (AWS), Google, AZURE et OVH (un collègue en a parlé ailleurs). J'ai un peu galéré sur chacun des sites. Finalement, j'ai été capable de faire tourner AZURE. J'ai fait des tests plusieurs heures le week-end dernier (environ 4-5h. Chaque heure coute environ 8 euros). Total: 49$ de frais pour du CPU (64-cores et 512GB RAM) et assez de SSD. Ca marche très bien. Seul problème: la possibilité de voir les changements en direct (p.ex. Histogram Transform ou Cosmetic Correction) ne fonctionne pas en déporté. Donc, il faut tester ses paramètres en local sur quelques fichiers.
Par ailleurs, je suis coincé sur Azure car je ne sais pas comment créer un disque virtuel que je peux accéder depuis mon notebook et depuis la machine virtuelle. C'est un simple problème technique, mais l'abonnement de base ne prévoit pas de soutien technique. Donc, j'ai suivi les conseils de AZURE et suis allé sur UpWork. J'ai déposé une demande et contre toute attente, j'ai reçu plein de réponses. Tous des ingénieurs système qui semblent comprendre les détails de la configuration sur AZURE. J'ai engagé une personne de l'Ile Maurice et il va m'aider en début de semaine. Je vais voir si ça fonctionne. Si ça fonctionne, je pourrai transférer mes 16GB de datas tranquillement depuis mon notebook, puis lancer le traitement sur la machine virtuelle.
Globalement, à la lecture de vos commentaires, mon questionnement évolue et ma pratique aussi. Là, je viens de passer 3 mois sur M101. J'ai collecté un nombre raisonnable d'images. A chaque sortie (2x/mois environ... Il pleut tout le temps), j'intègre une fois mes images pour voir de quoi ça à l'air. Il n'y a en a pas tant que ça, il faut au plus une heure de cloud (8 euros/h). Ensuite, si je reste dans cette logique, l'intégration complète va prendre plusieurs heures de calcul une seule fois par saison. Donc en 2021, je vais pousser l'essai jusqu'au bout, histoire de voir combien et comment.
Merci de vos apports. Bon ciel.
210703 - Evaluation finale - Virtual Machines WorkStations.pdf
-
Bonjour à toutes et tous,
J'ai passé plusieurs mois à renouveler mon setup. Aujourd'hui, ça fonctionne bien. Il me reste néanmoins à optimiser mes temps de calcul. J'utilise PixInsight sur mon NoteBook. Mais c'est lent… Même avec un i7, 16GB de RAM et 1TB de SSD. Acheter une workstation vraiment musclée me semble peu pertinent. C'est très coûteux et vite obsolète pour un usage de hobby. J'aimerais mieux louer du temps CPU sur des serveurs externes. Connaissez-vous des fournisseurs qui louent? Certains d'entre vous ont-ils trouvé une parade intéressante? Merci d'avance de vos commentaires.
Clear sky.
Christian
-
Bonjour à toutes et tous,
Merci de vos réactions et commentaires très intéressants. Je retiens en synthèse qu'une occase en FF n'est pas la meilleure option. Un plus petit format neuf ou très récent (je pensais effectivement à la QHY294M) serait préférable. Pour le choix couleur ou mono, c'est lié à mon désir d'accroitre le nombre de séances annuelles. Je sors habituellement en montagne. Mais ça limite surtout en hiver. Donc, je veux tenter depuis ma terrasse plein sud. Mais la PL est énorme. Donc, en mono, je pourrais prendre des filtres très sélectifs et ainsi, collecter aussi depuis la maison. Et effectivement, je risque de sauter un peu le budget.
Merci encore de vos apports à ma réflexion.
Bon ciel à tous.
Christian
-
Bonjour Romain,
Merci beaucoup de ce retour. C'est bien ce que je cherche: des avis d'amateurs qui n'ont rien à gagner ou à perdre. Concernant la vitesse de transfert. Si je reste en ciel profond et de longues poses, dans le fond, la vitesse de transfert ne joue pas de grand rôle... est-ce correct de voir ça comme ça? En arrière, j'ai un Stellarmate avec un USB-3.
Merci pour le complément
Cordialement
Christian
Stellarmate + RPi
dans Astrophotographie
Posté(e)
J'en conclu que tu enseignes également... Bonne rentrée. Moi, je commence lundi prochain...
Merci Frank. J'ai copié tes paramètres. Lorsque ça marche plus et que je ne sais plus à quel saint me vouer, j'essaie les paramètres des collègues trouvés sur les sites,
Je peux me tromper, mais lorsque j'ai voulu augmenter ma mémoire, j'avais vu que le PI4 ne pouvait pas gérer plus de 128GB. Je me suis donc limité à ça. Quid du PI3b? J'imagine que c'est lié à la taille des adresses...