

Patrick Lequevre
-
Compteur de contenus
18 -
Inscription
-
Dernière visite
-
Last Connexion
Soon available - 93802
Messages posté(e)s par Patrick Lequevre
-
-
Bonjour,
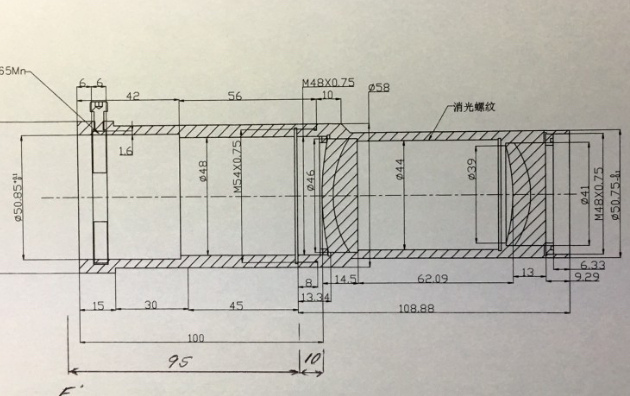
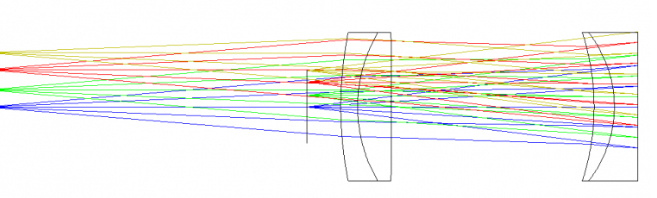
J’utilise sur mon newton le ComaCorr 1,5 de chez APM couplé avec ma bino. Il est plutôt présenté comme une Barlow télécentrique mais fonctionne très bien avec une bino, le grossissement légèrement inférieur au Baader 1,7 Newtonien est parfait pour le CP.
Tout les glasspath ne sont sont identiques mais voici le schéma optique de l’APM:

-
-
Bonjour,
c’est dans le mode « RA DEC »
-
Ok,
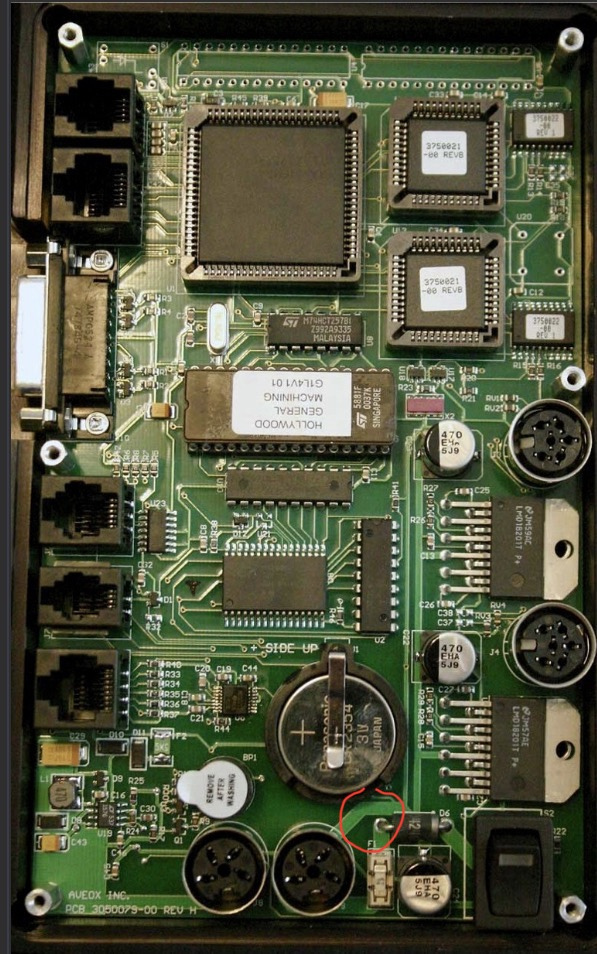
Inspecte quand même les soudures avec une loupe, tu pourrais trouver des soudures sèches.
😉
-
 1
1
-
-
Bonjour,
Sur la photo de la carte, j’ai l’impression qu’il y a une soudure « sèche » sur une diode. C’est peut-être une ombre car la photo n’est pas très nette mais ça vaut le coût de regarder. En plus c’est bien caractéristique de ce type de panne.
bon diag !
-
Bonjour,
Non cette bino n’est pas compensée, son chemin optique avec plus de 100mm en fait une bino « classique » .
-
1
-
-
-
Voici ce que j’ai trouvé sur la Celestron:
Angle a 60°
Chemin optique 118 mm
Entré prisme : 19mm
Connections T2 + adaptateur 31.75 fourni
-
1
-
-
Bien vu!
Avec la marque c’est mieux, sûrement un modèle copié sur les têtes de labo.
-
Bonjour,
c’est sûrement une tête bino démontée d’un microscope de labo et adaptée avec un coulant 31,7.
Celle-ci ressemble fortement à Olympus.
bon ciel!
http://michel.desevaux.free.fr/images_equipement/instruments_accessoires.htm
-
1
-
-
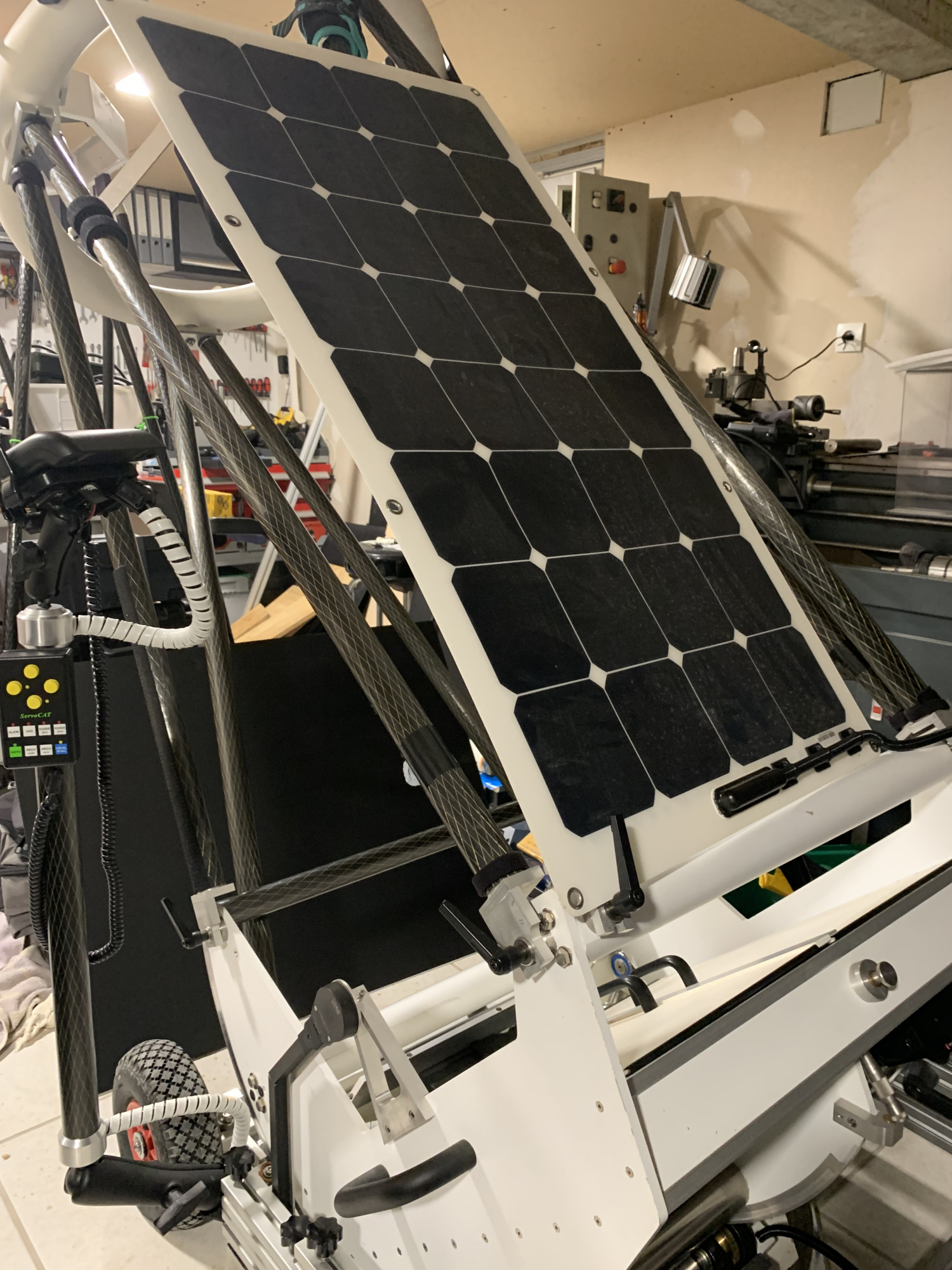
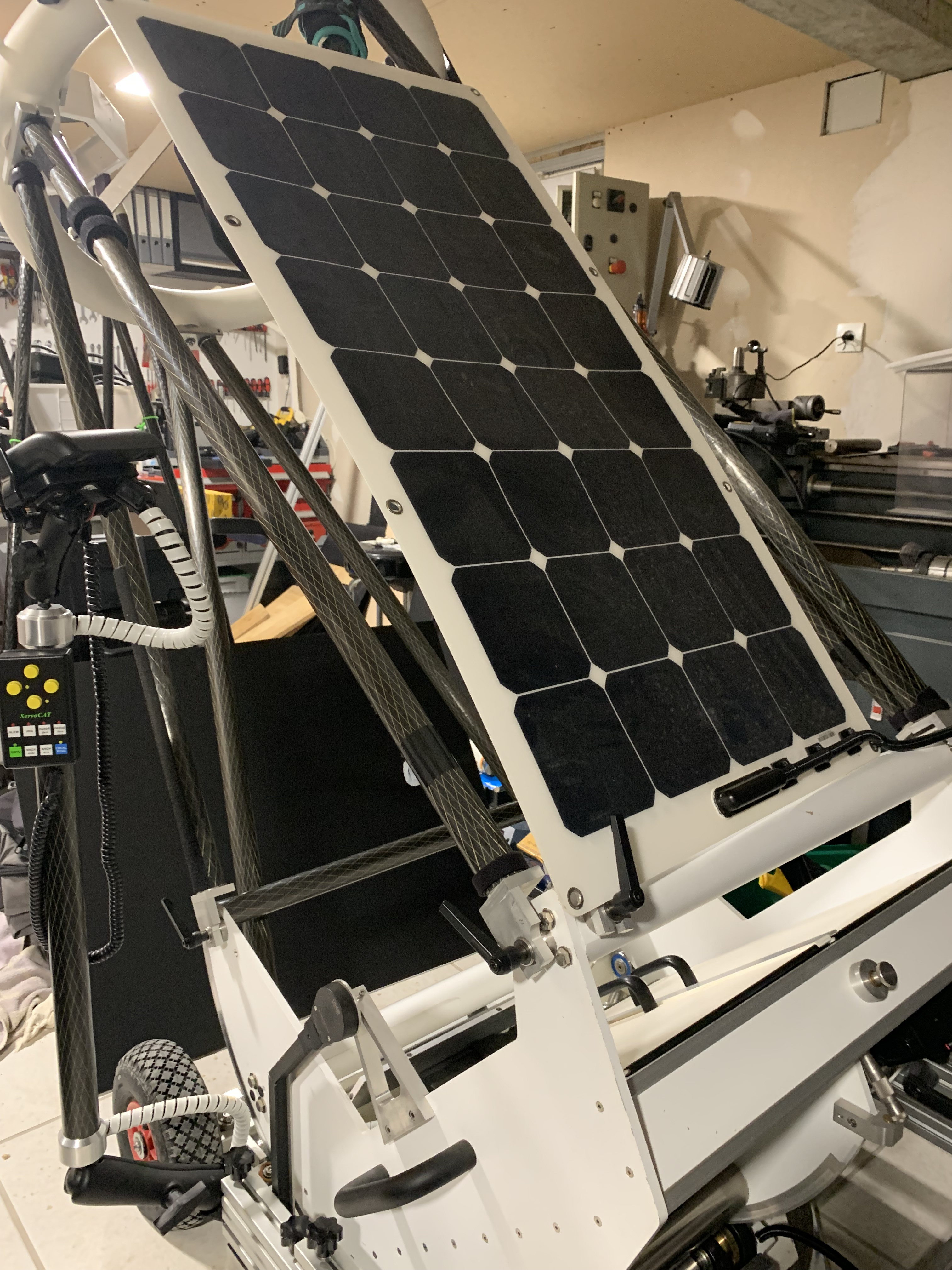
J’utilise un panneau souple de 100W de nautisme.

-
2
-
-
Bonsoir,
Sur mon 600 goto Servocat, j’ai une 20Ah LiFePO.
Je tiens 2 nuits tranquille!
Je recharge la journée avec un petit panneau solaire quand je suis en nomade.

-
2
-
-
Bonjour,
j’ai ce message aussi sur mon smartphone lorsque ma tablette est à proximité.
La tablette se connecte au wifi du Nexus et cela perturbe SkySafari sur mon smartphone (et inversement si j’utilise la tablette).J’ai pris l’habitude de couper le wifi sur le second appareil, depuis plus de soucis.
Ton problème est peut-être différent mais c’est une piste.
bon ciel!
-
 1
1
-
-
Bonjour,
Sur mon 600 altaz motorisé avec Servocat, j’ai associé le Nexus pro depuis quelques temps (avant j’avais l’argo navis). Ce qui m’a permis de connecter SkySafari en wifi avec le boîtier Nexus.
Cela fonctionne à merveille!
-
Oui sûrement un problème de signe devant le nombre de pas dans les paramètres d’où l’importance de vérifier si le Nexus fonctionne déjà en push-to.
-
1
-
-
Bonjour Thierry,
D’après ce que tu décris, j’avais le même problème sur mon Altaz de 600 avec la même configuration (Nexus DSC pro avec encodeurs 400000 pas + Servocat ) et j’ai bien galéré pour trouver la solution.
Bien sûr comme il a été dit, il faut vérifier le montage et les paramètres de l’ensemble.
Ton Nexus fonctionne t’il bien quand tu l’utilises en push-to lorsque ton servocat est éteint ?
Si oui, c’est le servocat qui perturbe le Nexus.
Le Nexus reçoit beaucoup d’informations de divers câbles, le port série, le port USB, les encodeurs, la câble d’alimentation externe si il est utilisé.
Les câbles agissent comme des antennes et des informations peuvent se perdre ou transiter d’un câble à l’autre, surtout que bien souvent les câbles sont fixés ensemble dans le même toron pour le côté pratique et esthétique.
Tu peux faire un test en atelier de jour pour voir le phénomène: calibre juste la butée 90 sans faire le reste (le deux étoiles) ensuite tu vas dans le menu « test encodeur », avec la télécommande du Servocat tu fais quelques mouvements en altitude et en azimut.
Ensuite tu reviens en butée 90 degrés, normalement tu devrais lire « 90 degrés » sur le Nexus.
Si ton Nexus est perturbé comme le mien l’était, la valeur sera environ de 88 ou 92 degrés suivant la perturbation.
Ce qui explique pourquoi les moteurs s’affolent, le passage au delà de 90 degrés n’est pas prévu par le servocat en Altaz.
Le même test sur l’encodeur d’azimut montrera la même chose mais moins pratique à réaliser.
Plusieurs semaines de galère : remplacement des câbles et des encodeurs , blindage des moteurs et des encodeurs, mise à jour du Nexus… toujours les mêmes problèmes😤
Et finalement la solution au problème : les anneaux de ferrite.
J’ai ajouté à chaque extrémité de tout les câbles un anneau de ferrite, c’est radical!
Preuve par de nouveaux tests en atelier et sur le ciel.
Plus de problèmes de pointage et de moteurs qui s’affolent!
Et en plus cela ne coûte pas chère, la boîtes de 28 pièces pour 15€.
En espérant t’avoir aidé,
Patrick.

-
1
-





Glass path
dans Astronomie pratique
Posté(e)