

MMeunier
-
Compteur de contenus
157 -
Inscription
-
Dernière visite
-
Last Connexion
Soon available - 48184
Messages posté(e)s par MMeunier
-
-
il y a 2 minutes, Sonne a dit :Pas mal pour un premier essai. C'est aussi un petit peu sous-échantillonné. Soit utiliser une barlow 1,5 environ avec cette caméra.
)
il y a 10 minutes, Loup Lunaire a dit :C'est pas mal, elle est juste un peu à l'envers à 100% elle manque de netteté mais en réduction dans l'état c'est très bien.
Effectivement j'ai hésité à mettre ma big barlow Televue, mais ça turbulait à mort, et la mise au point était très dur. Faut dire que 35° en journée, ça à chauffer fort!
Sinon merci de vos commentaires.
-
Bonjour,
Comme Janus Sud est sous les nuages, Janus Nord bataille pour fonctionner sous NIna, j'ai fait une premier essai avec mon vieux LX200 12" sur la lune. Mosaïque d'image avec ma ZWO533 et au foyer de 3000mm.
Attention ce n'est vraiment pas ma spécialité. Ciel très turbulent après une journée à 35° en région parisienne.

-
 9
9
-
 2
2
-
-
Citationsi tu veux faire des nébuleuses planetaires ou des petites galaxies tu devras passer par les grands F/D ne t'en déplaise.
Ben non, avec 0.4"/pixels aucune utilité d’avoir un F/D important, je répète, le F/D n'a rien à voir, c'est l’échantillonnage qui compte! Avec notre F/D faible, nos pixels petits, on fait ce que l'on veut, soit des grands champs soit des petits objets sans problèmes.
Citationle binning logiciel est fait pour ça. il parait qu'il fait des miracles sur les caméras CMOS.
Encore une fois non, le binning sur les CMOS n'apporte rien, c'est la même chose que de faire du binning logiciel. Tu n'as pas l'air de connaitre la différence entre le CMOS et les CCD classiques.
ASTRO DEEP SKY 1.7MP=14mmx10mm
ZWO6200=24mmx36mm, le choix est vite fait.
En bref avec un petit F/D, tu as le beurre et l'argent du beurre. Un grand champ et une super résolution. 1900mm de focale à F/D=3.5 et une ZWO6200 avec des pixels de 3.6um, c'est la config idéal, on fait ce que l'on veut, des petits objets ou du grand champ, et pour les occultations c'est tiptop. Désolé de te voir t'acharner à défendre les grands F/D, cela doit être le manque d'habitudes avec les petits F/D et le matériel moderne.
Pour finir, le ciel profond en région parisienne, quand tu n'as pas le choix ok, mais avec Janus Nord et Sud qui sont sur de bons voir excellents sites ..., je ferais un peu de planétaire et des occultations.
-
D’où l'intérêt des petit F/D!!!
-
1
-
-
Citationarrête de croire qu'il n'y qu'avec des tubes en F/D <6 qu'on peut faire du CP.
cela demande juste plus d'expériences et d'avoir un bon suivi
Pour avoir pratiqué les deux, franchement ya pas photo, surtout avec les capteurs CMOS actuels, c'est donner de la confiture aux cochons. Si on analyse:
1- champ tout petit
2-luminosité faible
3-suréchantillonage avec les capteurs actuels.
C'est vite vu pour moi. Là je cherche juste à utiliser ce tube utilement dans la région parisienne avec des occultations.
Au passage, le suivi n'a rien à voir avec le F/D du télescope, mais uniquement avec sa résolution par pixel et le seeing du site. Au chili avec nos 0.36"/pixel et un seeing qui descend parfois vers les 1.2", là c'est touchy. Pour l'expérience, je crois que je l'ai!
Après, les gouts et les couleurs... Chacun fait ce qui lui plait.
Finalement, j'ai pris ça:
https://starizona.com/products/starizona-sct-corrector-63x-reducer-coma-corrector chez Pierre Astro
-
1
-
-
Oups, je viens de commander un Lepus, mais c'est pour ACF, ça ira sur mon UHC??
-
Je veux juste faire des occultations, et un peu de planétaire, mais là pas besoin de réducteur. Pour le reste, Janus Nord et Sud me suffisent!! ;-)
-
Je suis habitué au ciel profond avec des gros newtons ouverts et des CMOS avec de petits pixels, donc pour moi un machin ouvert à 10 c'est pas le top. Mon but est de faire des occultations en CMOS (ZWO 533) en tout automatique avec NINA et Sharpcap. La reconnaissance de champ avec une focale de 3000mm donne un champ ridicule et donc échoue souvent. De plus des pixels de 3.6um c'est du suréchantillonage. Enfin, ouvert à 10, faut poser plus car c'est pas lumineux, donc moins de précision temporelle pour les occultations. Donc besoin d'un réducteur qui donne des images correct, mais bien évidement pas en visuel!!
Michel
-
2
-
-
Bonjour,
J'ai un LX200 12" UHC, F/D=10 donc totalement inutilisable pour le ciel profond et en particulier les occultations que je veux faire. Je cherche à mettre un correcteur, quel modèle marche bien pour cette daube?
Merci
Michel
-
On fait presque pareil avec notre image de Janus sud ;-)
-
1
-
-
Bonjour à tous, content de voit que les "petites modifs" sur le télescope donnent de bon résultats (juste 12j de boulot intense avec une équipe de bras cassé, Laurent avec des douleurs partout et moi le dos bloqué, pas bon de vieillir), mais bon maintenant le télescope est une petite merveille, et j'ose même dire que je n'ai pas envi de prendre une masse pour le casser, Laurent va être content!!! Le direct drive fonctionne maintenant nickel dans toutes les directions.
Maintenant on réfléchi a améliorer Janus Nord, la aussi ya du boulot.
Merci de vos commentaires
Janus Team
-
1
-
-
Punaise ça sort bien avec seulement 1h de luminance, bravo.
-
 1
1
-
-
Whaouh, pas de doute ça dépote!! Comme dit mon ami Laurent, le matos plus le pilote et zou!!
Bravo
Michel
-
1
-
-
Bonjour,
Sympa cette image, pas facile à faire avec un APN, même défiltré, bravo. Reste à passer à une bonne CMOS et 20h de pose!! ;-)
Je ne connaissais pas cette objet, je sens que cela va donner de idée à Laurent pour Janus nord.
Michel
-
1
-
-
Bonjour,
ENFIN! On a réussi le passage de V1 à V2 de Janus Sud (télescope remote 520mm au Chili).
Voilà les modifs avec quelques commentaires:
- en mécanique, on a rigidifié le tube avec des attaches des barres bien plus rigides et passage de 32mm à 50mm des barres de carbone. Résultat, le télescope n'oscille plus avec le Direct Drive. Au passage, le direct drive c'est super, mais ce n'est utilisable qu'avec une monture et un télescope conçu pour cad très rigide. Si vous avez une monture qui plie un peu, un tube pas super béton, n'envisagez pas de passer à ce type de motorisation, les oscillations vont apparaitre de partout. Par contre maintenant, par vent nul le télescope suit aux alentours de 0.05" d'arc!!
-coté caméra passage à une ZWO6200, on quadruple le champ et on améliore la sensibilité. Évidemment, changement de correcteur de champ, et là c'est the merveille, un correcteur conçu par Laurent Bernasconi et Cyril Cavadore et commercialisé par Alcor System. Un correcteur 4" qui donne des images piquées sur tout le champ (1°x40'). D'après Laurent, il travaille mieux que le 4" ASA, d'ailleurs difficilement trouvable. Je mets en pièce jointe une image brute d'un bout du petit nuage de Magellan. Changement aussi de la roue à filtres avec des filtres 50mm de 3nm en Ha, OIII et SI. Pour le porte occulaire, un Esatto 4" de chez Primalucce. Après des déboires avec ce focuser, Primalucce à changer leur firmware qui ne valait pas tripettes, et maintenant c'est nickel.
En analysant tout cela, on est maintenant convaincu avec Laurent, je fais me faire des ennemis, mais l'intérêt d'un RC face à un newton, ya pas photo. On a un champ énorme et un échantillonnage optimisé avec 0.4" par pixel. Par contre grosse image de 62MPixels.
Au final, beaucoup de travail pendant 15j au Chili, et pas mal de mise au point ensuite depuis la France. L'aide de Raymond et Audrey sur le site de la Canelilla ont été précieuses.
Maintenant, on a hâte d'utiliser à fond le télescope et on attend avec impatience les nuits d'été là-bas, quand la turbulence descend allègrement sous la barre des 2" de seeing.
Michel et Laurent
Team Janus



-
10
-
10
-
-
Pour finir le message de Laurent, les 2 choses buguées dans ce focuser sont:
- le rattrapage de jeux en interne qui se fait à chaque changement de direction, ce qui est absurde
- visiblement la fonction qui permet de savoir si un déplacement est fini, renvoie un "fini" alors que le focuser est encore dans la rampe de décélération. Du coup le déplacement suivant de fin de correction de jeux est envoyé trop tôt et perturbe complètement le focuser.
C'est pas sérieux pour une boite comme Primalucce. Le pire c'est leur négation des problèmes surtout quand c'est moi. Si c'est une boite pro, là, il la ramène moins.
Le pansement de Cyril corrige visiblement le truc, mais on espère qu'ils vont quand même réagir.
Pour la vérification du matos avant le Chili, évidemment qu'on a fait le max, mais pas sur un produit d'une boite qui a pignon sur rue. Sinon tout le reste à marché bien, avec des réglages sur place bien-sur, le tilt étant infaisable en France puisque Janus Sud est déjà là-bas depuis 4ans et demi.
En tous cas bien content de ne pas avoir un RC car là on a champ d'enfer, sans sur ou sous échantillonnage.
-
Pour info, si cela marche chez certains, c'est aussi pour ceux qui travaille avec des RCs, en effet la tolérance de mise au point sur F/D=8 n'est pas la même que notre Newton F/D=3.5! et en plus des pixels de 3.8µm.
-
1
-
-
Ouch, heureusement que tu ne conçois pas des PO!!!

De plus on ne connaît jamais bien le jeu, et il évolue avec le temps.
-
Voici le message envoyé à Primalucce qui explique le rattrapage de jeux:
Hello,
I am going to explain you why your wrong in your backlash compensation.
Imagine a backlash of 1000 steps, a backlash compensation of 2000 steps and an initial position of 10000 after several negative moves, it look like that.
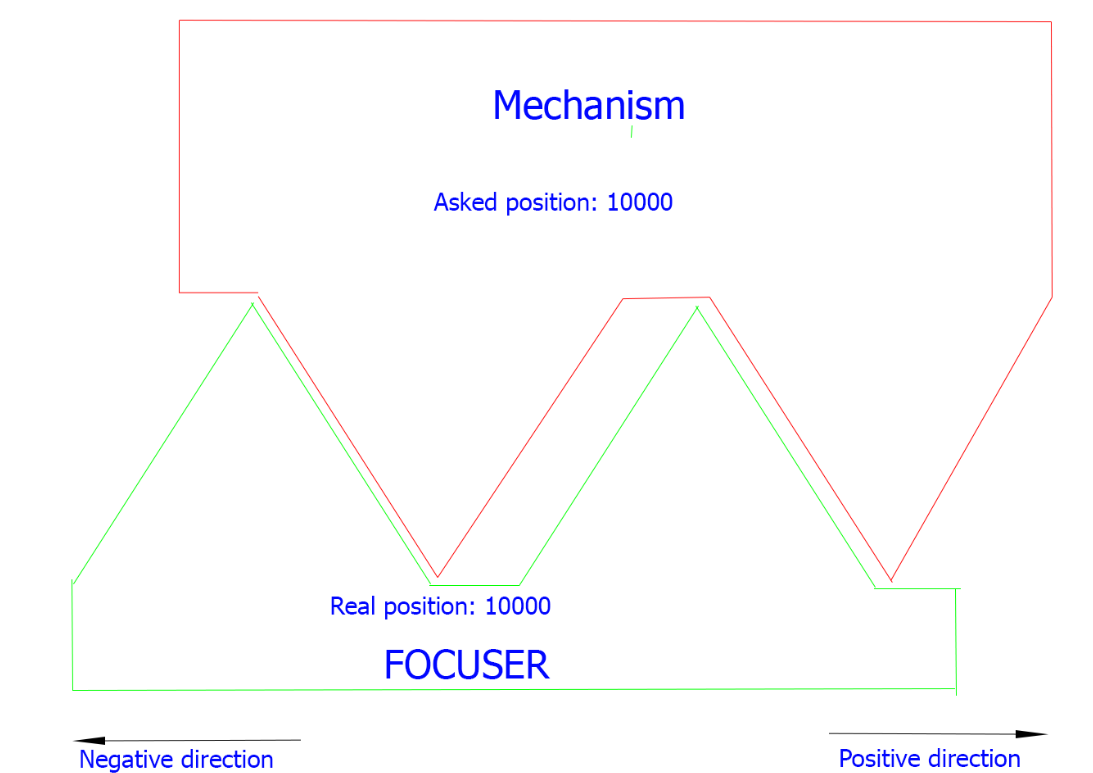
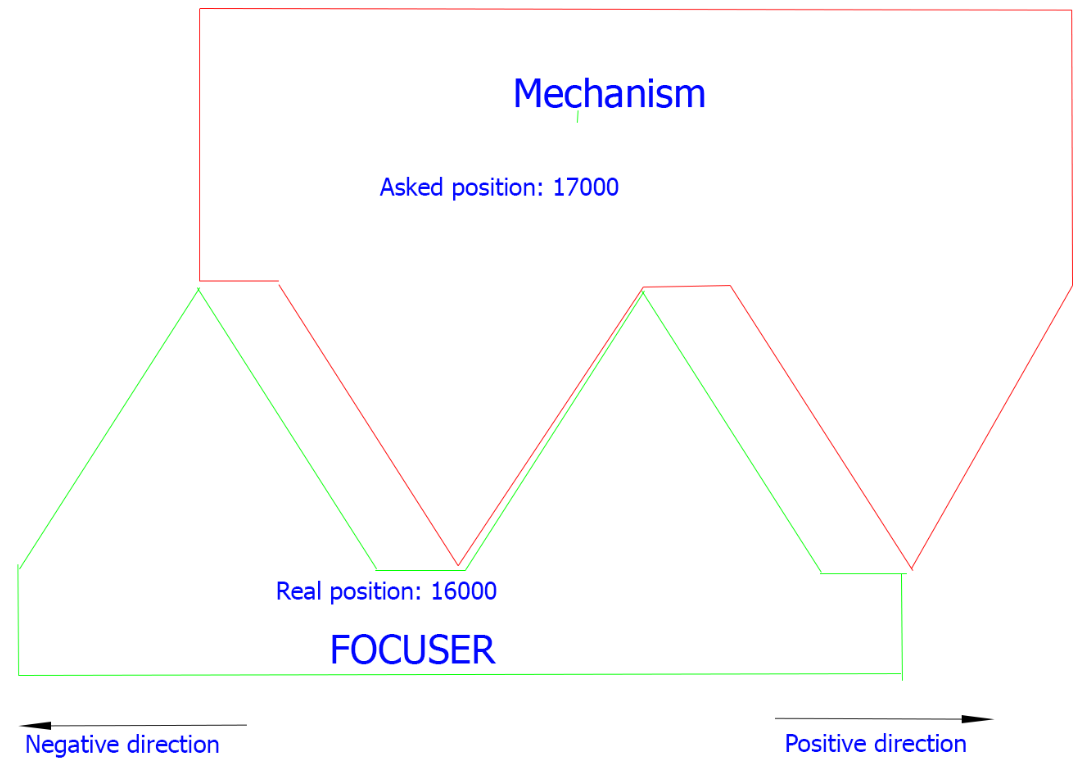
Now a positive ask for a position of 15000. As the direction is not the same as the previous one, we are going to have a backlash compensation. So the first order is goto 15000+2000=17000, but due to the backlash, at the end you will have a true position of 16000, it will look like that:
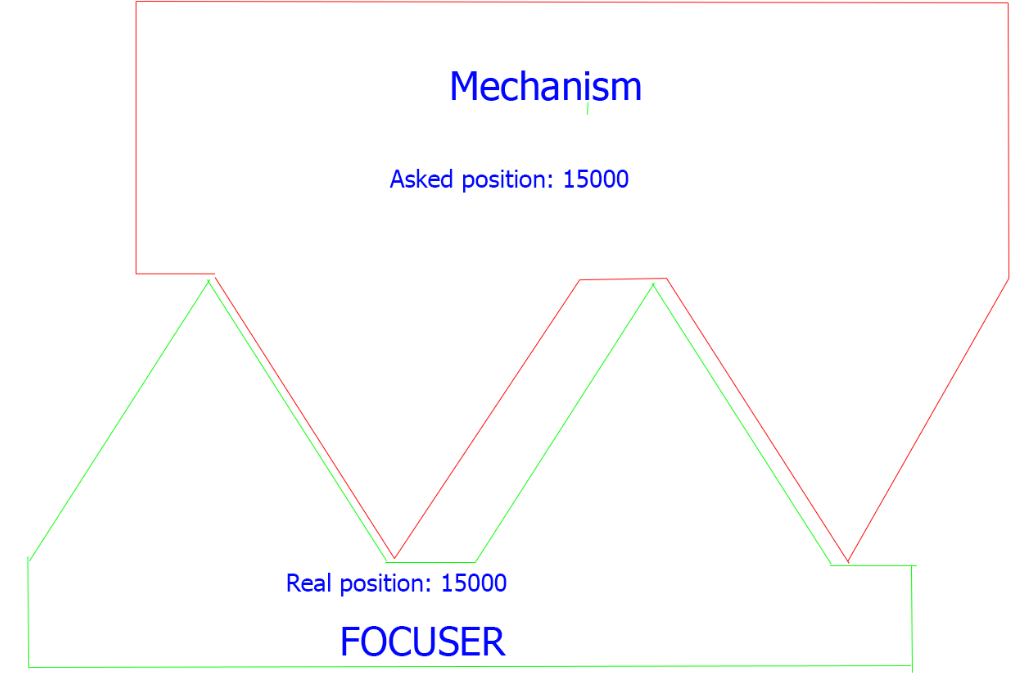
To complete the compensation, you are going to have a goto of 17000-2000=15000. There will be a move of only 1000 steps due to backlash, but as the position was already 16000, you have at the end the proper position of 15000, and it looks like that:
For instance, it's perfect. Now we ask for the position 18000. As the previous move was in the same direction, no backlash compensation. So we have a goto order of 18000, but the final position will be 17000 due to backlash:
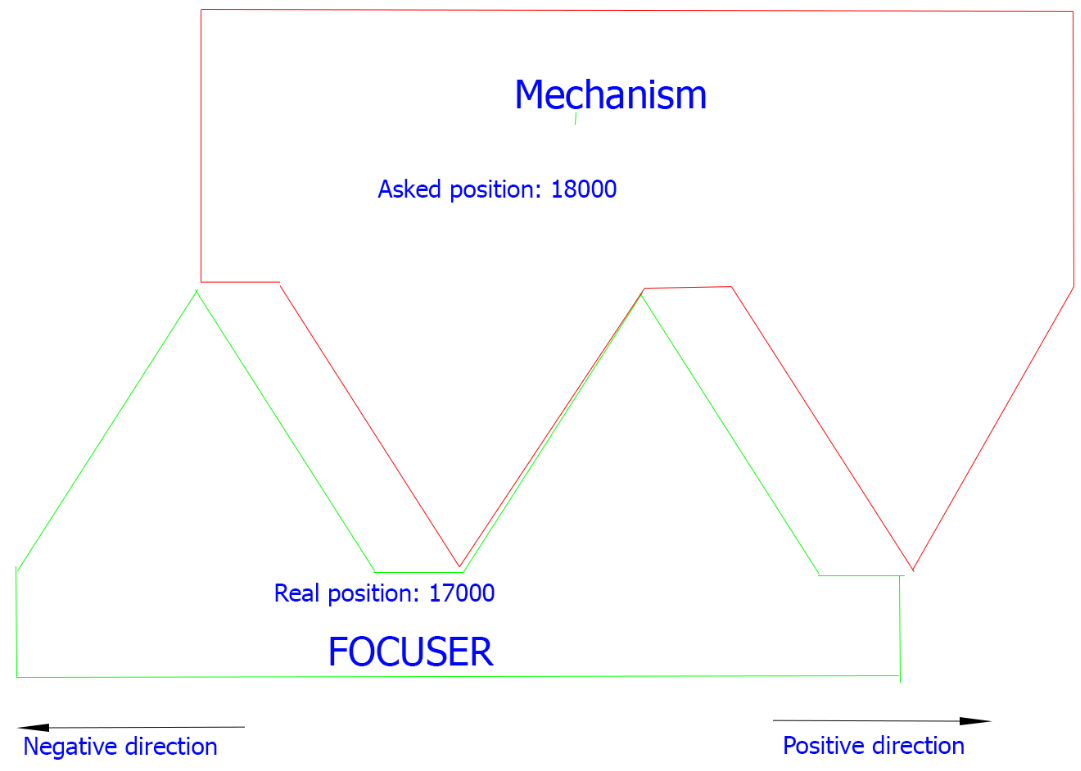
So at the end you have an error equal to the backlash because the backlash is less than the movement asked.
To resume, the only way to compensate the backlash, is to decide in which direction you want to make the backlash compensation (for example in positive direction), and next two cases, negative direction: no compensation (never!!), positive direction: compensation (always!!).
In fact, that is very simple, and it's for example the same thing when you used an old lathe or milling machine, you compensate in one direction only, it's the same thing when you have a worm gear in your declination and you want to compensate backlash (I know very well that problem because I have written the ASCOM driver for MCMT32, a system for motorized telescope). And I can tell you that we have improper automatic focus due to your wrong algorithm.
-
1
-
-
En tous cas, imprécision sur mon Esatto4" et sur un Esatto 2" tout neuf sur un banc test avec un micromètre.
-
1
-
-
Le rattrapage de jeux se fait à chaque changement de direction, c'est aberrant. Normalement le rattrapage de jeux se fait systématiquement dans une direction, et pas du tout dans l'autre, d'ailleurs quand je leurs ais expliqué cela, ils avaient l'air étonné, flippant. Après le décalage systématique de la valeur après de nombreuses focalisations dans une nuit, alors que le PO est toujours à peu près dans la même position, on ne se l'explique pas! J'ai sniffé ce qui passe sur le port RS232, c'est de la folie pour un PO, c'est une sorte de serveur JSON; c'est bien trop compliqué pour un simple PO. Toutes les autres marques de PO ont des protocoles vachement plus simple, surtout pour du RS232. Alors l'Esatto c'est beau, mais c'est pour l'instant de la m.... en boite. J'espère que c'est juste un problème de soft, et non pas en plus un problème mécanique. Visiblement Primalucce c'est de la comm mais derrière ils sont incompétents. Une dernière couche, le pas de focalisation est de 0.03417µm, 34nm, et puis quoi encore; sur la doc il donne 0.04µm car ils ont arrondit 0.03417 à 0.04, va falloir que je refasse des maths :-( Vous avez compris, je suis très très en colère, le télescope est à 12000km et je ne peux rien faire pour l'instant.
-
 1
1
-
-
Bonjour,
Nous avons avec la nouvelle caméra de Janus Sud (520mm avec ZWO6200) un porte oculaire 4" Esatto de chez Primaluce. C'est la catastrophe. Le rattrapage de jeu est aberrant. Ils font un rattrapage de jeux à chaque changement de sens. Sur le coup j'ai cru à une erreur de ma part, mais non! De plus sur l'utilisation sur une nuit, on a eu en fin de nuit un décalage de près de 4mm sur la valeur donnée, pourtant le PO était à peu près en même position!!! Même avec un rattrapage de jeux externe, il y a des décalages. Une autre personne a fait des tests avec un Esatto 2" et un comparateur, c'est pareil, INUTILISABLE, en tous les cas pour de l'observation auto. De notre coté, pour l'instant, on est bloqué, on a solutionné nos problèmes de vibrations avec le direct drive, on a changé pour une grosse caméra et un correcteur 4" de compétition, et pour finir le télescope est inutilisable en remote. Primaluce doit regarder, mais franchement cela ne fait vraiment pas sérieux. Jusqu'a nouvel ordre, EVITEZ ce PO.
-
4
-
4
-
-
Il y a 5 heures, Nathanael a dit :C’est un peu en marge du débat, mais on peut effectivement imaginer un miroir sur trois points ET soutenu par un cousin d’air dont la pression, légèrement inférieure au poids du miroir pour que les trois vis assurent leur fonction, est donnée par un ou des leviers astatiques. Plus de problème de répartition de la charge ni de déplacement. Ce n’est peut-être même pas si compliqué à réaliser. Ça a été tenté? Un biais? Modélisable?
Le problème que je vois est que la pression sera uniforme sur le dos du miroir, mais au centre le miroir est moins épais, donc une pression non-uniforme.
Sinon, de mon coté j'ai le 520 qui est sur 6 triangles, 3 réglables pour la colim et 3 sur leviers astatiques. C'est une solution mixte, qui limite le nombre de levier. Le calcul avait été fait par Luc Arnold, et j'avais vérifié sur Solidworks, c'était tout bon. Malheureuement cela ne retire pas l'astigmatisme du miroir par le tailleur (D.V).
Pour les déformations de la tranche, on est quasiment obligé de travailler dans le plan du centre de gravité) sinon le contact peut-être plus facilement perdu sur certains points d'appuis.
Michel
-
Il semblerait qu'il y ait aussi un problème dans le driver ascom, il retourne "déplacement terminé" avant la fin, du coup le rattrapage de jeu logiciel déconne. On a essayé, en début de nuit foc environ 10mm, fin de nuit 6mm !!!!!! alors qu'en fait le focuser était toujours en position aux alentours de 10mm.



Premier essai Lune
dans Astrophotographie
Posté(e)
Faut imaginer que vous êtes dans l'hémisphère sud!!