

mala05
-
Compteur de contenus
573 -
Inscription
-
Dernière visite
-
Last Connexion
Soon available - 49925
Messages posté(e)s par mala05
-
-
il y a 3 minutes, messier63 a dit :Un dispositif pour voir la mise au point?
En fait c'est tout l'inverse du coup. Astroced69 a vu juste.
")
-
il y a 22 minutes, AlSvartr a dit :non rien
Ça sent la connerie! lol

-
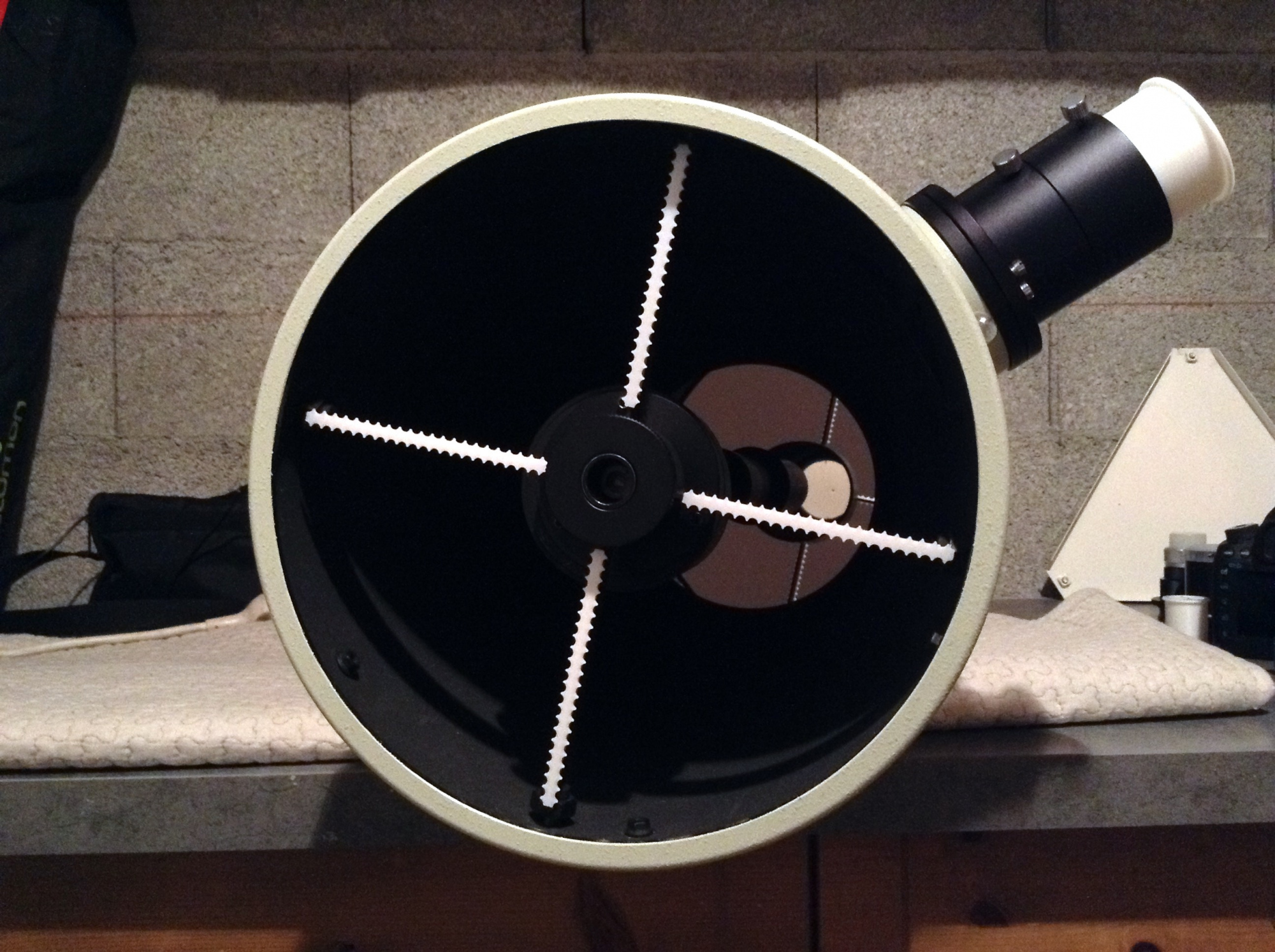
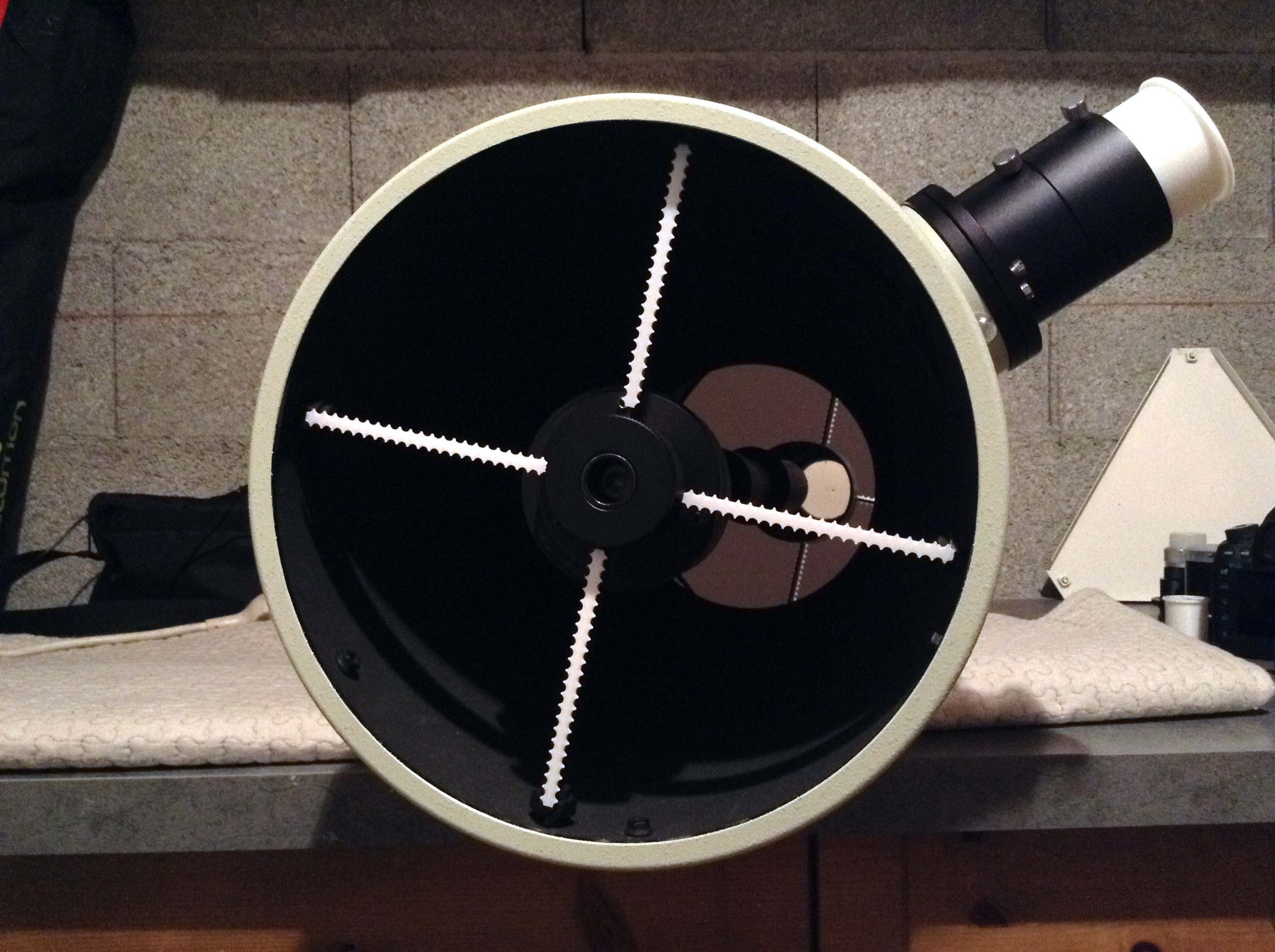
il y a 24 minutes, Astroced69 a dit :Masque anti aigrette!!
Et oui! Bien vu Astroced69! Il me reste à les peindre et à tester.
La manip est inspirée de l'article de Serge Bertorello:
http://serge.bertorello.free.fr/antiaigr/antiaigr.html

-
 1
1
-
-
il y a 40 minutes, Raphael_OD a dit :des branches d'araignée je gagne quoi ?
On est mal si tu veux tenir un secondaire avec des allumettes de quelques millimètres!
-
 1
1
-
-
Une petite devinette sur ma dernière réalisation (pas encore testée sur le terrain). Je pense que certains vont trouver facilement.
Le plus souvent par quatre tu m'utiliseras.
Alors l’œil à l'oculaire disparaitre tu les verras.
Newton ou lunette visuellement plus tu ne sauras.
Quoi suis-je?

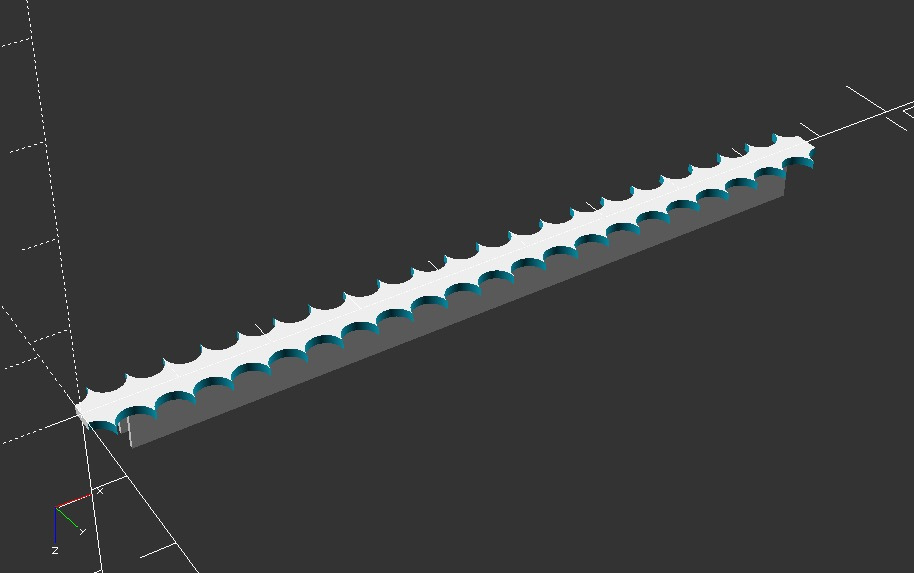
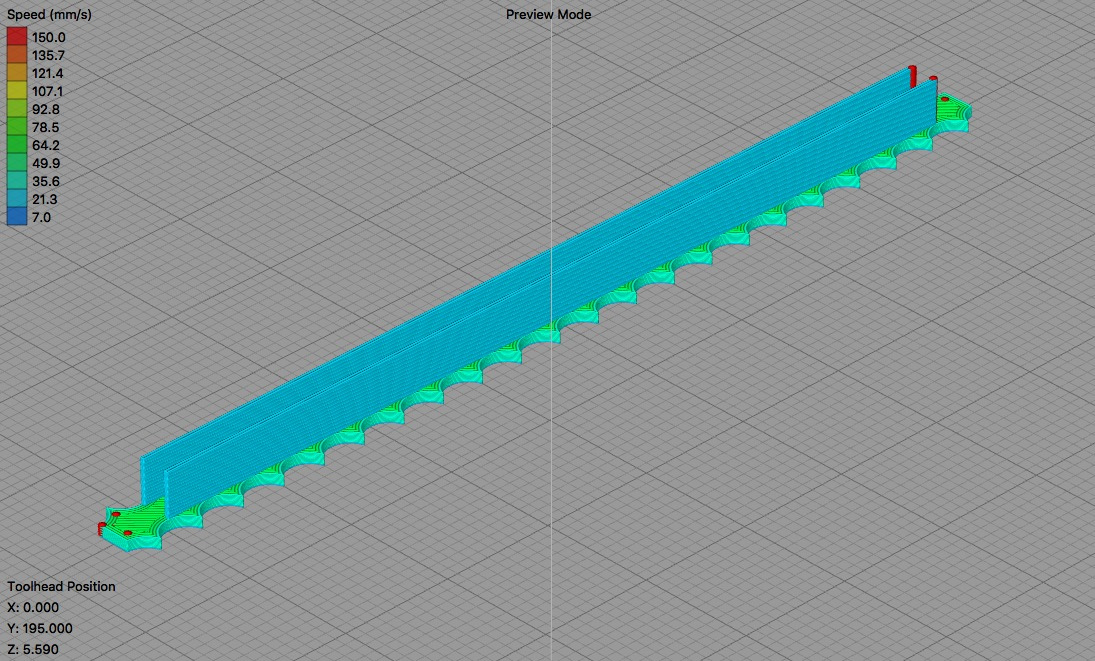
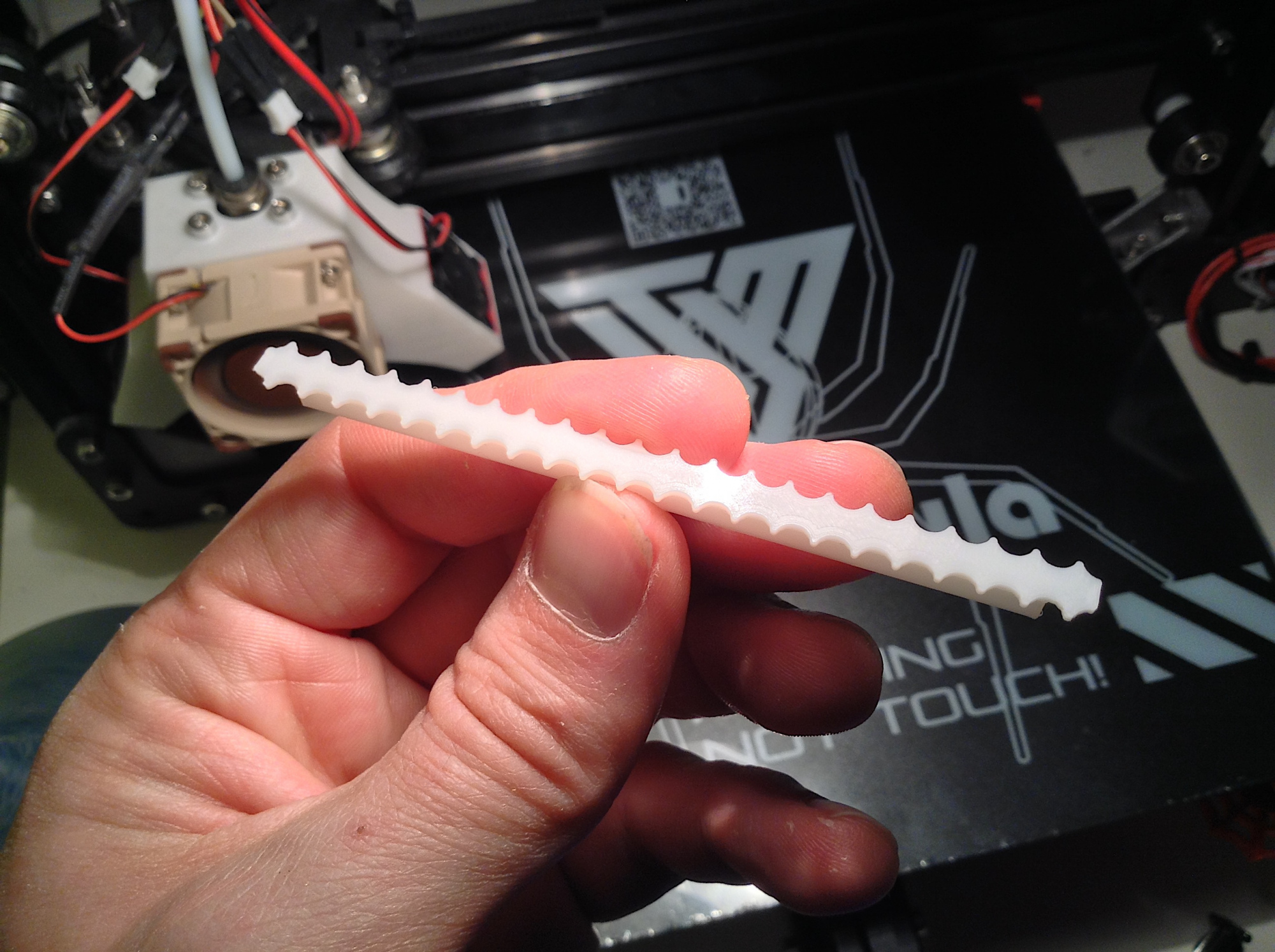
Un aperçu de la pièce imprimée pour aider... ou pas.

-
Génial Valère! Le potentiel est vraiment bluffant. Je n'ose imaginé avec des conditions météo optimales.
-
 1
1
-
-
Il y a 4 heures, mala05 a dit :Tu sais si le type II fait mieux niveau vignettage en restant sur du 2 pouces?
Je m'auto réponds après lecture du test très intéressant de Frédéric Jabet dans Astrosurf-Magazine N°50 de 2011. Il semble que ce soit kiff kiff entre les deux avec un vignettage de l'ordre de respectivement 46% pour le type I et 45% pour le type II si on est contraint par une bague de réduction T2 (ce qui est mon cas avec l'APN).
-
Il y a 1 heure, olivdeso a dit :Televue avait d'ailleurs fait une version spécifique du type 1 pour le Full Frame. C'est mieux, mais il en reste pas mal quand même.
Tu sais si le type II fait mieux niveau vignettage en restant sur du 2 pouces?
-
M'interrogeant sur l'intérêt de passer du Paracorr Type I à la version II et trouvant peu de sujets sur la vieille version du Paracorr avec des Newtons autour de F/4, je vous partage mon expérience si certains sont intéressés. Les tests mériteraient un meilleur seeing mais en ce moment c'est vraiment pas top depuis quelques mois.
Configuration de test:
Telescope: CN-212 Takahashi F/3,9.
Diamètre: 212mm.
Focale: 826mm.
Diamètre du petit côté du secondaire: 71mm.
Distance miroir plan / Foyer: estimé à 270mm mais à reconfirmer.
Vignettage d'origine à 22mm de l'axe: environ 40%.
Backfocus Paracorr: Télévue recommande 56mm +-4mm en fonction du setup. Sur mon Newton, sauf erreur, je suis à 56,4mm (Bague T2 de 10.4mm + 2 bagues allonge d'un mm + Backfocus de 44mm pour le 5D Mk III).

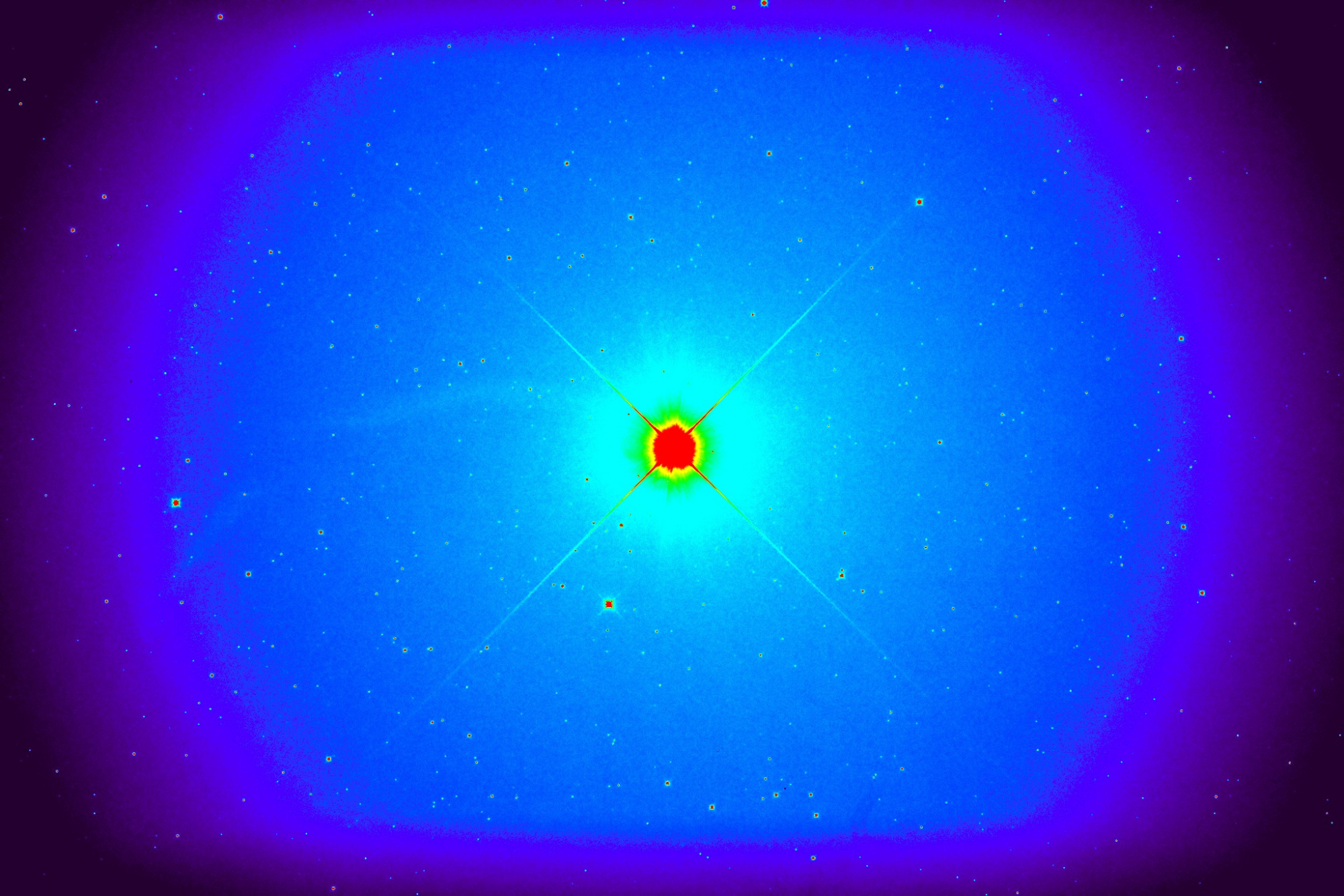
Lien vers la full: http://astronomy.eliotis.com/tmp/test-colim-12-05-2019.jpg
On constate que le champ est plutôt bien corrigé -en pinaillant un peu, j'ai un résidu de tilt en haut à droite- avec cependant un peu d'aberration chromatique qui apparait dans les coins. Par contre le vignettage est assez marqué.
Voici une version fausse couleur pour mieux visualiser le vignettage. En plus du vignettage normal, la partie basse montre un vignettage horizontal lié au 5D (épaisseur du miroir?). C'est aussi le cas en haut mais c'est beaucoup plus discret.
Sur cette seconde version, j'ai ajouté un recadrage à 90%, 80% et APS-C en surimpression...
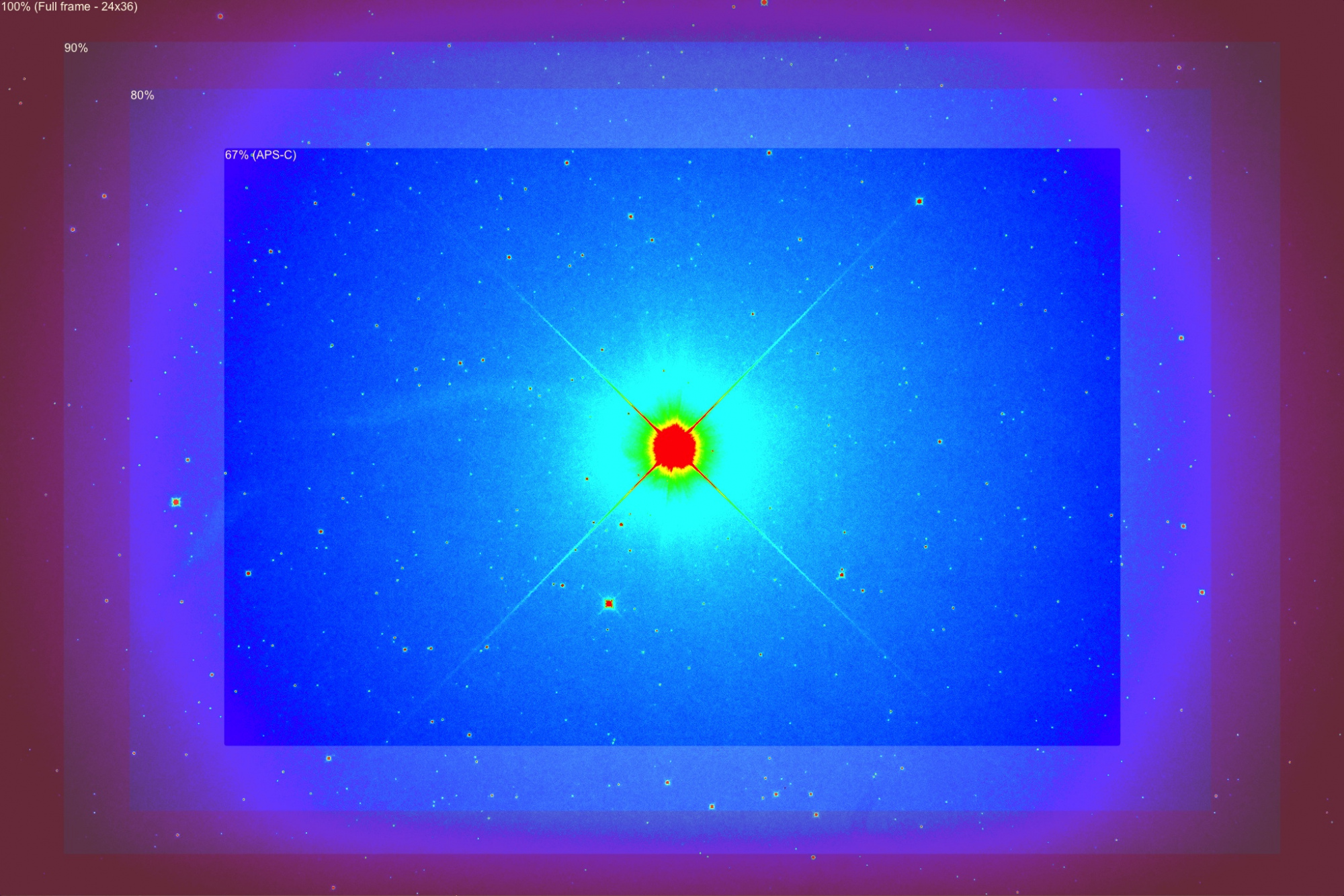
Avec un bon flat, je pense qu'on peut espérer exploiter sans problème entre 80% et 90% de la surface d'un fullframe.
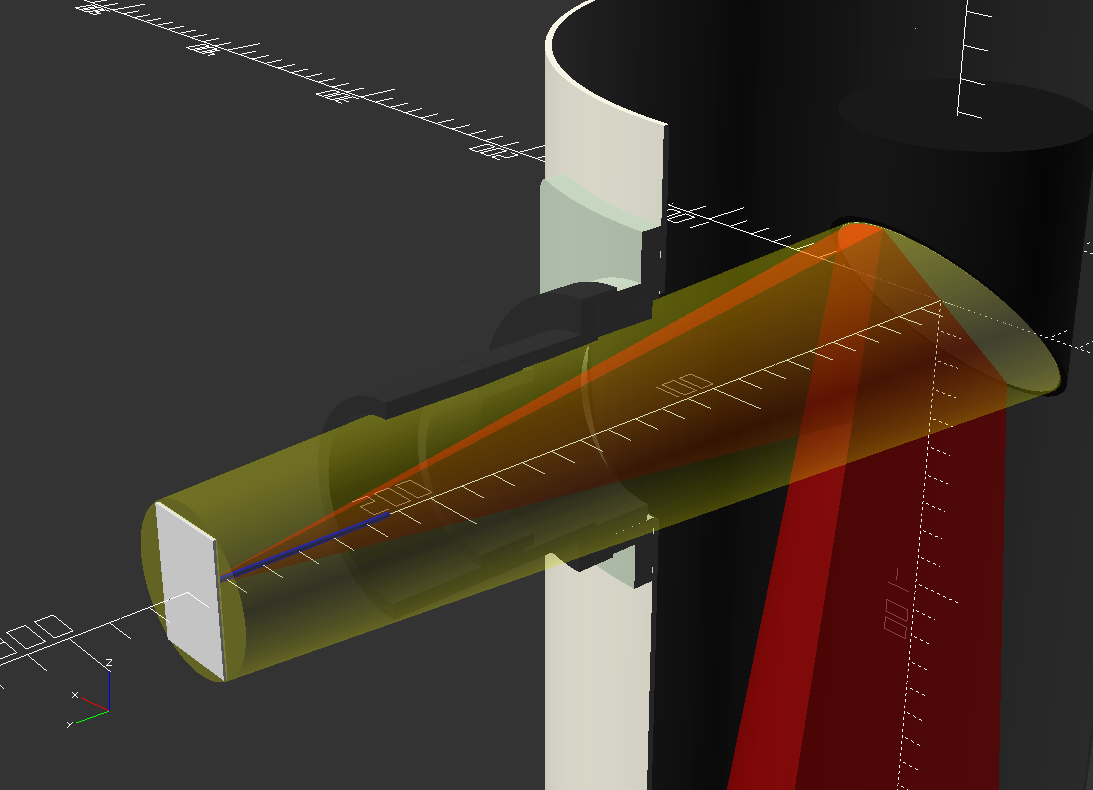
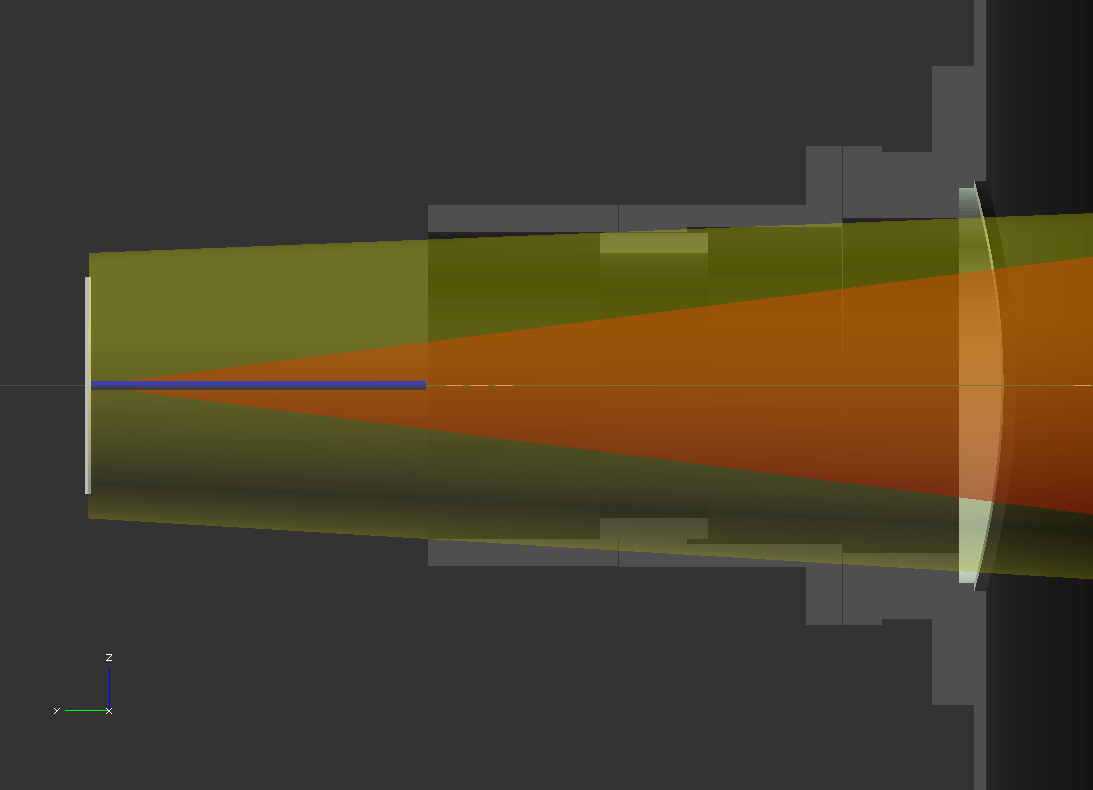
En l'état je me pose la question de savoir si le surplus de vignettage est entièrement imputable au Paracorr. Une ébauche de modélisation 3D de mon tube me laisse penser que la goulotte interne de mes bagues allonge 50,8 pourrait aussi jouer...
Si certains ont réalisé des tests équivalant avec le type II, je suis preneur d'un retour en image.
En espérant que mes investigations soient utiles à d'autres astrams avec un setup similaire,
Seb.
-
1
-
-
Superbe Philippe!
J'ai une question sur ta config à F/3.7 + correcteur Paracorr 2 + Sony A7S. Le vignettage est-il notable en fullframe avec le correcteur? J'ai le type I et je m'interroge pour passer au type II sur mon Newton F/3.9 mais j'ai du mal à trouver des comparatifs concrets sur la toile.
-
1
-
-
Des fois je me demande si cela vaut la peine de prendre le temps d'expliquer en fait...

Moi je confirme que, dans le contexte de mon intervention précédente si on prend le temps de me lire, et bien: " la perte de résolution sur la lum au final sera de l'ordre de 25% et pas 50%. Et cela c'est sans compter une éventuelle déconvolution qui permet de réduire encore la perte à disons 15% pour un bon algo."
Et je vais l'illustrer en image avec cette vieille M57 de plus de 10 ans réalisée à l'époque en one short avec une MX7C à matrice CYMG et dont les images brutes avaient été débayérisées avec un algo réalisé par mes soins...

Voici ce que cela donnerait si les propos de Colmic du départ étaient avérés...

Une perte de résolution de 50% serait équivalente à un binning 2x2 hors on voit bien avec ce gif zoomé que la résolution est bien meilleure en réalité. -pitié ne pas me faire le coup du "oui mais en bande étroite..." Lol -
CQFD ou pas CQFD?
-
1
-
-
il y a 55 minutes, patry a dit :(X-1,Y-1) (X+1,Y-1), (X-1,Y+1) et (X+1,Y+1) donc à une distance de racine(2) du pixel central ... elle est là la perte de résolution : 1,414... !
Pour compléter ton propos, ce qui fausse la donne dans l'esprit des gens c'est que la débayerisation ne saute pas de deux photosites à chaque pas mais bien d'un seul que ce soit en x et en y. Et c'est malheureusement de là que vient cette légende urbaine: capteur couleur = résolution divisée par deux.
il y a 55 minutes, patry a dit :mais en (X,Y) s'il n'y a pas de rouge ... bin y'en a pas, il faut bien le trouver ailleurs !
Et là encore cela floute la donne pour le néophyte car nous qui causons astro/capteur/optique on sent bien intuitivement en discutant ici que la résolution et bien finalement elle est variable. Plus la bande passante est étroite plus la perte de résolution est importante (d'où la remarque de lyl pour le solaire en H-alpha) mais l'inverse est aussi vrai: plus la longueur d'onde est étendue et plus la perte est limitée. Chose amusante, pour parler de résolution d'échantillonnage on prend souvent l'exemple d'une étoile ponctuelle en limite de résolution des photosites. Quel joli cas d'école! Mais vous en observez beaucoup vous des étoiles rouge sang dans le ciel lorsque vous levez les yeux?
") Même Antares ou Bételgeuse elles sont pas si rouges que ça si on y pense... -Après on peut toujours pousser les curseurs à l'américaine mais c'est une autre histoire.-
Même Antares ou Bételgeuse elles sont pas si rouges que ça si on y pense... -Après on peut toujours pousser les curseurs à l'américaine mais c'est une autre histoire.-
Moi j'aurais tendance à penser que mis à part pour l'imagerie solaire à bande étroite et éventuellement l'imagerie lunaire avec filtre de couleur pour limiter la turbu, les cas où l'imagerie N&B peut vraiment creuser l'écart en terme de résolution sont assez limités aujourd'hui en fait. On le voit bien avec certaines images couleur one shot à couper le souffle qui passent sur le forum que ce soit en ciel profond ou en planétaire.
-
1
-
-
Il y a 18 heures, Pascal C03 a dit :J'en parle à un collègue qui enseigne les engrenages... Lui ne voit pas pourquoi le changement de dent entraine une variation de vitesse puisque c'est bien une courbe de vitesse de rotation instantanée que l'on observe...
J'ai un peu de mal à me représenter physiquement ce qui se passe. Je ne sais pas s'il y a eu des études théoriques là dessus...
La rotation instantanée est constante (du moins en théorie) mais la liaison imparfaite entre les dents des engrenages fait fluctuer légèrement la vitesse linéaire. Je ne suis pas expert en mécanique mais je suppose que la forme idéale des dents est complexe voire impossible à usiner à la perfection. Il faudrait fouiller un peu sur le net. Ce genre d'étude mécanique doit se trouver je pense.
-
Comme disait Valéry: "On n'a pas de pétrole mais on a des idées!"

-
1
-
-
Le 08/04/2019 à 13:53, Colmic a dit :Au traitement, le logiciel va décomposer cette matrice de BAYER et recomposer 1 pixel couleur comme ceci :
Pour un point de l'image qui correspond à un pixel rouge du capteur :
R = Signal du pixel rouge.
V = Moyenne des signaux des 4 pixels verts voisins.
B = Moyenne des signaux des 4 pixels bleus voisins.Pour un point de l'image qui correspond à un pixel vert du capteur :
R = Moyenne des signaux des 2 pixels rouges voisins.
V = Signal du pixel vert.
B = Moyenne des signaux des 2 pixels bleus voisins.Pour un point de l'image qui correspond à un pixel bleu du capteur :
R = Moyenne des signaux des 4 pixels rouges voisins.
V = Moyenne des signaux des 4 pixels verts voisins.
B = Signal du pixel bleu.C'est pour ça qu'on a l'habitude dire qu'un capteur de 1000 x 1000 couleur a la même résolution qu'un capteur 500 x 500 monochrome
Un capteur couleur est donc 4x moins résolu que le même capteur noir et blanc.
Alors non techniquement ce n'est pas ça. Pour en avoir codé quelques uns sur des matrices RVB et CYMG, un bon algo de dématriçage va travailler en LRVB dans un premier temps. La couche de chrominance va être effectivement équivalente à du binning 2x2 mais pas luminance. Pour faire court, la perte de résolution sur la lum au final sera de l'ordre de 25% et pas 50%. Et cela c'est sans compter une éventuelle déconvolution qui permet de réduire encore la perte à disons 15% pour un bon algo.
-
1
-
1
-
-
Ok. Entre deux 2 pignons de dents Z1 et Z2, je vois à minima le décentrement de l'axe (période proportionnelle à la vitesse de rotation d'un pignon) et potentiellement le voilage/inclinaison de chaque pignon (période proportionnelle à la vitesse de rotation du pignon/2 si mon intuition est bonne). Et à cela j'ajoute le changement de dent bien sûr. Donc pour deux engrenages, cela me donnerait potentiellement 5 modes de vibrations pour reprendre ton terme.
-
Il y a 12 heures, Pascal C03 a dit :sinon, je suis curieux de savoir combien tu vois de modes de vibrations pour disons, juste 2 pignons de dents Z1 et Z2...
Tu entends quoi par "modes de vibrations"? Je ne comprends pas.
-
One more thing...
J'ai adopté une nouvelle petite Japonaise de 28 ans...

Et le nouveau boitier pour la carte MKS de l'EM-10, je l'ai pensé aussi pour elle forcément...


-
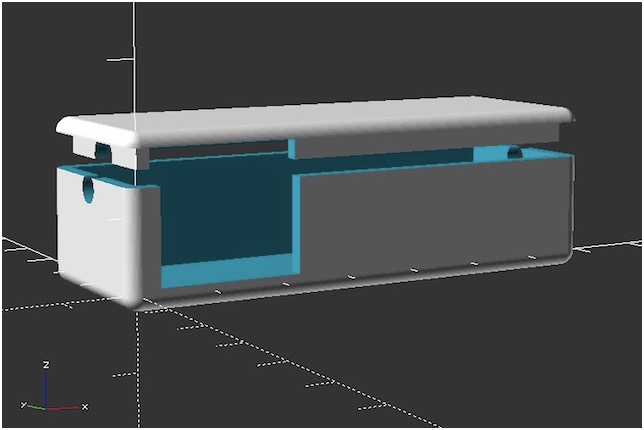
Voici l’EM-10 en l’état de son avancement. Le projet a fait un sacré chemin depuis ses débuts! Cela commence à avoir vraiment de la gueule...


Le boitier abritant la carte MKS a été repensé en positionnant les composants face à l’intérieur de la monture. Cela m’a permit de placer tous les connecteurs en bas mais aussi de dégager de l’espace pour le passage de l’encodeur de l’axe R.A...


C’est moi ou bien il a un petit côté Star Trek Enterprise ce cache?

La tension d’alimentation est maintenant régulée par un Pololu S18V20F12 12V Step-Up/Step-Down (récupération de mon tout premier proto) mis en boiter avec interrupteur...

Et pour finir j’ai revu le boitier du PI Zero du proto de viseur polaire en l’inclinant de 90° pour un accès plus pratique aux ports par le dessous...

Restera à voir le connecteur du câble du moteur de mise au point du CN-212 qui dans l’immédiat est encore câblé directement en interne sur la carte. Je pense partir sur du RJ-9 histoire d’avoir quelque chose de compact.
-
1
-
-
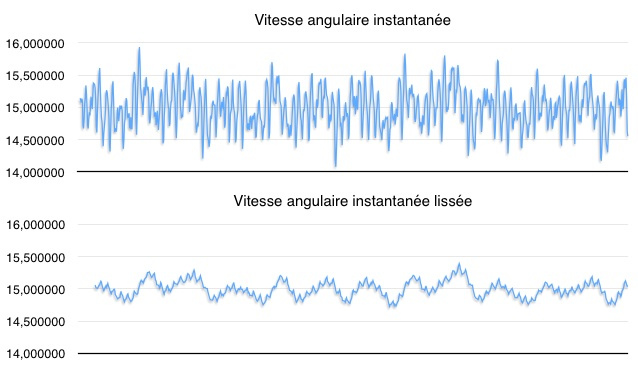
Dernier progrès en date, j'atteins maintenant les +- un pas codeur soit +-2,25" d'arc...
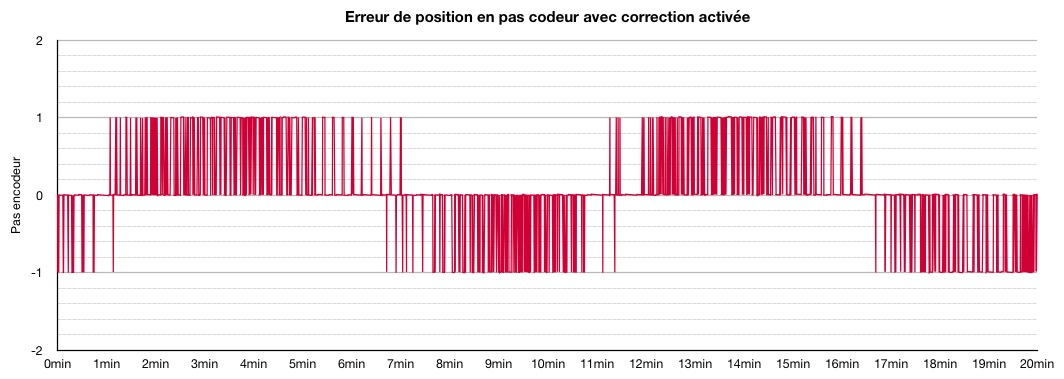
J'espérais réussir à descendre sous la barre du pas codeur mais pour une raison que j'ignore encore je rentre en raisonnance. Je verrais plus tard, c'est déjà excellent en l'état.
A noter que l'asservissement entraine une légère dérive plus ou moins importante en fonction des réglages. Mon interprétation c'est que l'EP, du fait des imperfections mécaniques, n'est pas parfaitement symétrique. Ce n'est pas bien méchant à l'usage car la dérive est linéaire. Il suffira de compenser en jouant très légèrement sur la vitesse théorique. Voici ce que cela donne en l'état sur une heure de suivi (6 tours de vis sans fin)...
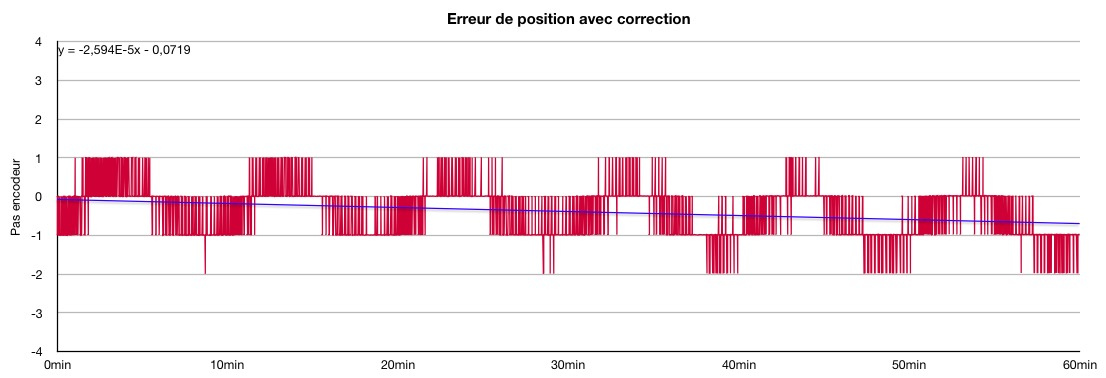
-L'augmentation progressive d'un pas codeur en fin de mesure vient en fait juste du chevauchement lié à la dérive.-
Avec une dérive de moins d'un pas codeur (<2" d'arc à vue d'oeil) sur une heure, là aussi c'est excellent. Il me tarde de recevoir le nouvel encodeur avec signal d'index.
-
2
-
-
bandido, d'après la doc, sur la CRUX 170 le PEC doit être ré-enregistré à chaque session...
 Citation
CitationIf there is no home sensor (CRUX 170, etc.):
Refresh the PEC Training. The PEC function uses newly trained PECdata.
If there is home sensor (Early CRUX 200, etc.):
Source: https://docs.wixstatic.com/ugd/b7b1c8_50eb9201207a4bac879f85513adaad72.pdf
-
Il y a 8 heures, Cyrille Thieullet a dit :avec un suivi sans guidage à +/- 2arc.
Erreur périodique sans PEC+/- 16 arcsec
Erreur périodique avec PEC+/- 3 arcsec
-
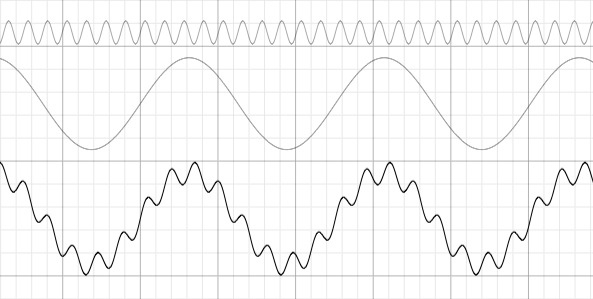
Les premiers tests d'asservissement d'EP laissent augurer de très bonnes choses. Du fait du bruit que cause le moteur PAP, j'ai été contraint d'augmenter le lissage sur 27 lignes codeur (4s). Echantillonnage et correction restent néanmoins à 6,6666Hz grace à une moyenne par fifo glissante (même principe que pour l'amélioration du signal tactile de l'écran 4,3")...
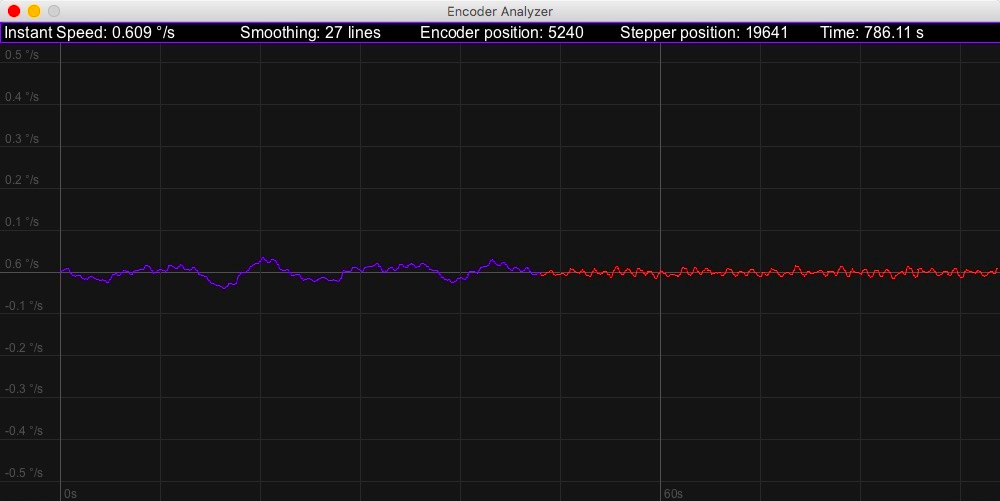
Sauf erreur d'interprétation, les micros erreurs résiduelles non corrigées viennent de la rotation de l'axe moteur (un tour par seconde environ) en tout début de chaîne avant même la démultiplication 1/500 intégrée.
L'asservissement étant réalisé sur la variation de vitesse, il est intéressant de voir ce que cela donne en terme d'erreur de position à l'arrivée...
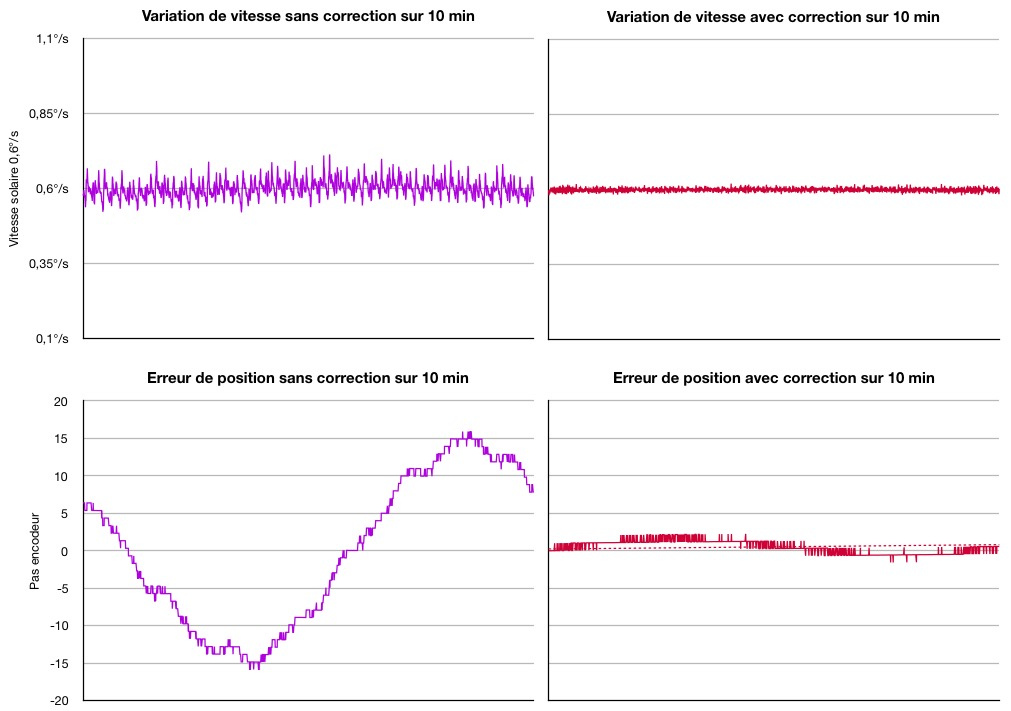
La courbe violette en bas à gauche montre l'erreur de position avant correction. La sinusoïde principale vient en faite d'un décentrement de l'axe de l'encodeur. Faute de mieux pour démarrer mes essais j'ai réalisé une allonge en impression 3D pour fixer l'encodeur à la vis sans fin. C'est un mal pour un bien car cela permet de bien voir l'impact de l'asservissement en générant une EP factice de +-16 pas codeur soit +-36" d'arc. Chose plus "réelle", on retrouve la petite sous sinusoïde que j'avais déjà identifié avec mon analyseur d'EP vidéo fait maison...
Avec sa période d'une minute et vingt huit secondes, c'est typiquement le genre d'EP qui se déphase progressivement au fil du temps par rapport à la période de l'EP principale de la vis sans fin...
Et c'est là qu'un correcteur d'EP à double étage devrait faire toute la différence.
Venons en maintenant à la courbe rouge de droite. On constate que l'EP principale a été réduite à +-1,64 pas codeur soir +-3,7" d'arc. La petite sous sinusoïde a complètement disparue. C'est quasiment une amélioration d'un facteur 10. Pas mal pour un encodeur 1000 lignes à 20€ et un peu de jus de cerveau...
Je vais voir pour faire usiner une pièce allonge de qualité et j'ai commandé le même modèle d'encodeur mais avec signal d'index en plus (position zéro) . Comme ça je disposerais d'une origine fixe pour la mémorisation de l'EP principale du second étage de correction.
-
2
-
 2
2
-
1
-
-
il y a 3 minutes, skywatcher a dit :Les nouvelles versions de sharpcap font aussi l alignement polaire donc pourquoi il n est question que de la version 2.9 ?
Il me semble avoir lu sur le forum que la 2.9 était la dernière version gratuite si je ne dis pas de bêtise.




{kind=link}
Devinette astro du père Fouras... ou pas. ;)
dans Astronomie pratique
Posté(e)
Ha oui Il y avait de l'idée!")
Non en fait je suis tombé sur l'article de Serge hier et je me suis dit que cela valait la peine de tester d'autant qu'en impression 3D on peut faire léger et assez fin. En règle générale je trouve les aigrettes assez esthétiques sur un cliché mais parfois ça gâche un peu pour certains sujets. Et pour peu d'avoir une étoile très brillante en bord de champ, les aigrettes peuvent partir en live avec l'obstruction et l'effet de coma. Du coup why not...