

mala05
-
Compteur de contenus
573 -
Inscription
-
Dernière visite
-
Last Connexion
Soon available - 49925
Messages posté(e)s par mala05
-
-
il y a une heure, FroggySeven a dit :Pourquoi ne pas utiliser effectivement une caméra au foyer de l'optique principale ?
Essaye et tu seras fixé.
Un facteur important à prendre en compte c'est le rapport emmerde/vitesse de mise en oeuvre/précision. Et là les viseurs polaires optiques (si de qualité) ou numériques sont loin devant. Perso, je ne me verrais pas appliquer la méthode évoquée par Colmic à chaque sortie (sous réserve d'avoir accès à la polaire en visuel bien sûr).
D'ailleurs je te cite Colmic sur l'autre discussion...
") Citation
CitationAvec mon EM200 jetée à l'arrache dans la pampa, visée polaire simple, aucun autoguidage.
Des poses de 90s à 1" d'arc d''échantillonnage, aucun déchet.
-
Les viseurs polaire numériques sont très précis.
Je suis en train de bosser sur un équivalent avec un Raspberry PI Zero + camera PI + Mini objectif CS de 25mm F/1.2.
Le budget devrait tourner autour des 40 euros pour peu de se faire une adaptation soi même pour sa monture.
Pus d'infos ici sur l'avancée du projet sur mon blog...
http://www.em10-usd-arduino-takahashi.eliotis.com/blog/index_files/tag-viseur-polaire.html
-
 3
3
-
 1
1
-
-
Il y a 2 heures, FroggySeven a dit :C'est la jonction couronne déformable / axe de rotation de sortie que j'ai du ma à imaginer.
Une seule pièce déformable ???
Cette vidéo explique bien le principe sur leur site...
-
 1
1
-
-
Et après Petit Ours? Je parlais sans PEC. A ce prix là les concurrentes ont aussi un système PEC et font tout aussi bien une fois ce dernier activé. Le seul avantage que je lui concède c'est la quasi absence annoncée de jeu qui peut être un plus lors du guidage en déclinaison s'il y a besoin de rattrapage faute d'une bonne mise en station.
-
Je rejoins scc. 5.790,00 € TTC la Crux 170 pour une EP annoncée de +-20" d'arc sans PEC cela fait cher payé. A ce tarif n'importe quelle monture concurrente est sous la barre des +-5"...
-
J'y ai songé d'autant que son axe d'A.D. dispose d'un met plat accessible, prévu je pense initialement pour un encodeur déjà à l'époque, mais cela défigurerait ma petite Taka.
-
il y a une heure, Pascal C03 a dit :Comment mesures-tu les variations de vitesses en dehors de visées sur le ciel ?
Je mesure non pas les ticks de l'encodeur mais le temps écoulé entre deux ticks lors de la levée d'interruption. Connaissant le temps écoulé et la résolution de l'encodeur, je peux en déduire la vitesse réelle et calculer le ratio par rapport à la vitesse théorique ciblée.
il y a une heure, Pascal C03 a dit :Sinon une mémorisation pec intègre toute la chaine cinématique... Tu veux asservir l'amont de la VSF pour ne laisser au pec classique que l'effet de la VSF sur la roue... Pourquoi pas, tu dois gagner un µpouillème peut-être...
A ceci près qu'une mémorisation PEC classique ne permet pas d'intégrer correctement les sous périodes non multiples de la vis sans fin. Hors c'est typiquement ce que je rencontre avec l'EM-10 entre la démultiplication du moteur 1/500 sur six étages...

Et les deux engrenages de transmission qui apportent encore un ratio de 45/36 soir 1,25...

Au final, le pouième en question représente près de 30% de lEP dans mon cas donc ça vaut le coup de tester.
-
1
-
-
Merci Vincent.
Et dans la série "encore une idée à la con", voici ma dernière réalisation en impression 3D: support d'encodeur sur mesure pour l'axe R.A de mon EM-10 Taka...
")
Le sushi c'est que rien n'est droit sur cette monture! Qu'à cela ne tienne: passage ne mode "haute couture"... Lol
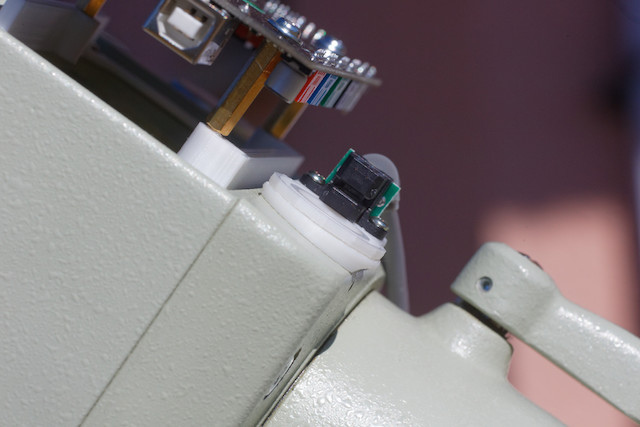

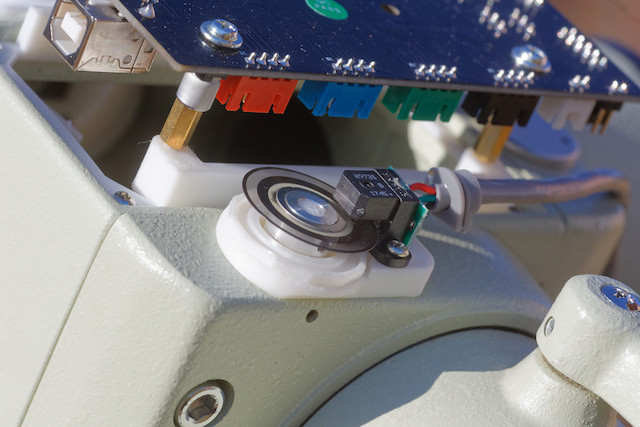
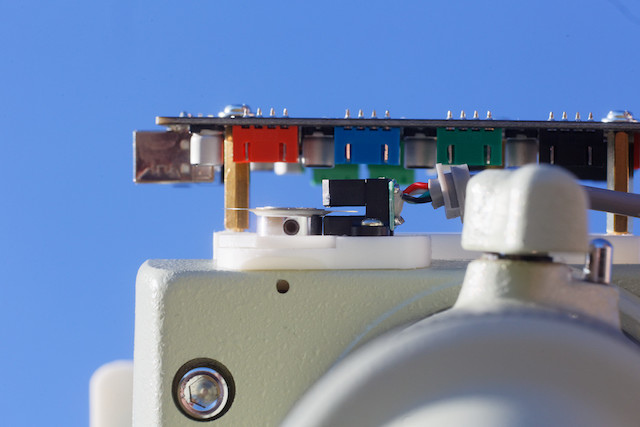
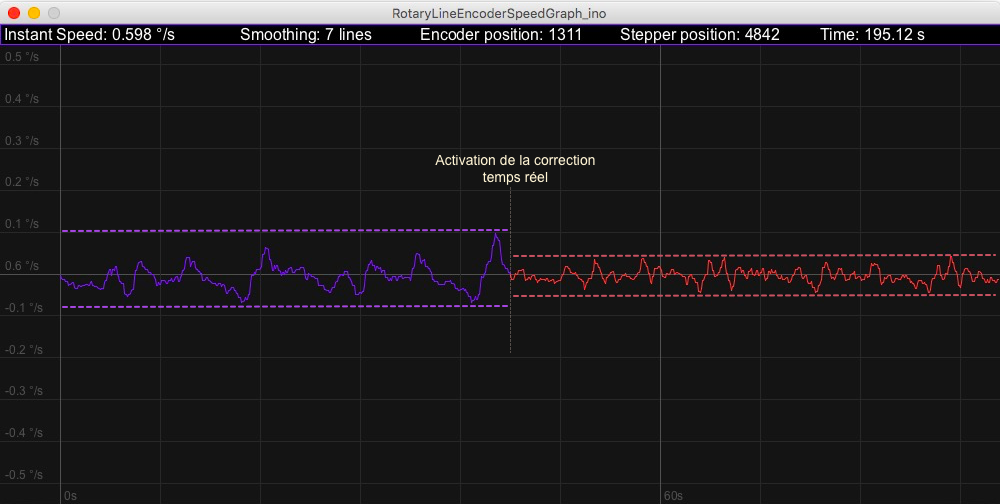
Là où cela devient intéressant c'est que mon idée est d'essayer d'utiliser l'encodeur pour asservir la vitesse (et non la position) et, si cela marche, compenser les erreurs périodiques en amont de la vis sans fin (démultiplication du moteur et les deux engrenages de transmission). Cela permettrait de mettre au point un PEC double étage mêlant l'asservissement de vitesse en cascade avec une mémorisation PEC classique pour la vis sans fin. Vous me suivez?
J'ai commencé à travailler sur l'asservissement. C'est un premier jet mais j'ai déjà une réduction de l'ordre de 40 à 50% de l'amplitude de la vitesse. Cela devrait être suffisant pour un test sur le ciel afin de mesurer l'impact sur l'EP...
-
il y a une heure, jldauvergne a dit :Ca se bouffe vite quand même en faisant du planétaire.
J'ai très rarement changé la mienne. La pile 9v était peut être fatiguée.
-
il y a une heure, messier63 a dit :Mala05, tu vis dans les hautes Alpes? ;-)
Yep. Je vis depuis quelques années à Gap. Un Breton expatrié...
-
1
-
-
Ma raquette de mise au point semble identique par contre. Avec le potard de réglage je la trouve assez agréable à l'usage. Pas de soucis pour une mise au point fine.
-
1
-
-
On dirait que le Mewlon 250 a subit quelques évolutions chez Taka au fil du temps. En regardant tes photos, je note que le support secondaire est différent du miens (fin 1993)...

-
Bienvenu dans le club µ250!

-
1
-
-
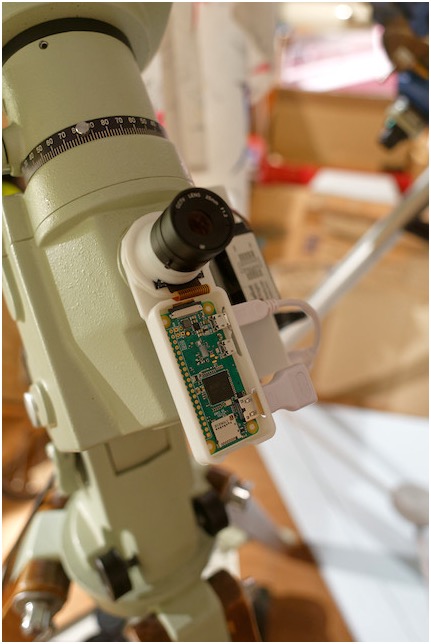
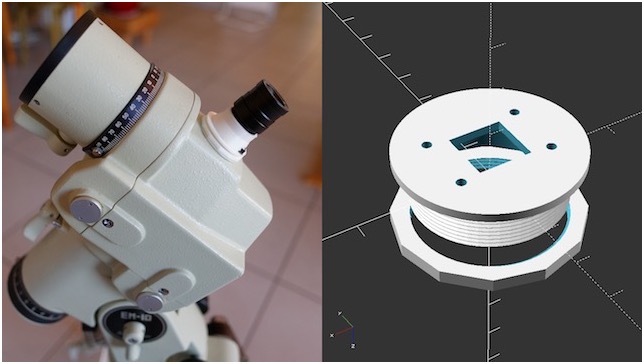
Dernière avancée en date qui est en fait un projet à lui tout seul: je réfléchis depuis un moment au remplacement du viseur polaire optique d'origine, dont la gravure a expiré en 2015, par un viseur polaire numérique sur mesure.
Mon idée est d'intégrer un Raspberry Zero avec caméra et objectif dans le corps de la monture pour disposer d'un viseur polaire numérique. Je vous présente donc le premier proto (externe pour l'instant) destiné à valider la faisabilité...


L'intérêt est multiple:
- remplacer donc l'ancien viseur polaire "périmé" de l'EM-10 (même si il est exploitable encore quelques années en débordant un peu du repère).
- libérer l'axe optique interne va me permettre de remplacer les moteurs d'origine par des plus récents et plus puissants (donc plus gros).
- ne plus devoir se mettre à quatre pattes pour la MES.
- améliorer encore la précision de mise en station.
- le raspberry pourrait devenir un accès wifi dialoguant avec la carte Arduino.
J'ai bien avancé pendant les vacances sur le codage. Je pilote la caméra PI avec une version revisitée par mes soins de Raspistill...
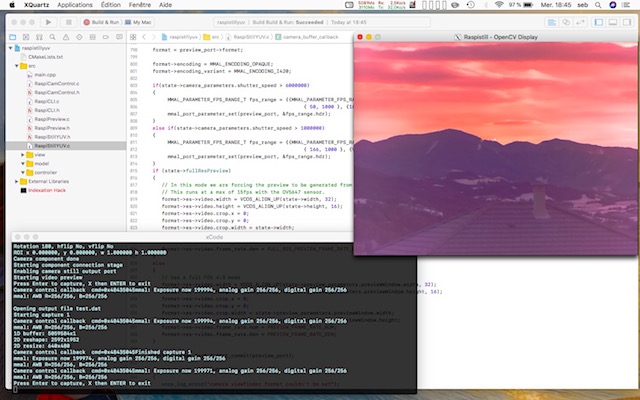
Je détecte les étoiles du champ photographique (magnitude>7 en 2s de pose) ...

et j'ai dernièrement développé une mini base de données des étoiles autour du pôle jusqu'à magnitude 7...
Pour un précision optimale, j’ai pris en compte au niveau des étoiles: leur dérive annuelle, la précession des équinoxes, la nutation et l'aberration annuelle.
Question budget, je pense que je vais susciter des vocations pour des clones si j'aboutis. J'en suis à 40€ à peine d'électronique...

Il faut encore que je travaille sur la corrélation de champ entre images et base de donnée et je pense que j'aurais toutes les pièces du puzzle pour la conception d'un viseur polaire en réalité augmentée.
-
6
-
2
-
1
-
-
Si une phase est inversée par rapport à l'autre il va simplement brouter et ne pas avancer. Tu seras vite fixé.
-
Si tu as 4 fils sur le connecteur de sortie c'est que ton unipolaire est câblé en bipolaire. Le commun n'est pas utilisé et donc les 4 bobines sont appairée par deux.
Donc s'il marche parfaitement à l'envers (pas de saccades) , de mémoire il suffit juste de permuter la nappe (ton premier choix):
Jaune
Rouge
Orange
Brun
-
Comme me disait ma femme: y a rien de mieux que la vaseline pour que ça glisse!
Ok, je sors...

-
 3
3
-
-
Il y a 10 heures, STARBIRD a dit :donc forcement sur la vitesse des composants donc la cadence donc l'heure et le suivi sidéral qui dépends de l'heure exacte et par conséquent sur la position calculée des étoiles !
Les PCs sont cadencés par des quartzs qui ont la propriété d'être très stables aux variations de températures. Nul besoin de mettre à jour l'horloge toutes les heures.
-
Le développement de la raquette de commande avance...
Le format paysage me contraint à revoir complètement l'interface de navigation que j'avais imaginé pour l'écran de l'ancien prototype mais cela devrait être d'autant plus confortable à l'usage.
-
2
-
1
-
-
Il y a 2 heures, DBlatte a dit :En fait j'ai aussi utilisé Guitaretuna mais il ne reconnait pas la note !
Les notes de solfège ne représentent pas toutes les fréquences. Qui plus est, GuitarTuna se cale automatiquement sur la fréquence des cordes de guitare classique (Mi, La, Ré, Sol, Si, mi). En achat InApp, il propose d'autres accordages mais là n'est pas le débat.
Il faut plutôt regarder du côté des applis "analyseur de spectre". Elles permettent de visualiser tout le spectre de fréquences issue de la transformée de fourrier du son enregistré par le micro.
-
1
-
-
Il y a 6 heures, DBlatte a dit :je vous dirai quelle note j'obtiens ... (un la 440 ou un 415 ?).
Avec une EQ je mise sur un La baroque.

-
Pour donner un ordre de grandeur, sur une EM-200b de 25 ans que j'ai testé récemment avec mise en station au viseur polaire d'origine, je suis à 2'' de dérive par période de vis tangente (8min). A noter qu'après contrôle le viseur polaire est légèrement désaxé. Je ne serais pas surpris de tomber en dessous de la seconde d'arc après réglage fin.
-
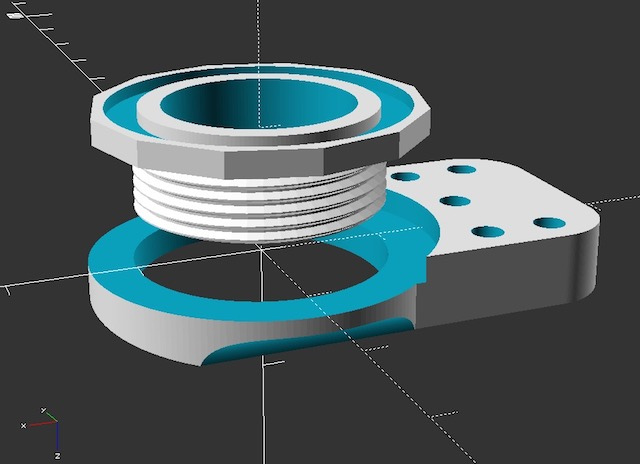
Adaptation de la caméra Raspberry PI avec son objectif CS sur l'EM-10 pour le développement logiciel. Dans un premier temps, optique et Raspberry vont être placés en extérieur. Comme ça je pourrais monter/démonter le système sans condamner le viseur polaire d'origine le temps du développement. Il me reste à faire le support du Raspberry mais l'adaptateur est ok avec fixation par pas vissant et contre écrou. Simple mais efficace et assez robuste...
-
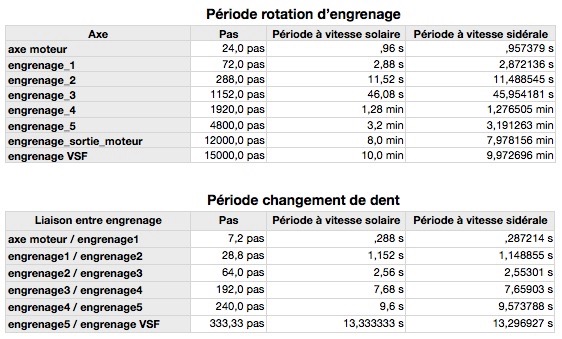
Oui deux pignons de 40 dents sur l'EM-200 Pascal. Soit 480/40=12 secondes par dent avec une période de rotation moteur de 8 min. Sur l'EM-10 c'est deux pignons de 36 et 45 dents ce qui donne une démultiplication supplémentaire de 1.25x et amène la vis sans fin à 10 min de période de rotation.
Encore un gadget ?
dans Astronomie pratique
Posté(e)
Le problème n'est pas tant logiciel que physique. Un viseur polaire numérique nécessite de contenir dans le même champ l'axe polaire céleste, l'axe polaire de la monture et le tout avec assez de champ pour identifier les étoiles environnantes. Et tout cela doit pouvoir pivoter sur l'axe RA de manière à bien calibrer l'axe de la monture par rapport à l'image de la caméra. Une camera quasi dans l'axe avec un petit objectif donnant un champ de plus de 6° est donc l'idéal.