|
|
|
Space Communications with Mars
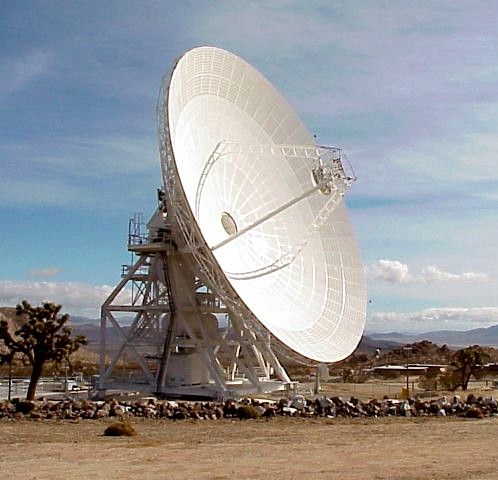
The Deep Space Network (II) NASA's Deep Space Network, aka DSN, is an international telecommunication network initiated in 1987. The first antenna, Deep Space Station 13 (DSS-13), was constructed between 1988 and 1989. It saw its "first light" in early 1990. The DSN consists of large antennas equipped with cryogenically cooled low-noise amplifiers (approx. 20 K noise temperature) that ensure communications between JPL and other scientist laboratories as well as with Mars Exploration spacecrafts placed on orbit or that landed on its surface. This network is of course used to contact most other spacecrafts from Ulysse to New Horizons. To permit constant control of spacecrafts while the Earth rotates on its own axis, the DSN use three deep-space communications facilities placed approximately 120° apart around the world : the first antenna is located at Goldstone, in California's Mojave Desert; the second one near Madrid, Spain; and the last one near Canberra, Australia. Today about ten dishes are erected in the California's Mojave Desert. The DSN antennas are similar to radiotelescope dishes : DSS-13 is 34 m (111.5 ft) and DSS-14 is 70 m (229.7 ft) in diameter[1]. These sizes are necessary to communicate with spacecrafts located hundreds of millions km from Earth and which signals are very weak; the larger the antenna, the stronger the signal and greater the amount of information the antenna can send and receive. On their side each spacecraft, whether it is an orbiter or a lander, carries several antennas used for different phases of the mission and that permit it to communicate in different directions and with other spacecrafts at different transmission rates. To see : Images from Goldstone Antenna capabilities Thanks to the beam waveguide (BWG) technology implemented on DSS-13 in 1998 and DSS-14 in 2003 and the use of low loss interfaces (preamplifiers, amplifiers, receivers and filters), the DSN has pushed up in frequency and is today capable to operate on several microwaves bands, allowing together VLBI operations, precision spacecraft pointings and the transfert of large data volumes (several MB/sec on Ka-band). DSS operate on next bands : - S-/X-band at 2.3/8 GHz : dual-frequency Very Long Baseline Interferometry (VLBI) receiver, selectable right or left circular polarization (RCP or LCP). - DSN X-band at 8 GHz : standard DSN receiver in single polarization (RCP). Same uplink and downling frequencies as previous. - X-band at 13.8 GHz : mainly used for the Cassini-Jupiter Microwave Observing Campaign (JMOC), it matched in frequency to the Cassini radar instrument onboard Cassini-Huygens spacecraft - K-band at 22 GHz : monopulse radar, single polarization RPC with integrated monopulse tracking coupler for closed-loop, precision spacecraft pointing - Ka-band at 32 GHz : broadband low-noise receiver - Ka-band at 34 GHz : Zeeman maser receiver using liquid helium-cooled maser, simultaneous dual polarization RCP/LCP. - Q-band at 43 GHz : research and development receiver, cryogenically cooled high-electron-mobility (field-effect) transistor (HEMT), simultaneous dual polarization (RCP/LCP) - W-band at 90 GHz : this receiver is under development for future space VLBI (e.g. ARISE) and ground-bases radio astronomical osbervations DSS-13 maintains a modest transmit capability for uplink, 20 kW at X-band and 80W at Ka-band at 34 GHz. Intermediate frequency (IF) are routed via the antenna pedestal via a 16x4 channel IF matrix switch and transmitted to the control room over optical fibers. These signals are then distributed to a number of back-end processors : - Precision, two-channel radiometer - Dull-spectrum recorder (FSR) - Radar downconverter - Wide-Band Spectrum Analyzer (WBSA) - VLBI Mk IV data acquisition terminal (MkIV DAT) completed with a real-time correlator. Is this frequency in use ? Like in amateur radio activities where it happens that the frequency you want to use is busy by another ham, space communications channels are also intensively used. The DSN communicates with nearly all spacecrafts exploring the solar system. Currently more than ten spacecrafts are cruising in space, observing planets, the Sun, asteroids, and comets.
DSN antennas are thus extremely busy trying to track all of these space missions at the same time. Therefore each spacecraft works in time sharing on the DSN antennas, each of them receiving a predefined timeslot to communicate with Earth and vice versa. A sophisticated scheduling system with a team of hundreds of negotiators around the world ensures that each mission's priorities are met. This system shown its performances and its efficiency late 2003 and early 2004. Indeed, at that time the DSN resources were extremely busy. Practically at the same time, the U.S.A. (Mars Odyssey), Europe (Mars Express), and Japan (Nozomi, but defective) arrived at Mars, two other spaceprobes encountered comets (Deep Impact and Stardust), and a third spaceprobe (Rosetta) was launched to the comet Churyumov-Gerasimenko. Several other missions, including Cassini was visiting Saturn, requesting continue telecom needs as well. During critical mission events, such as landing on Mars, multiple antennas on Earth and the MGS orbiter track the signals from the maneuvring spacecraft to minimize risk of loss of communication. During the landing operations phase on the Martian surface, the Mars Exploration Rovers use the Multiple Spacecraft Per Aperture (MSPA) capability of the DSN, which allows a single DSN antenna to receive downlink from up to two spacecrafts simultaneously.
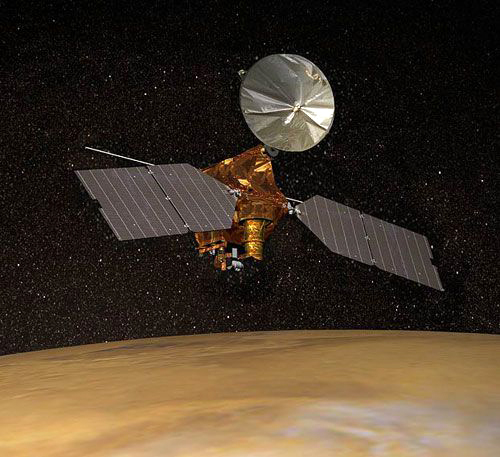
A martian rover like Opportunity can use four different antennas : an UHF antenna or a low-, medium-, or high-gain antenna. This capability gives the mission team several different ways to send directly commands to rovers without relaying via the orbiter and to return data back to Earth. The rovers' downlink sessions (when rovers send information back to Earth) is generally limited to a couple of hours at a stretch, with a maximum of two downlink sessions per Martian day (sol) per rover. The MSPA technique allows only one spacecraft at a time to have the uplink and the rovers command early in each sol for roughly an hour each to provide instructions to execute during the day. Tracking the spacecraft cruise During cruise, DSN's antennas must "pick up" signals from the spacecraft so that navigators know its current position. The spacecraft being no visible visually, even using a telescope, engineers rely on radio "tracking" to locate the spacecraft at any given time. In practice the DSN's team listens for signals from outer space, and, using a digital signal processing software (DSP) he tries to detect where the sound comes from and thus to locate the spacecraft. This navigation service is called "tracking coverage" and takes into account the Doppler effect, ranging and delta differential one-way ranging, or "Delta DOR". Doppler effect The Doppler effect affects the electromagnetic field, light or radio waves, emitted by a body moving relative to an observer. The emitting signal changes of frequency as it moves towards or away from the observer or the antenna. Here are two typical examples of Doppler effect on the sound of a F-16 jet flying at low level and Indy cars at full speed. The size of the Doppler shift depends on how fast the emitting source is moving relative to the observer. If the signal from the spacecraft comes towards the antenna the wavefront is compressed in this direction and thus shifted to the higher frequencies, shorter wavelengths, or blueshifted by comparison to a lines spectrum. Conversely, if the spacecraft moves away, the signal is shifted towards the lower frequencies; we observe a redshift.
Ground controllers that ensure communications with rovers know the frequency of the signal at rest that is transmitted by the spacecraft. But since the spacecraft is moving into space this frequency is being Doppler shifted a bit lower or higher in frequency. Knowing the speed of electromagnetic waves, a straightforward calculation allows to find the velocity of the spacecraft. Ranging Ranging allows to know the distance to the spacecraft with accuracy. Engineers send a code to the spacecraft, that immediately send it back using its own antenna to Earth. The delay between sending and receiving the code, minus the delay in turning the signal around on the spacecraft, is twice the light time to the spacecraft. So, in dividing by two and multiplied by the speed of light we can calculate the distance from the DSN station to the spacecraft. This distance is accurate to about 5-10 m (16-33 feet), even though the spacecraft may be 200 millions km away ! With the spacecraft Voyager 2, at the level of Pluto's orbit located at that time at 4.5 billions km away, engineers calculated its path with an on site accuracy of 30 km, a punctuality of 10 minutes and the heading of its antenna was accurate within 0.05° ! Delta DOR Delta DOR (Differential One-way Ranging), is similar to ranging, but it also takes in a third signal from a naturally occurring radio source in space, such as a quasar (a strong extragalactical radio source), and this additional source helps scientists and engineers gain a more accurate location of the spacecraft. Although quasars are located a few millions or billion light years away, since 1979 their position has been accurately determinated thanks to VLBI observations. Note that the optical positions from the astrometric Hipparcos satellite are also dependent on these radio positions. The actual catalogue positions for delta DOR by the DSN are produced by JPL and are consistent with the International Celestial Reference Frame (ICRF). Delta DOR provides a calibration means for the same measurements made within a few tens of minutes of each other on the spacecraft. Substracting measures from the spacecraft ranging from the quasar delta DOR measurements, we cancel a lot of errors that are the same in both measurements induced by the atmosphere and the equipment. The "ranging" works in fact in measuring the difference in the distance to the source between two complexes on Earth (for example, Goldstone and Madrid or Goldstone and Canberra). From that an angle in the sky can be determined relative to the stations. The angle for the quasar is substracted from the angle of the spacecraft, giving the angular separation of the quasar and the spacecraft. That angle is accurate to about five to ten nanoradians (1 radian = 180°/π or approximately 57.29578°), which means when the spacecraft is near Mars, say 200 millions km away, it can determine the position of the spacecraft to within 1 km (0.6 miles). Special tones during entry, descent, and landing During the phases of entry, descent, and landing (EDL), the Mars Odyssey spacecraft like all others encounter turbulent conditions. Navigators must safely maneuver Spirit and Opportunity to their precise atmospheric entry points to reach their landing targets on the surface of Mars.
In only six minutes, the spacecraft must slow down from an incredible speed of 5.3 km/s or 19600 km/h to nearly zero, thus six times faster than the space shuttle. During these few minutes, the spacecraft experiences intense heating from friction caused by speeding into the atmosphere; it jostlses when the parachute deploy; and the lander and rover bounce along the surface in the airbags before they come to a rest on the Martian surface. The quick and intense movements caused by entry and landing make it difficult to accurately track the spacecraft during this phase, so the communications leads have set up a series of basic, special individual radio tones that will ring during different phases of the entry, descent, and landing process. In order for the engineers to know if the parachute deployed for example, a tone of a certain pitch will sound in the control room. Yet a different tone will ring when the airbags deploy. Engineers on Earth will track the EDL process by listening for 128 distinct tones (out of 256), all of which have individual meanings throughout the EDL process. Last chapter Response time and interferences
|