
CPI-Z
-
Compteur de contenus
1 534 -
Inscription
-
Dernière visite
-
Last Connexion
Soon available - 47738
Tout ce qui a été posté par CPI-Z
-
Est ce que l'on perd en résolution avec une matrice de bayer ?
CPI-Z a répondu à un sujet de jldauvergne dans Astronomie pratique
Non, moi j'ai toujours traité chaque couleur séparément pour obtenir les meilleurs résultats finaux. -
Est ce que l'on perd en résolution avec une matrice de bayer ?
CPI-Z a répondu à un sujet de jldauvergne dans Astronomie pratique
Pas du tout. Je crois que l'on sait mal compris. La fonction split_CFA sépare purement les images brutes RAW en fichiers indépendants . Cela n'empêche en rien les post-traitement flat, bruit alignement ... avec tes outils favoris dont AS3. -
Est ce que l'on perd en résolution avec une matrice de bayer ?
CPI-Z a répondu à un sujet de jldauvergne dans Astronomie pratique
C'est exactement ce que j'allais proposer à Jean-Luc avec IRIS > split_cfa [c1] [c2] [c3] [c4] ou split_cfa2 [entrée] [a] [c] [d] [nombre] pour une série [a] étant l'image qu'avec les pixels rouges, [d] qu'avec les pixels bleus, [c] avec les pixels verts. Cela implique des traitements indépendants des séries rouge et bleu. Pour le vert je pense qu'il est préférable d'utiliser la série verte extraite d'un dématriçage car je ne vois pas comment reconstituer l'image verte à partir des 2 fichiers [c]. La reconstitution se fait avec > merge_cfa [c1] [c2] [c3] [c4] ou > merge_cfa2 [a] [c] [d] [sortie] [nombre] pour une série. Là au moins il n'y aurais pas d'approximation pour le rouge et bleu. Dans ce cas on retrouve bien la conversion de l'échantillonnage entre la couleur et le NB comme je l'avais expliqué -
Est ce que l'on perd en résolution avec une matrice de bayer ?
CPI-Z a répondu à un sujet de jldauvergne dans Astronomie pratique
JLD je crois que tu peux trouvé la réponse tout seul, il te suffit de traiter une de tes vidéos couleur avec ta méthode de de-bayer classique et le refaire avec le bayer drizzle. Au final tu devrais nous annoncer s'il y a vraiment un plus. -
Est ce que l'on perd en résolution avec une matrice de bayer ?
CPI-Z a répondu à un sujet de jldauvergne dans Astronomie pratique
Si je puis emmètre mon avis sur le sujet : L'échantillonnage à l'acquisition est la base du problème, il faut que l'information de la PSF soit dans l'image résultante sans trop sur-échantillonner. Je ne connaissais pas le bayer-drizzle, j'ai donc regardé et effectivement c'est un plus en visuel sur l'image résultante en CP, les étoiles ont un bord plus propre en trichromie (elle sont plus "blanche" jusqu'au bord). Mais les lois de l'optique montre que le diamètre de la PSF est proportionnel à la longueur d'onde. Donc il est logique que le rouge déborde du disque vert ou jaune et le bleu à l'intérieur. Ce n'est donc pas une aberration chromatique, pour moi au contraire c'est le garant d'une bonne image HR couleur. Le bayer-drizzle supprime ce phénomène. Ce type de traitement dénaturerait l'image en HR planétaire ? C'est une question que légitiment on peut se poser. La caméra NB avec 3 séquences avec filtres RVB multiplie par 3 le temps total d'exposition. Hors on est limité par la rotation de la planète même avec une dérotation avec WinJPOS. Reste le prisme des tri-CCD avec 3 caméras simultanées. Le prix et l'informatique doivent suivre ... Dans tous les cas la PSF rouge reste plus grande que pour les autres couleurs et la bleu reste la plus petite. Pour une caméra couleur on peut dire que les pixels rouge ou bleu sont de 1 sur 4, soit 25% par rapport à une caméra NB. Pour une QHY 5L-II c entre le vert et le bleu il y a un rapport de longueur d'onde 460/550 = 0.83. Si K = 5 pour le NB on obtient un équivalent de K = 5*0.83*25% = 1.04 Pour le rouge on passe à 610/550 = 1.11, K devient 5*1.11*25% = 1.13 Pour le vert K devient 5*1*50% = 2.5 Ce type de calcul donne l'échantillonnage réel par rapport à un échantillonnage NB du tableau K. On peut trouver le bon échantillonnage pour qu'une caméra couleur corresponde à l'échantillonnage NB choisi, donc son équivalent en résolution. Il reste toujours les limites du nombre d'images/s fonction du rapport signal/bruit et intensité objet/sensibilité caméra au travers du télescope. Après au final après les post traitements, si l'image avec la caméra couleur semble trop grande (comme floue), il reste toujours la possibilité de la réduire par division géométrique (ou bining) pour lui attribuer une résolution proche du pixels améliorant seulement la restitution visuelle et sans ce que certains appellent les aberrations chromatiques, l'essentiel c'est que l'information HR soit dans le cumul des images et restituée au final tout en correspondant au limites du télescope. PS mon meilleur résultat obtenu en de-bayerisation est l’algorithme IVG de RawTherapee . Mais je ne sais pas à quoi il correspond. -
Est ce que l'on perd en résolution avec une matrice de bayer ?
CPI-Z a répondu à un sujet de jldauvergne dans Astronomie pratique
Oui on peut résumé en disant que la figure de diffraction d'un télescope, la PSF est un artefact, c'est la TF du dirac au travers de ouverture limitée du télescope. Et pour STF8LZOS6 le bon échantillonnage, le = dans la figure, correspond bien à un étalement entre 4 et 5 pixels entre le centre et le premier anneau sombre. 4 < K < 5 -
Est ce que l'on perd en résolution avec une matrice de bayer ?
CPI-Z a répondu à un sujet de jldauvergne dans Astronomie pratique
Alors le fameux "filtre passe bas en sortie, comme en entré" nécessaire, n'est pas dans la chaîne d'acquisition d'image HR planétaire, (télescope , barlow et caméra) et le dilemme caméra couleur ou NB ainsi que la problématique de l'échantillonnage optimal correspondant. On serait dans le post-traitement numérique. Si c'est le dirac que vous cherchiez, il y a la déconvolution de la PSF par la PSF en post traitement. Mais cette solution a aussi ses limites en pratique. Pour moi la simulation de l'échantillonnage en image reste valable au niveau de l'acquisition, sauf si on m'explique le contraire. -
Est ce que l'on perd en résolution avec une matrice de bayer ?
CPI-Z a répondu à un sujet de jldauvergne dans Astronomie pratique
Désolé j'ai mes limites et je ne comprends pas. Entre un télescope , une barlow, et une vidéo caméra vous parlez de quoi ? Ce serait quoi "le filtre passe bas en sortie, comme en entrée" ? -
Est ce que l'on perd en résolution avec une matrice de bayer ?
CPI-Z a répondu à un sujet de jldauvergne dans Astronomie pratique
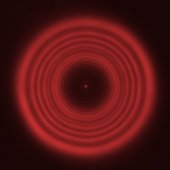
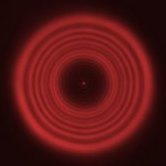
Je ne vois pas en quoi la représentation de l'échantillonnage en image que j'ai représenté par simulation ne serait pas représentatif d'une réalité. Tout à chacun a pu observé la figure de diffraction d'une source ponctuelle ou d'une étoile dans un télescope digne de ce nom quand les conditions atmosphérique le permet. Et chacun comprend que chaque pixel d'une caméra ne peut restituer qu'une intensité à la foi par image, et donc les pixels découpent la figure de diffraction de la source en marche d'escalier d'intensité différente. C'est cela et seulement cela l'échantillonnage. Après le choix de l'échantillonnage dépend du K évoqué avec F/D = K*p / (1.22 onde). Pour prouver mes dires et non du bla bla avec formules sortie d'un chapeau magique comme certain le laisse penser, voici une image d'une étoile double, compilation d'une vidéo faite avec un télescope loin d'être parfait et une simple caméra couleur QHY 5L-II c. On observe bien que le diamètre du premier anneau sombre de la figure de diffraction (PSF) est proportionnel à la couleur, la longueur d'onde correspondant au filtre de Bayer pour chaque couleur. -
Pour un oculaire de microscopie ou une loupe, entre le grossissement et la focale, la formule est normalisée par rapport à la distance de 0.25m (25cm) G = 0.25 / focale ou F = 0.25 / G donc si G = 10x alors F = 0.25 / 10 = 0.025 m soit 25 mm. Je confirme également les 25 mm pour un oculaire ou une loupe 10x.
-
Est ce que l'on perd en résolution avec une matrice de bayer ?
CPI-Z a répondu à un sujet de jldauvergne dans Astronomie pratique
Pour moi le Monsieur de la vidéo présente 3 facteurs indépendants dans son choix Couleur ou Mono : l’échantillonnage, la sensibilité d'un capteur et le post traitement par ondelettes. - le traitement par ondelette Si on dispose d'une image parfaite, au pixel près (k = 1 voir ci-dessous), le post traitement par ondelettes n'apporte rien (ou éventuellement du contraste) mais pas de gain de résolution. Ce gain peut apparaitre que s'il y a sur-échantillonnage, si l'information se dessine sur plusieurs pixels consécutifs. - La sensibilité d'un capteur Mono est supérieure à celle capteur couleur avec matrice de bayer. Mais si l'on met un filtre couleur devant la Mono la sensibilité diminue de manière comparable à celle de la caméra couleur. Cela n'enlève rien à l'utilité du LRVB en CP. Mais en planétaire le temps cumulé étant limité avec le maximum d'images pour retenir que les meilleures, la caméra couleur a son avantage. - et enfin sur l’échantillonnage. Il préconise la formule F/D = 3.438*p avec p = pixel (P = 3.75 micron dans l'exemple et la formule donne un F/D = 12,9). Voici une simulation d'étoile fonction d’échantillonnages 1ére ligne étoile centrée sur un pixel 2ième ligne étoile à cheval sur pixels ce qui est le cas le plus fréquent. On voit bien que la figure de diffraction au travers de l'instrument n'est correcte qu'avec un K (K nombre de pixels entre le centre et le premier anneau sombre) compris entre 4 et 5 (4 < K < 5) Si K = 6 ou supérieur à 6 l'image est parfaite (après c'est une question d'intensité et du rapport signal/bruit). La résolution d'un télescope r = 1.22*onde/D Au foyer cela représente un longueur d = F*r (r angle en rd très petit devant F) ou d = (F/D) 1.22 onde Pour un K choisi d = K*p = (F/D) 1.22 onde ou F/D = K*p / (1.22 onde) Si l'on choisi un K entre 4 et 5 par exemple 4,5 alors F/D = 4,5 * 3,75 / (1.22*onde) et avec 550nm (0,55 micron) comme longueur d'onde F/D = 25 F/D = 25 est très loin des 12.9 préconisé. Un F/D = 12,9 correspond à un K de 2,3 sur l'image d'échantillonnages. Je vous laisse apprécier l'insuffisance dans la 2 ième ligne (et même s'il y avait traitement ondelettes après). Pour moi, c'est JLD qui a raison sur l'échantillonnage correct (et ses images le prouve). Un échantillonnage insuffisance ne restitue pas ce qu'un télescope à dans le ventre, que la caméra soit mono ou couleur. Après il faut choisir son échantillonnage donc son K, fonction de son instrument et de sa caméra pour maximaliser ses images planétaires. -
DiamEater.zip Utile lors des acquisitions (c'est moi qui avait trouvé DiamEater à l'époque et donner le lien sur Astrosurf) Attention: quand je parle de mesurer le diamètre, c'est avec WR, la valeur prise en compte dans WR pour le calcule du dF lors des Paramètres.
-
Oui ça fait petit, et trop petit cela réduit la sensibilité des défauts mesurables par WR. Mais si la source est faible et la caméra pas assez sensible cela peut servir. Pour des images réellement bin x1, rentrer un bin x2 dans WR c'est juste comme si les pixels étaient 2x plus gros, le dF calculé est alors 2x plus grand et donc les résultats 2x moins bons. N nombre d'onde le mini c'est 15, 25 c'est mieux et 50 c'est difficile de par les faibles intensités au niveau de la caméra. Tout dépend du F/D, de la source et de la caméra. Oui pas facile voir impossible. L'essentiel c'est que le dF calculé dans WR soit au-moins égal au dF mesuré, et donc que le rayon des images mesurés dans WR ne soit pas réduit par un seuil de visualisation trop haut. Sinon WR est bien trop optimiste.
-
Bernard, ici aussi dans le LOT il pleut encore ... Super ta correspondance du rayon intra et extra. Reste à vérifier si le defocus réel correspond à celui calculé par WR (10.165mm dans ta capture d'écran). S'il y a différence il faut jouer sur les seuils images, cela modifie le rayon mesuré dans WR pour que le defocus calculé par WR corresponde (supérieur ou égal) au defocus réellement mesuré. Sinon WR sera trop optimiste sur ses résultats.
-
Cela se fait sur écran avec un soft par exemple avec WR qui a directement son outil de mesure d'image.
-
Dans l'exemple de JLD entre 4,283mm et 4,635mm de defocus donc avec une différence de 0.35mm sur sa mesure réelle, cela induit déjà une variation de 30% sur les résultat PTV et le RMS de WR (10% sur le Strehl). Donc mesuré le defocus réel dans ce cas avec une précision de + ou - 0.1mm (voir + ou - 0.2mm) n'ajoutera rien à la précision de mesure. Ces résultats de WR resterons indicatifs avec un pied à coulisse classique. PS : c'est lyl qui proposait un pied à coulisse. Translater un primaire avec un secondaire non plan, c'est aussi une erreur optique pour un test WR. Idem pour un MAK. il ne reste que la solution d'adjoindre un système focuser avec un outil de mesure de defocus suffisamment précis : exemples : un système de bagues mesurées différentes, focuser équipé d'un comparateur, focuser motorisé pas à pas, ou d'autres solutions mécaniques équivalentes ... seule la caméra (+filtre) doit se déplacer. CPI-Z
-
Comprends toujours pas tes propos. Tu veux dire quoi ?
-
Tu parle de quoi là STP ?
-
Si avec WinRoddier on ne veut pas que de l'indicatif, il faut au minimum être précis sur les données d'entrée : le rapport F/D de l'optique, la longueur d'onde, dF defocus, et la symétrie des images sur l'axe. Dans l'exemple de JLD les images sont bonnes et symétriques. On le voit dans le résultat par des valeurs Zernike faibles en défocalisation et en inclinaisons. Le choix de la longueur d'onde d'acquisition est déjà plus difficile compte tenu de la large réponse spectrale de la caméra ASI290MM sans filtre. Comme le sommet est autour de 590nm j'ai choisi cette valeur. Le point oublié est l’absence de la mesure du defocus réel et avec précision. Dans le premier cas on est à 4,283mm calculé par WR et dans le second à 4,635mm. Il en découle un PTV ou RMS qui varient de 30% et 8% sur Strehl. Un pied à coulisse à + - 0.1mm ou à + - 0.2mm me semble insuffisant, dans l'exemple on n'a que 0.35mm de différence
-
Dall-Kirkham vs Maksutov-Cassegrain - HR planétaire
CPI-Z a répondu à un sujet de Olivier Meeckers dans Astronomie pratique
Si les 2 télescopes sont de même qualité, le différence en viendra du diamètre de l'obstruction (la plus petite étant la meilleure), et à obstruction égale, l’araignée du Dall-Kirkham qui doit gêner un peu. -
Sans soft dédié il y a aussi la lunette auto-collimatrice, mais il faut pouvoir en disposer
-
Donc effectivement c'est blizzard
-
Le pb ne viendrait-il pas tout simple par l'échelle d'angle (donc non exprimée en °)
-
OK chonum, mais comme il y a 3 possibilités de simulation et que AISvart n'a pas défini de contexte il fallait bien en choisir une. Et dans ce cas (BF pour chaque position) est celle qui donne les meilleures valeurs, les autres donnent forcément des valeurs inférieures de strehl. PS il y a aussi les correcteurs de coma et/ou aplanisseur qui change tout ...
-
La principale différence vient du choix, best-focus par angle ou dans le plan du foyer ou encore dans le meilleur plan de la plage choisie. Dans le graphe c'est le best-focus pour chaque angle.
