|
|
|
Le système GPS
Fonctionnement du système GPS (II) Avant d'examiner le marché des GPS grand public, introdusons quelques éléments de théorie afin de mieux comprendre son fonctionnement. 1. Généralités Le système GPS s’articule autour de trois segments : - Le segment spatial - Le segment de contrôle - Le segment utilisateur. Le segment spatial est constitué d’un constellation de satellites NAVSTAR (Navigation Satellite Timing And Ranging). Ces satellites évoluent sur 6 plans orbitaux différents ayant une inclinaison d'environ 55° sur l'équateur. Ils gravitent sur une orbite polaire quasi circulaire à une altitude de 20300 ±200 km qu'ils bouclent en 11 heures 58 minutes à la vitesse de 13000 km/h. Chaque satellite dispose de fusées auxiliaires afin que les contrôleurs au sol puissent éventuellement corriger son orbite. Le satellite est alimenté en courant électrique grâce à des panneaux solaires. Il utilise des batteries rechargeables lorsqu'il passe dans l'ombre de la Terre. La durée de vie de ces satellites est d’environ 8.5 ans. Ils sont remplacés à mesure qu’évolue la technologie. Actuellement la constellation GPS se compose de 30 satellites dont 4 de réserve appartenant à quatre générations différentes : le Bloc II (1980-89), le Bloc IIA (1990-97), le Bloc IIR (dont voici le modèle 2R-11 auquel les ingénieurs ont fixé une dédicace du Dr Ivan A.Getting). Au total, 12 satellites ont été modernisés au sein du Bloc IIR-M (1997-2003) et le Bloc IIF (depuis 2005). Les satellites du Bloc II ont été mis sur orbite par une fusée Delta II. Conçue à l'origine pour servir de missile balistique THOR, sa fabrication fut arrêtée en 1984. Mais suite à la suspension des vols des navettes spatiales en 1986 après l'accident de Challenger, ce lanceur a repris du service. En 2013 soit trois ans après la date initialement prévue, le système GPS III sera lancé et devrait être opérationnel jusqu'en 2030. Sa résolution maximale sera de l'ordre de 1 à 5 m, avec ou sans "disponibilité sélective" ("Selective Availability" ou SA). A partir de 2015, ces satellites bénéficieront d'un positionnement absolu, offrant une précision similaire. Le segment de contrôle est assuré par cinq stations terrestres de poursuite du 2nd Space Operations Squadron appartenant à la 50th Space Wing de l’USAF. Leur QG est basé à Schriever AFB dans le Colorado tandis que leur centre de calcul (Master Control Station) est situé à l’abri de la base de Cheyenne Mountain à Colorado Springs. Ce site est épaulé par quatre stations de contrôle situées à Hawaii, Kwajalein dans le Pacifique du sud, Diego Garcia dans l'océan Indien et à Ascension dans l'Atlantique Sud, ces trois derniers centres disposant également d'antennes paraboliques (à ne pas confondre avec celles du réseau DSN réservées à la NASA). Coup d'oeil sur le QG du système GPS à Schriever AFB
La mission du 50th Space Wing consiste à surveiller en permanence les données télémétriques et le moindre signe de défaillance des satellites GPS, de contrôler leur bonne marche en rétablissant notamment les satellites sur leur orbite, de synchroniser les horloges embarquées et de maintenir les éphémérides à jour. Ils surveillent également les paramètres ionosphériques car bien que les satellites GPS soient situés au-dessus des couches ionosphériques, les signaux doivent les traverser pour atteindre les récepteurs GPS. Ils sont donc très sensibles à l’activité solaire et géomagnétique. Le segment utilisateur représente l’ensemble des utilisateurs pouvant capter les émissions des satellites GPS. Les récepteurs sont passifs et leur nombre est illimité puisqu’ils opèrent comme autant de radios portatives. 2. Détermination d’une position par GPS La géodésie décrit directement la forme de la surface topographique. La position d’un point à la surface de la Terre est déterminée par ses coordonnées cartésiennes dans l’espace ou ses coordonnées géographiques exprimées en longitude et latitude (qui rappelons-le équivalent aux cosinus directeurs de la verticale en ce point). A cette description géométrique s'ajoute la description dynamique du point mesuré (en termes de potentiel et de pesanteur). Comme tout système basé sur la géodésie, le système GPS se base sur différentes mesures : - les mesures angulaires azimutales - les mesures de distances zénithales - les mesures de pesanteur - les mesures astronomiques (latitude, longitude et azimut).
Le principe de localisation par GPS est donc très proche du principe de la triangulation utilisé en astronomie ou en goniométrie. La distribution des satellites GPS a été conçue de telle manière que partout sur Terre on puisse atteindre à vue (par des moyens radios) au moins 4 satellites à tout moment afin de déterminer une position dans l’espace (à la surface du sol et en élévation). En pratique entre 6 et 10 satellites GPS peuvent être simultanément présents au-dessus de l'horizon mais la puissance de certains signaux ne sera pas toujours exploitable par le récepteur GPS. On y reviendra. La localisation d’un lieu se réalise en mesurant la distance entre l'utilisateur et plusieurs satellites GPS dont les positions sont connues en temps réel. Le récepteur GPS identifie le satellite grâce à un signal pseudo aléatoire (une réplique) émis par chaque satellite. Comme le montre les schémas suivants, le système dispose ainsi de 3 ou 4 sphères centrées sur les satellites dont l'intersection donne la position du récepteur GPS dans l'espace?
La trentaine de satellites GPS émettent en permanence des signaux sur deux fréquences UHF de la bande L à 1575.42 MHz (L1) et 1227.6 MHz (L2). Depuis 2010, ils utilisent également la fréquence L5 à 1176.45 MHz. Pour calculer l’heure et indirectement la distance avec précision, les satellites GPS disposent d’une horloge atomique embarquée calibrée sur la période d’excitation de l’atome de Césium-133 lorsque l’électron passe du niveau d’excitation f3 au niveau f4. Ce signal présente une période de 9192631770 cycles par seconde correspondant à une fréquence d’environ 9.2 GHz. Le satellite émet également des signaux comprenant ses éléments orbitaux (qui permettent de calculer sa trajectoire et sa position dans le ciel), ses éphémérides (données orbitales hebdomadaires) et l'heure exacte de départ du satellite. Extrait des éphémérides du satellite GPS PRN-01 préparé par Celestrak :
Le récepteur au sol, intégré au GPS, possède en mémoire les coordonnées précises des orbites d’un certain nombre de satellites de la constellation (entre 8 et 20 satellites). Le récepteur GPS télécharge ces informations grâce à une antenne micro-onde. Le GPS peut ainsi reconnaître le satellite émetteur, comparer les signaux horaires qu’il a reçu avec ses données internes afin de calculer le temps mis par le signal pour arriver jusqu’à lui et calculer la distance qui le sépare du satellite. Dès que le récepteur reçoit les signaux d’au moins quatre satellites simultanément, il peut calculer sa position exacte.
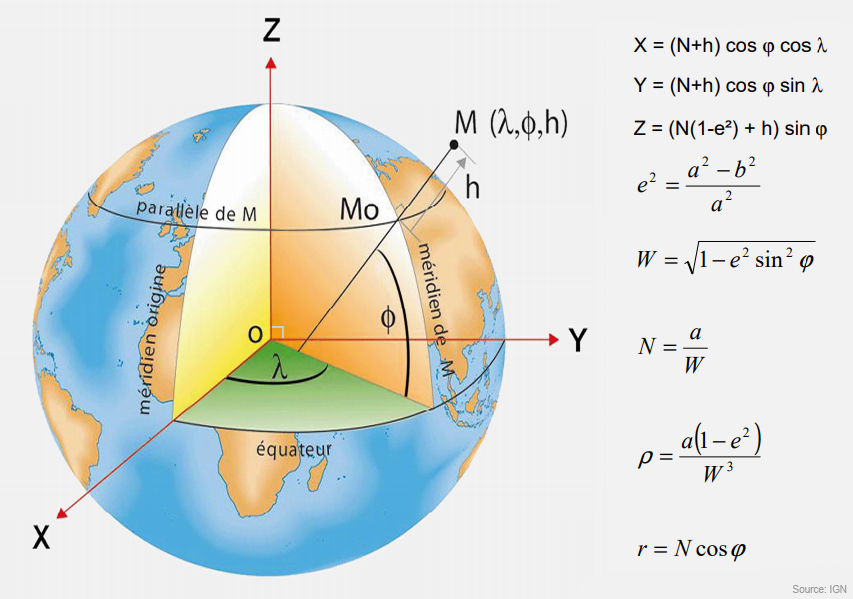
Pour augmenter la précision, le récepteur GPS s’assure que son signal est synchronisé avec celui émis par le satellite. La mesure de ce déphasage (effet Doppler) indique la distance qui sépare le satellite du GPS (D = cT où c est la vitesse de la lumière soit 299792.458 km/s). Pour éliminer la "dilution" sur la position (la zone d'incertitude rouge présentée à gauche par rapport à la position réelle P) et notamment pour calculer la position en altitude, les signaux d'un quatrième satellite sont nécessaires. A partir de ces données le GPS peut également fournir des informations sur la vitesse du récepteur, le cap vrai du déplacement, la variation en pourcentage de l'altitude, la correction de l'altitude comparée au modèle de la géoïde du lieu, etc. D'autres calculs spécifiques peuvent être effectués par des logiciels de navigation ou de gestion. 3. Précision du GPS Deux facteurs limitent la précision du GPS : la dégradation volontaire du signal et le temps d’acquistion du signal. A. La dégradation volontaire du signal Pendant plus d’une décennie, sur ordre présidentiel, les militaires américains ont dégradé intentionnellement le signal GPS destiné aux applications civiles en ajoutant un code de disponibilité sélective sur la porteuse du signal. De cette manière la précision était limitée à environ 90 mètres. Mais depuis le 1er mai 2000, le Président Bill Clinton ordonna de supprimer cette dégradation et d’offrir à tous les utilisateurs une précision théorique de 25 mètre en tout point du globe. Actuellement, compte tenu d'une erreur temporelle de 10-12 secondes, le système GPS garantit une précision de positionnement horizontal (DRucb dans le schéma) d'au moins 36 mètres 95 % du temps. En réalité le système est plus performant. En effet, pour pallier aux défauts technologiques inhérants à la technologie des années 70 et 80, depuis quelques années le système GPS exploite un système de correction local et global dénommé "Satellite Based Augmentation System" ou SBAS (qui devient WAAS aux Etats-Unis, EGNOS en Europe et MSAS en Asie). Moyennant ces “augmentations” (nombre de stations de poursuite plus élevée, GPS différentiel, traitement du signal, etc), la précision actuelle du positionnement à usage militaire atteint 1 mm 95 % du temps et 3 mètres à usage civil. Mais tous les GPS ne sont pas équipés de cette option. Si la précision des satellites GPS est très élevée, la précision des récepteurs GPS varie en fonction de leur mise à jour (à chaque initialisation des almanachs et des éphémérides) et des modèles. Ainsi, les récepteurs GPS utilisant le déphasage des signaux émis sur les deux fréquences de transmission sont plus précis que ceux n’exploitant qu’une seule fréquence (L1 à 1575.42 MHz). Ces derniers sont toutefois capables de déterminer la vitesse d’un récepteur mobile. On peut donc parfaitement utiliser un GPS d’entrée de gamme dans un véhicule qui se déplace. Notons que la fonction "snap" d'un logiciel de navigation qui permet de "coller" votre véhicule à la route n'a pas de lien direct avec ces corrections. Bien que ce logiciel travaille avec des données précises à quelque 10 m près, ce qui pourrait expliquer ce décalage, c'est au logiciel gérant la carte vectorielle à vérifier que le curseur symbolisant votre position est bien collé à la route. Enfin, si malgré tout le curseur s'obstine à vous marquer à quelques mètres de distance de la route, refaite un fix dans un endroit dégagé, au besoin en déployant l'antenne extérieure. B. Le temps d’acquisition Le temps mis pour calculer une position avec un GPS dépend du temps d'acquisition. Ce dernier ne dépend pas du logiciel de navigation ou de gestion puisque le calcul d'une position (un “fix” comme on dit dans le jargon) dépend directement de la bonne réception des signaux par le récepteur GPS. Le temps d’acquisition d’un signal dépend de plusieurs facteurs : - La géométrie des satellites par rapport au récepteur. Le facteur représente la “diluation géométrique de la précision” ou GDOP (Geometric Dilution Of Precision). Non seulement le récepteur doit disposer des signaux d’au moins 4 satellites pour faire un "fix", mais ils doivent également être disposés judicieusement sur la voûte céleste au risque de dégrader la précision des mesures. Ainsi, si les satellites sont trop rapprochés les uns des autres, l’intersection de leur sphère donnera une localisation moins précise que si les satellites étaient plus éloignés. - La stabilité en fréquence du satellite qui varie en fonction de l’intensité du champ de pesanteur : 35 ns soit 10.5 mètres - La précision des almanachs et éphémérides téléchargés par le récepteur : 33 ns soit 10 mètres - La traversée de l’ionosphère dont la durée varie en fonction de sa densité : 33-65 ns soit 9.8-16.6 mètres - La traversée de la troposphère : 13 ns soit 3.9 mètres - La stabilité du récepteur (l'horloge du récepteur, la résolution du récepteur, du niveau de bruit, la précision des calculs) : 9.7ns soit 2.9 mètres - Les trajets multiples : 8 ns soit 2.4 mètres - La dilution ou incertitude sur la position. Le signal d’acquisition du “fix” est émis à chaque seconde par le récepteur GPS. Mais généralement, durant ce temps le récepteur s’est déplacé et a parcouru une distance qui peut atteindre 33 mètres à 120 km/h. Quelques logiciels de navigation corrigent ce décalage. - La précision des cartes. Le GPS s’utilise généralement en combinaison avec des cartes routières ou topographiques spécialement concues à cet usage. Si la cartographie n’est pas asez précise, le curseur de navigation peut se trouver en dehors de la route suivie. Ce phénomène se produit lorsque le signal est temporairement occulté ou lorsque la carte n’est pas assez précise. Tous facteurs confondus, le cercle de dilution peut atteindre 40 à 50 mètres. Ce type de récepteur grand public présente une précision horizontale d’environ 50 mètres mais qui peut dépasser 100 mètres en montagne où il faut tenir compte de l’altitude. Si c’est tout à fait suffisant pour trouver la sortie d’une autoroute par exemple, cela peut s’avérer parfois trop imprécis en milieu urbain ou en plein nature lorsque vous êtes confronté à une bifurcation ou des dénivélations importantes. Ainsi que nous l’avons expliqué des “augmentations” hardware et software permettent de dépasser ces limitations d’un facteur 4. 4. Projections et calcul des coordonnées Pour déterminer les coordonnées d’un point à la surface de la Terre et notamment lors d’une balade en voiture, à moto ou à pied, il est quasiment impossible de se contenter d’une représentation tridimensionnelles sur un globe en coordonnées cartésiennes ou géographiques. Comme les cartes routières, l’utilisateur final a généralement besoin d’une projection plane. Ce changement de coordonnées est complexe à calculer car il faut transformer un système de coordonnées 3D en projection à deux dimensions. Cela signifie qu’il faut aussi rapporter tous les points de la surface du géoïde sur un ellipsoïde de référence M0(φ, λ) puis sur un plan m(x,y). Cette projection de l’ellipsoïde sur un plan implique qu’il y aura nécessairement des déformations des distances. Les cartographes doivent donc choisir au mieux la surface développable autour de l’ellipsoïde (plan, cône ou cylindre) et déterminer qu’elle transformation utiliser pour projeter ce point sur cette surface; c’est le but du système de projection qui consiste en fait en une transformation mathématique. Contrairement à leurs collègues étrangers, les géomètres et les topographes français exploitent le système de projection Lambert lorsqu’ils se réfèrent aux bornes du réseau géodésique. Il s'agit d'une représentation conforme, c'est-à-dire qu'elle conserve les angles au détriment des surfaces.
Comme l'indique le schéma présenté à droite (partie gauche), c'est une représentation cônique dont le sommet du cône est situé sur l'axe des pôles. On réalise la projection sur un cône circonscrit à la sphère. Les cartographes ainsi que le grand public (et une bonne partie du monde) tirent avantage de la projection plane UTM (Universal Transverse Mercator) ou projection cylindrique Mercator. Cette représentation est obtenue par projection de la sphère ou de l'ellipsoïde sur un cylindre tangent à celle-ci le long du méridien origine, que l'on développe ensuite. Enfin quelques pays utilisent la projection Mercator transverse de Gauss ou Kruger ou la projection polyconique. Les récepteurs GPS les plus perfectionnés sont capables de travailler dans différents systèmes de projection. Le GPS d’un topographe de l’IGN par exemple calcule d’abord le point dans le système de coordonnées mondial, le WGS84 (World Geodetic System 1984), puis transforme cette valeur en projection plane dans le système Lambert ou UTM par exemple. De cette manière on peut quadriller un territoire en projection plane sur une carte IGN. Ces cartes sont exprimées en unités métriques ce qui permet facilement d’évaluer les distances sur le terrain. Comme tout système de coordonnées, ces différents systèmes de projections planes disposent également d’un point d’origine et de deux axes de référence (un axe X orienté vers l’Est et un axe Y orienté vers le Nord et représentant le méridien origine). Le système Lambert a pour méridien origine le méridien de Paris qui n’a rien d'un standard international. Le système UTM en revanche se réfère au méridien de Greenwich. Quant à l’axe Est, le Lambert à l’inconvénient d’utiliser un parallèle d’origine différent pour chaque zone tandis que pour l’UTM, le parallèle d’origine est l’équateur. Les coordonnées que vous lisez ne sont donc pas les distances cartésiennes directes du point à l’origine. Il faut donc les déduire à partir de la valeur de départ du méridien ou du parallèle d'origine. On y reviendra. A l'intention des randonneurs et des pilotes de rallye, voyons à présent comment lire une carte IGN car cette représentation n’est pas triviale pour tout le monde. Prochain chapitre Lecture d’une carte IGN au moyen d’un GPS
|
|||||||||||||||||||||||||




{kind=link}