

soulearth
-
Compteur de contenus
116 -
Inscription
-
Dernière visite
-
Last Connexion
Soon available - 44353
Messages posté(e)s par soulearth
-
-
Pour deux raisons une valable et une beaucoup moins.
La première valable c'est qu'une batterie de voiture ça pèse un âne mort et je cherche plus léger.
La seconde purement psychologique c'est que j'ai mis 10 ans a passer le cap de l'investissement d'une monture équatoriale, donc je voudrais l'alimenter avec une alim qui soit propre.
-
Bonjour, Je suis face à un dilemme pour le choix de la batterie pour ma monture une eqm-35 et ma caméra une Altaïr 385c et les différents accessoires qui pourraient s'ajouter aux fil du temps ( résistance chauffante, écran a flat, etc ). J’hésite entre deux batteries :
La celestron lifepo4
https://www.astroshop.de/fr/batteries/celestron-powertank-lithium-pro-lifepo4-159wh/p,59629
Et la bresser 100W:https://www.astroshop.de/fr/batteries/bresser-mobile-power-station-100-watt/p,63756
Et honnêtement c'est le grand dilem. La celestron est super cher mais utilise une techno lifepo4 a priori qui serait meilleur:
Moins inflammable, nombre de cycle plus elevés avant d'etre HS ( 2000 ), peut etre moins sensible aux températures fraiches.
La bresser est une lithium ion plus classique mais deux fois moins cher et avec plus de ports, dont une prise 230V alternatif.La ou ca devient un casse tête, c'est que les deux ont la même capacité d'environ 155Wh ... Donc en théorie, strictement la meme autonomie, si on s'en tient aux considérations purement "d'électrique de puissance".
Sauf que quelles seront les autonomies réelles des 155Wh de la bresser vs celestron à partir de quelques cycle de charge, du moment qu'il fera un peu froid ou qu'elle auront été stockées un peu longtemps, ça je suis incapable de le dire.Est-ce que ça vaut vraiment de payer le double du prix ? Si c'est pour gagner 15min d'autonomie ça ne sers a rien.
Qu'en pensez vous ? Que feriez-vous ?Merci d'avance pour votre aide.
Cordialement.
Soulearth
-
Ok. Merci pour ton retour. Je vais essayer.
Cordialement.
-
 1
1
-
-
Bonjour @astrocrisPourrais tu nous dire ce que tu as utiliser comme fonction dans astrosurface. Je suis particulièrement intéressé par la méthode pour réhausser le ton rouge. J'ai moi aussi une image de Mars a traiter") Merci d'avance,
Merci d'avance,-
1
-
-
Bonjour Messieurs,
Avec toute votre aide, j'ai pu avancer dans ma réflexion.
L'objectif est toujours le même, avancer à 15.04 arcsec/sec avec une résolution minimum de 1 arcsec/s, avec le moins de vibration possible, le but étant d’être précis.
Alors attention, j'ai essayé de faire une synthèse de toutes infos :
- Faire attention au jeu mécanique
- utilisation conseillée des micropas pour les vibrations
- Fréquence comprise entre 0 et 1000 Hz pas choquante
- Fréquence > 40Hz pour être raccord avec les moteurs de suivi du commerce
J'ai fait un petit fichier excel que je mets en pièce jointe car au bout de la 10eme combinaison ma tête a explosée.
J'ai également avancé sur mon calcul de centre de gravité. Il est exactement à 403mm du sol ce qui nous fait un rayon de secteur nord de 64.78cm.
Voila ce que ça donne :
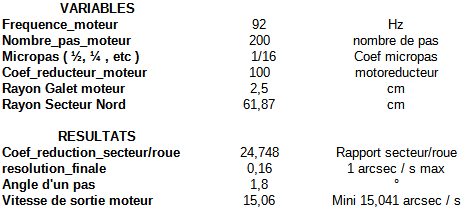
Alors bien sur, j'ai pris un rayon pour la petite roue un peu au pif ( une valeur moyenne ) et en fonction de la construction de la table, le rayon du secteur Nord peut changer légèrement aussi donc il n'est pas exclus d'avoir + ou - 10% sur la fréquence. Mais on a la un sacré ordre de grandeur.
Suite à vos conseil, j'ai trouvé ce moteur : https://www.omc-stepperonline.com/precision-planetary-gearbox/nema-17-stepper-motor-l39mm-gear-raio-1001-high-precision-planetary-gearbox-17hs15-1684s-hg100.html?mfp=161-motor-nema-size[Nema 17]%2C168-gear-ratio[100%3A1]
C'est la même réduction que le premier mais en mieux et plus cher. Mais surtout le Backlash est < 25arcmin.
N'hesitez pas à me faire part de vos remarques.
Bien cordialement
-
A oui !!! L'exemple avec la roue de voiture est éloquent. Tu as raison la roue va patiner avant que le moteur n'arrive au maximum.
-
@Jijil non c'est très bien. Je suis même très content de croiser quelqu'un qui planche sur le même projet et qui rencontre des difficulté similaire. Si on y réfléchi a plusieurs, ce sera plus simple pour tous.
D'ailleurs je ne sais pas ou tu en es dans l'étude ( a priori tu bosses activement sur la motorisation ), mais si tu veux qu'on échange des infos, des techniques, nos choix ou avis , etc, ce sera avec plaisir ( ca peut etre en mp ou mail ).
-
Merci pour ta réponse extrêmement complète fljb67. C'est pour faire de la photo mais avec une caméra et du live stacking, ce qui peut supporter une dérive au bout de plusieurs minutes mais bien sûr les vibrations non stop c'est impossible.
Je suis en train de calculer avec précision le centre de gravité de l'ensemble. Dès que je l'aurai nous aurons avec précision le rayon de rotation. La roue n'est pas encore choisi mais ça va de 2cm a 3cm de rayon pour les plus petites.
Cordialement.
-
Désolé je t'ai fait une réponse très parcellaire. A la sortie du motoréducteur, fixé sur l'axe, il va y avoir une roue type roue de roller. On peut estimer le rayon de la roue en question entre 2cm et 3cm.
Ensuite cette roue de roller sera en contact directe par frottement sur le secteur tournant environ 60cm de rayon.
Pour la valeur de la fréquence, je suis bien d'accord avec toi. A ton avis quel serait une fréquence cohérente ?
De ce que j'ai compris, plus j'utilise des micropas plus le déplacement sera fluide sans secousse, ce qui est important. Et plus la fréquence est élevée mais fortement réduite ( pour garder la même vitesse ) et même chose, plus ce sera fluide. Maintenant c'est histoire de compromis, et la je ne sais pas.
-
Par contre en terme de motorisation, un moteur piloté à 1000Hz pour toi c'est pas choquant ? Vraiment la je suis dans le flou car aucune experience ni ordre de grandeur.
-
Mon calcul était fait sur la base d'une fréquence de 15.041 Hz pour avoir 15.041 pas de 1" en une seconde.
Ce qui sans utiliser les micropas fait 15.041x1.8 = 27.07° en 1s
27.07/6480x3600=15.041° /h .
Et oui c'est bien un moteur 200pas avec un réducteur de 99.05.
Donc pour toi, 1000Hz ou 5000Hz ca n'a rien de déconnant comme fréquence ? Moi j'avais vu que 500Hz c'etait déjà beaucoup pour un moteur pas à pas. C'est pour ca, ca me fait douter.
Apres, je pense passer en mode microspas 1/16, pour diviser la vitesse par 16 et la reduction d'autant. Ce sera plus simple que s'essayer d'avoir une reduction de 6480.... Je pourrais donc certainement viser un moteur avec une reduction moins importante.
-
Bonjour,
Je me suis lancé dans le projet de fabriquer une table équatoriale mais j'aurai bien besoin d'aide car je découvre totalement les moteurs pas à pas et c'est dur.
## Version courte du problème ##
Après recherches il ressort que la solution conseillée est le trio arduino + driver a4988 + moteur pas à pas.
J'ai vérifié la fréquence de base du PWM d'un Arduino ( sans diviseur ) et c'est autour de 500Hz. Sur internet toujours j'ai lu que 450Hz c'était déjà beaucoup pour un moteur pas à pas, donc tous allait pour le mieux. Ça semblait cohérent.
Je cherche donc le moteur de mes rêves, en demandant quelques informations du genre la fréquence max, et voila la docs technique :
https://www.omc-stepperonline.com/download/17HS19-1684S-PG100_Torque_Curve.pdf
Le documents indique 500Hz pour 1RPM et jusqu’à 5000Hz pour 8RPM. Incohérence total!!! A priori 400Hz c’était déjà beaucoup et la c'est présenté comme le minimum. Et alors le maximum de 5000Hz !!
Je ne comprends pas. Pouvez-vous m'aider ?## Version longue ##
Après recherches il ressort que la solution conseillé est le trio arduino + driver a4988 + moteur pas à pas.
J'ai vérifié la fréquence de base du PWM d'un Arduino ( sans diviseur ) et c'est autour de 500Hz. Sur internet toujours j'ai lu que 450Hz c'était déjà beaucoup pour un moteur pas à pas, donc tous allait pour le mieux. Ça semblait cohérent.
Calcul détaillé :
La terre tourne environ à 15.041"/s. C'est donc la vitesse que doit avoir ma table.
Pour que les pas ne soit pas visible à l'oculaire, il faut qu'ils soient assez petit. A priori, la limite se situe à 1"/s ce qui correspond à la précision maximum que nous impose l’atmosphère à cause de la turbulence.
De ce fait, en 1s la plateforme doit avoir un déplacement de 15.041" par pas de 1". Le calcul est donc pas trop compliqué il me faut 15.041 pas en sortie de "chaine d'entrainement" .
Donc 15.041 pas en 1s. Avec des pas de 1".
Si je ne me trompe pas, Fréquence_moteur = Nb_pas_parcouru / 1s. Donc Fréquence_moteur = 15.041 / 1s = 15.041Hz.
Fréquence_moteur = 15.041 HzJe poursuit donc sur mon calcul de réduction.
Je part sur un moteur pas à pas classique de 200 pas. Soit 1.8° par pas, soit 1.8 x 3600 en second d'arc.
Vitesse_Table = Vitesse_moteur / coef_reduction
Soit 15.041Hz x 1"/s = 15.041 x 1.8 x 3600 x 1/coef_reduction
Coef_reduction = 6480.
Bon j'ai ma fréquence, mes vitesses, mon coef de réduction, je suis le plus heureux des hommes. A priori 6480 de réduction c'est énorme mais j'ai les micros-pas sous diminuer la vitesse et donc la réduction d'autant.
Je cherche donc le moteur de mes rêves, en demandant quelques informations du genre la fréquence max, et voila la docs technique :
https://www.omc-stepperonline.com/download/17HS19-1684S-PG100_Torque_Curve.pdf
Le documents indique 500Hz pour 1RPM et jusqu’à 5000Hz pour 8RPM. Incohérence total!!! A priori 400Hz c’était déjà beaucoup et la c'est présenté comme le minimum. Et alors le maximum de 5000Hz !!
Je ne comprends pas. Pouvez-vous m'aider ?Vous l'aurez compris, j'ai quand meme potassé le sujet, fait des calculs dans tous les sens, tué quelques bloc note, mais la je bute totalement. Entre 500Hz et 5000Hz pour une vitesse considérée comme haute, il y a un facteur de 10x. Je ne peux pas laisser une erreur potentielle de x10 se balader comme ca.
Merci d'avance à tous ceux qui tenteront de me sortir de ce mauvais pas
-
 1
1
-
-
Bonjour.
Je suis également en train de réfléchir a une table équatoriale.
Si ça peut aider, côté moteur je vois deux options :
- moteur eq1 mais avec circuit de pilotage maison comprenant un régulateur de tension et un pwm pour régler la vitesse.
- un moteur pas a pas type nema avec pilotage Arduino et surtout utilisation du micropas pour avoir un réglage précis et une rotation fluide.
De mon coté, ca prend doucement forme mais je sèche sur un point, comment vous faites pour débrayer le moteur une fois arrivé en fin de course ?
Je part sur un système par entraînement via galet moteur / roulette sur le secteur.
Merci d'avance
Cordialement
choix powerbank
dans Astronomie pratique
Posté(e)
Merci messieurs pour ces conseils. Je vais étudier tout ça avec attention.