
Cay2
-
Compteur de contenus
242 -
Inscription
-
Dernière visite
-
Jours gagnés
4 -
Last Connexion
Soon available - 82236
Messages posté(e)s par Cay2
-
-
il y a 29 minutes, jackbauer 2 a dit :Contrairement à MIRI, je n'ai pas trouvé de photos de ses roues à filtre, snif...

Oui, pas facile à trouver ...
Il y a celle-ci trouvée sur la publi suivante (page 13):
http://www.iap.fr/elixir/Documents/Astrium/MRieke_ELIXIR.pdf

-
 6
6
-
-
il y a 31 minutes, Bingocrepuscule a dit :Je suis sur que Marc pourra en parler mieux que moi, comme il l'a proposé, s'il ne le fait pas j'essaierais de prendre mon courage à deux pieds.
Je ne suis pas certain d’être plus à même d'en parler que toi
 . C'est sympa de le penser, merci
. C'est sympa de le penser, merci ") !!
!!
Te casse pas la tète
.
J'ai accès à pas mal de docs sur le sujet, notamment celle de SPIE, et autres. J'ai aussi le même genre de problèmes à résoudre sur l'ELT


 ...
...
La version 2012 est un bon résumé, il y a aussi des docs 2018 un peu plus fraîches. Je me base sur toutes ces publis pour essayer de faire un résumé compréhensible par le plus grand nombre, en français.
C'est dans les prochains posts en préparation.Marc
-
6
-
-
Il y a 13 heures, Bingocrepuscule a dit :Je n'ai pas trop le courage de lire les 35 pages précédentes, mais sait on comment le phasage des segments du télescope est fait. Les segments doivent avoir des senseurs pour mesurer des positions relatives entre les segments, mais en général la mesure de ces senseurs ne suffit pas et il faut mesurer le déphasage des segments en pointant une étoile et avec un instrument dédié (il y a plusieurs techniques, phase mask, lenslet...). C'est comme cela du moins que les télescopes au sol sont phasés (GTC, ELT, KECK...). Du coup y a t-il un instrument dédié pour le phasage on board?
Je décris cela dans un poste à venir, très bientôt
Marc
-
1
-
-
L’alignement du télescope Webb - #4
Comme vu au post précèdent, au premier pointage du télescope et à la première image acquise sur NIRCam :
- Le télescope ne point pas au bon endroit, l’axe optique du télescope n’est pas en accord avec la ligne de visée donnée par les Star Trackers

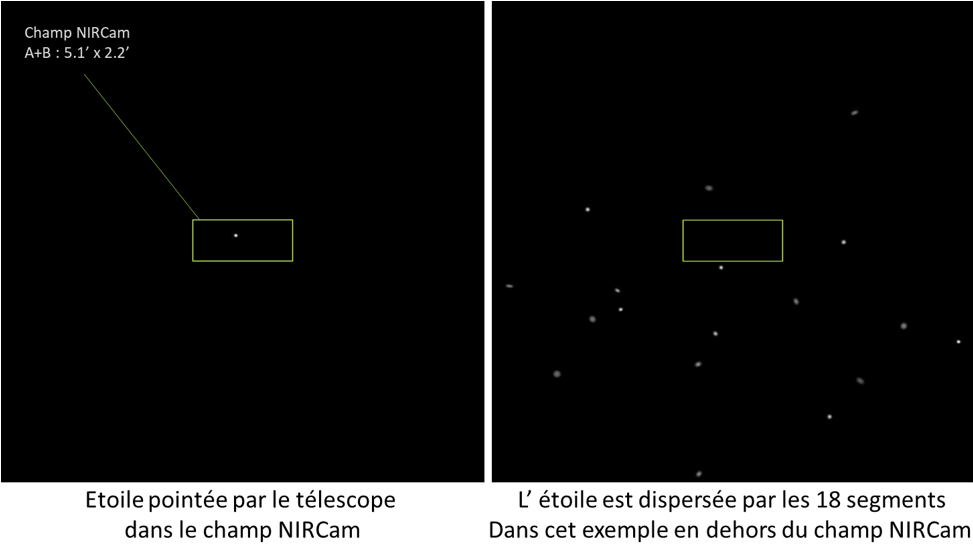
- Les segments ne sont pas alignés et dispersent les images. On voit sur NIRCam la superposition de 18 images décalées.
Imaginons qu’on pointe une région du ciel où il n’y a qu’une étoile, centrée sur NIRCam d’après le Star Tracker. L’image de l’étoile est dispersée 18 fois, et l’ensemble est décalé de l’erreur de pointage. Pour capturer les 18 images d’étoiles, une mosaïque de pointages télescope doit être réalisée.
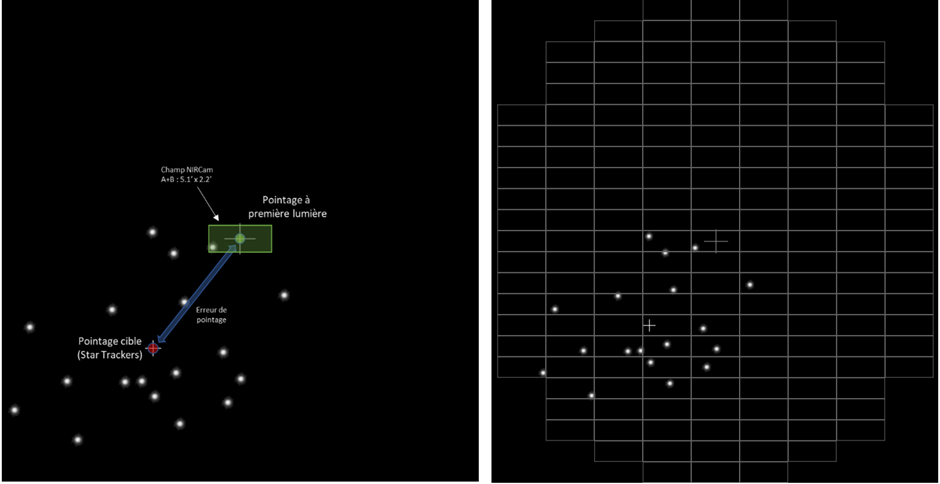
La taille de la mosaïque est évidemment fonction de l’erreur de pointage et de l’étendue de la dispersion. Le nombre de pointage croît comme le carré de ces quantités …
L’estimation NASA pour couvrir un champ total de rayon 30 arcmin est de 3 jours [191 pointages et 382 images – figure de gauche]. Si jamais seul un des deux modules NIRCam peut être utilisé, on passe à 5 ½ jours [349 pointages et images]. Le temps passé pour l’étape mosaïque pourra donc s’étendre d’un jour a une semaine, voire plus.

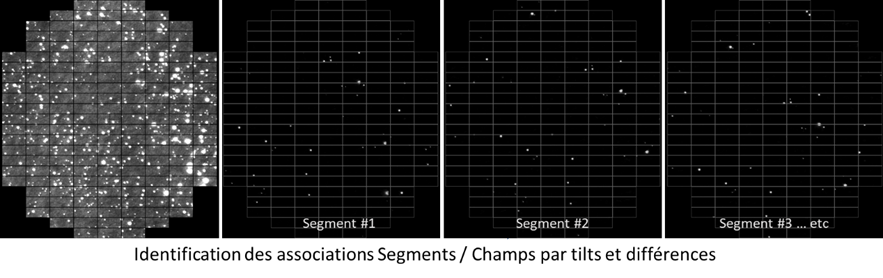
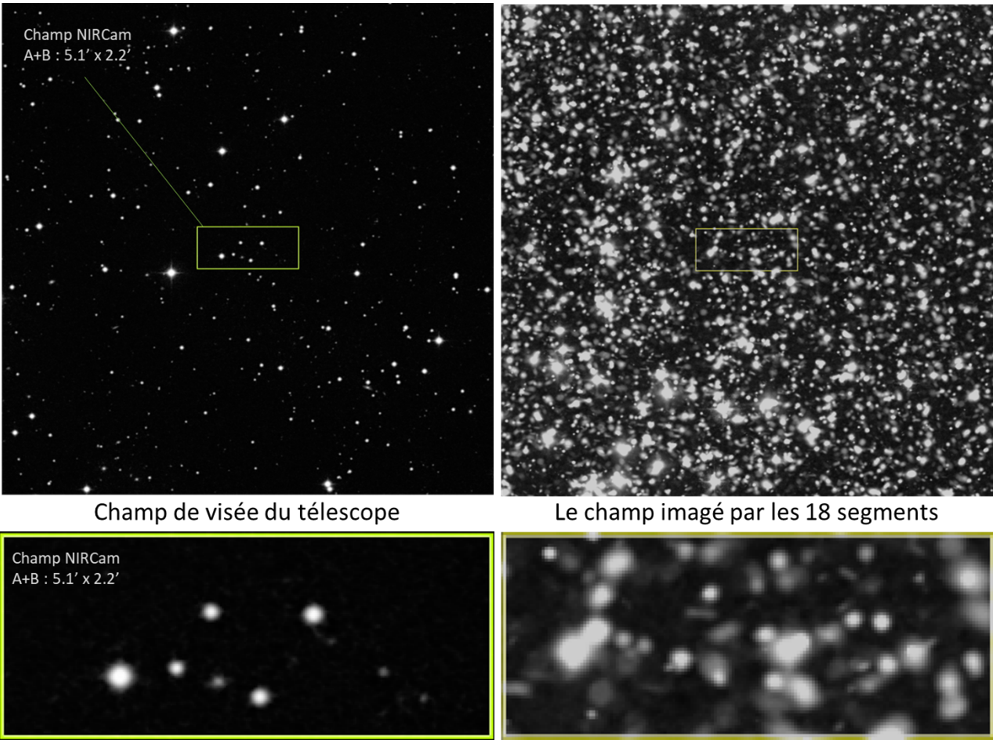
Dans la pratique il peut y avoir pas mal d’étoiles dans la mosaïque. Par traitement de l’image on va chercher un motif qui se répète 18 fois par translations. Cela permet d’isoler les images associées a chaque segment.
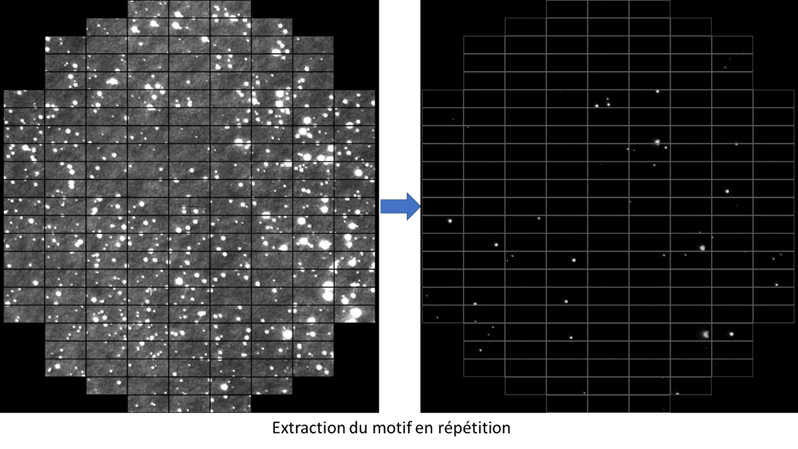
Ahhhh… On a une cartographie qu’on peut passer à la moulinette en astrométrie pour savoir exactement où on se trouve (on envoie un mail à @Superfulgur qui se fera plaisir avec Astrometry.net).
De tout cela on extrait :
- L’étoile que les Stars Trackers étaient censés viser
- Ses 18 positions sur la mosaïque
- La ligne de visée du télescope, qui se trouve au barycentre de ces 18 positions.
Avant de poursuivre on a besoin de savoir quel segment correspond à quel décalage. On va pointer les 18 positions une à une et procéder comme suit.
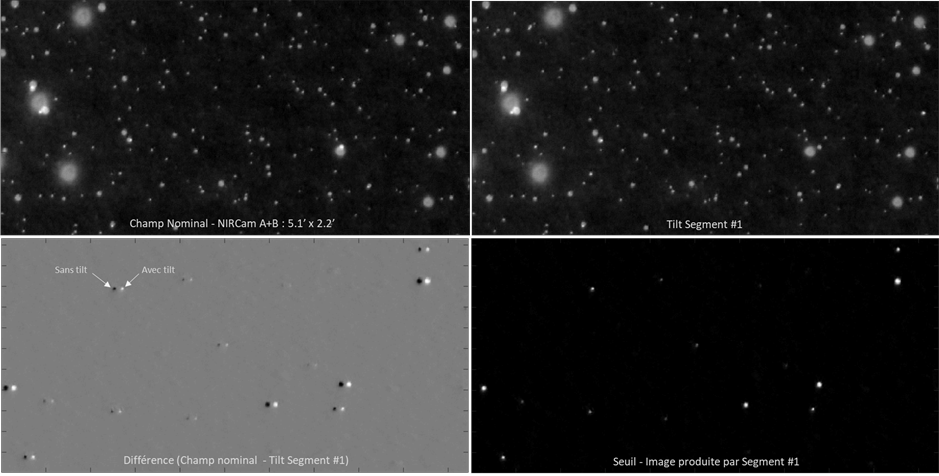
On prend le segment #1 et on le tilte de quelques arcsec [En haut, à droite]. On fait la différence entre les deux images, on enlève ainsi tout ce qui n’est pas du segment #1 [En bas, à gauche].
On seuille la différence à zéro, et zou !, on vire ainsi les trous et on retient l’image en provenance du segment #1 [En bas, à droite]. Et on répète la manip pour les 18 segments…
Maintenant on sait qui est qui et qui est où. On envoie 18 commandes de tilt de segments pour qu’ils visent au même endroit (barycentre des 18 positions).
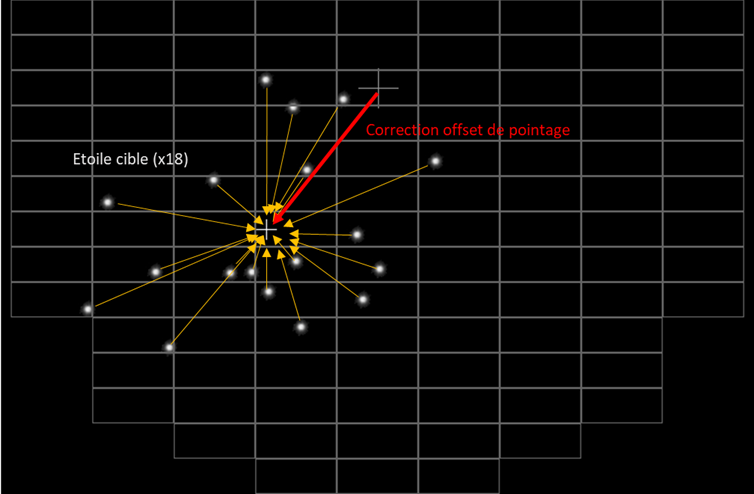
On corrige l’offset de visée entre les Star Trackers et le Télescope. On pointe une étoile qui va permettre de stacker et phaser.
On ne superpose pas les 18 images d’étoiles, mais on les arrange suivant un pattern régulier, de quelques secondes d’arc de rayon :
On voit pourquoi au prochain épisode...
Marc
-
6
-
 1
1
-
 8
8
-
-
-
il y a 19 minutes, Pepit0 a dit :Et concernant le JWST ce qui précède s'applique. Les responsables de cette décision de ne pas remplacer les actionneurs a due être bien pesée et ceux qui on calculé et décidé ont signé avec leur sang à n'en pas douter ^^'
Bravo à eux si tout se passe comme attendu.
J'ai de nouveau regardé plus en détails cette histoire de LVDT dans les docs disponibles :
"Lorsqu’un mouvement est commandé, le Mirror Control System calcule la longueur attendue de l’actionneur à partir du nombre de pas grossiers du moteur. C’est-à-dire que la boucle de commande principale se base sur le comptage du nombre de pas et la lecture du resolver (codeur) en sortie de moteur.
Un algorithme convertit ensuite cette longueur en lecture LVDT attendue à l’aide d’un ensemble calibré de coefficients. Si la lecture LVDT en télémétrie correspond à la valeur prédite à l’intérieur d’une tolérance calibrée, le déplacement commandé est confirmé."
Le LVDT sert donc de cross-check pour valider un déplacement piloté sur le moteur et son codeur.
Ainsi, pendant le déploiement :
- si le LVDT tombe HS : on pilote sur la boucle nominale, sans cross-check.
- si le codeur tombe HS : on pilote avec les nombres de pas + cross-check LVDT Single Sided.
Apres le déploiement, en mise en phase et opération on a un feedback supplémentaire qui est optique. Et les ajustements ne doivent que rarement faire appel à l’étage grossier, donc au LVDT.
-
3
-
1
-
-
il y a 59 minutes, Meade45 a dit :Il va s'en prendre des micrométéorites c'lui-là !
Vaste sujet
Il y a quelques bons posts sur ce sujet ici (en anglais, sorry, faut lancer le traducteur) :
et là :
Il serait intéressant de développer ce qui y est dit ...
En gros : au point de Lagrange L2 on navigue sur un plateau, à proximité d’un puits de potentiel. Il faut des corrections régulières pour s’y maintenir. Autrement dit L2 n''est pas stable, ce n’est pas un endroit où s’accumulent les débris. Par contre c’est le cas pour L4 et L5.
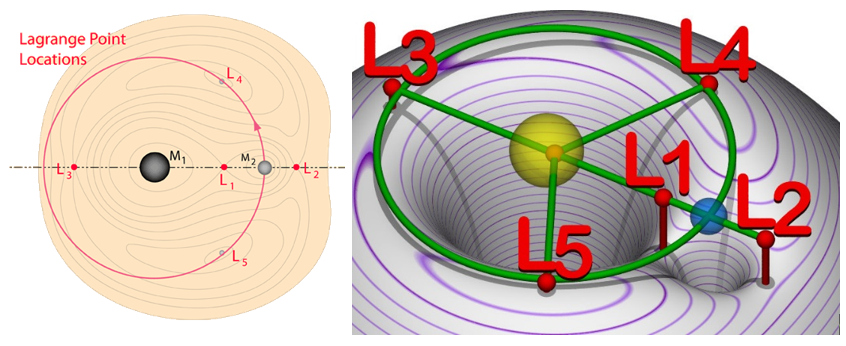
On est loin des attracteurs (Terre, Lune) qui bien évidemment vont attirer tout ce qui passe… avec à la clé soit un passage temporaire, soit une prise d’orbite, soit une chute avec collision des débris en question.
Ainsi la densité de micro-débris à proximité de la Terre, par exemple, est bien plus forte qu’ à L2.
Les miroirs sont en Beryllium, donc en métal, donc un impact va faire un trou genre mini impact de balle, mais contrairement au verre ne va pas créer d’éclats qui se propagent et sont plus endommageants. Ci-dessous impact Hubble panneaux solaires :
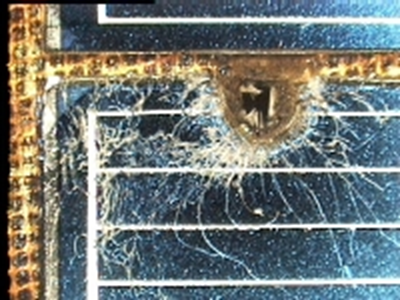
Le primaire c’est en gros la pupille, donc si il a des petits trous la conséquence du point de vue optique est probablement insignifiante (tant qu’on n’a pas des trous genre ballons de foot ou bagnole Tesla qui est passée à travers…). Le M2 n’est pas sur une image intermédiaire, donc même combat.
Quand j’étais a REOSC on avait examiné des miroirs en Zerodur de 1-m qui avaient séjourné en orbite environ un an : des micro-impacts il y en avait partout, mais on les détectait au microscope car ils faisaient quelques microns. Quelques impacts de plusieurs centièmes. Un ou deux impacts visibles à l’œil nu genre un dixième de millimètre ou deux. Rien de bien affolant donc.
Evidemment la probabilité qu’un gros débris passe dans le coin n’est pas nulle. On n’est jamais à l’abri de rien.
Donc pour les optiques : à priori ne pas trop s’inquiéter.
Pour finir, si un machin qui passe vient fracasser un système de contrôle ou de communication, c 'est beaucoup plus grave que des ptits trous dans les optiques.
Marc
-
3
-
5
-
-
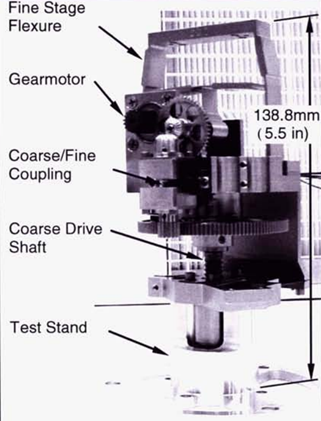
il y a 50 minutes, Pascal C03 a dit :Ce qui serait bien, ce serait d'avoir quelques dimensions sur l'image pour donner l'échelle.
Les seules que j'ai trouvées :
-
Il y a 6 heures, jackbauer 2 a dit :Est-ce que tu peux expliquer en clair pour le profane ta capture s.t.p ?
En clair ??? Suis pas certain !!

J'essaie quand-même :
Le LVDT (Linear Variable Differential Transformer) est un capteur inductif. Sa conception est assez simple :
L’élément qui se déplace est un noyau ferromagnétique (un bout de fer, en gros). Il est entouré d’une bobine principale et d’une bobine secondaires elle-même composée de deux bobines.
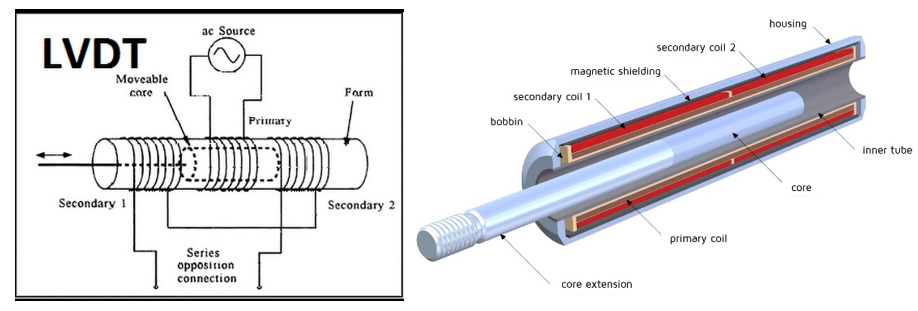
La bobine principale, centrale, est excitée par une tension alternative, qui crée un champ induit dans le noyau. Les deux bobines secondaires ont des spires de direction différentes et sont montées en série (mais elles sont séparables). Si le noyau se déplace, la tension mesurée aux bornes du bobinage secondaire varie linéairement avec le déplacement. La variation de phase indique le sens de déplacement.
https://aviatechno.net/trans/lvdt.php
Ce que je comprends de l’explication donnée c’est qu’un des deux bobinages secondaires est défectueux. Dans ce cas il y a encore un signal sur l’autre bobine secondaire : on utilise le LVDT en mode ‘simple face’ au lieu de ‘double-face’. Cette dissymétrie pose un souci de plus forte variation des coefficients de comportement avec la température. Mais bon, à priori ils savent gérer cela.
Les actuateurs travaillent en bipodes, 3 bipodes par segment. Si l’un des deux senseurs LVDT du bipode travaillent en mode simple-face, il faut basculer l’autre dans ce mode aussi : il y a une procédure de vérification du déplacement différentiel entre les deux actuateurs, afin d’éviter des contraintes trop importantes dans les éléments élastiques de liaison, et cette procédure nécessite que les LVDT d’un bipode travaillent dans le même mode.
Le LVDT mesure le déplacement direct de l’étage grossier. Normalement on peut aussi contrôler ce déplacement en comptant les pas du moteur et en s’appuyant sur la lecture du codeur en sortie de moteur. Mais on perd en résolution et en précision.
Je pense que changer ces deux LVDT aurait crée pas mal de problèmes de retour en arrière de la phase d’intégration… Avec ce que cela implique en terme de risques, de coûts, de planning … Et que compte tenu de la redondance de mesure du déplacement + la lecture en mode simple-face ils ont voté ‘on continue avec ce mode dégradé’. Les réunions sur ce sujet ont du être sympas.
Sais pas si c'est clair...
Marc
-
4
-
7
-
-
il y a 8 minutes, jackbauer 2 a dit :J'ai posé la question directement à Mark. Voici sa réponse :
Mille mercis d'avoir posé la question et d'avoir obtenu la réponse.
Cela confirme donc ce que je subodorais ...
Je m’étonne qu'on envoie JWST sans avoir résolu ce problème. Il y a des raisons, mais bon au prix du truc ...
Marc

-
1
-
-
Sa réponse reste laconique… si un codeur ou un lvdt est HS, il est vrai qu’on peut encore piloter l’actuateur mais le schéma de contrôle doit être adapté. Dans ce cas ils remettent peut-être la mise en oeuvre à plus tard…
-

Hm ...
Bizarre ...
Comme je le disais dans un de mes posts plus haut, cela voudrait dire que :
- soit ces segments ont un/des senseurs défectueux (Coder du moteur, ou LVDT de l'actuateur)
- soit je ne sais pas, subtilité inconnue
Qqn sait ?
-
il y a 29 minutes, Superfulgur a dit :Sinan, pour le réglage des 18 miroirs, je propose une cible brillante, ça facilitera : M 13
-
1
-
 1
1
-
-
il y a une heure, jackbauer 2 a dit :Petit retour sur la comparaison Hubble/JWST concernant la résolution. Le n°555 de C&E (sept-oct 2017) consacrait 8 pages au télescope alors en test dans la chambre A (Houston). Le lancement était prévu l'année suivante...
Vincent Coudé du Foresto (Lesia) y disait ceci :
Oui. Certes.
Mais encore une fois Hubble avec WFC3 ne voit rien à 0.2 micron.
Il vaut mieux comparer Hubble à 0.4 micron et JWST à 0.6 micron. Dans ce cas JWST est en gros deux fois meilleur.
Res(JWST @ 0.4 mic) - 1.8 x Res(HST @ 0.6 mic)
Si on les compare en terme de résolution à leurs longueurs d'onde optimum [HST: 0.5 micron - JWST 2 microns], JWST est un peu moins bon :
Res(JWST @ 0.5 mic) - 0.7 x Res(HST @ 0.4 mic)
-
3
-
-
Il y a 6 heures, Roch a dit :- On prend une image puis une autre après avoir légèrement bougé un segment
- On soustrait les deux images ce qui permet d'isoler l'image issue uniquement dudit segment
La NASA dit :
'At the first pointing location, all 18 segments are tilted a small amount, such that the corresponding segment image moves a few arcseconds across
the NIRCam focal plane. At each subsequent pointing location, segments identified during the previous operations are excluded. Images of the field are taken before and after tilting each segment. As shown in Figure 4, a simple differencing operation will reveal when a segment image has been moved.'Les petits tilts de segment et détection par différenciation seront utilisés en combinaison avec la mosaïque.
Donc oui, tu peux aller bosser a la NASA.
Bravo !
-
1
-
1
-
-
L’alignement du télescope Webb - #3
En plus du problème de l’erreur de premier pointage à la première lumière NIRCam :
- Les segments du M1 sont désalignés
- Le secondaire M2 est désaligné
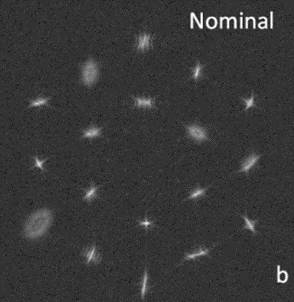
Il en résulte que l’image d’une étoile ou de tout autre objet est constituée de 18 images produites par des télescopes aberrants [erreurs de focus, d’astigmatisme, et dans une moindre mesure de coma et d’aberration sphérique].
Compte tenu des tolérances d’installation des segments à leur position de travail, la dispersion des images peut atteindre 30 arcmin (rayon), donc au pire couvrir deux diamètres de pleine lune …

Le champ imagé par NIRCam contient donc la superposition de 18 images. Il contient entre autres des images d’objets en dehors de son champ de visée.
Un belle pagaille…
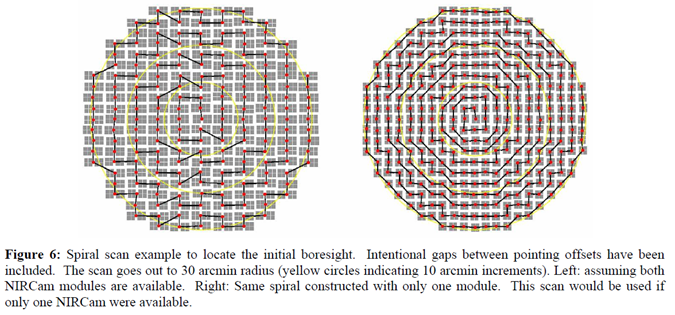
On pourrait penser qu’une solution consisterait à faire spiraler les segments, un à un, afin de retrouver une même étoile ou un même pattern d’étoiles imagés par les 18 segments dans le champ NIRCam ?

En faisant l’hypothèse que la dispersion des segments est de 30 arcmin (rayon), il faut une spirale de 250 étapes et images NIRCam pour couvrir la surface couverte par ce rayon. Avec une bonne probabilité de trouver le pattern avant couverture complète d’une spirale, on aboutit au total à des centaines voire des milliers de mouvements de segments. Et autant de prises et transmissions d’images NIRCam…
Cela prendrait un temps considérable, et irait à l’encontre d’une minimisation de l’usage des équipements, les actuateurs dans le cas présent.
On doit procéder autrement… C’est l’étape Mosaïque décrite au prochain post.
Marc
-
5
-
5
-
-
Il y a 2 heures, Superfulgur a dit :Ca prend genre deux secondes à trouver sur Astrometry.net, demandez moi, quand vous savez pas
Oui, mais quand l'image récoltée est en fait composée de dix-huit images de télescopes collimatés par des cochons, c'est un peu plus ardu. Je reviens sur ce sujet bientôt.
-
2
-
-
L’alignement du télescope Webb - #2
Apres avoir mis les segments du M1 et M2 à leur poste de travail (en cours), il y a l’injection L2. D’ici là les instruments auront suffisamment refroidi (NirCam sera à 80K ou moins), pour pouvoir les mettre en fonction. Le premier travail ça va être d’ ajuster le pointage du télescope. C’est le travail de l’ACS (Attitude Control Subsystem).
L’ACS référence et mesure l’orientation et les mouvements de l’observatoire au moyen de :
- senseurs solaires (Sun Sensors)
- senseurs d’étoiles (Star Trackers)
- gyroscopes
L’application des forces et des couples pour le contrôle du pointage ou les manœuvres est réalisée via :
- des roues à réaction (reaction wheels)
- et / ou des propulseurs (thrusters)
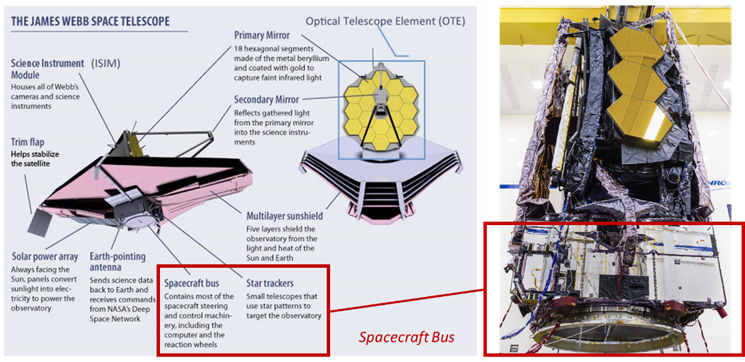
Ces sous-systèmes sont intégrés au Spacecraft Bus, le module de service, situé sous le pare-soleil, en partie chaude.
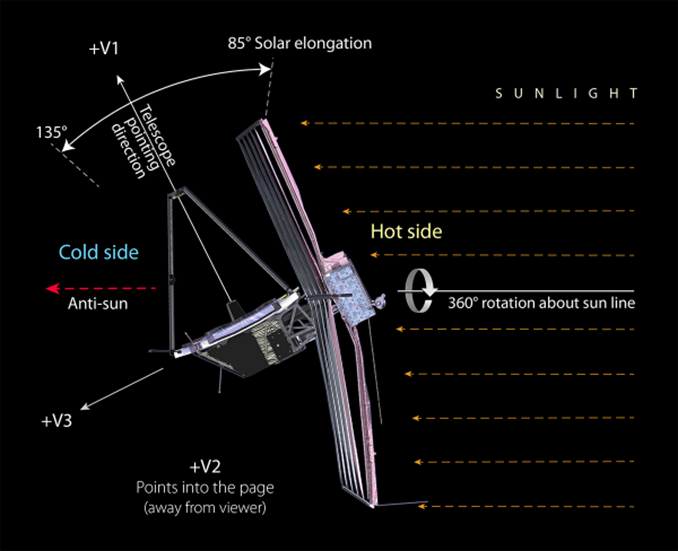
Normalement l’ACS pointe le télescope (le +V1 ci-dessous) à moins de 8’’ de la position commandée avant l’acquisition de l’étoile de guidage sur FGS pour guidage fin.
La durée des déplacements (slewing) est fonction de l’amplitude du mouvement. La vitesse est déterminée afin d’atteindre le nouveau pointage le plus tôt possible, tout en maintenant des temps de stabilisation dans des limites acceptables. Pour des repointages compris entre 25’’ et 3°, la vitesse de balayage est plus lente que pour ceux plus courts ou plus longs, afin d’éviter les modes d’agitation du propergol dans les réservoirs. Une fois excité, l’amortissement du propergol peut prendre beaucoup de temps (plus de 20 minutes dans certains cas).
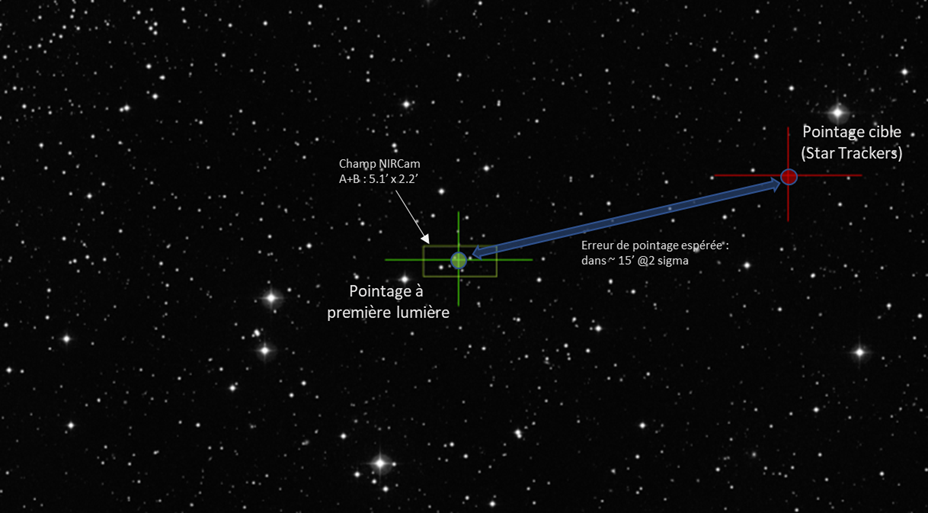
Le premier pointage visera une portion de ciel pauvre en étoiles et imagée sur NIRCam pour préparer l’alignement et la mise en phase du télescope. Cependant :
- Le champ de NIRCam est limité, 5.1 x 2.2’ en utilisant ses deux modules A et B.
- Entre les réglages au sol et l’orbite L2, il y a des erreurs d’alignement des composants de l’observatoire. L’erreur estimée peut aller jusqu’à plusieurs dizaines d’arcmin.
A son premier pointage et à sa première lumière, le télescope ne saura donc pas où il vise…
Marc
-
4
-
5
-
-
Le 10/01/2022 à 16:52, Cay2 a dit :Donc, par analogie cela devrait plutôt ressembler à :
- Réveil du module de contrôle-commande des actionneurs. Off>Stand-by>On.
- Lancement des diagnostics du contrôleur pour voir si ce dernier n’a pas souffert.
- Check des signaux de réponse des LVDT des actionneurs (senseurs de position).
- Check des signaux de réponse des codeurs des moteurs pas à pas.
- Un segment après l’autre, pour chaque actuateur : envoi de commandes de mouvements faible course et vérification du bon fonctionnement des
moteurs et des boucles de contrôle, déplacements grossiers et fins.
- Si tout est ok, on monte le segment de 12.5 mm, tranquillement, par étapes. On répète pour les suivants.
- Le tout pour 18 segments x 6 actuateurs = 108.
Merci @jackbauer 2
Très bonne nouvelle qui confirme que le scénario envisagé était le bon, et qu'on a franchi des étapes cruciales :
- A priori tous les moteurs/actionneurs sont fonctionnels (M1, M2, FSM)
- Les commandes-contrôle idem
C'est crucial pour la suite.
Marc
-
2
-
3
-
-
il y a une heure, BERNARD GAUTIER a dit :C'est vrai que si on devait se limiter au visible, les images du JWST seraient un peu rougeoyantes mais c'est dans cette intervalle où le pouvoir de résolution serait le meilleur sur tout le reste du spectre observable par le JWST. Il battrait Hubble sur cette partie du spectre observable aux 2 télescopes. D'après le calcul, dans l'orange (600 nm) le JWST aurait un pouvoir de résolution 2,7x supérieur à celui d'Hubble si on se limite à cette longueur d'onde. Corrigez-moi si je me trompe.
Oui, le rapport est bien 2.7 @600nm, rapport des diamètres.
D'ailleurs merci cela m'a permis de voir une erreur de copie de tableaux, corrigée depuis.
 il y a une heure, BERNARD GAUTIER a dit :
il y a une heure, BERNARD GAUTIER a dit :Après bien sûr si on prend l'intervalle du spectre de travail de JWST et en particulier l'IR moyen (vers 3-5 µm), son pouvoir de résolution serait équivalent à celui d'Hubble dans le visible.
Hm, non. L'intervalle 3-5 µm de JWST correspond à (3-5 µm)/2.7 = (1.1 - 1.9 µm) pour une résolution équivalente avec HST.
JWST 3 µm : 0.12 arcsec = HST 1.1 µm
JWST 5 µm : 0.20 arcsec = HST 1.9 µm
Comme tu le dis dans ton introduction, il y a un facteur 2.7 sur la résolution à une longueur d'onde donnée.
Prenons un domaine (0.4 - 0.7 µm) pour le 'visible' HST. On a la même résolution avec JWST sur (1.1 - 1.9 µm).
Mais tout cela c'est pour la résolution théorique. C'est pour cela que je parlais de Limite de Diffraction dans mes posts. Dans la pratique, chaque télescope est spécifié pour être limité par la diffraction pour une longueur d'onde donnée. En découle les budgets d'erreur sur le polissage, l'alignement, etc.
Hubble je sais pas mais j'imagine Diffraction Limit @0.5 µm (Spec : 70% Encircled Energy dans 0.1 arcsec). Et il était myope donc il a fallu lui mettre un Costar et adapter la camera (WFC2 puis WFC3), donc il y a de la perte en ligne.JWST c'est Diffraction Limit @2 µm. Donc à 0.6 micron il n'est pas limité par la diffraction., clairement.
Marc
-
2
-
1
-
-
il y a 58 minutes, Theta Coxa a dit :Sur le sujet de la combinaison ouverture/résolution/longueur d'onde, une vidéo pour les anglophones (Youtube propose aussi une solution de sous-titrage pour les malentendants et les anglophobes).
Le vidéaste aborde le sujet au travers d'expérimentations, et en vient au JWST.Didactique, merci
-
Pour ce qui est du calcul à la louche de @Superfulguret pour compléter mes posts sur le sujet un poil plus haut :
La réponse spectrale de Hubble WFC3 à 0.2 micron ne vaut rien :
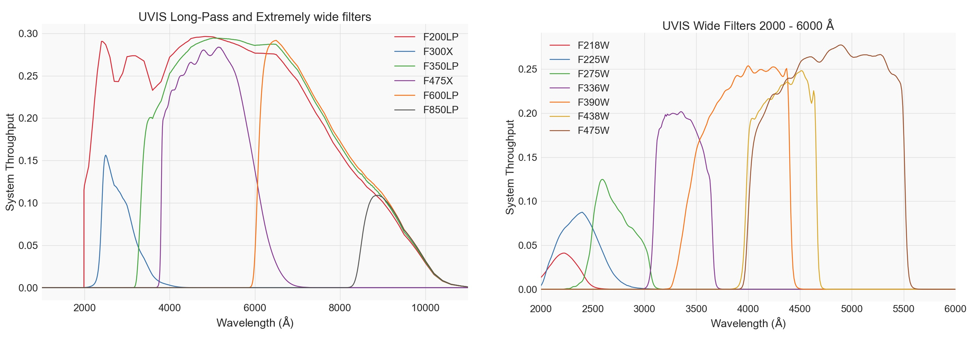
Disons que Hubble WFC3 commence à avoir un signal intéressant à partir de 0.4 micron.
Le capteur HgCdTe de NIRCam voie courte (0.6 - 2.3) ramasse un bon signal a 0.6 micron, voir aussi les sensibilités en fonction des filtres embarqués :

JWST voit bien dans le rouge a 0.6 micron, en début de bande (en fait le détecteur NIRCam short démarre à 0.4 microns, les filtres à 0.6 microns).
Ainsi, si on veut comparer les deux, dans le bas de leurs bandes mais avec du signal, prenons :
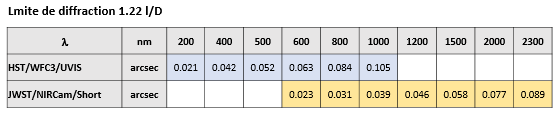
- Hubble WFC3 0.4 micron : 0.04 arcsec
- JWST NIRCam Short 0.6 micron : 0.023 arcsec
Marc
-
2
-
3
-
-
Le 09/01/2022 à 17:43, muller a dit :A quelle frequence doit on faire re-aluminer son miroir de telescope pour garder le maximum de reflexion?
Tout dépend de ce que tu nommes maximum de réflexion. Quels sont les besoins des astronomes amateurs ? Une baisse de 10% est-elle acceptable ?
Tout dépend si ton optique est en milieu fermé ou non, de son temps d'exposition à l’environnement, de l’environnement proprement dit (Température, humidité, condensation), etc.
Si tu sors le tube 20 fois l'an et qu'entre temps il est stocké emballé a l'abri : probablement jamais.
Dans le milieu pro on a souvent des workshops sur le sujet, car les technos évoluent. Un Miroir qui observe vers le haut presque toutes les nuits en Atacama, tu fais un re-coating au bout de 1.5 - 2 ans. Le même qui regarde vers le bas, tous les 3 - 4 ans. On le fait car la réflectivité baisse, mais qu'elle s'accompagne aussi d'une augmentation de la diffusion. Des que les astronomes commencent à gueuler, il est temps de le refaire
Des nettoyages réguliers permettent d'augmenter la longévité des traitements : un tas de polluants s'accumulent sur les traitements et ils sont sources de dégradation par réaction chimique.
Une petite discussion sur le sujet ici (en anglais, sorry) :
Marc
-
Il y a 7 heures, Superfulgur a dit :Intéressant... Je me pose cette question depuis des années, et n'ai jamais obtenu de réponses claires. Dans mes propres articles, j'ai toujours soutenu que la résolution de Hubble et de Zwicky (c'est le nom que j'ai choisi à la place du nom à la con de ce télescope) seraient identiques, soit 0.05'' à 0.1'' en fonction de la longueur d'onde et à la louche...
Or, depuis quelques années, on me fait remarquer que non, Zwicky résoudra bcp plus, puisqu'il descend jusque dans le rouge !!!
Si un vrai spécialiste de Zwicky pouvait répondre, de mon côté, les pros sont toujours évasifs sur cette question pourtant fondamentale...
Voir mon post juste un peu plus haut.
L''imageur NIRCam de JWST a deux voies :
- Short : 0.6-2.3 micron
- Long : 2.4-5.0 micron
L'imageur Hubble WFC3 a deux voies :
- UVIS : 0.2-1.0 micron
- NIR : 0.8-1.7 micron.
Si on calcule les limites de diffraction pour ces deux télescopes et pour ces bandes HST/UVIS et JWST/Short :
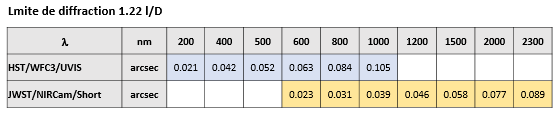
Marc
-
8
-
4
-
Bonnes nouvelles du JWST (James Webb Space Telescope)
dans Astronomie générale
Posté(e)
Il y a un 'Guide de Poche' qui résume NIRCam sur deux pages")
http://ircamera.as.arizona.edu/nircam/pdfs/NIRCam-pocket-guide.pdf
Marc