

vaufrègesI3
-
Compteur de contenus
14 271 -
Inscription
-
Dernière visite
-
Jours gagnés
22 -
Last Connexion
Soon available - 78578
Messages posté(e)s par vaufrègesI3
-
-
il y a une heure, bon ciel a dit :des voiture électriques j'en conduisais déjà en 1994
Pffff... petit joueur !..
Vers la fin des années 50 j'en conduisais déjà une régulièrement :

-
 1
1
-
 10
10
-
-
il y a 59 minutes, Achaim a dit :On va dire que l.humain est la seule bestiole qui essaye de comprendre
il y a une heure, Achaim a dit :il reste qd même très limité
Pour confirmation :

-
8
-
-
il y a 2 minutes, grelots a dit :Tu te fais du mal 😘
Là c'est bon, j'ai pris mes cachets, l'aurore peut péter je m'accroche
 ..
..
-
1
-
-
Il y a 7 heures, xavier2 a dit :tu entends quoi par "inquiéter"? il y a plein de sujets qui sont plus inquiétant en ce moment que le risque de voir des aurores.... Au pire t'as quelques satellites HS et ou transformateurs...
Oui.. et "HS" aussi accessoirement quelques centaines de vieux cons inutiles, déjà bien délabrés et souffreteux ..
Bon débarras
 !!
!!
-
 1
1
-
-
Il y a 2 heures, Alain MOREAU a dit :mais le concept même engendre des complications impossibles à évacuer d'un revers de manche optimiste :
En effet, une liste impressionnante et incompressible de problèmes à résoudre..
Car au delà des questions de rentabilité, c'est surtout cette notion même de "réutilisabilité" qui est au cœur de 90% des problèmes techniques..
Entre autres et par exemple, ne serait-ce que pour un seul HLS, il faudra solliciter entre 9 et 12 Starship ravitailleurs, lancés (et récupérés) en cadence effrénée, et remettre fissa l'ensemble en état de vol. À moins de disposer d'un "stock" considérable de lanceurs en réserve (plusieurs dizaines)... ce qui engendrerait un coût astronomique, complètement délirant. Aujourd'hui, honnêtement, même si des progrès sont probables sur ce lanceur, sur la fiabilité de sa protection thermique et la puissance de sa motorisation, c'est un pari qui semble assez fou à tenir, en tout cas dans les délais imposés pour "Artemis".
Bon... Pour Elon lui même... ne soyons pas trop inquiets, cet homme a su se bâtir des relations de très haut niveau, et au besoin elles pourront sans aucun doute jouer en sa faveur dans un proche avenir..

-
 2
2
-
-
La tentative de trajet plus direct (raccourci de 150 à 200 m) est finalement pleinement réussie !!
Le 27 mai Curiosity a continué à "plonger" en arc de cercle dans la dépression qui mène au canal, d’abord au Sud-Ouest puis au Nord-Ouest, rejoignant ainsi le tracé du trajet prévisionnel après plus de 38 mètres de parcours.
Cette nouvelle position doit permettre de juger de la nature (en bonne part incertaine) du terrain que le rover doit emprunter dans sa traversée vers le Sud puis vers l’Ouest et "Texoli "(voir ci-dessous). C’est à vérifier, mais nul doute que les pilotes vont être vigilants, même si ce n’est pas gagné d’avance !
Je cite Michelle Minitti, géologue planétaire :
"Au cours des derniers mois, Curiosity a grimpé régulièrement à travers les couches rocheuses de l'unité de sulfate supérieure. Bien que chaque étape ait comporté sa propre collection de blocs rocheux inclinés d'une manière ou d'une autre, on pourrait imaginer que chaque scène soit recomposée en un ensemble cohérent de couches, défaisant ainsi le travail que l'érosion et le temps ont accompli. À l'emplacement actuel de Curiosity, Gediz Vallis, le puzzle n'est pas aussi bien reconstitué. Le fond de la vallée est un mélange de différents types de roches, tout comme la crête qui remplit la vallée, et les roches sont comme les pièces que l'on trouve lorsqu'on ouvre un puzzle : des couleurs et des formes différentes qui, dans leur ensemble, donnent une image plus vaste. La tâche de Curiosity dans le plan d'aujourd'hui était de commencer à trier les pièces du puzzle pour continuer à construire l'image plus large, ou l'histoire géologique, de Gediz Vallis".
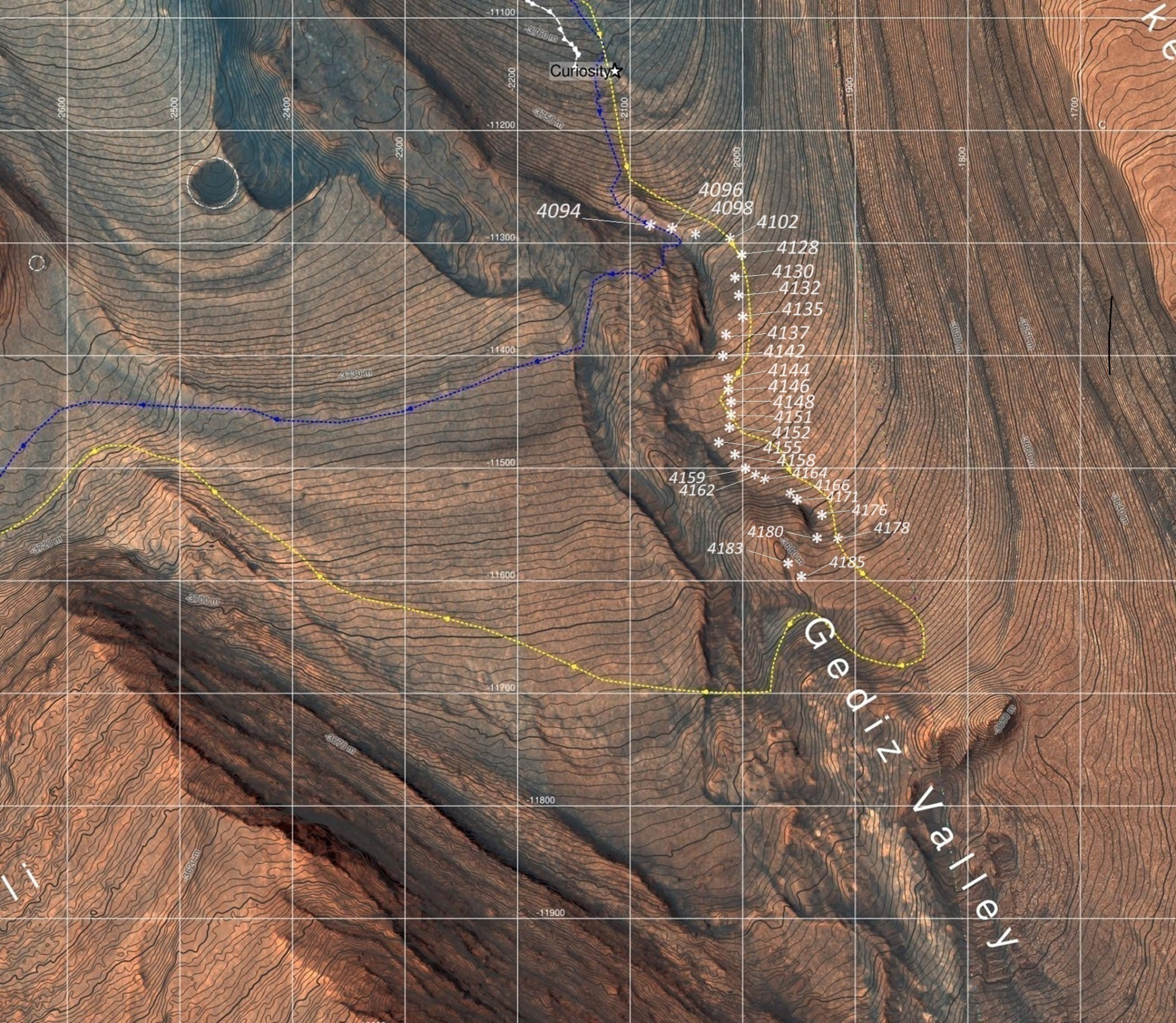
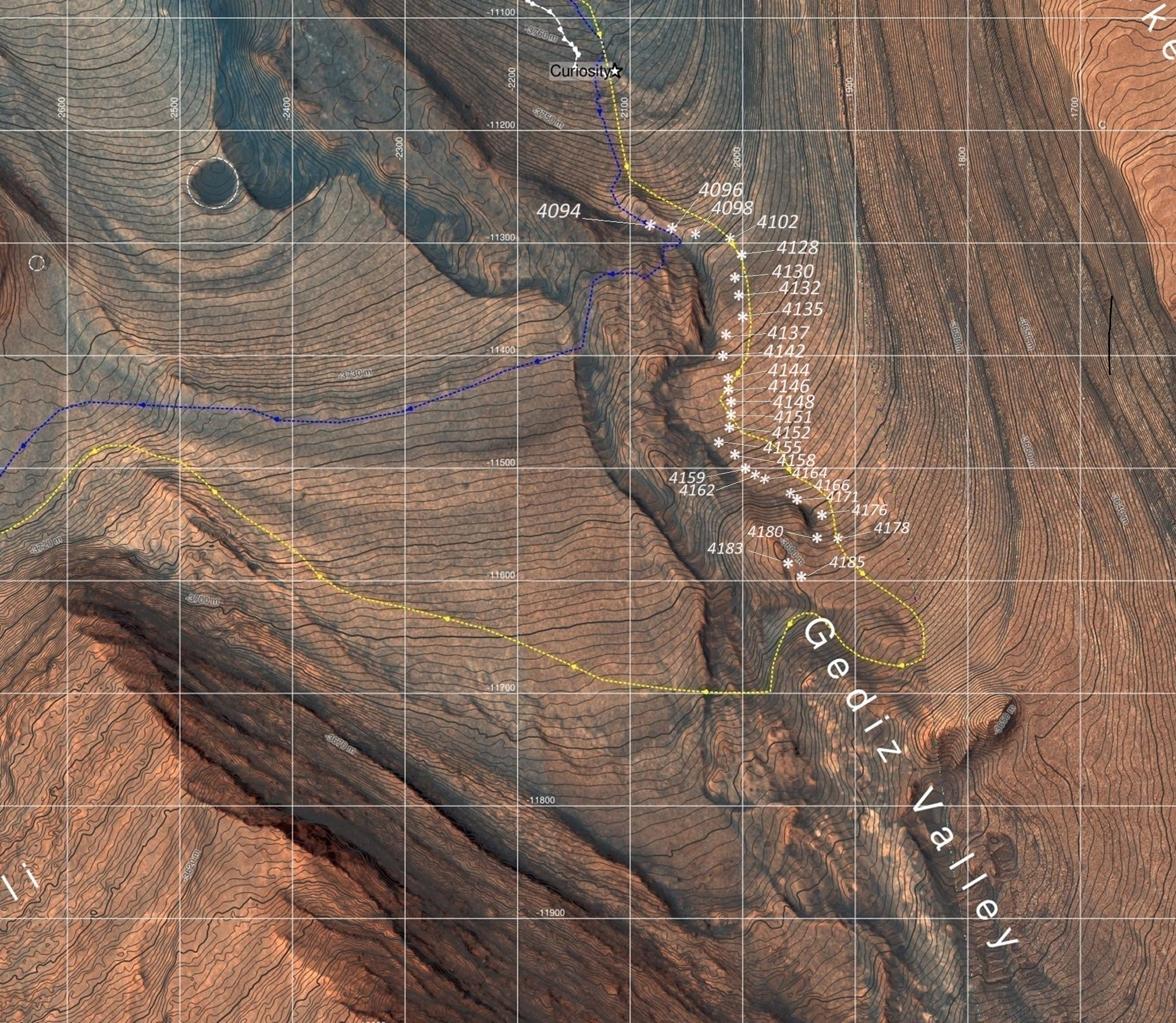
POSITION AU 27 MAI 2024 (SOL 4197) :

POSITION RELATIVE AU TRAJET PRÉVISIONNEL :
Astérisque JAUNE pour la position au sol 4197 (27 mai)

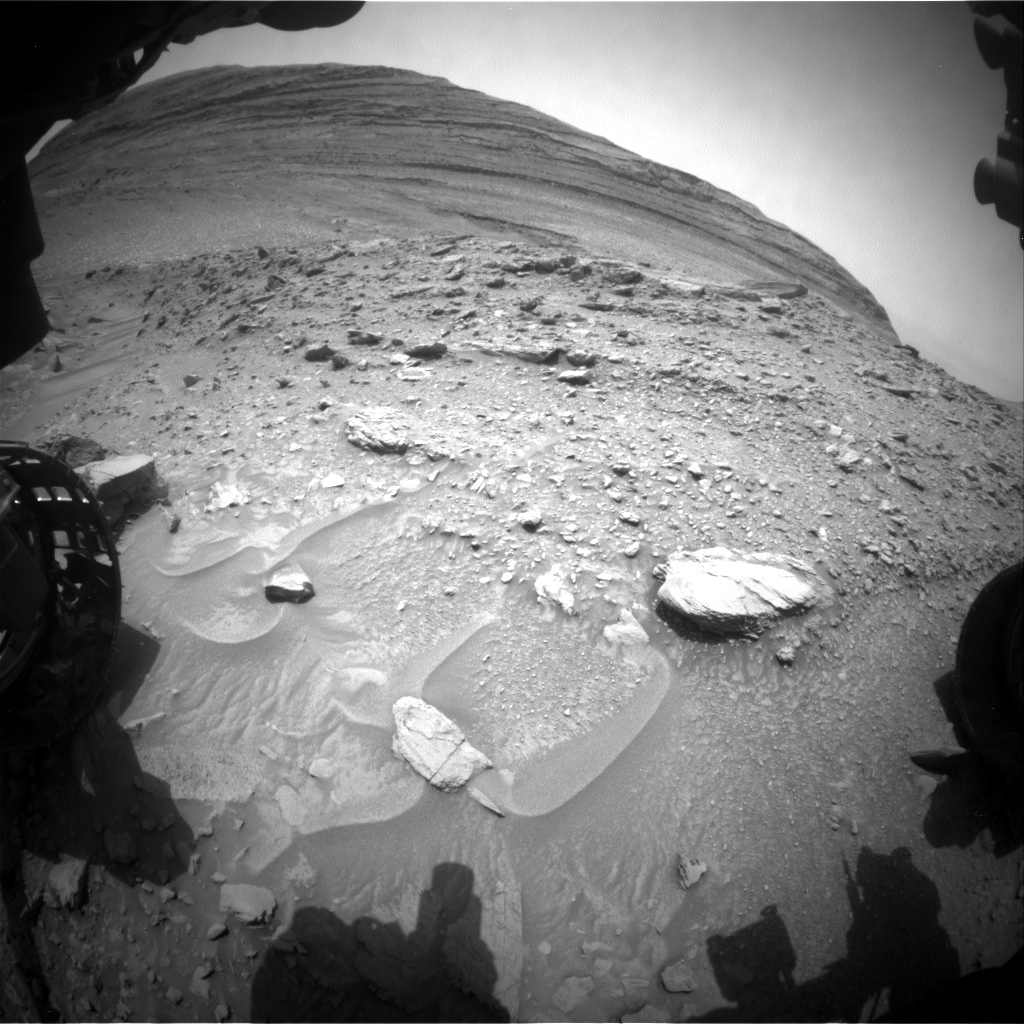
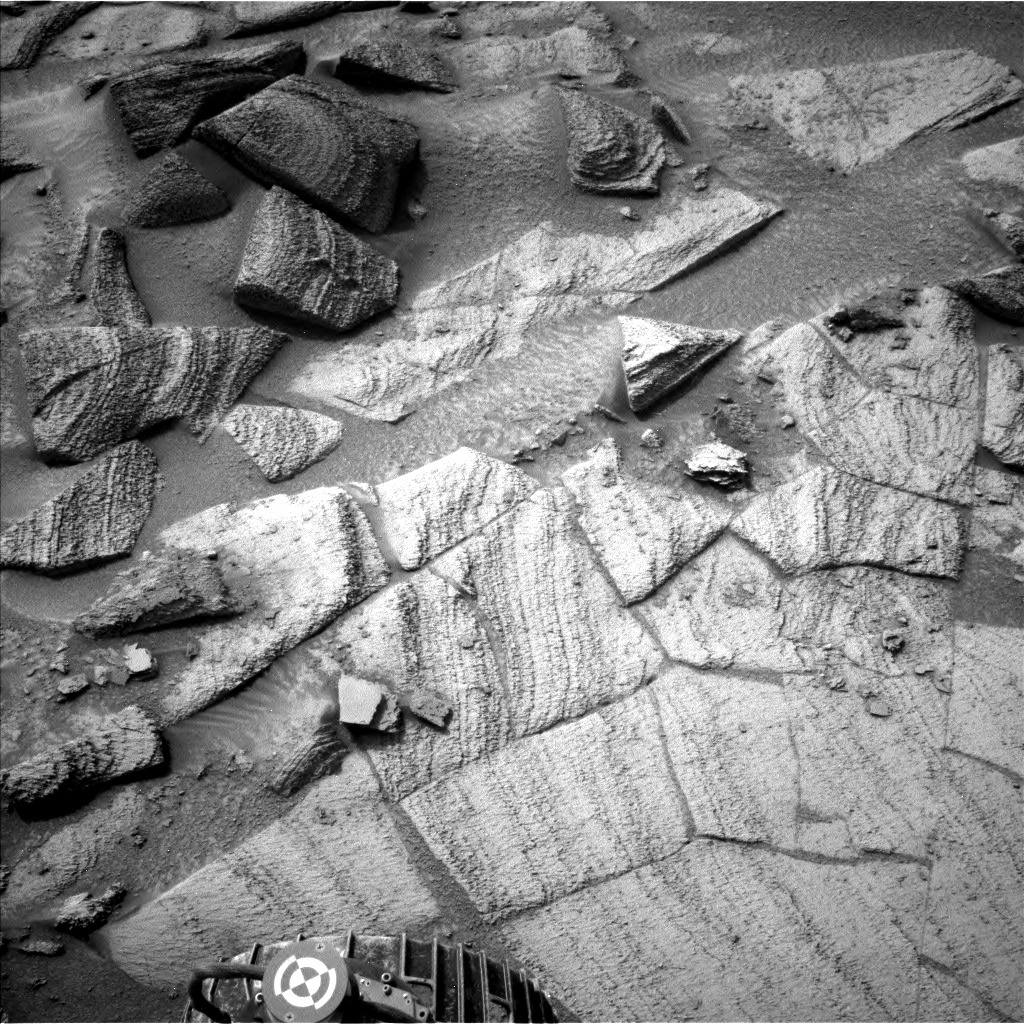
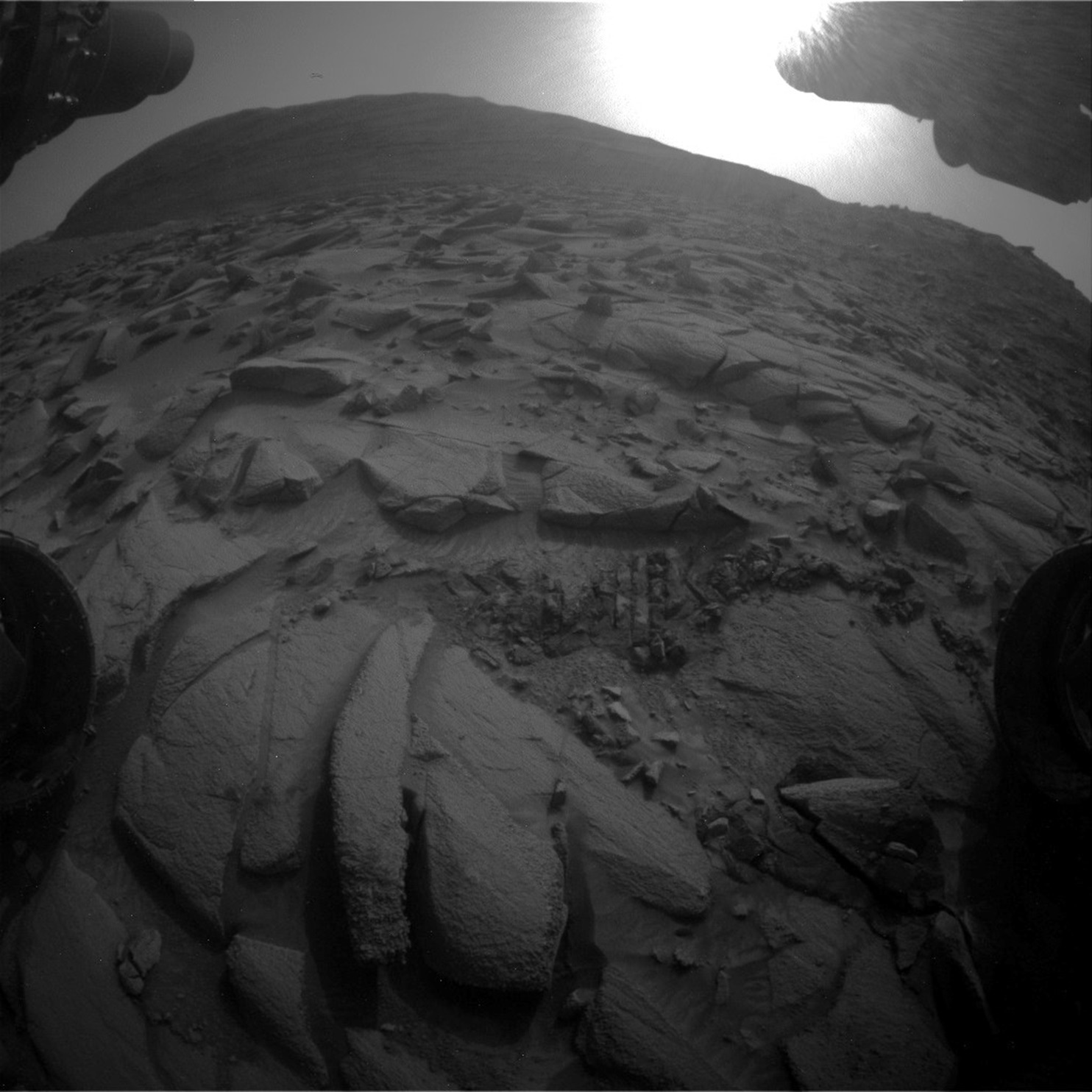
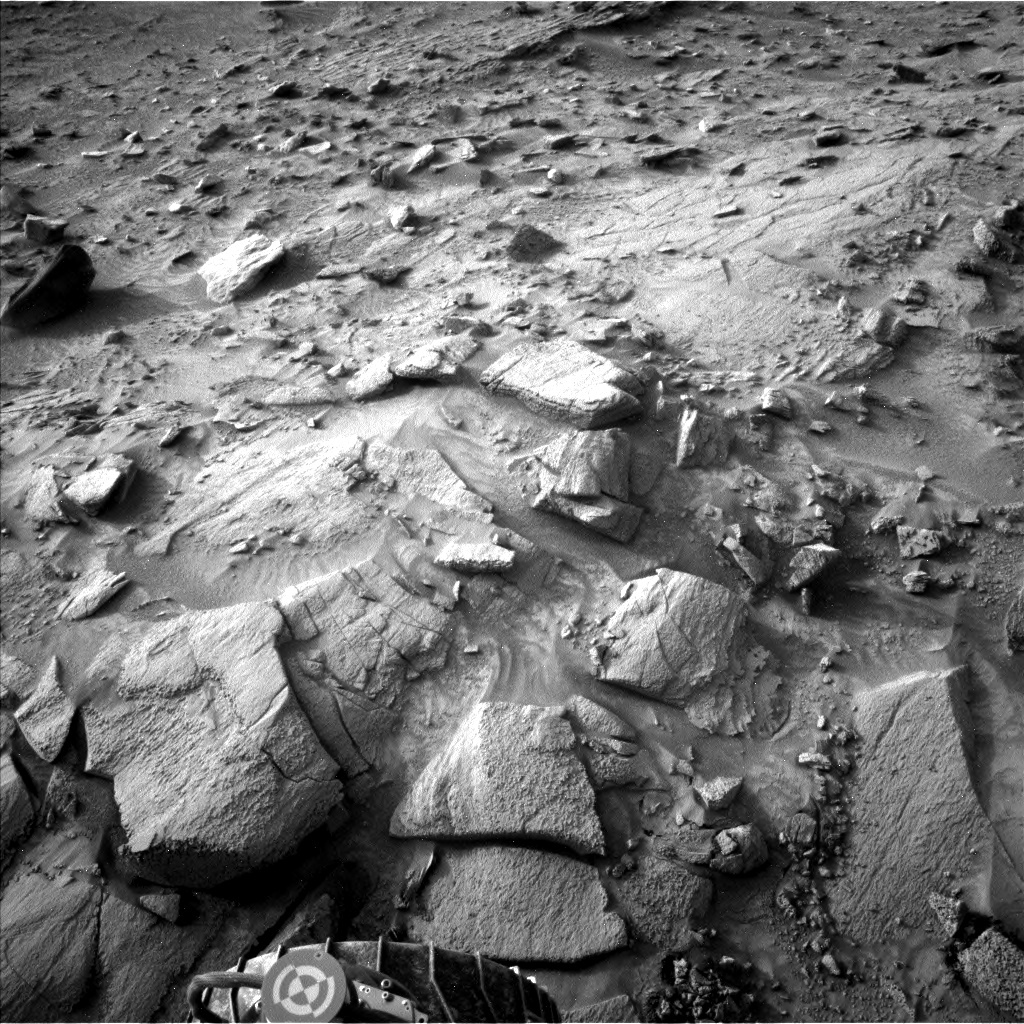
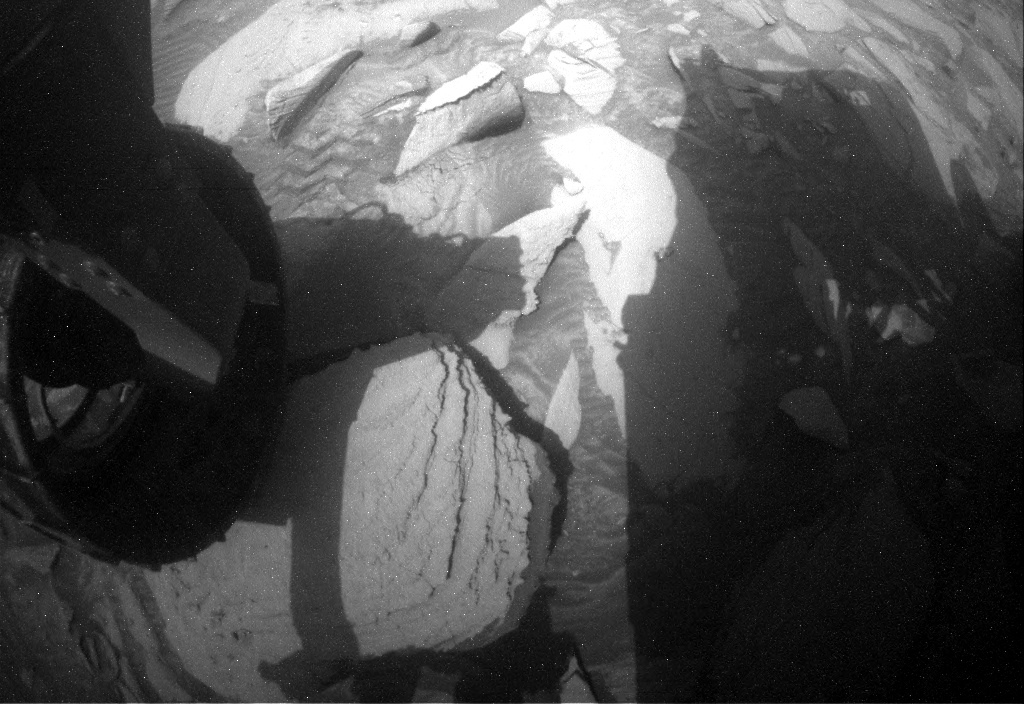
HAZCAM AVANT - 27 MAI 2024 (SOL 4197) :
Le canal est encore occulté en bonne part à gauche de l'image, là où le rover doit le traverser

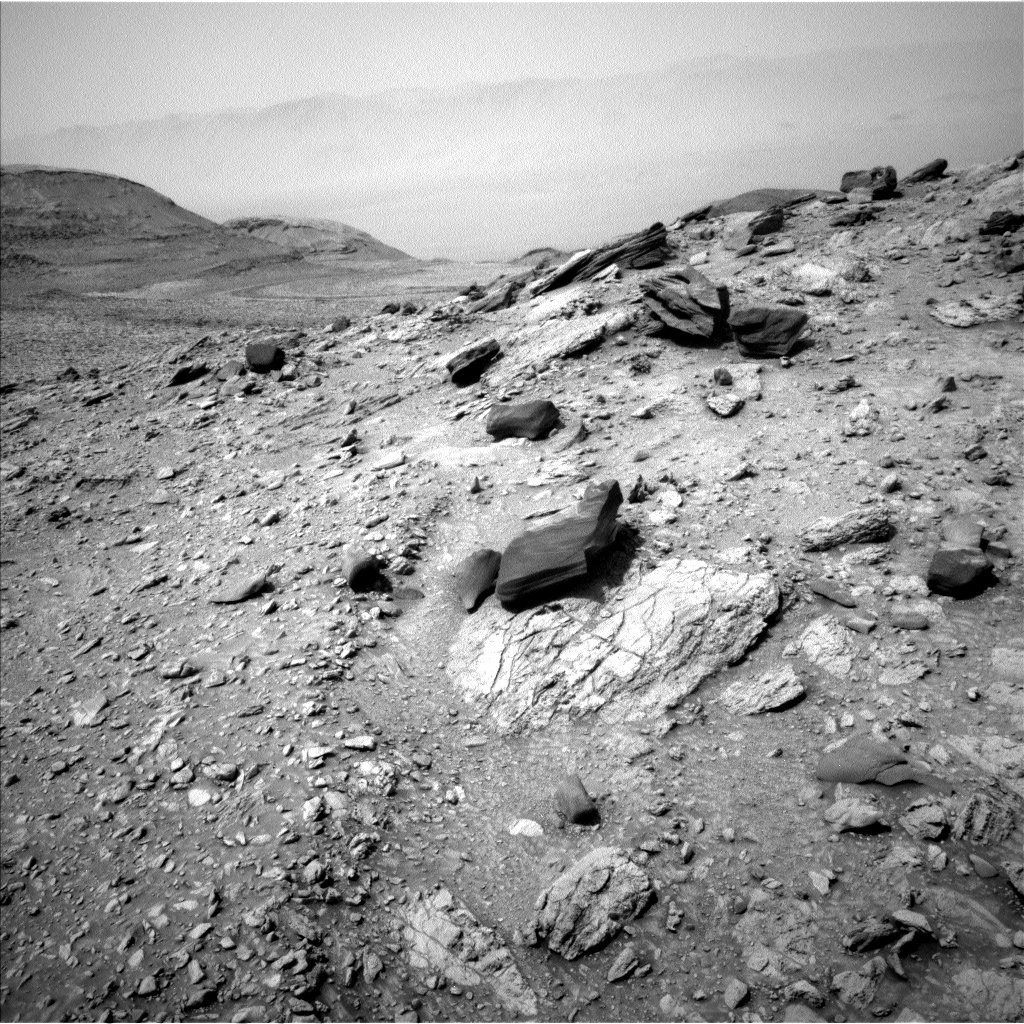
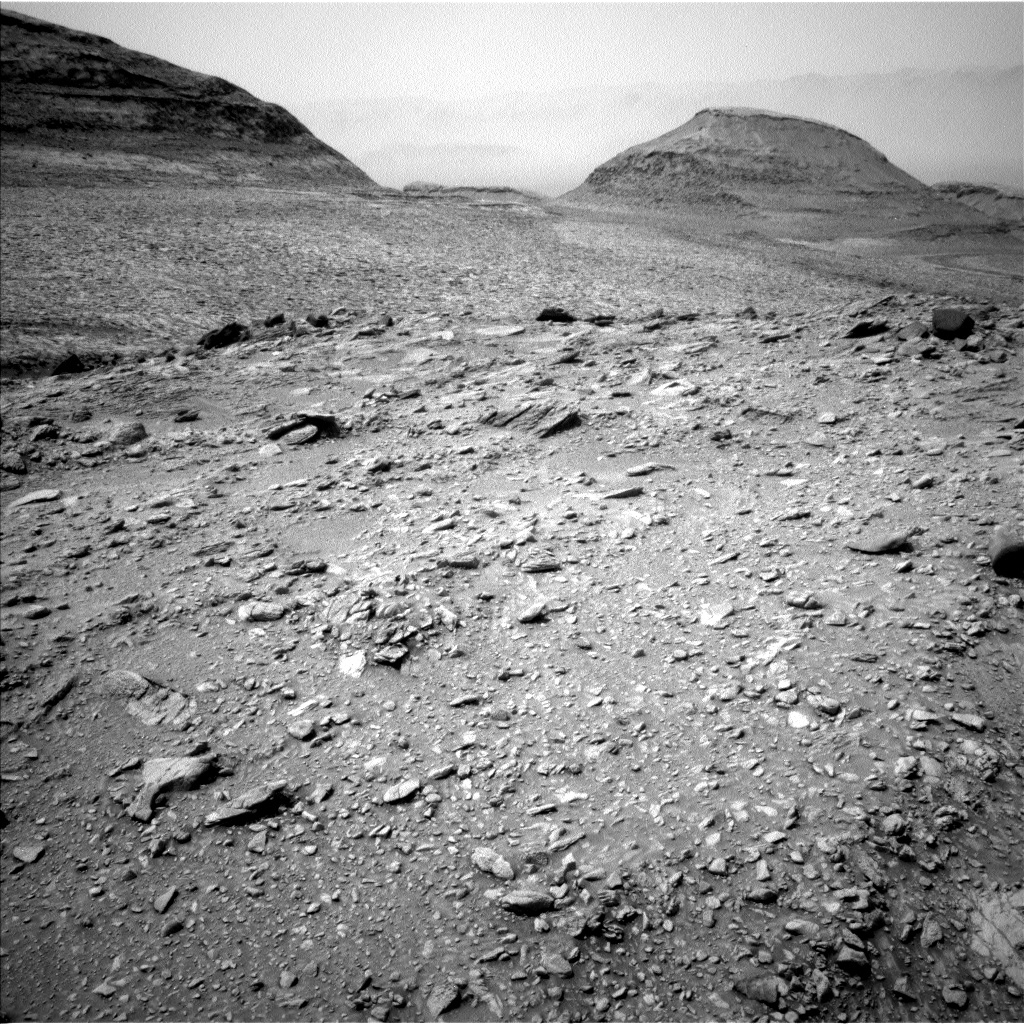
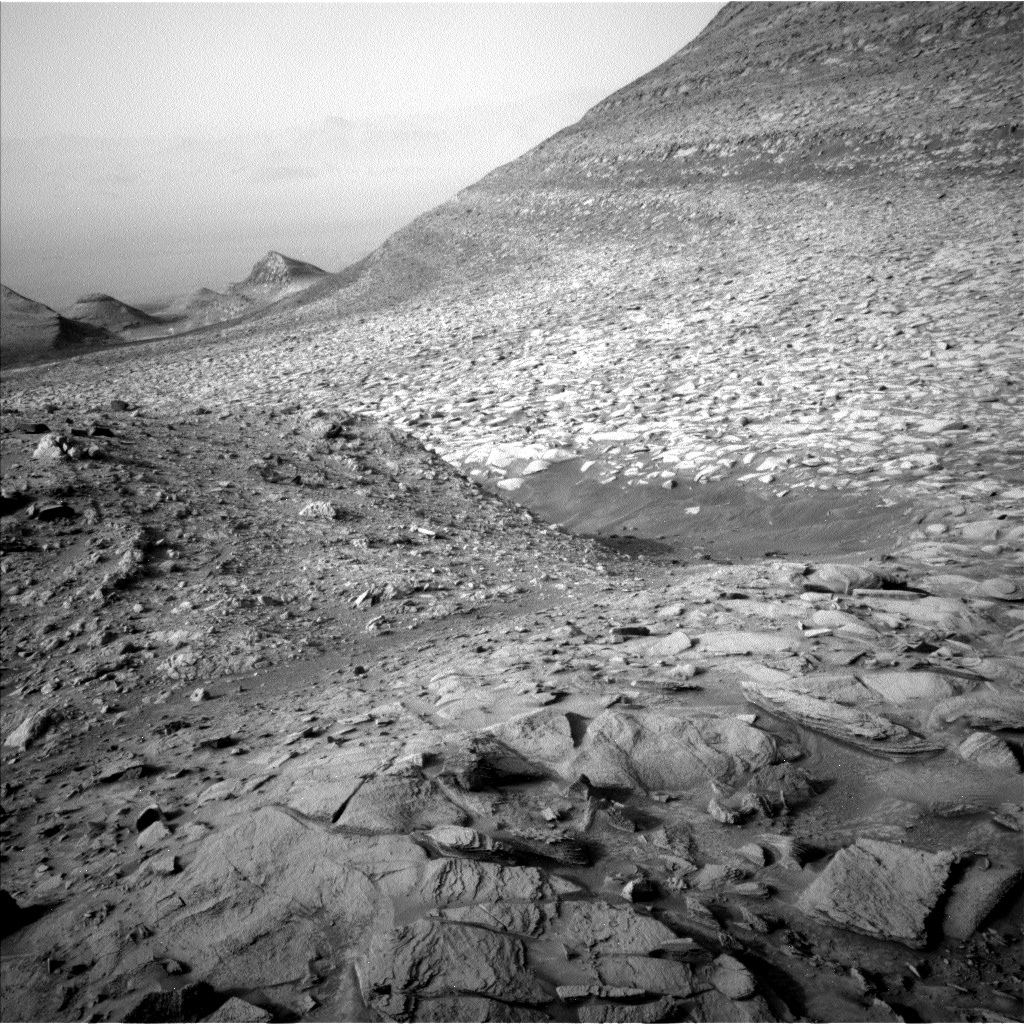
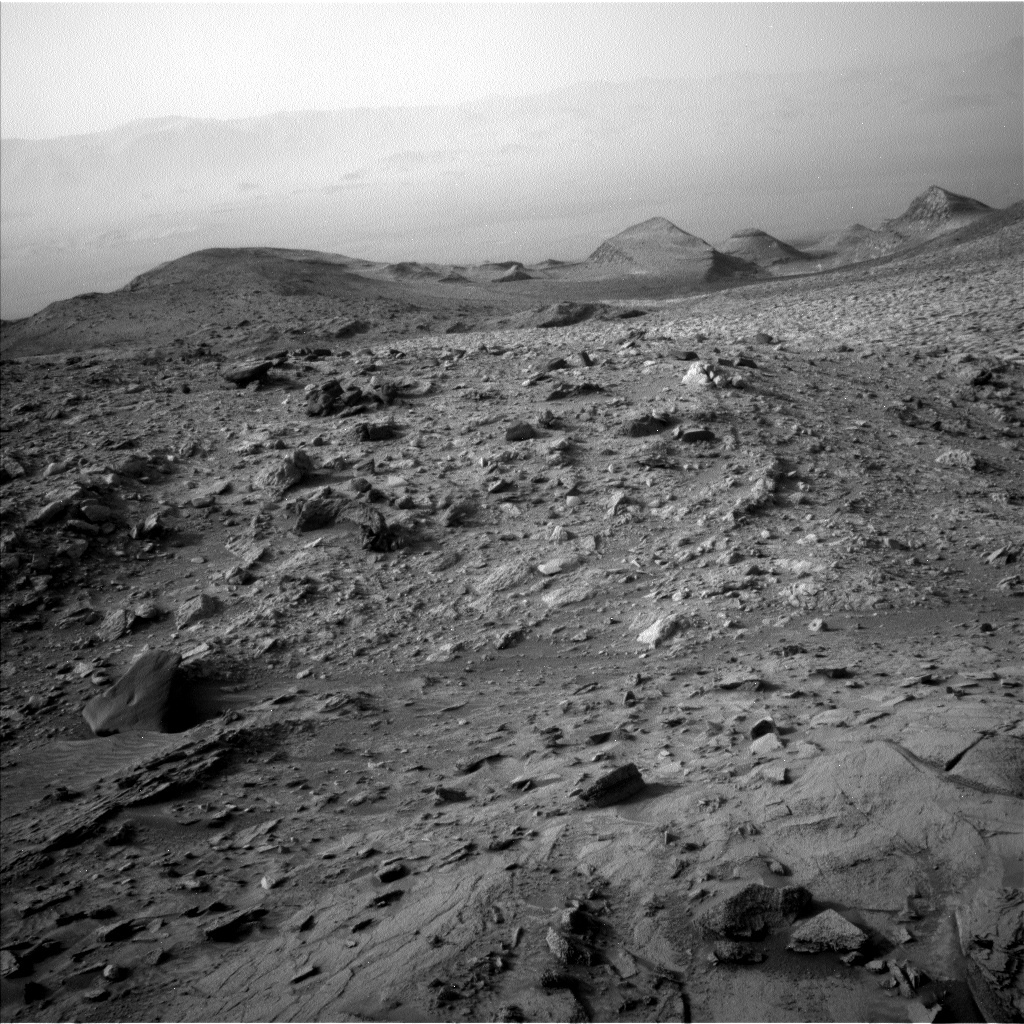
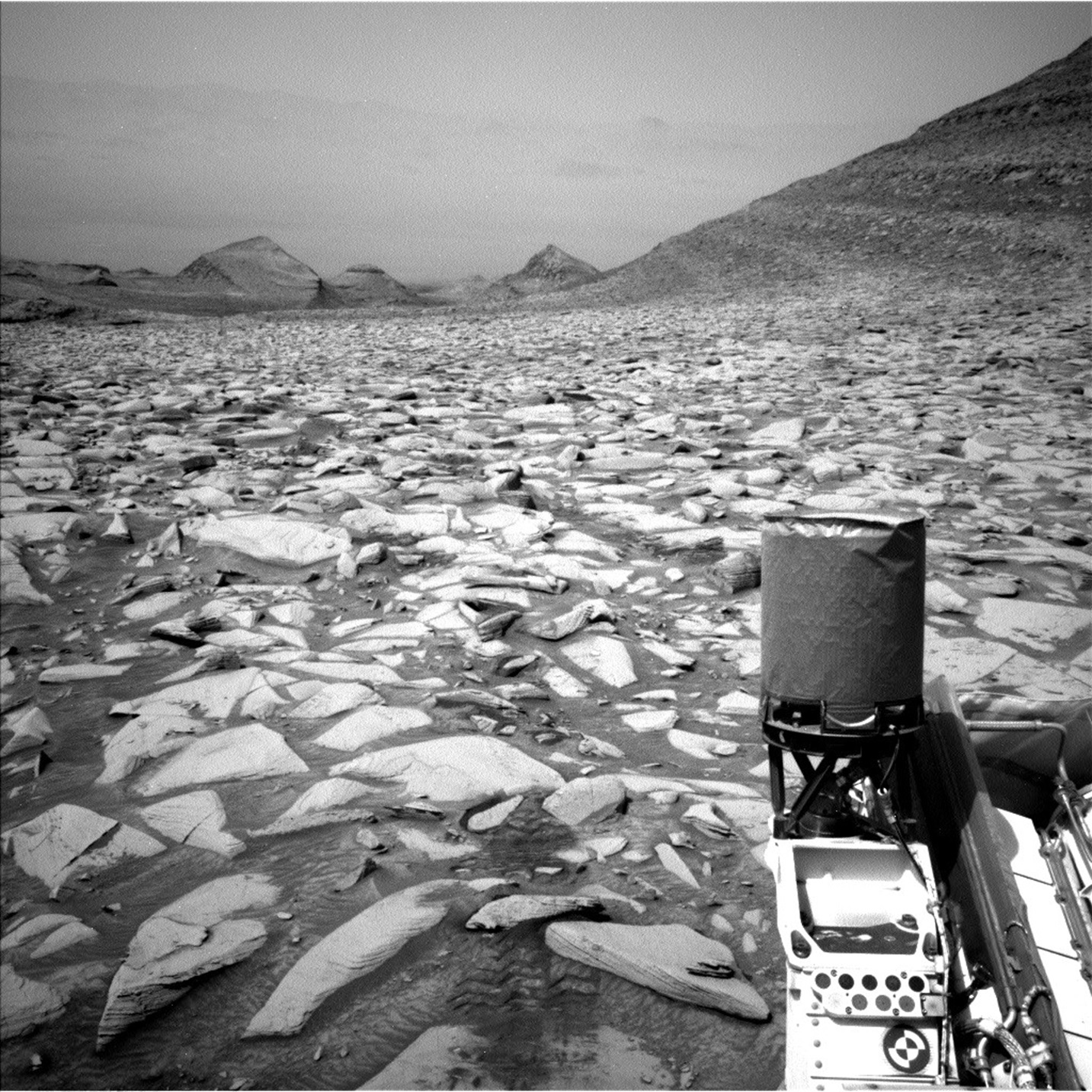
NAVCAM - 27 MAI 2024 (SOL 4197) :
Très peu d'affleurements rocheux

Noter sur ces deux images les traces de roues en arc de cercle en descente derrière le rover


On approche du canal que Curiosity devrait encore longer direction Sud sur sa bordure Ouest parsemée de pierres blanches

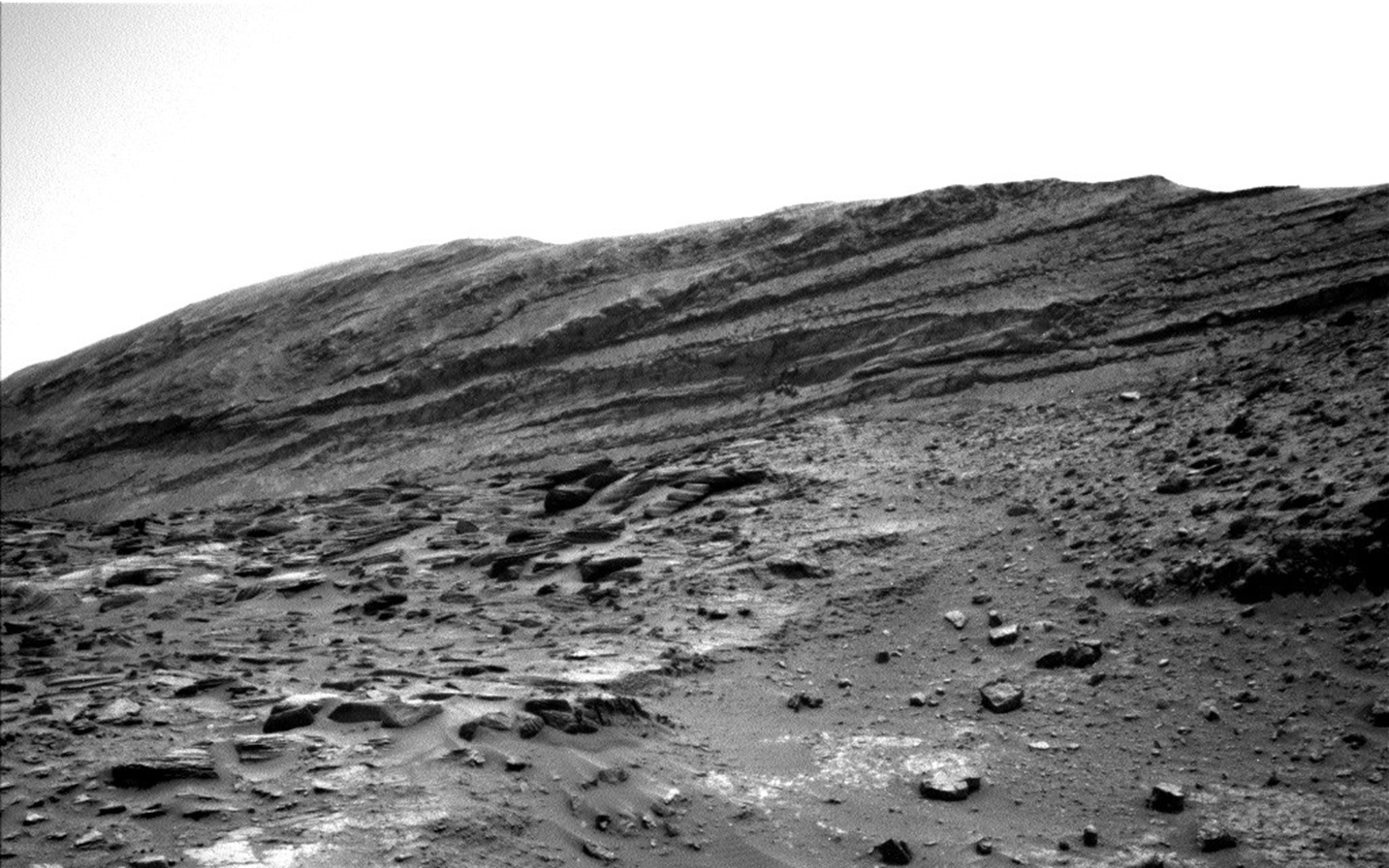
Vers le Nord et la bordure rocheuse de la dépression dans laquelle Curiosity s'est engagé pour franchir le canal
Au loin apparait encore la butte "Orinoco" - à droite les contreforts de "Kukenan".

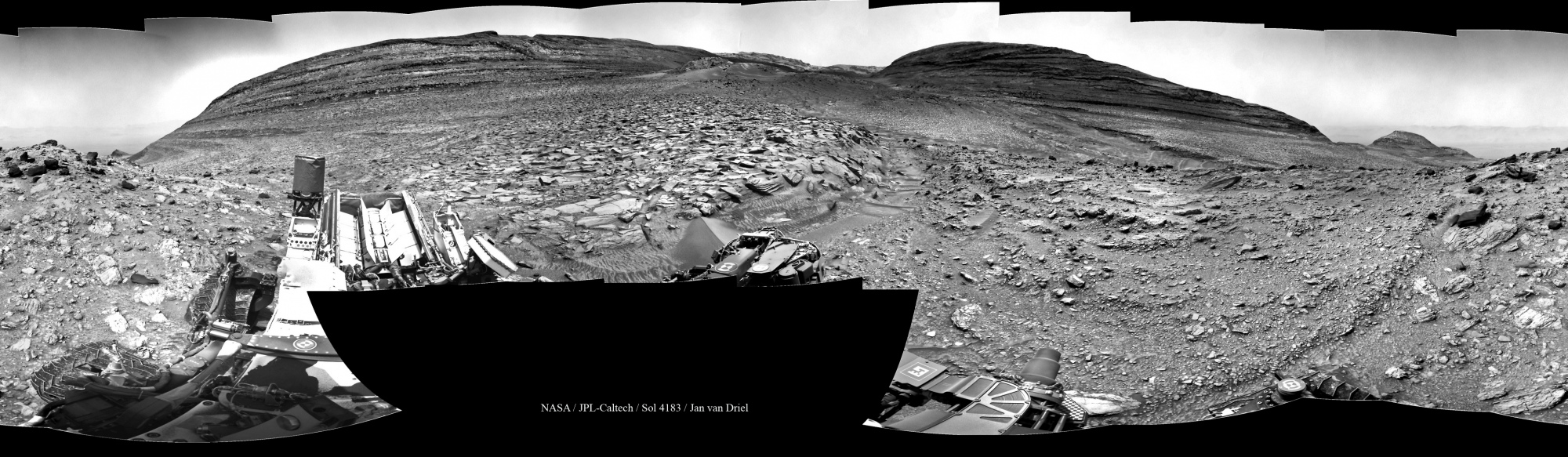
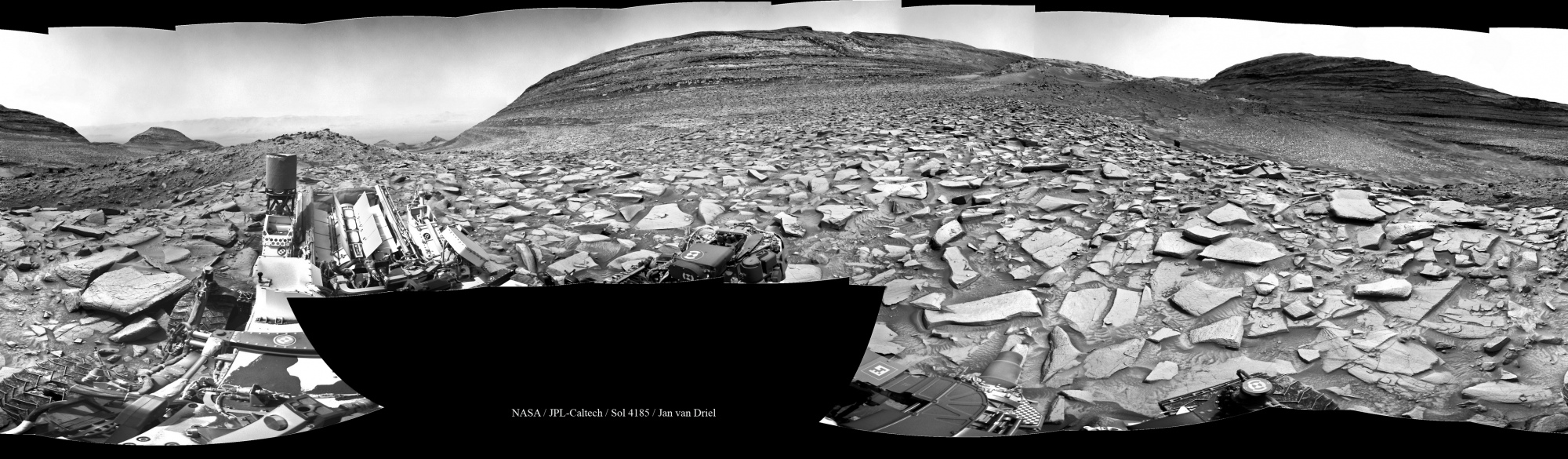
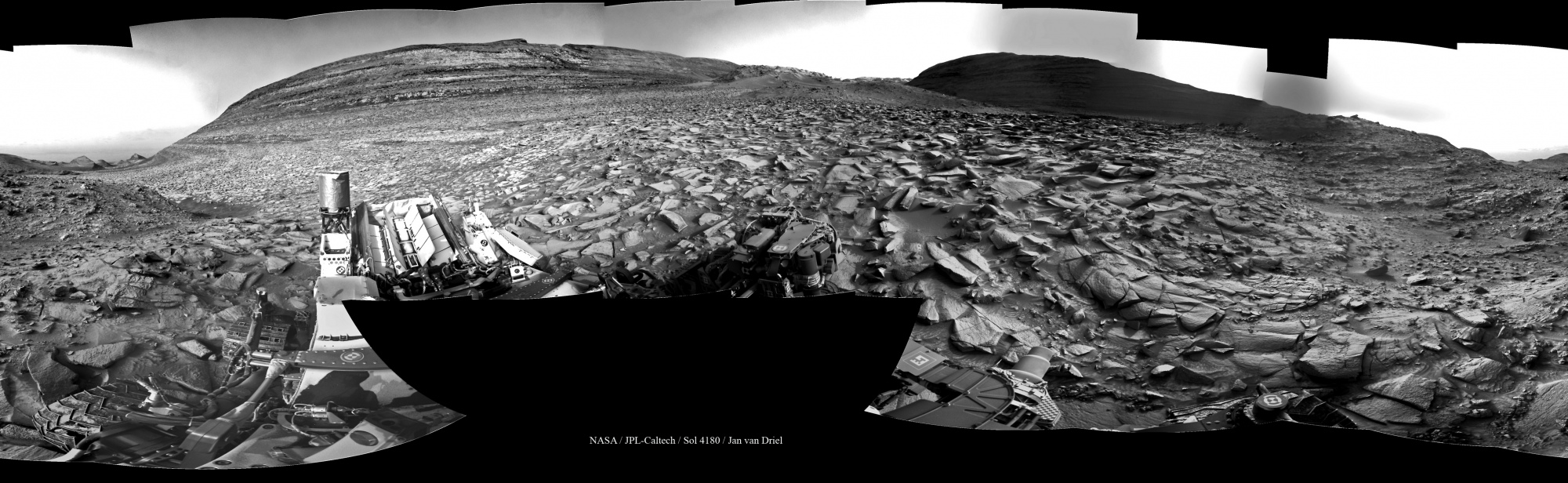
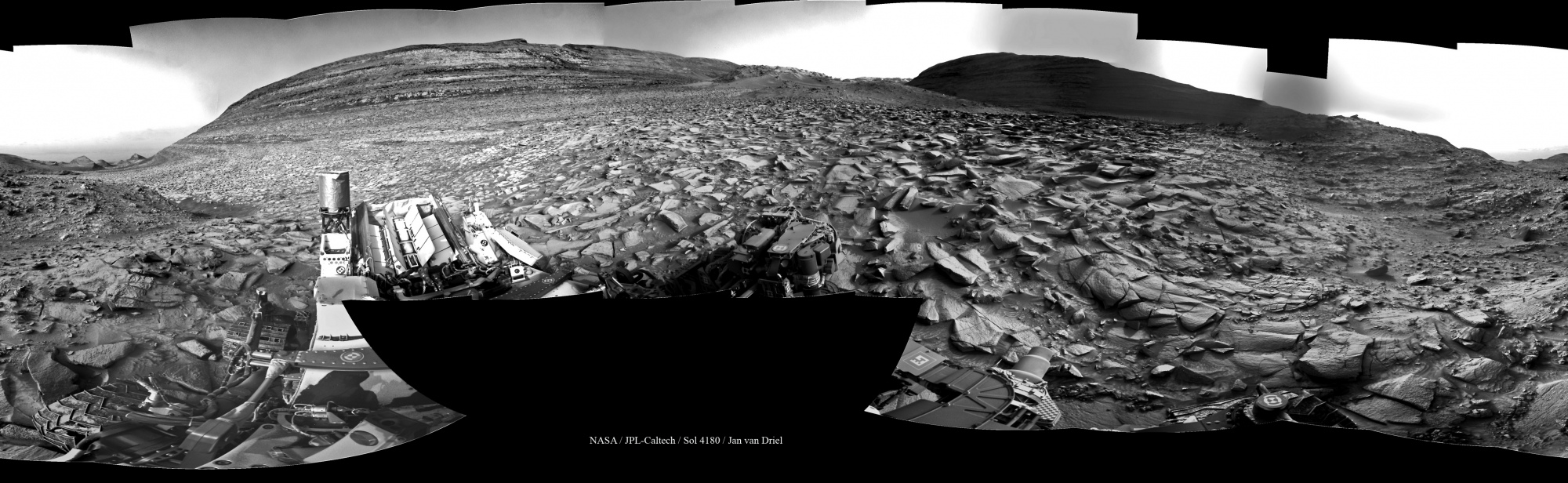
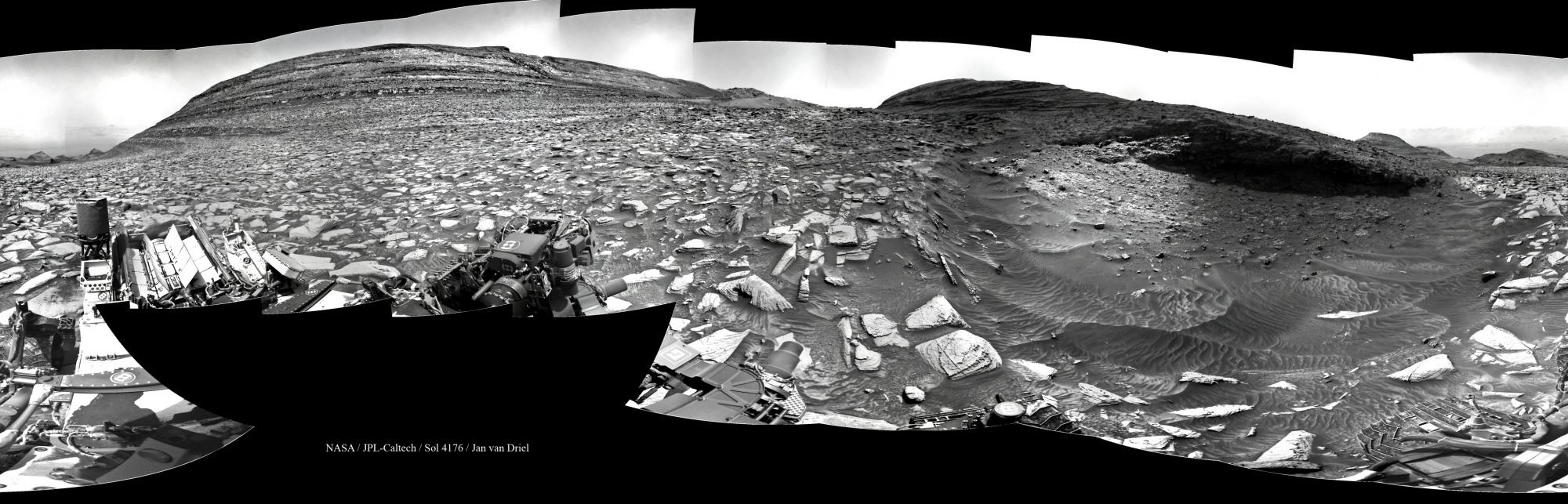
PANOS NAVCAM - 27 MAI 2024 (SOL 4197) – Jan van Driel :

MOSAÏQUES MASTCAM - 21 MAI 2024 (SOL 4191) - Neville Thompson :

-
1
-
 2
2
-
-
il y a 15 minutes, Philippoïde a dit :Y z'ont rien sur la courante ?

Sur cette étude et ce point précis, rien de concret à l'échelle des éruptions solaires sur Terre, mais à vérifier.
Par contre durant un vol spatial les éruptions solaires et/ou le rayonnement cosmique constituent l'un des principaux risques pour la santé. Déjà le danger réside dans le fait que ce rayonnement émet suffisamment d'énergie pour modifier ou briser les molécules d'ADN, ce qui peut endommager ou tuer des cellules. Il peut en résulter des problèmes de santé aigus ou à long terme.
C'est à ce niveau que peuvent intervenir des signes tels que diarrhées, nausées et vomissements.
-
2
-
-
il y a une heure, grelots a dit :Ca serait vraiment chouette à 15 jours d’intervalles

Oui oui... pfffff... c'est trrrès beau les aurores.. OK...
.... mais perso bizarrement je ne me sentais pas très en forme ces derniers temps
 .
.
Tu m'étonnes ! :
Extraits - je cite :
"Un effet quasi-immédiat"
Pour évaluer l’impact de l’activité solaire et géomagnétique sur les problèmes cardiovasculaires, les chercheurs ont suivi 809 hommes âgés de 74 ans en moyenne et ils ont effectué des mesures répétées sur leur activité cardiaque.
Et lors des perturbations géomagnétiques intenses dues à des tempêtes solaires, les chercheurs ont obtenu des résultats surprenants.
Ils expliquent qu’ils ont observé "un effet quasi immédiat". "Il s’agit de la première étude à démontrer les effets indésirables potentiels de l’activité géomagnétique sur la fréquence cardiaque."
Des données qui confirment des précédents travaux
Ces résultats viennent confirmer les données de précédents travaux, publiés en 2019 dans la National Library of Medicine.
Dans cette étude, les chercheurs affirmaient que les perturbations électromagnétiques induites par l’activité solaire augmentaient le risque de mortalité et le risque de problèmes cardiovasculaires.
Une vaste étude épidémiologique dans 263 villes américaines a alors été mise en place afin de déterminer les effets des tempêtes solaires sur les décès, les maladies cardiovasculaires, les infarctus et les AVC.
"Nous avons trouvé une association significative entre les tempêtes solaires, les décès et les problèmes cardiaques, mais pas pour les AVC."
Il serait donc intéressant d’étudier le phénomène sur les femmes et les personnes jeunes, entre autres et de compléter les données déjà existantes.
FIN DE CITATION
Veillez donc modérer votre enthousiasme SVP, un peu de compassion... pitié pour les vieux quoi
!
D'autant qu'on déjà d'autres problèmes
 :
:

-
2
-
6
-
-
il y a une heure, Alain MOREAU a dit :voici à quoi me fait penser l'érection de cette paupière géante
Il faut surtout considérer ça sous l'angle de l'écologie : l'essentiel de toute érection c'est qu'elle soit en développement durable.
-
1
-
1
-
-
En définitive, l’équipe du rover semble "tenter le coup" du raccourci et ainsi de poursuivre la route en dirigeant Curiosity dans la dépression (formée sans doute originellement par le canal) qu’il aurait dû contourner totalement dans le cadre du trajet prévisionnel.
Reste à vérifier à quel endroit exact la traversée du canal sableux sera effectuée, aucune image ne donnant encore une idée précise de ce point de passage possible. Curiosity va sans doute devoir se diriger sensiblement vers le Sud-Ouest pour le découvrir, mais difficile de deviner les intentions exactes des pilotes du rover du fait de la part d'improvisation induite par tous les paramètres qui doivent impacter leur décision.
Le 23 mai Curiosity a donc roulé prudemment environ 10 mètres en "plongeant" dans cette large dépression. On peut constater que le terrain est ici très différent de celui très rocailleux que le rover a connu depuis son entrée dans la vallée. Peu d’affleurements rocheux, et beaucoup de roches noires typiques, posées au sol, regroupées ou non, le plus souvent clairsemées et, semble-t-il ici, transportées postérieurement par projection.
POSITION AU 23 MAI 2024 (SOL 4193) :

POSITION RELATIVE AU TRAJET PRÉVISIONNEL :

CONTEXTE :

HAZCAM AVANT - 23 MAI 2024 (SOL 4193) :
Changement de décor - noter l'omniprésence des roches sombres

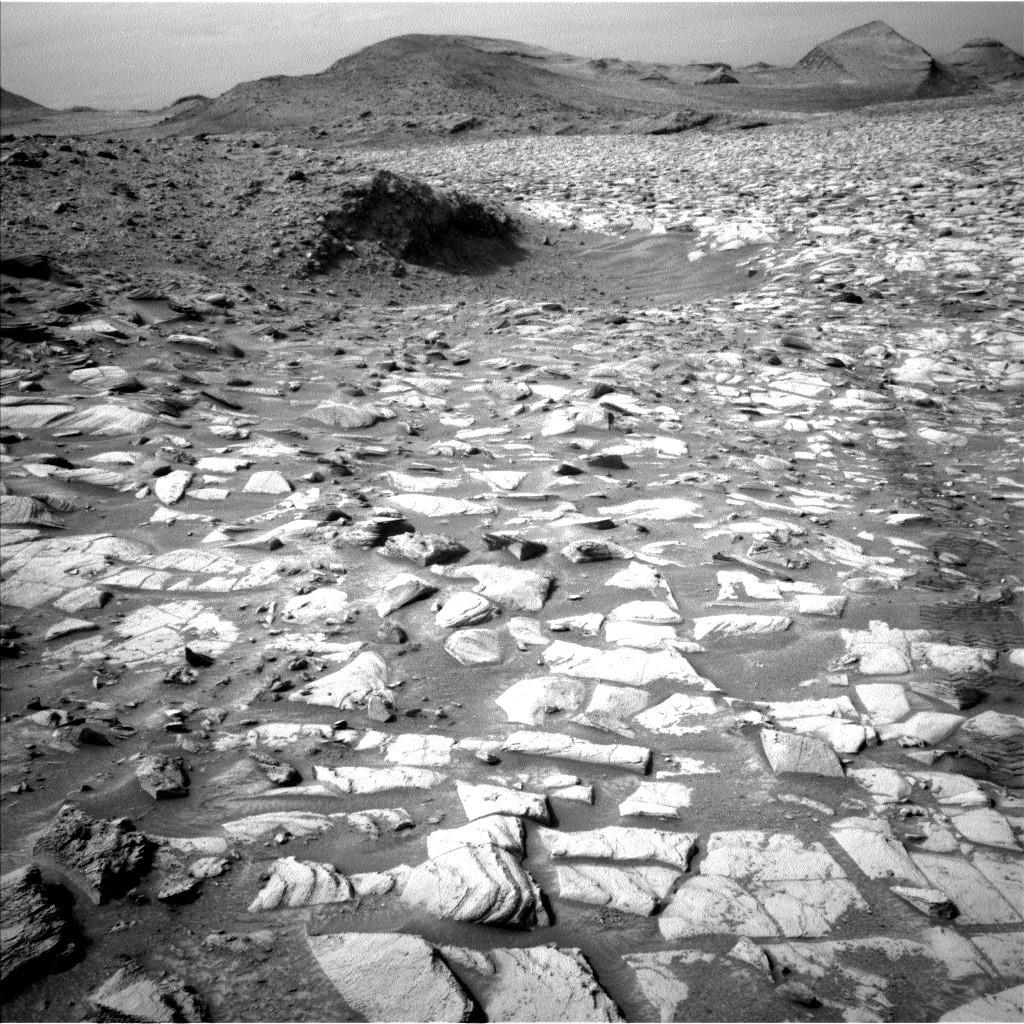
NAVCAM - 23 MAI 2024 (SOL 4193) :

Faible quantité d'affleurements rocheux dans "l'espace de travail"

Noter la "rupture" de nature du terrain dès l'entrée dans la dépression

Rupture confirmée ici

Vers l'Ouest et la destination du rover : au loin le passage entre "Texoli" (en haut à gauche) et "Wilkerson" (au centre en haut de l'image) - Plus bas on distingue le canal qui surgit derrière la crête

Le canal au centre de la dépression et de l'image, puis caché par le relief à gauche

Plus au Sud, la crête qui surplombe et occulte la dépression et le canal

PANOS NAVCAM - 23 MAI 2024 (SOL 4193) – Jan van Driel :

Extrait du pano plein Sud vers l'extrémité de la vallée, et gros plan sur le relief qui domine la dépression et le canal, avec son chaos de roches sombres, comme "plantées" sur le sol martien

-
2
-
4
-
-
Il y a 11 heures, serge vieillard a dit :l'instant de décision approche, tournera-tournera pas ?
cela étant, je trouve que de visu, ce passage me semble tout autant scabreux que les possibilités offertes les semaines précédentes où le bras de sable à traverser semblait bien moins large. Quitte à faire le détour, yaka l'assumer jusqu'au bout - je pense....
Salut Serge
") .. en passant chapeau bas pour tes dessins incroyables, entre autres ceux concernant les aurores !..
.. en passant chapeau bas pour tes dessins incroyables, entre autres ceux concernant les aurores !..
Oui, sur le choix définitif du parcours, on devrait être fixé très bientôt en effet car il semble assez compliqué de trouver un trajet plus court et plus direct vu les difficultés du terrain révélées par les images. À vérifier..
Les plus grands ennemis des déplacements du rover, ce sont les champs de roches pyramidales pointues et cimentées dans le sol (les fameux "dreikanters")... et bien sûr le sable martien..
Pour mémoire, ci-dessous images de l'aller-retour dans "Hidden Valley" début août 2014 (sol 717), un point de passage choisi afin d'éviter le plus possible les roches pointues.. Curiosity avait failli y terminer totalement ensablé, l'horreur ! La marche arrière avait été très très laborieuse (et pourtant en pente douce) :


Pourtant les spécialistes du Jet Propulsion Laboratory avaient procédé à de longs essais sur Terre dans les dunes du désert de Mojave. Le modèle utilisé dans ces opérations avait été allégé de manière à ne peser sur Terre que 0,38 fois le poids du rover réel sur Terre, donc le poids de Curiosity sur Mars :


Même sur de fortes pentes, ces essais s'étaient révélés plutôt concluants !.. Sauf que le sable martien semble bien avoir des propriétés différentes puisqu'il n'a cessé de poser des problèmes tout au long du parcours du rover.
Ainsi, même si les images nous rappellent souvent des aspects familiers de notre propre Terre, quelque part ce monde lointain s'acharne à nous être profondément et viscéralement hostile, voire.. interdit
.
Il y a 11 heures, serge vieillard a dit :Ces vues arrières sont fascinantes, points de vue gagnant en altitude et montrant les paysages connus sous un autre aspect
À ce jour Curiosity a parcouru près de 32 km, et s'est élevé de 826 mètres depuis son point d'atterrissage à "Bradbury Landing".
Il y a 11 heures, serge vieillard a dit :Reste à découvrir ce qui va se passer à l'avant une fois la nouvelle direction prise....
Il nous reste à découvrir bien d'autres aspects de Mars et de ses paysages. Surtout, la perspective deviendra totalement différente en progressant vers l'Ouest et j'en salive d'avance
 .
.
Il existe aujourd'hui vraiment beaucoup d'opportunités d'être consterné par l'actualité. Nous subissons en permanence l’injonction d’une société qui tend à nous encadrer totalement et parfois nous ligote, qui nous pousse sans cesse à être plus efficaces, toujours plus performants.
Dans ce cadre et depuis l'enfance beaucoup ont perdu peu à peu leur capacité à s'émerveiller sur bien des aspects que nous offrent l'art, la science, la nature, la littérature.. tout ça pour tenter d’affronter et maîtriser le monde dans lequel on avance et suite à l’expérience du conflit, de la responsabilité, de la fragilité de notre existence.
Dans le monde des adultes autour de moi, quand il peut m'arriver (incidemment
 ) d'évoquer les rovers martiens, je rencontre le plus souvent l'ignorance, l'incrédulité, mais surtout une totale indifférence..
) d'évoquer les rovers martiens, je rencontre le plus souvent l'ignorance, l'incrédulité, mais surtout une totale indifférence..
Qu’est devenu le petit enfant qui savait s’émerveiller devant la poussière qui dansait dans des raies de lumière, ou devant une fleur au printemps, un avion dans le ciel, un enfant qui se pose tellement de questions qu'il a du mal à s'endormir
?
Un enfant est capable de s’enthousiasmer avec intensité et concentration toutes les 2 à 3 minutes.. alors que le plus souvent un adulte s’enthousiasmera avec la même intensité 1 à 2 fois...par an !
Il parait selon certaine philosophie que “l’émerveillement est une faculté poétique qui se décide”.
Pour moi c'est fait !
-
7
-
8
-
-
Il y a 9 heures, Kirth a dit :des spationautes tourner comme des hamsters
"Hamsters dame"... j'adore !

-
3
-
-
Le trajet de Curiosity s’est prolongé sur 3 nouvelles étapes longeant le canal et la crête Gediz Vallis. Le rover est désormais quasiment "sur" la crête et s'est positionné sur la berge du canal ensablé... pour le traverser ??...
- 10 mètres le 17 mai (sol 4187)
- 27 mètres le 20 mai (sol 4190)
- 30 mètres le 21 mai (sol 4191)
L’équipe du rover cherche très probablement à éviter de suivre la longue boucle de contournement du trajet prévisionnel en "coupant" au plus court (voir images ci-dessous).
POSITION AU 21 MAI 2024 (SOL 4191) :

POSITION RELATIVE AU TRAJET PRÉVISIONNEL :

PREMIÈRE ÉTAPE du 17 MAI :
HAZCAM AVANT - 17 MAI 2024 (SOL 4187) :

NAVCAM - 17 MAI 2024 (SOL 4187) :


La crête dans le rétroviseur

Vers le Nord Ouest et la butte "Wilkerson" -au loin les remparts

Le rover surplombe le canal et la vallée qui s'étend jusqu'à gauche la butte "Texoli" et à droite "Wilkerson" - le parcours du rover prévoit un passage vers l'Ouest entre ces deux buttes

PANO NAVCAM - 17 MAI 2024 (SOL 4187) – Jan van Driel :

MOSA MASTCAM – 13-15 et 17 MAI 2024 (SOLS 4183/4185 et 4187) – Jan van Driel :
Espaces de travail successifs devant le rover

Je cite Lucy Thompson, géologue planétaire :
"Les ingénieurs chargés de la planification du rover ont encore une fois fait un excellent travail en naviguant à travers les grands blocs de roches qui jonchent le terrain devant nous. Nous nous rapprochons de plus en plus de la possibilité de traverser le canal de "Gediz Vallis" et les dépôts associés, une caractéristique que nous avons identifiée bien avant l'atterrissage et qui présente un grand intérêt scientifique. En tant que membre du groupe chargé de planifier les observations que nous espérons obtenir sur les dépôts de la vallée de Gediz et les formes de relief associées (appelé "Channel Surfers"), je suis très enthousiaste à l'idée d'arriver enfin à ce stade de la mission. Pour nous aider à prendre une décision, nous nous rapprochons un peu plus du bord du dépôt et nous prenons des images supplémentaires".
Avant de prendre la route, nous ferons bien sûr de nombreuses observations scientifiques à partir de notre position actuelle. L'espace de travail devant le rover contenait un bloc texturé intéressant qui a immédiatement attiré notre attention - un élément d'érosion à motifs polygonaux "Tuolumne Meadows" sur lequel nous avons pu placer le bras du rover pour l’analyse au contact. Nous pourrons également le brosser et enlever la poussière avant de l'analyser avec APXS pour la chimie et MAHLI pour la texture à échelle fine. ChemCam analysera également le même endroit, ainsi que la face avant du même bloc ("Wapama Falls"), qui sera également documenté par Mastcam. Pour comparer avec ce bloc, nous prévoyons également des analyses APXS et MAHLI sur un autre bloc de roche plus typique, "Parker Lakes".
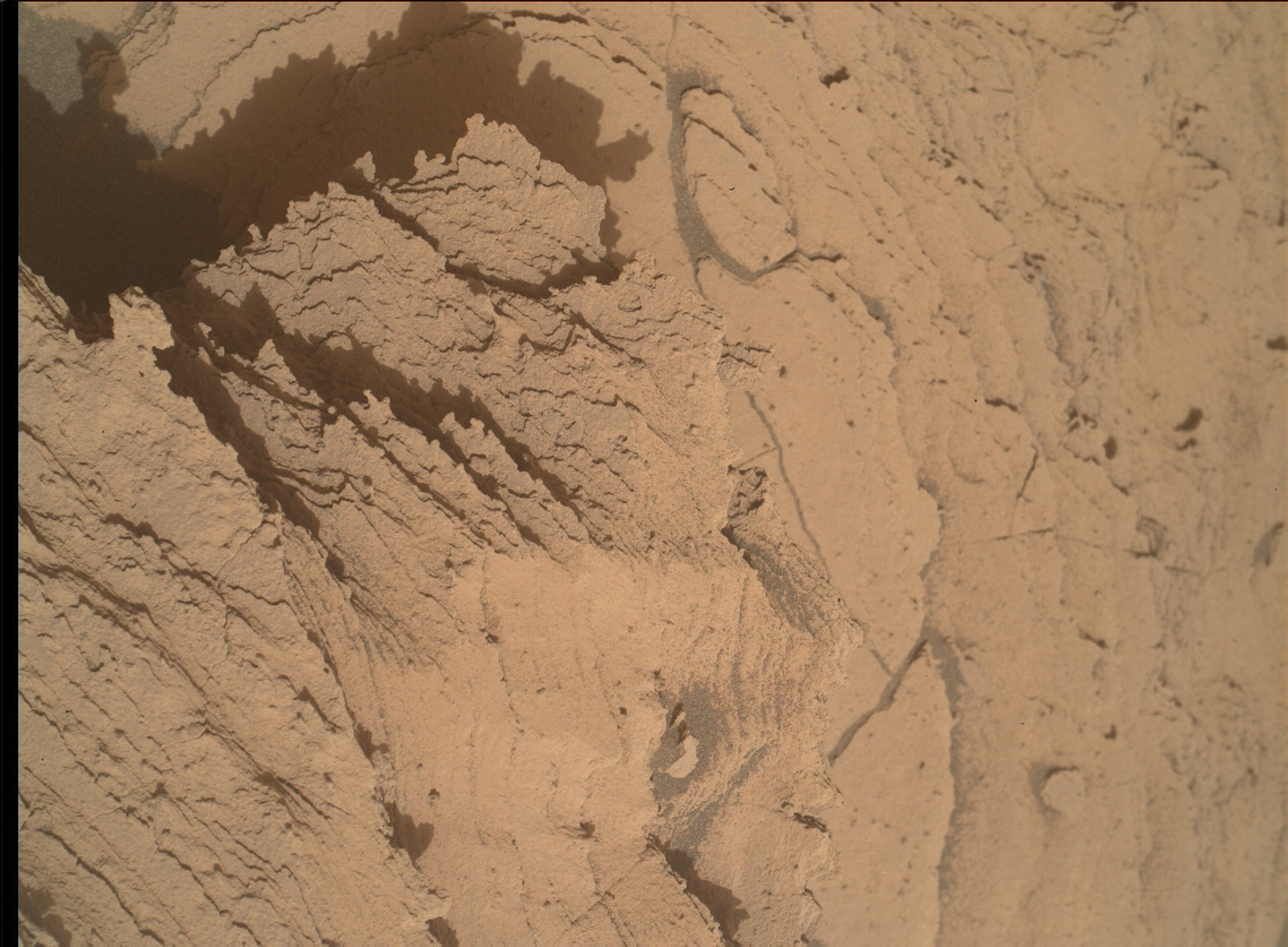
MOSAÏQUE MASTCAM – 17 MAI 2024 (SOL 4187) – Jan van Driel :
La roche à motifs polygonaux "Tuolumne Meadows"

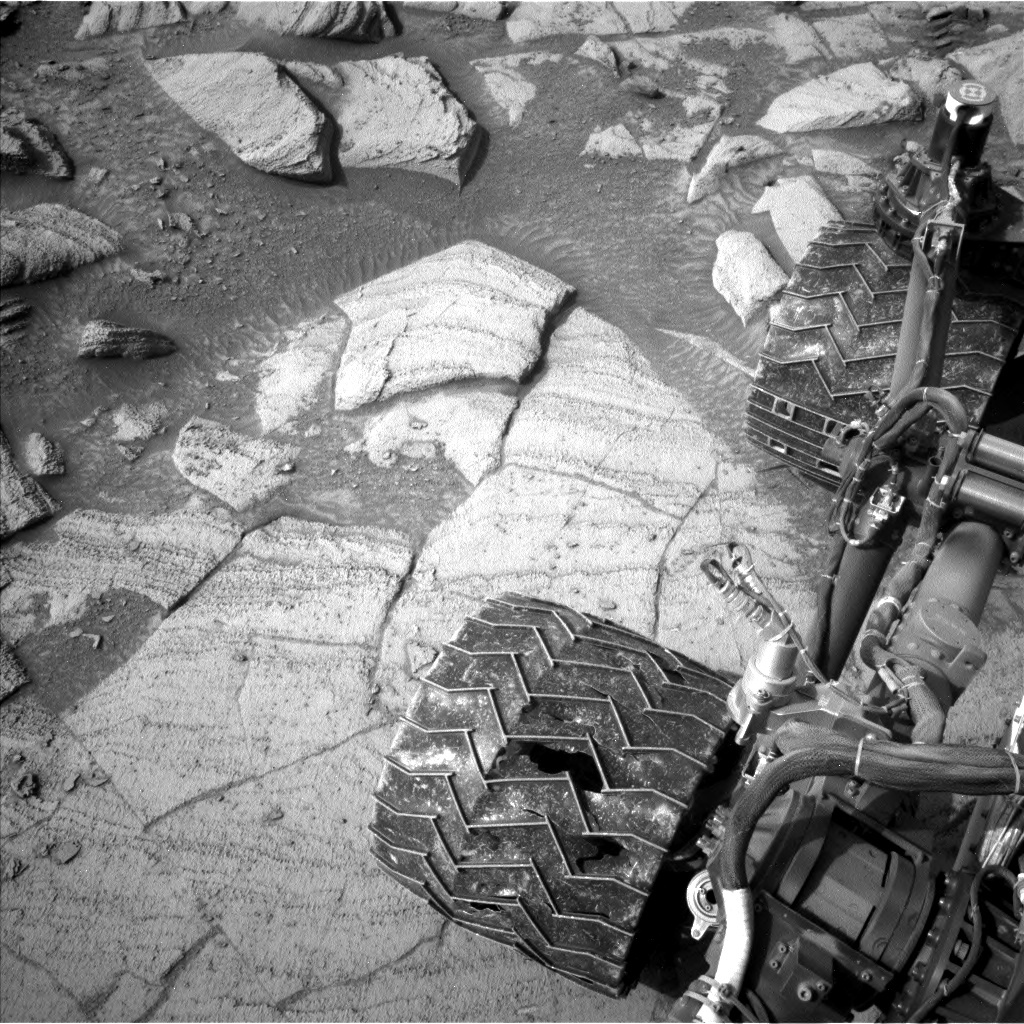
MOSAÏQUE MASTCAM – 15 MAI 2024 (SOL 4185) – Neville Thompson :
Roches noires sur les pentes de la crête "Gediz Vallis"
.thumb.jpg.7ec613e2a7d67de3be2c6fcbff78b70c.jpg)
En regardant dans le rétroviseur, la NavCam de Curiosity avait vu ces mêmes roches le 13 mai :

"En regardant un peu plus loin, les vues continuent d'être époustouflantes au fur et à mesure que nous gravissons le Mont Sharp, et nous voulions donc bien sûr documenter les caractéristiques intéressantes. L'unité Yardang, située au-dessus de nous sur le mont Sharp, est sur le point de disparaître de notre champ de vision.
AURORES MARTIENNES ?
Je cite Deborah Padgett, chef de projet OPGS au Jet Propulsion Laboratory :
"Dans la nuit du 10 mai, la Terre a connu un fantastique spectacle d'aurores (boréales et australes) qui s'est étendu jusqu'aux latitudes tropicales, grâce à la plus forte tempête géomagnétique depuis 2003. L'énorme région solaire active 3664, qui a produit les éruptions de classe X et les puissantes éjections de masse coronale à l'origine de cette tempête magnétique, s'est depuis éloignée de la Terre. Toutefois, ce groupe de taches solaires explosives fait désormais face à Mars. Au moment où la région active a pivoté vers Mars, elle a déclenché la plus grande éruption depuis 20 ans, un monstre de classe X8,7. Cette éruption solaire a également dirigé vers Mars une éjection de masse coronale (CME), potentiellement capable de produire des aurores. Étant donné l'absence de champ magnétique global sur Mars, les aurores martiennes ne sont pas concentrées aux pôles, comme c'est le cas sur Terre, mais apparaissent plutôt comme des "aurores diffuses globales" associées à l'ancienne croûte magnétisée de Mars. L'une des observations prévues pour Curiosity ce week-end sera une observation nocturne de la Mastcam du ciel au-dessus de la butte Texoli, dans l'espoir de capturer l'une de ces insaisissables aurores martiennes.
La recherche de contact sur "Tuolumne Meadows" et "Parker Lakes" sur le sol 4187 s'est achevée avec succès".
"L'image ci-dessous est une image MAHLI de "Parker Lakes" qui montre d'abondants nodules rocheux, certains perchés sur de minuscules tiges" :
MAHLI – 17 MAI 2024 (SOL 4187) :
Une sorte de mini "champignons"

Une version miniature des "hoodoos" du parc national de Bryce Canyon :
https://www.nps.gov/brca/learn/nature/hoodoos.htm
"Malheureusement, le parcours du sol 4187 s'est interrompu après 10 m en raison d'un dérapage de la roue arrière droite, et le positionnement de la roue qui en a résulté était trop incertain pour permettre des analyses au contact avec le bras robotique".
"Curiosity effectuera donc un bloc d'observations atmosphériques avec APXS et SAM pour mesurer les constituants atmosphériques".
"Bien après la tombée de la nuit, la Mastcam recherchera des aurores dans le ciel au-dessus de notre rover. Curiosity commence le sol suivant (4190) par une observation ChemCam LIBS et Mastcam de "The Fissures", une cible rocheuse finement laminée".
"Curiosity entamera ensuite son trajet de 27 m, qui s'achèvera près de la lèvre du canal de Gediz Vallis. Une fois le trajet terminé, Curiosity réalisera l'imagerie panoramique habituelle après le trajet et prendra une image MARDI du sol sous le rover. Le lendemain matin, Curiosity effectuera des observations atmosphériques matinales, notamment le tau solaire de la Mastcam pour mesurer la poussière dans l'atmosphère, la mesure de l'opacité de la Navcam et les films de nuages zénithaux et suprahorizon de la Navcam. Lundi, nous effectuerons des observations scientifiques de contact sur le nouveau site, puis nous déciderons de l'endroit où nous traverserons les sables du canal".
DEUXIÈME ÉTAPE du 20 MAI :
HAZCAM AVANT – 20 MAI 2024 (SOL 4190) :

NAVCAM - 20 MAI 2024 (SOL 4190) :


Le canal tout proche


PANO NAVCAM - 20 MAI 2024 (SOL 4190) – Jan van Driel :

TROISIÈME ÉTAPE du 21 MAI :
Je cite Conor Hayes, étudiant :
"L'un des plus grands défis liés à l'utilisation d'un rover sur une autre planète est que nous ne savons pas toujours exactement ce que nous aurons devant nous lorsque nous nous garerons après avoir roulé. Les équipes scientifiques et les planificateurs du rover (qui planifient les déplacements) font de leur mieux avec ce dont ils disposent, à savoir une combinaison d'images à haute résolution de la caméra HiRISE à bord du Mars Reconnaissance Orbiter et d'images de Curiosity regardant dans la direction prévue pour le déplacement".
"En fin de compte, nous ne savons pas à quoi nous aurons affaire lors d'une journée de planification donnée tant que nous ne sommes pas arrivés sur place. Parfois, c'est parce que le trajet présente des "défauts" et se termine prématurément, ce qui se produit lorsque l'on roule sur un terrain rocailleux ou sablonneux et que les systèmes de mobilité du rover dépassent leurs limites maximales autorisées. Ce n'était pas le cas aujourd'hui, car le trajet de 30 mètres vers la traversée du canal de Gediz Vallis que nous avions prévu lundi s'est parfaitement déroulé. En revanche, notre "espace de travail" (la zone devant le rover que l'on peut atteindre avec le bras) n'était pas aussi excitant que nous l'avions prévu, puisqu'il se composait principalement de sable et de petits rochers".
HAZCAM AVANT – 21 MAI 2024 (SOL 4191) :
L'espace de travail manque totalement de "cibles"

"Par conséquent, il a été décidé de passer aujourd'hui d'un plan "science de contact" où nous détachons le bras sur le premier sol pour une longue liste d'activités avant de repartir sur le deuxième sol, à un plan "touch and go" où nous nous concentrons principalement sur la télédétection et une liste plus limitée d'activités scientifiques de contact (le "touch") et où nous partons sur le premier sol (le "go"). Du point de vue des sciences de l'environnement, ce type de réorganisation majeure du plan peut être un peu stressant car il implique souvent un remaniement de dernière minute de nos activités planifiées à l'avance, mais la transition d'aujourd'hui a heureusement été assez simple".
"La décision de convertir le plan s'est avérée être une bonne décision de toute façon, car nous nous sommes garés avec notre roue avant gauche au-dessus d'un tas de petits rochers, ce qui a limité les types d'activités du bras que nous pouvions effectuer en toute sécurité, quel que soit l'intérêt de l'espace de travail. Le fait de déplacer le départ du deuxième au premier sol signifie également que nous serons en mesure d'obtenir plus de données utiles sur Terre avant de commencer à planifier le long week-end de vendredi".
"Malgré un espace de travail moins intéressant (et en mettant de côté le fait que qualifier une partie de la surface d'une autre planète de "moins intéressante" est un peu fou), nous parvenons encore à intégrer une quantité décente de données scientifiques dans ce plan".
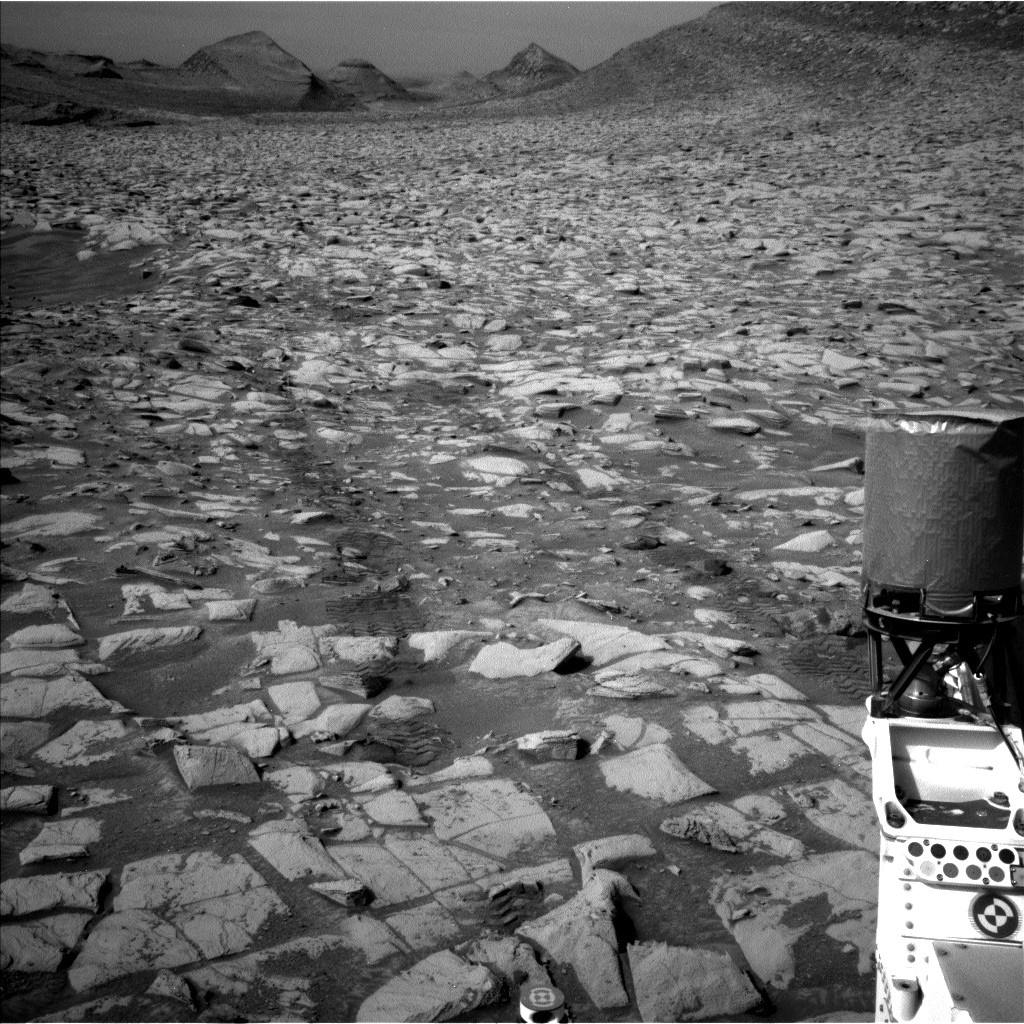
NAVCAM - 21 MAI 2024 (SOL 4191) :


Toujours pas vraiment de passage pour rejoindre "Texoli"

Vers le Nord - Les remparts apparaissent un peu plus nettement

Vers le Nord-Ouest et "Wilkerson" en avant plan

PANO NAVCAM - 21 MAI 2024 (SOL 4191) :

-
4
-
2
-
-
Pffff... laisse Bernard, le Super il est assez peu ouvert à la poésie (enfin à vrai dire.. c'est bizarre, il est surtout totalement hermétique à celle que les astronautes tentent d'exprimer
).
Perso je suis absolument en accord avec Pesquet, très sensible à la poésie que dégage la beauté de la nature.
Il est vrai qu'il n'est pas forcément nécessaire de l'admirer depuis l'espace.
Entre autres certaines images de couchers de soleil me fascinent et me donnent envie de..... heu.. enfin voilà quoi :

-
2
-
6
-
-
20,54 jours c'est la période orbitale de l'étoile double Mizar A
Mizar A et B tournent autour l'une de l'autre tous les 2 000 ans.
Je cite :
Mizar est en fait une binaire visuelle, dont chacune des composantes, Mizar A et Mizar B sont elles-mêmes des binaires spectroscopiques, ce qui en fait une étoile quadruple. C'est donc en observant Mizar A que Maury s'aperçut que la raie spectrale K du calcium était parfois floue, parfois double, avec une périodicité de 52 jours. L'hypothèse formulée alors fut que Mizar A était « elle-même une étoile double ayant des composantes d'à peu près même luminosité, et trop serrée pour avoir déjà été résolue visuellement. De plus, que la durée de révolution du système est de 104 jours. » (Pickering, 1890). En réalité, la période est de 20,5 jours, l'erreur provenant de l'orbite fortement excentrique et de l'orientation du grand-axe. En 1908, Mizar B fut également découverte comme binaire spectroscopique, mais les raies de la secondaire étaient trop faibles pour être vues.
https://wwwhip.obspm.fr/~arenou/Wiki/Binaire_spectroscopique.html
-
1
-
-
Il y a 2 heures, Alain MOREAU a dit :Dis-nous Daniel : si l'enveloppe d'(alliage) alu des roues venait à se désagréger complètement, le rover parviendrait-il encore à se traîner cahin-caha sur les moignons de titane restants ?
Salut cher @Alain MOREAU
Je vais te répondre, mais aussi aborder d'autres problématiques liées aux déplacements du rover, ce qui anticipera j'espère d'autres questionnements.
Je suppose que lorsque tu évoques "l'enveloppe" tu veux parler essentiellement de la "peau" alu entre les chevrons..
Cette "peau" ne joue aucun rôle dans le maintien structurel de la roue.
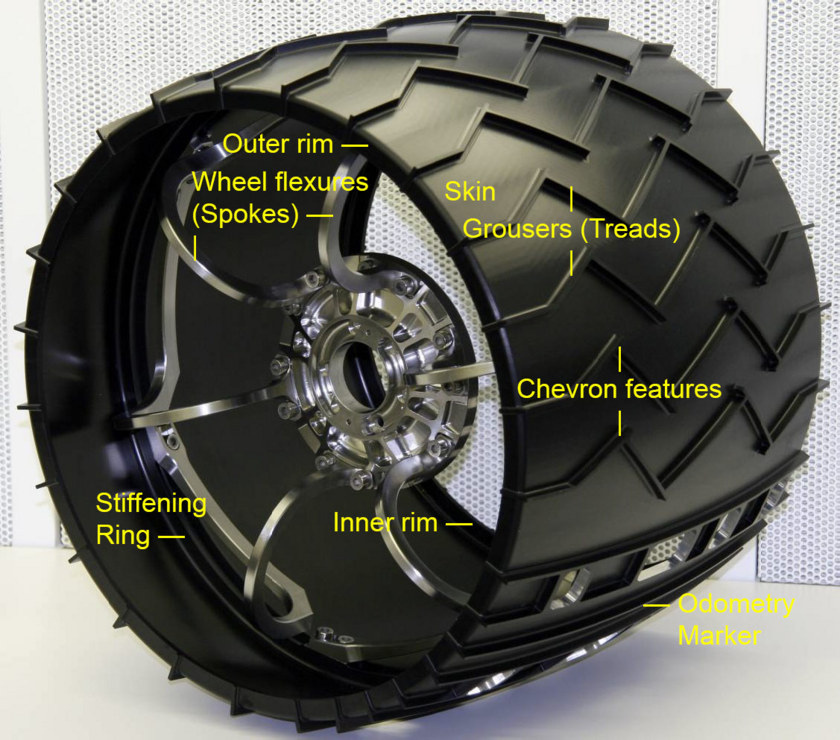
Ce rôle est dévolu aux chevrons et aux jantes (3 jantes par roue, 2 à chaque bord et une au tiers intérieur - voir image ci-dessous).
RAPPELS :
Les roues de Curiosity sont en aluminium et mesurent 50 cm de diamètre sur 40 cm de large.
Les éléments de flexion et le moyeu sont en titane..
Pour la résistance structurelle il existe une jante verticale sur chaque bord de la roue (Inner rim et Outer rim) .. On trouve une autre jante située à peu près au tiers intérieur de la roue (Stiffening rim), qui agit en raidisseur structurel auquel sont attachées les rayons souples (Wheel flexures). Les 19 nervures en zig zag sont les chevrons (grousers) qui ont également un rôle structurel.
Entre les chevrons existe une peau d'aluminium ultra-mince de 0,75 millimètre d'épaisseur dont le rôle essentiel est d'éviter aux roues de trop s'enfoncer dans le sable, mais elle n'a aucun rôle structurel.
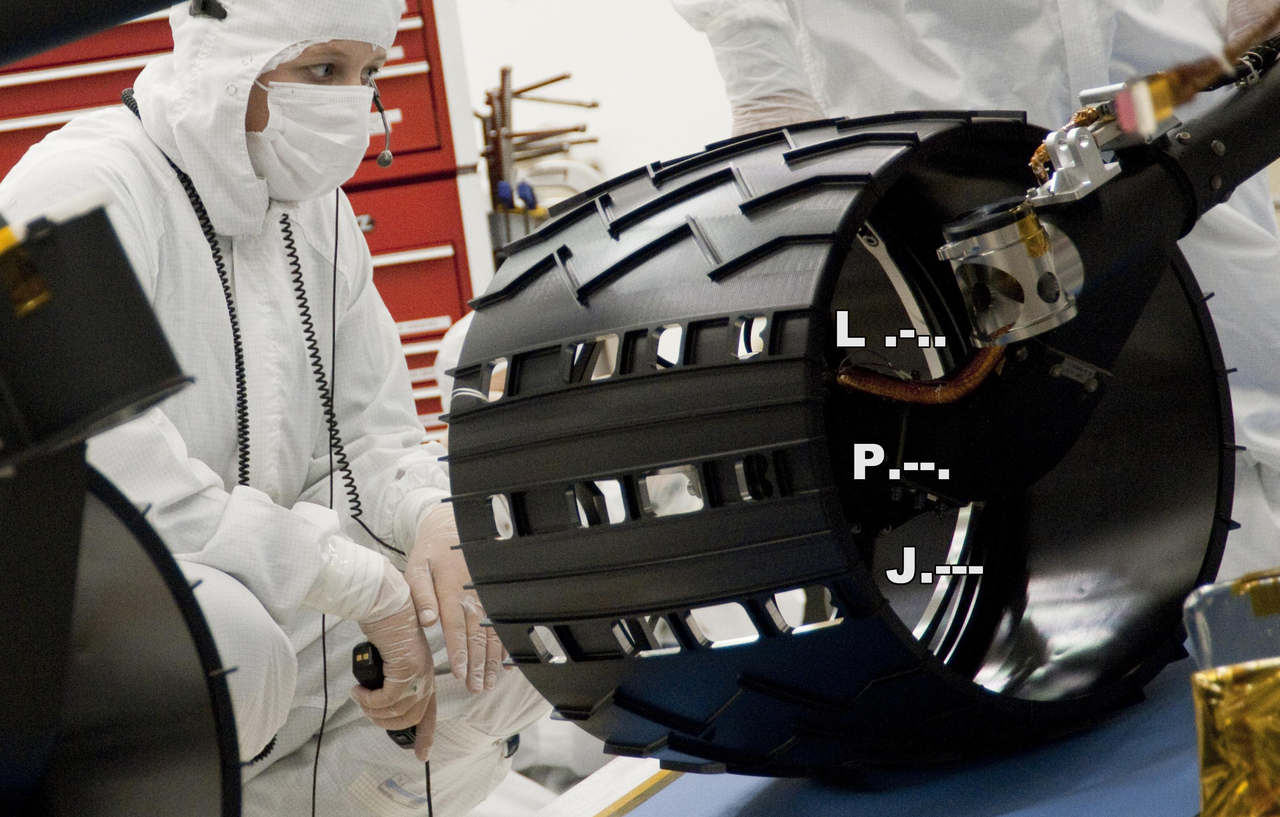
On peut remarquer aussi que chaque roue comporte des orifices carrés ou rectangulaires alignés sur trois niveaux. Ces alvéoles codent le message "JPL" en morse dans les traces de roulement - image ci-dessous !..Pourquoi en morse ? Parce que la Nasa a refusé que cette petite coquetterie apparaisse en clair ! Ce sigle sert aussi de marqueur d'odométrie permettant au logiciel de navigation du rover de mesurer sa progression sur des surfaces molles (en photographiant les traces de roulement).
Lors de tests poussés menés sur Terre pour vérifier jusqu'où pouvaient mener la déchirure des chevrons, on peut constater que même dans le cadre d'une déchirure quasi totale, la structure ronde semble préservée grâce aux trois jantes :

Les 2 roues avant et les 2 roues arrière sont dotées de moteurs de direction individuels, en plus des moteurs de traction.
Le contrôleur de moteur ne peut entraîner les moteurs de traction en même temps que les moteurs de direction. De sorte que le rover doit s'arrêter chaque fois qu'un ajustement du cap est nécessaire. Dans ce cadre seules les roues avant et arrières tournent.
Chaque roue possède son propre moteur avec un couple très élevé. Sur un sol dur et plat le rover peut atteindre une vitesse de 4 cm/s, soit 150 mètres à l'heure, mais le plus souvent en système de navigation autonome (logiciel "autonav") il a une vitesse moyenne d'environ 1,5 cm/s.
Spirit et Oppy, un peu plus rapides, pouvaient progresser à une vitesse théorique de 5 cm par seconde (180 mètres à l'heure) et, dans les cas les plus favorables en énergie rouler jusqu’à quatre heures par jour.
Par ailleurs, concernant Curiosity, en roulant l’appel de puissance peut grimper jusqu’à 500 watts.. soit le domaine le plus énergivore de l’engin. Ce qui oblige à le mettre plus ou moins longuement en stand-by à la fin d’un trajet afin de recharger ses batteries. En fait c’est une des raisons qui justifie que les déplacements soient le plus souvent réalisés en fin de journée, le rechargement efficace des batteries s’effectuant prioritairement de nuit, lorsque le rover est le plus souvent inactif côté instruments.
Pour Curiosity le record de distance parcourue en un seul sol se situe le 5 sept 2013 au sol 385 avec 141,5 mètres au compteur..
Oppy a longtemps détenu la plus longue distance parcourue par un engin robotisé sur Mars en un sol. L’exploit a été réalisé le 20 mars 2005 au sol 410 avec une distance de 220 mètres. Mais aujourd’hui Perseverance doit être bien au-dessus de ces chiffres.
Depuis 2013, des déchirures ont été constatées concernant essentiellement la peau en aluminium. Que la mince tôle d’aluminium soit déchirée n’est pas très problématique. Le risque serait que la tôle se replie et arrache le câble d’alimentation du moteur de roue, un risque qui semble quand même très limité. Doubler l'épaisseur de la "peau" des roues du rover (de 0,75 mm à 1,50) augmenterait approximativement la masse de l'ensemble de celles-ci d'un total de 3,6 kg, ce qui n'était pas envisageable.
En effet, le principal obstacle à l'augmentation de la masse des roues résulte de la gestion d'une séquence délicate à l'atterrissage. C'est à dire à l'instant où les roues sont déployées alors que le rover est suspendu sous l'étage de descente : La chute brutale des roues induite par leur déploiement implique des efforts importants, voire limites, sur l'ensemble du système.
Et quand on connaît la peine que se donnent les ingés pour miniaturiser tous les équipements scientifiques, la chasse permanente aux excès de poids à tous niveaux : chassis, propulsion, communication, instruments, dans la conception de ces engins, on peut imaginer que les ingénieurs aient été contraints "d'élaguer" quelque peu et de se contenter du strict nécessaire pour les roues.
Ce sont surtout les deux roues centrales qui subissent des dégâts. En particulier du côté gauche où plusieurs chevrons cassés entrainent un affaissement de la partie centrale de la roue.
Quand le rover roule sur un terrain plat toutes les roues tournent à la même vitesse. Mais quand il y a un obstacle, la roue qui est en avant tire sur la roue qui attaque l’obstacle, et la roue qui est derrière pousse celle-ci sur l’obstacle.
En mars 2017, après 18 mois d’essais au JPL, un premier nouveau logiciel avait été téléchargé sur Curiosity afin de limiter l’usure des roues. Ce logiciel avait été testé sur Mars durant plusieurs mois et déclaré bon pour le service le 8 juin 2017.
Chaque roue possédant son propre moteur avec un couple très élevé, le logiciel corrige la vitesse des roues en fonction des déplacements de la suspension. Des réductions de 11 à 20% des efforts ont été mesurées grâce à un "contrôleur intelligent" sur la tension électrique moteur de chaque roue en permettant aux taux de rotations des roues de varier intelligemment en réponse aux conditions détectées. Ce logiciel détecte aussi quand une roue tourne dans le vide et ajuste la vitesse des autres jusqu’à ce que la roue soulevée reprenne contact avec le sol.
Par ailleurs le système de navigation autonome nommé "Autonav" installé depuis mars 2013 a été remplacé début avril 2023 par un nouveau logiciel.
Le rover peut désormais "penser en conduisant", ce que le nouveau rover martien, Perseverance, peut faire d'une manière plus avancée pour naviguer autour des rochers et des pièges à sable. Lorsque Perseverance roule, il prend constamment des photos du terrain à venir, qu'il traite avec un ordinateur spécialisé afin de pouvoir naviguer de manière autonome pendant un trajet continu.
Curiosity n'a pas d'ordinateur dédié à cet effet. Au lieu de cela, il roule par segments, s'arrêtant pour traiter les images du terrain après chaque segment. Cela signifie qu'il doit démarrer et s'arrêter à plusieurs reprises au cours d'un long trajet. Le nouveau logiciel aidera le vénérable rover à traiter les images plus rapidement, ce qui lui permettra de passer plus de temps en mouvement.
"Cela ne permettra pas à Curiosity de rouler aussi vite que Persévérance, mais au lieu de s'arrêter pendant une minute entière après un segment de conduite, nous ne nous arrêterons que quelques instants", a déclaré Jonathan Denison du JPL, chef de l'équipe d'opérations techniques de Curiosity. "Le fait de passer moins de temps au ralenti entre les segments de conduite signifie également que nous consommons moins d'énergie chaque jour. Et même si nous avons presque 11 ans [près de 12 ans aujourd’jui], nous continuons à mettre en œuvre de nouvelles idées pour utiliser une plus grande partie de l'énergie disponible pour des activités scientifiques".
Lorsqu'en 2013 les ingénieurs se sont rendu compte que des rochers pointus usaient les bandes de roulement, ils ont mis au point en 2017 un algorithme destiné à améliorer la traction et à réduire l'usure des roues en ajustant la vitesse du rover en fonction des rochers sur lesquels il roule.
Le nouveau logiciel installé en avril 2023 va plus loin en introduisant deux nouvelles commandes de mobilité qui réduisent la proportion de manœuvres de directions que Curiosity doit effectuer lorsqu'il roule en arc de cercle vers un point de repère spécifique. En réduisant la sollicitation de la direction, l'équipe peut atteindre plus rapidement l'objectif de conduite et réduire l'usure inhérente.
"Cette capacité a été imaginée à l'époque de Spirit et d'Opportunity", a déclaré M. Denison. "Il s'agissait d'une option intéressante qu'il a été décidé de ne pas mettre en œuvre".
Ce qui peut inquiéter, c'est le déchirement des chevrons qui sont structurels. Les tests de longévité réalisés sur Terre indiquent que lorsque 3 chevrons sont cassés, les roues ont atteint environ 60 % de leur durée de vie. Mais pour le moment il semble qu’on soit encore assez loin de ce cas de figure, surtout lorsque ça ne concerne qu'une seule roue (roue centrale gauche).
Pour mémoire, Curiosity utilise une suspension sans ressorts baptisée "rocker-bogie" (déjà mise au point pour les rovers "MER") qui limite l'inclinaison de la caisse du rover. L'engin peut ainsi résister à une inclinaison d'au moins 50 degrés dans n'importe quelle direction sans se renverser, des capteurs automatiques limitent toutefois l'inclinaison à 30 degrés.
Cette conception permet au rover de se déplacer sur des objets à peu près aussi grands que le diamètre de la roue (0,50 m) tout en gardant les six roues au sol.. Le dégagement sous le corps du rover est de 66 cm. Chaque roue avant et arrière peut être piloté indépendamment, permettant au véhicule de tourner sur place. Sur un sol dur et plat le rover peut atteindre une vitesse de 4 à 5 cm/s, mais le plus souvent en système de navigation autonome il a une vitesse moyenne d'environ 1,5 cm/s.
Il faut bien voir qu'à cette vitesse véritablement très lente et avec le couple très élevé des moteurs de roues, des roues carrées n’empêcheraient en rien le rover d'avancer sans aucun problème (dixit les ingénieurs du JPL) !..
Pour l'anecdote, chez les super-passionnés d'astronautique du forum UMSF (d'ailleurs souvent excellentissime), le début de la dégradation des roues en 2013 avait fait surgir l'angoisse, et un fil dédié à ce problème avait été ouvert. Ayant conclu au bout de quelques pages que ce problème n'était pas aussi grave que redouté, certains se demandaient s'il ne fallait pas fermer le fil...
L'un des membres a suggéré ironiquement de le conserver, parce qu'au fond ce fil servait aussi à assurer une "thérapie de groupe pour les pessimistes morbides"
.
Avec l’expérience acquise, on peut noter que la bande de roulement de Perseverance comporte beaucoup plus de lignes de crampons. La peau alu entre les crampons est "plus épaisse", mais comme il faut ne pas alourdir le poids des roues, elles ne sont "pas aussi larges" que les roues de Curiosity, mais très légèrement plus grandes en diamètre (diam 52,5 cm au lieu de 50 cm pour Curiosity).
Mais au final, avec le gain en largeur, les roues de Perseverance sont plus légères que celles de Curiosity !
Perspectives :
Tous les systèmes du rover et les instruments scientifiques sont capables d'atteindre les objectifs de la mission. Le système d'alimentation en radio-isotopes du rover se dégrade comme prévu, avec moins d'énergie disponible pour les opérations scientifiques au fur et à mesure que le temps passe. Cette réduction a été compensée par une planification et une utilisation plus efficaces, mais on s'attend à ce que la productivité DIMINUE DANS LES années à venir, en particulier pendant les hivers australs. Le rover ne dispose plus d'un ordinateur principal entièrement redondant, bien que le second ordinateur reste disponible pour assurer le fonctionnement de base dans le cas d'une anomalie majeure. L'activité de forage se poursuit prudemment après avoir surmonté la perte d'un moteur clé et des freins redondants de deux articulations du bras robotique.
L'usure des roues du rover ne devrait pas limiter la durée de la mission restante (fin 2025 ou courant 2026 ??
..) mais elle exclut certains types de terrains pathologiques. Bien que certaines capacités de mesure d'instruments clés se soient dégradées avec le temps, la mesure de la vitesse et de la direction du vent est la seule perte fonctionnelle complète (capteur cassé sur le mât par une pierre à l'atterrissage).
Curiosity évalue actuellement la persistance de l'habitabilité en explorant deux caractéristiques du Mont Sharp qui sont supposées être la preuve de transitions environnementales majeures.
La première est l'unité de sulfate de magnésium hydraté de 400 mètres d'épaisseur) qui pourrait être associée à un changement à l'échelle planétaire de conditions plus humides à des conditions plus sèches. Également dans cette unité se trouve un ensemble de reliefs qui peuvent représenter l'étape la plus récente de l'activité hydrique à Gale : un canal fluvial probable dans la "vallée de Gediz", sculpté par le vent, et une grande crête probablement déposée par des coulées de débris.
En 2025, en quittant la "vallée de Gediz" Curiosity atteindra on l'espère un champ de fractures cimentées de taille décamétrique (structures en caisson) qui pourraient présenter la meilleure opportunité d'évaluer la présence d'un environnement autrefois habitable et préservé dans le sous-sol.
-
2
-
4
-
-
Surprise !
Le 13 mai (sol 4183) Curiosity a roulé plein Ouest sur environ 25 mètres, rejoignant ainsi le lit de sable du canal et s’éloignant encore notablement du trajet prévisionnel !
Le 15 mai (sol 4185) il a repris la direction Sud sur environ 19 mètres.
L’équipe du rover tente certainement un parcours plus direct vers l’Ouest pour éviter d’avoir à effectuer la boucle de contournement de 200 mètres du trajet prévisionnel (voir images ci-dessous)
POSITION AU 15 MAI 2024 – SOL 4185 :

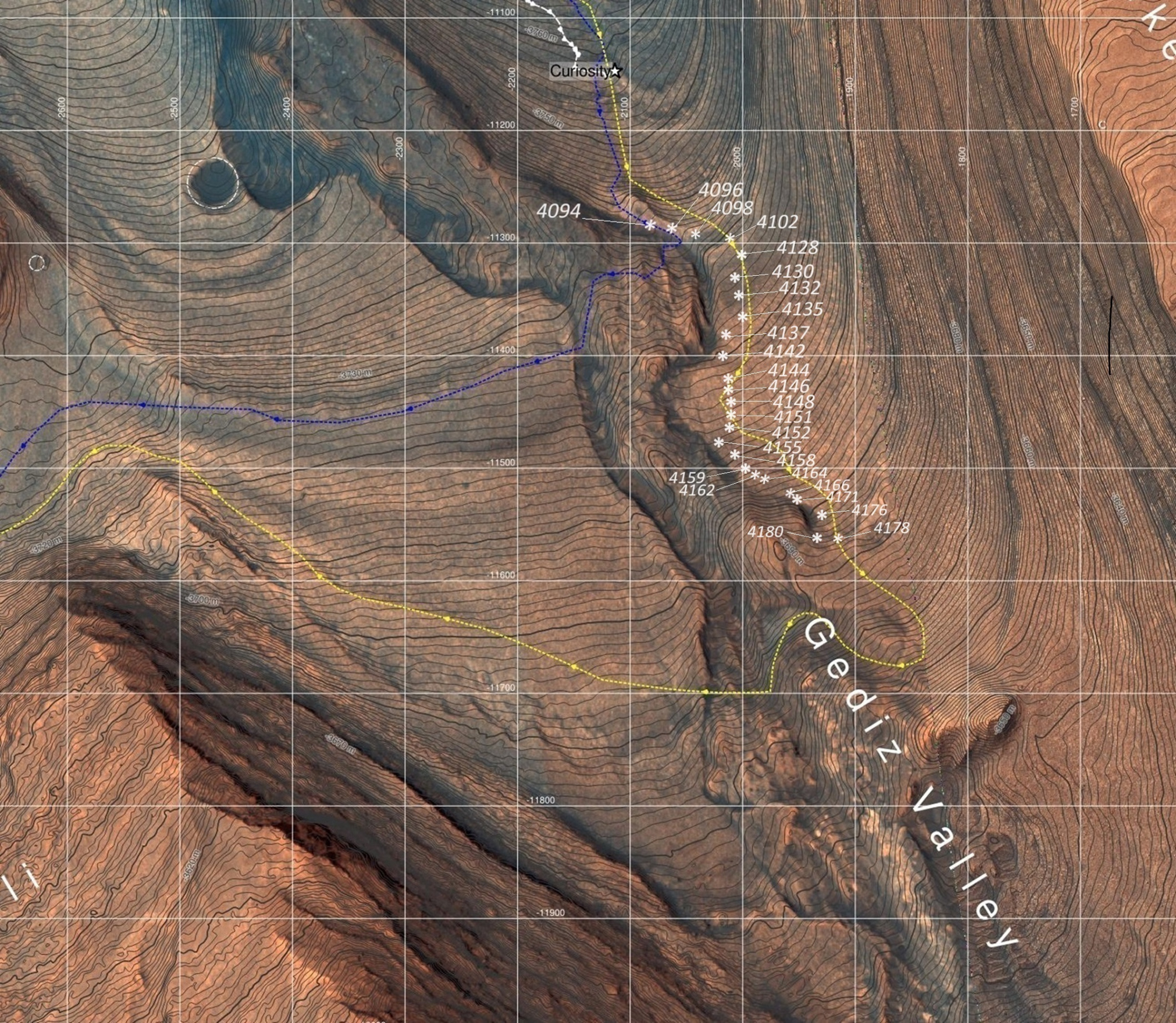
POSITION RELATIVE AU TRAJET PRÉVISIONNEL :
Noter la dernière position et la longue boucle de contournement que le rover cherche certainement à éviter
HAZCAM AVANT – 13 MAI 2024 (SOL 4183) :
Face à la crête et la butte "Texoli" à l'Ouest
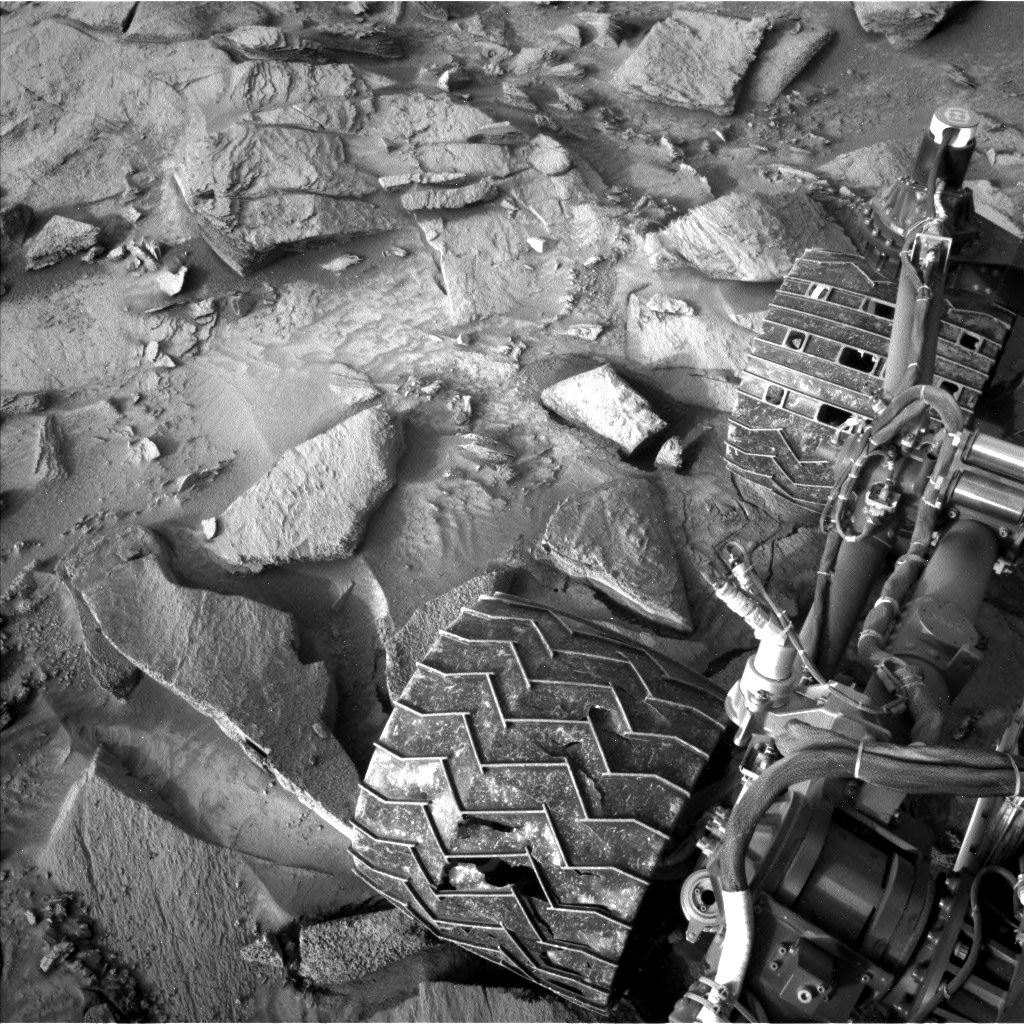
NAVCAM - 13 MAI 2024 (SOL 4183) :

Les roues.. C'est toujours quelque chose de spécial de les voir posées sur le sol de Mars.
Aucune invention (3500 ans avant J.C. ?) n’est plus chargée de symboles que la roue.
Selon la mythologie indo-européenne le disque solaire est une roue qui entraîne un char divin.. c'est aussi parfois le symbole de la vie, du temps, du destin. Selon Anacréon, grand poète grec de l'antiquité : "La vie de l’homme roule, instable, comme les rayons d’une roue de char".
Entre autres la "roue du Dharma" représente aussi un symbole fort du Bouddhisme pour qui sa forme ronde est une forme divine et marque la perfection de chaque enseignement de Bouddha..
Dans ce cadre elle se divise en trois parties :
- La partie extérieure ou la jante, en forme de cercle, représente la conscience et l’état de transe méditative (concentration).
- Le centre constitue la discipline morale et représente l’équilibre et l’harmonie.
- Les rayons symbolisent la sagesse, indispensable pour vaincre l’ignorance.
Plus concrètement, l'invention de la roue annonçait surtout l'avènement.. de la technologie.
Et depuis les sumériens, on va dire que les matériaux utilisés ont quand même un peu évolué : Ici la roue est en alu, les éléments de flexion et le moyeu sont en titane.
Vers le Nord Ouest et les remparts du cratère - en avant plan à droite l'extrémité Sud de la crête
Cette partie de vallée était auparavant cachée par la crête.. Au loin à les buttes "Texoli" à gauche et "Wilkerson" à droite
PANO NAVCAM - 13 MAI 2024 (SOL 4183) – Jan van Driel :
Je cite Emma Harris :
"Ce qui continue de m'émerveiller, c'est l'incroyable série d'instruments de Curiosity qui peuvent non seulement nous aider à évaluer les roches qui nous entourent, mais aussi nous permettre de voir des détails très précis sur des roches situées à des centaines de mètres - comme la butte Texoli - et aujourd'hui, nous avons profité de ces superpouvoirs !
ChemCam regardera au loin pour nous au cours des deux prochains sols, en commençant par une RMI à longue distance de la butte Texoli. Au cours du deuxième sol, nous observerons une structure située plus haut dans le canal de Gediz Vallis, que nous n'atteindrons pas avec le rover et qui s'appelle "Milestone Peak".
Les observations à longue distance sont vraiment utiles pour s'assurer que nous pouvons voir tout ce dont nous avons besoin, même si nous ne roulons pas très près. Nous jetons ensuite un coup d'œil entre les buttes de Gediz Vallis et au-dessus de l'unité sulfatée dans laquelle nous roulons actuellement jusqu'à l'unité yardang pour la dernière RMI à longue distance de ce plan. Nous pouvons également utiliser la super vision de Curiosity pour observer l'atmosphère ! Au cours des deux prochains sols, la Mastcam mesurera la quantité de poussière dans l'atmosphère par une mesure tau, et la Navcam prendra un film suprahorizon tout en restant à l'affût des tourbillons de poussière."
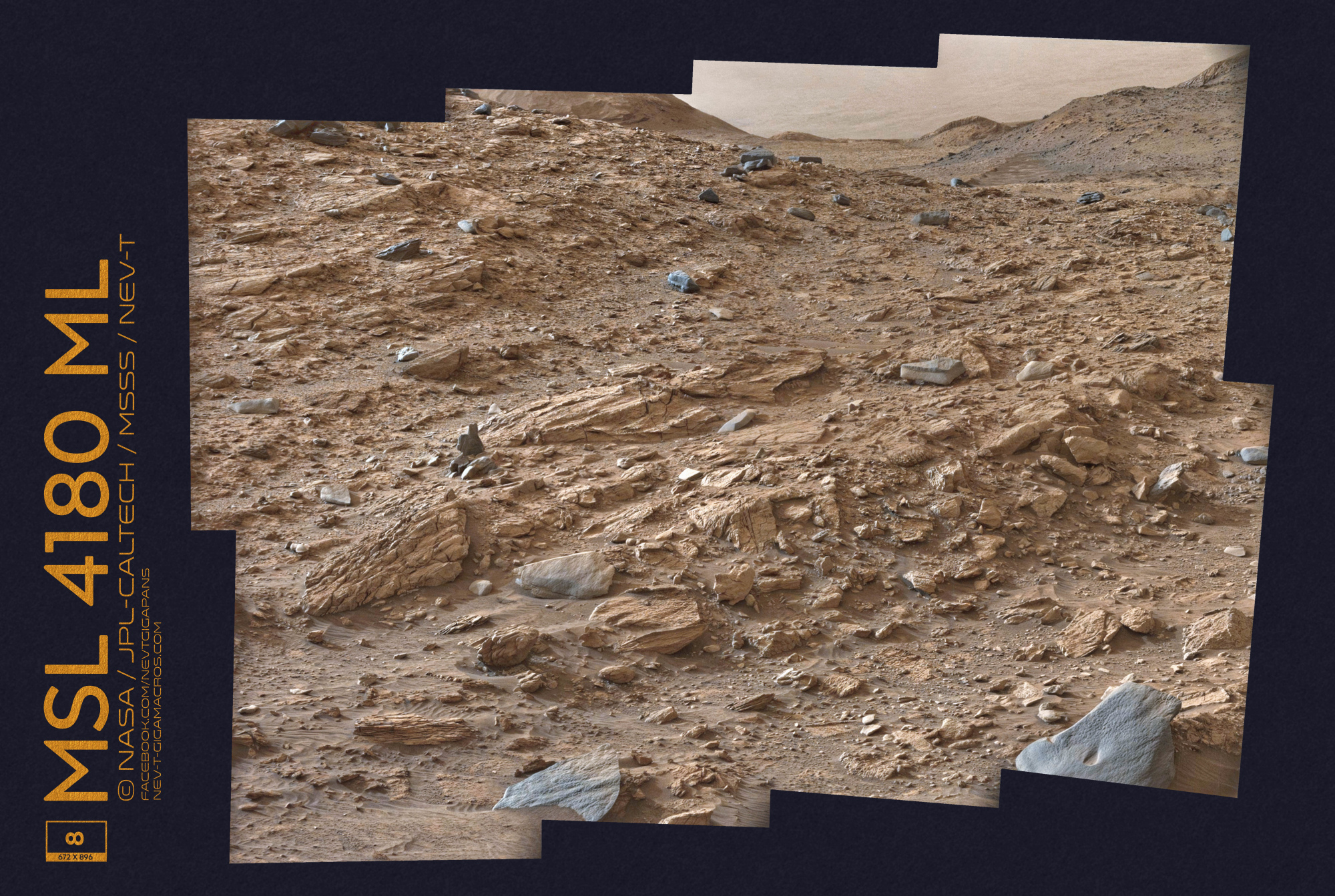
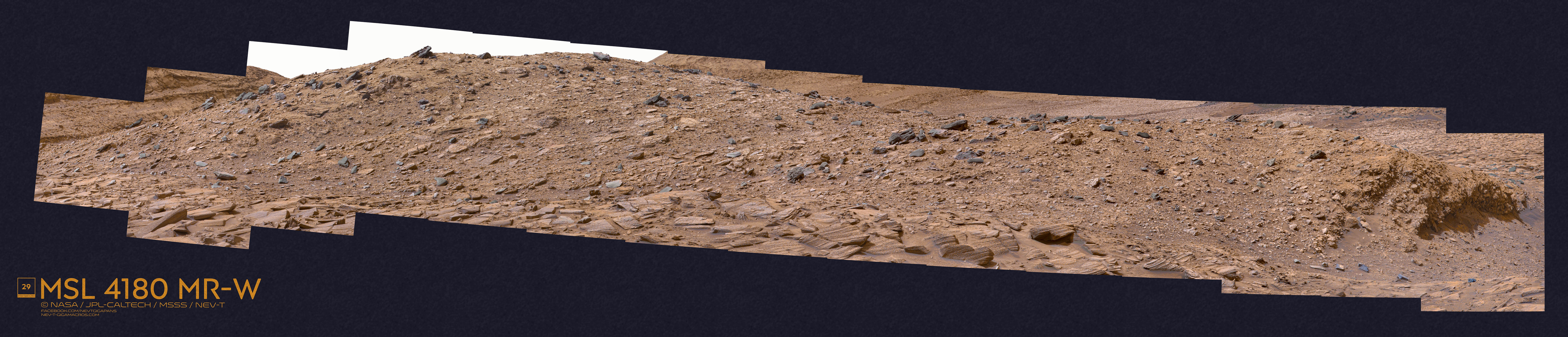
MOSAÏQUES MASTCAM – 10 MAI 2024 (SOL 4180) – Neville Thompson :
Extrémité Sud de la vallée "Gediz" - à gauche la butte "Kukenan" à droite "Texoli", au loin on devine la zone claire des "Yardangs" - La structure "Milestone Peak" évoquée par Emma Harris est la petite butte qui émerge du sable à gauche.

L'ensemble de "Pinnacle Ridge" côté Sud que Curiosity a contourné (par son extrémité à droite de l'image)
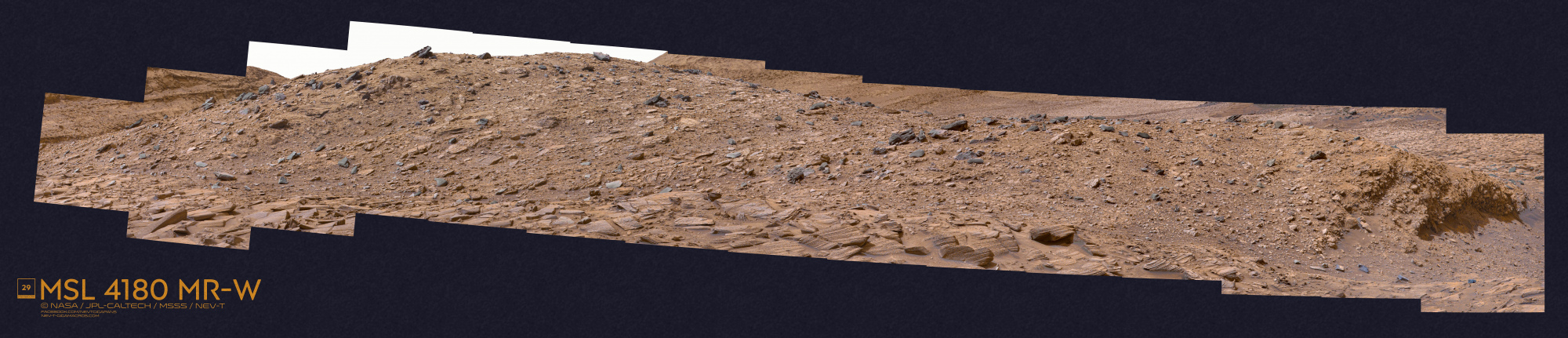
Vue rapprochée de "Pinnacle Ridge" qui semble manifestement constituée de débris accumulés, dont ces curieuses roches sombres (basaltiques ?)
HAZCAM AVANT – 15 MAI 2024 (SOL 4185) :
Toujours aussi rocailleux !
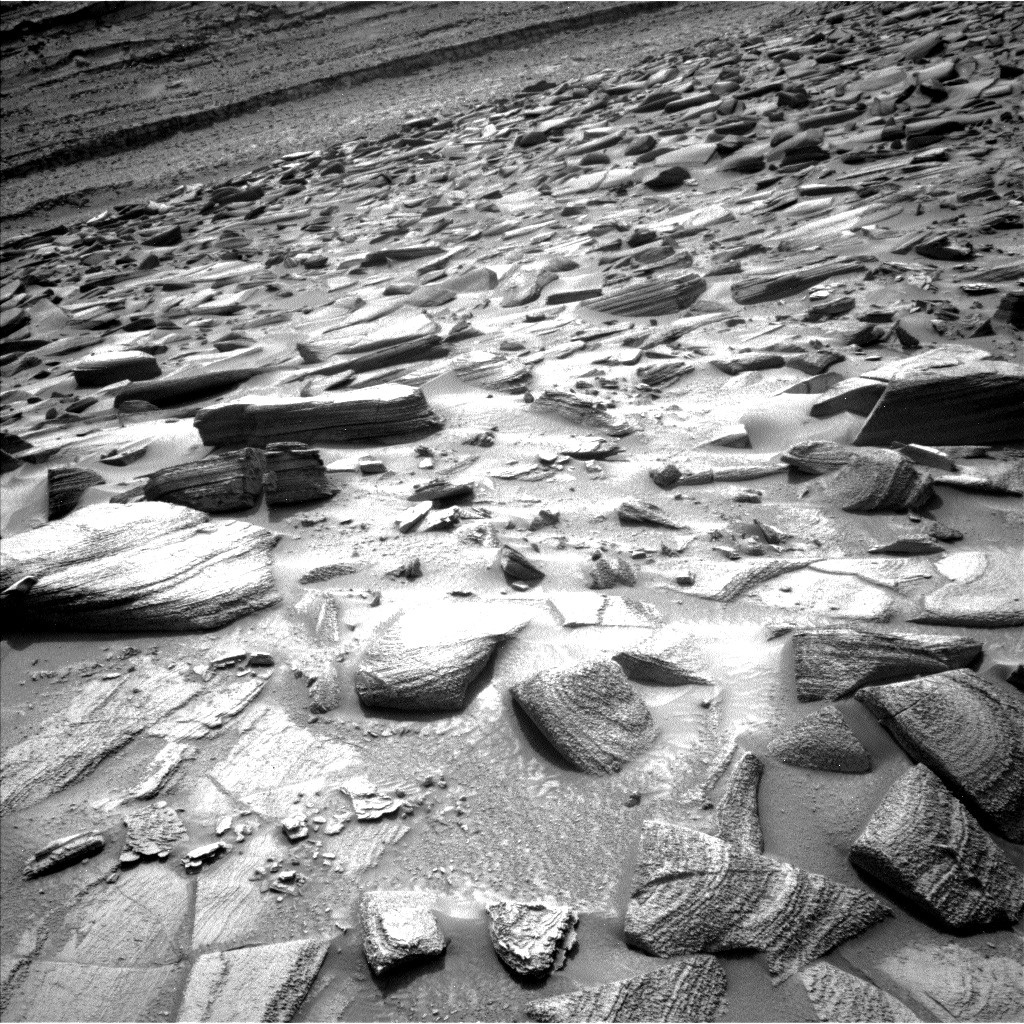
NAVCAM - 15 MAI 2024 (SOL 4185) :

Vers le point d'entrée pour se diriger vers l'Ouest, à droite de l'image - le canal se prolonge au bas de l'image
PANO NAVCAM - 15 MAI 2024 (SOL 4185) – Jan van Driel :
-
3
-
2
-
6
-
-
Il y a 5 heures, jackbauer 2 a dit :Wemby très callé en astrophysique !!!!

Impeccable !Même @VNA1 a compris..
-
Petite précision :
Sachant qu’un sol martien dure environ 40 minutes de plus qu'un jour terrestre, tous les 38 jours terrestres la date de planification des activités du rover "saute" un jour terrestre pour permettre de synchroniser à nouveau jours terrestres et sols martiens.
Ainsi, on vient de passer du 6 mai (sol 4177) au 8 mai (sol 4178). Priorité aux sols martiens donc.
Une synchronisation qui se perdra lentement.. jusqu’au prochain réajustement dans 38 jours terrestres.
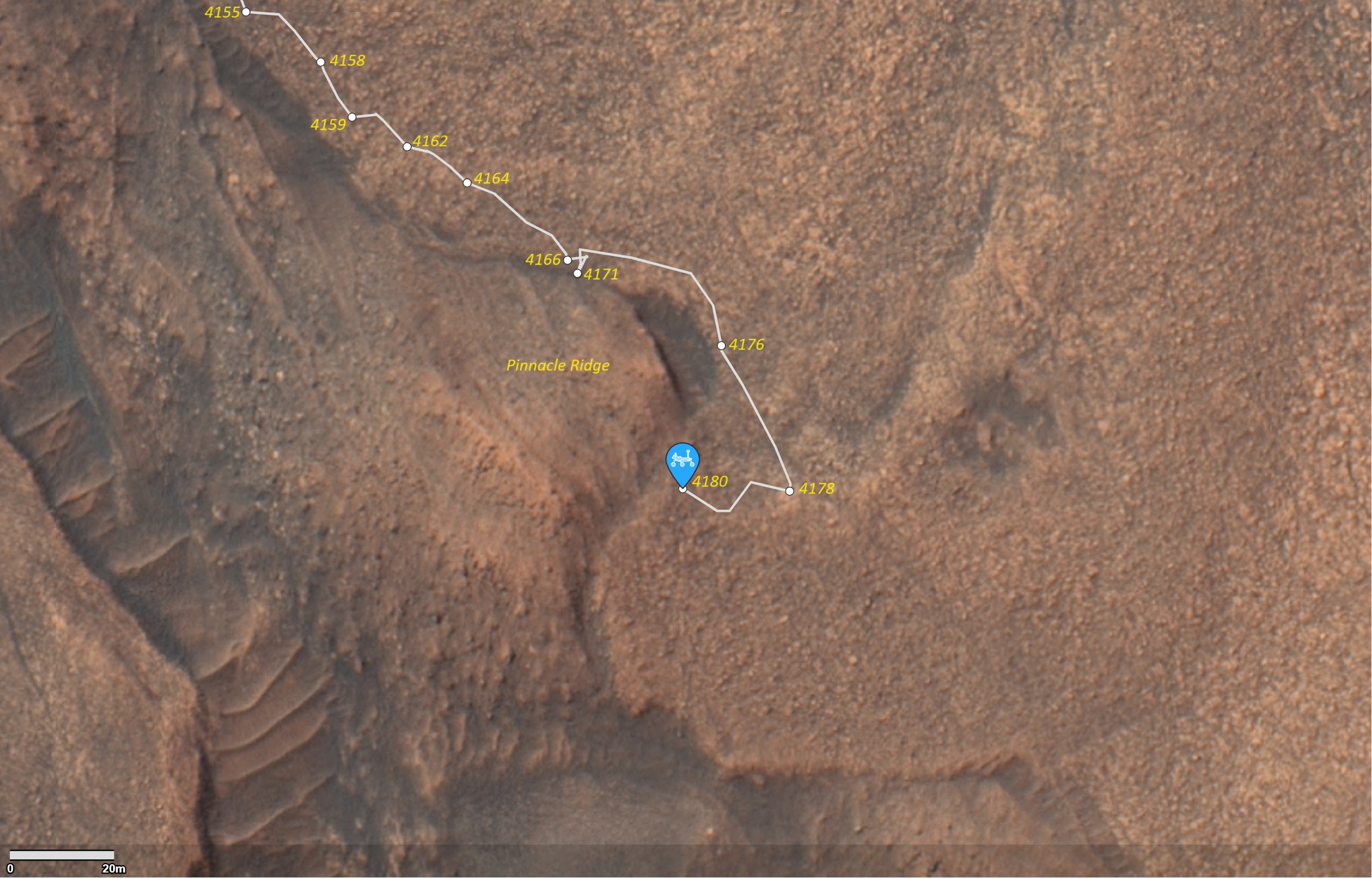
Deux nouveaux déplacements effectués permettant de contourner totalement "Pinnacle Ridge" et d’en observer le côté Sud : environ 32 m le 8 mai (sol 4178) et environ 25 m le 10 mai (sol 4180).
POSITION AU 10 MAI 2024 (SOL 4180) :
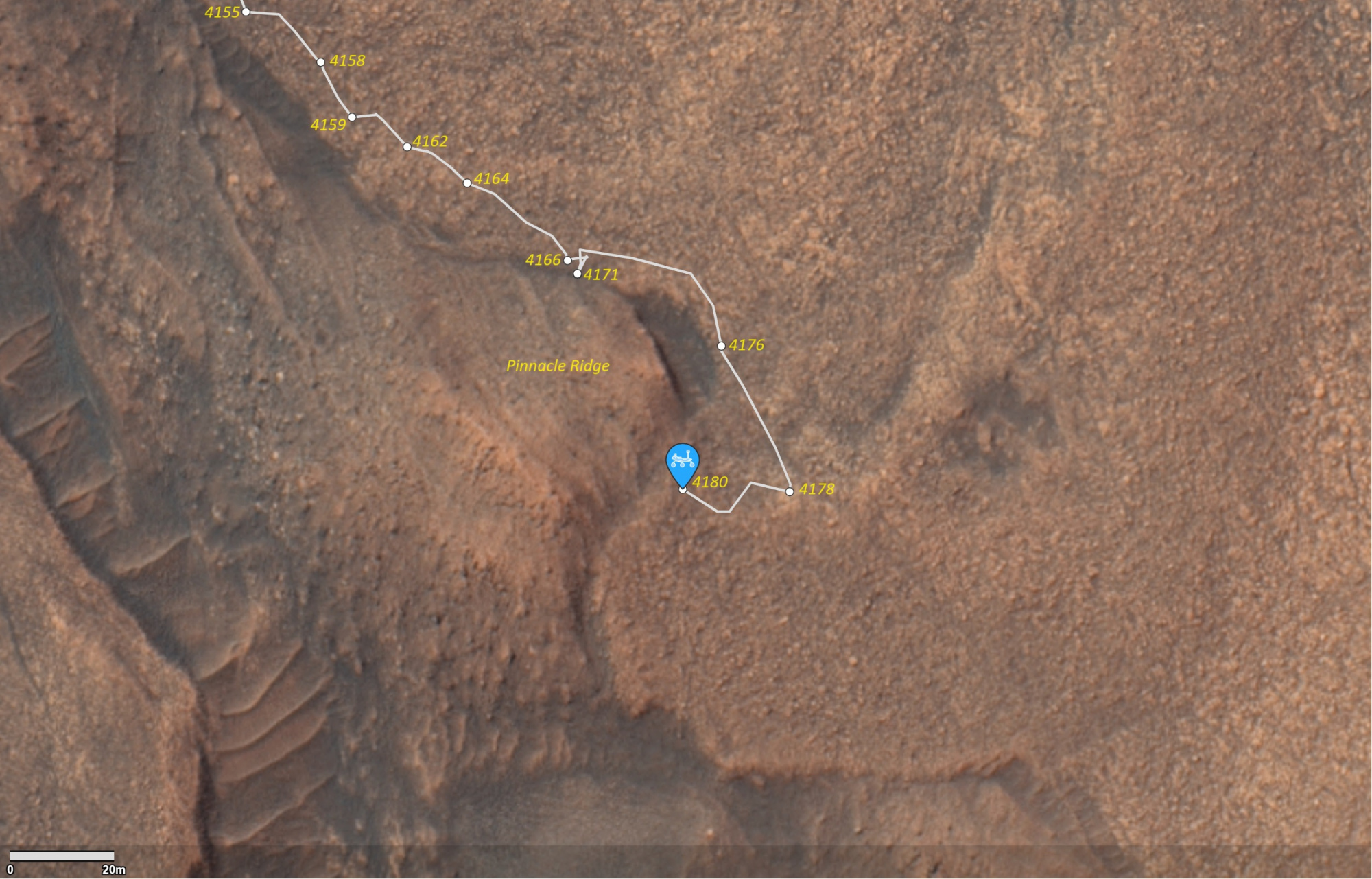
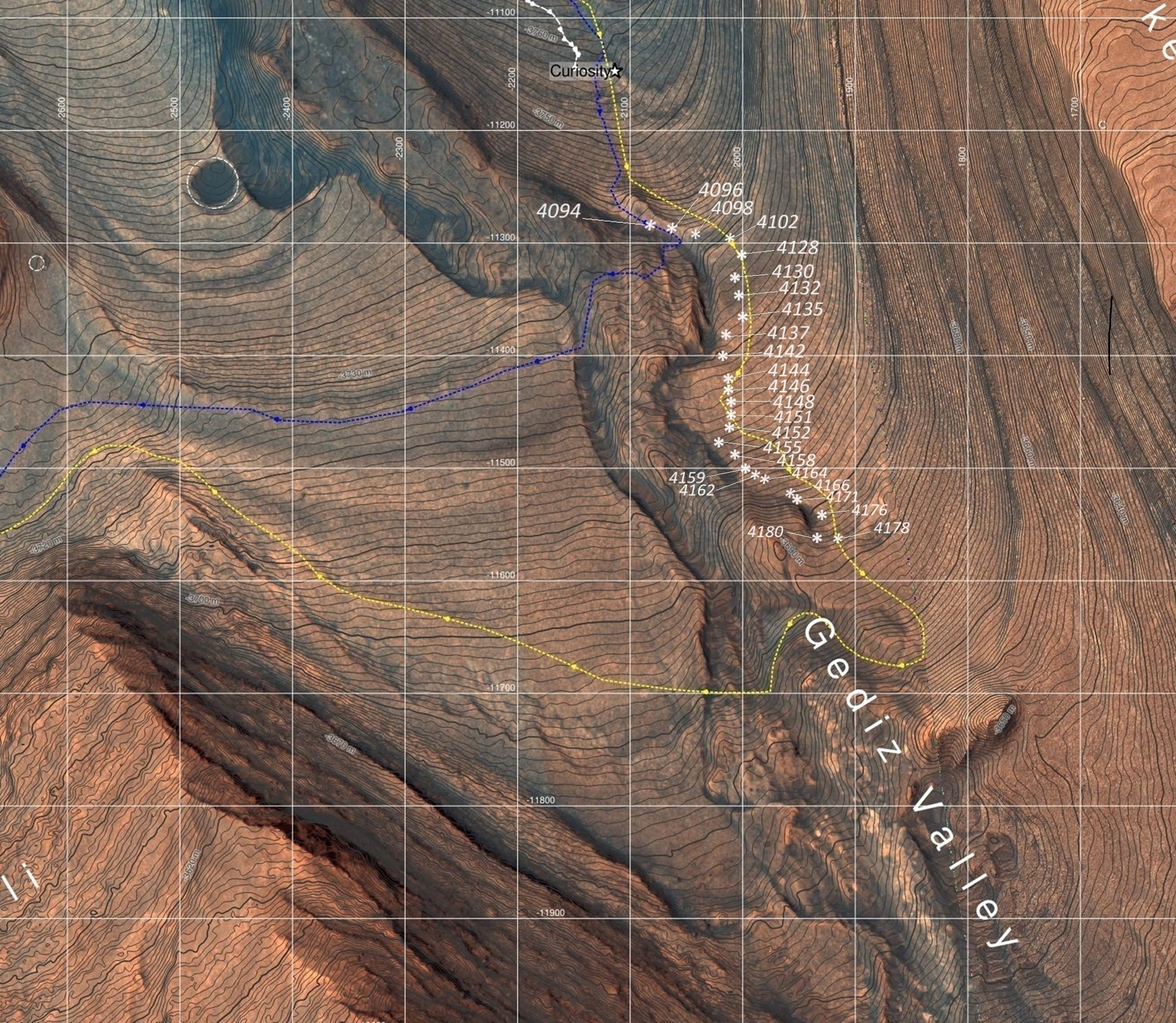
POSITION RELATIVE AU TRAJET PRÉVISIONNEL :
Je cite Sharon Wilson Purdy, géologue planétaire :
"Mastcam a planifié une grande mosaïque pour imager le haut et le bas de l'escarpement de Pinnacle Ridge, en complément de la mosaïque Mastcam qui a été acquise au cours du week-end. ChemCam a inclus une image RMI à longue distance de la face de la crête avec des variations de tons et de textures intrigantes. Le bloc scientifique ciblé sur le sol 4178 comprend également une mosaïque MAHLI d'une roche stratifiée intéressante dans notre espace de travail, "El Portal", qui sera caractérisée et imagée par ChemCam LIBS et Mastcam. Enfin, Mastcam prendra une petite mosaïque d'une roche dans l'espace de travail "Bairs Creek" pour étudier les textures et les caractéristiques intéressantes créées par le vent.
Bien que les grandes roches inclinées à venir rendent le trajet difficile, l'excitation est à son comble alors que nous poursuivons notre ascension le long de la marge de la crête supérieure de Gediz Vallis !"
HAZCAM AVANT – 8 MAI 2024 (SOL 4178) :

NAVCAM - 8 MAI 2024 (SOL 4178) :

À gauche de l'image on observe l'extrémité basse de "Pinnacle Ridge" que le rover vient de dépasser (noter les traces de roues)
C'est franchement pas l'autoroute

PANO NAVCAM - 8 MAI 2024 (SOL 4178) – Jan van Driel :
MAHLI - 8 MAI 2024 (SOL 4178) :
La roche stratifiée "El Portal"
Je cite Susanne Schwenzer, géologue planétaire :
"Quel spectacle magnifique que de voir toutes ces structures sédimentaires. Je suis géochimiste, mais j'entends l'excitation dans la voix de mes collègues spécialistes des sédiments, qui parlent de toutes ces textures et de toutes ces choses à voir. En général, ce sont ces caractéristiques qui nous permettent de déterminer ce qui s'est passé en termes de physique : Est-ce l'eau ou le vent qui a amené les grains jusqu'ici ? Quelle était la vitesse de l'écoulement ? Et puis... que s'est-il passé ensuite ? Cela relève peut-être de mon domaine d'expertise, car il faut que de nouveaux minéraux se développent entre les grains pour qu'un sédiment meuble devienne une roche. C'est ce que les études chimiques peuvent nous apprendre."
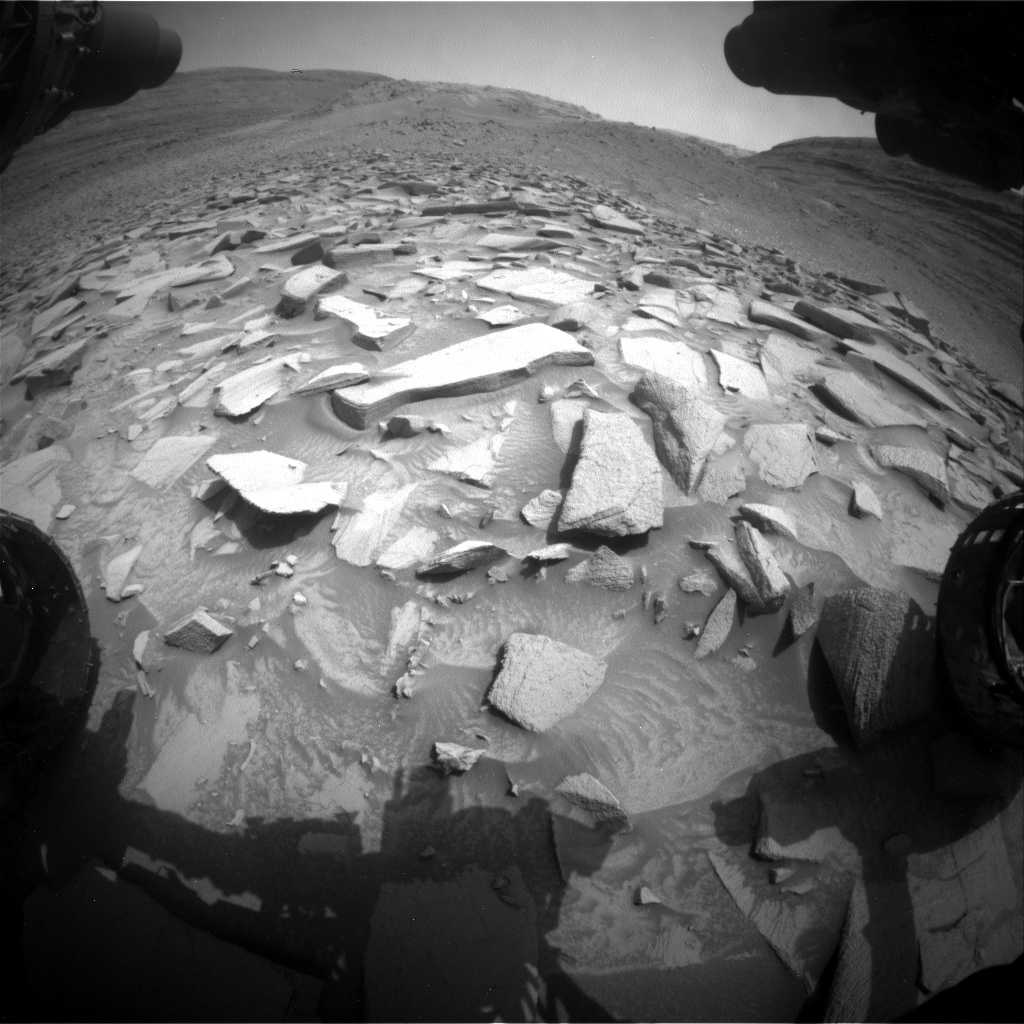
HAZCAM AVANT – 10 MAI 2024 (SOL 4180) :
Face au soleil et aux pentes côté Sud de "Pinnacle Ridge"- "Texoli" en arrière plan
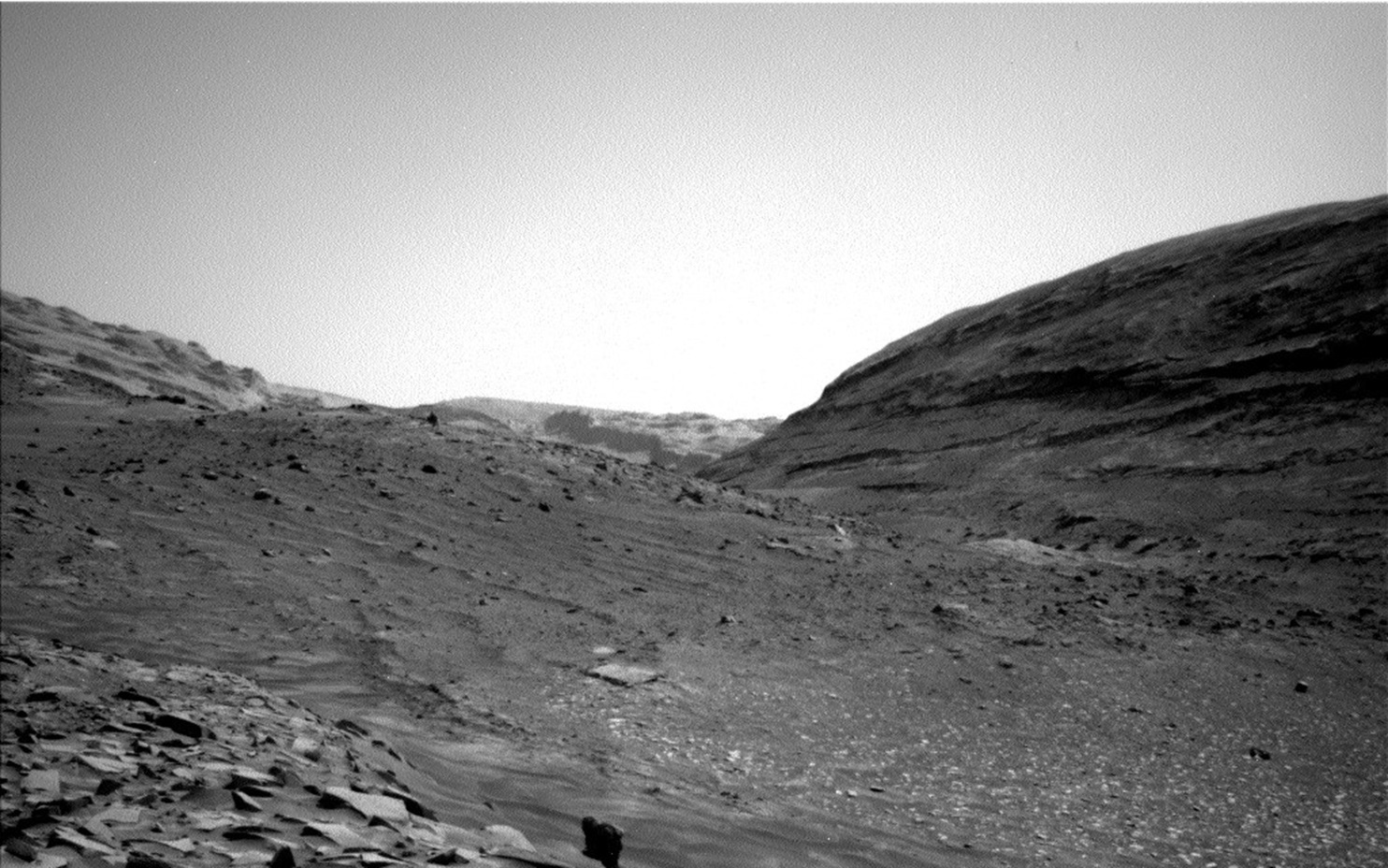
NAVCAM - 10 MAI 2024 (SOL 4180) :
Un environnement toujours aussi chaotique

Côté Sud de "Pinnacle Ridge" - En arrière plan à droite les buttes "Chenapau", "Deepdale" et "Oronico". Au loin, derrière la brume de poussières, la vallée et les remparts du cratère Gale
Au Sud vers le point de traversée à l'Ouest

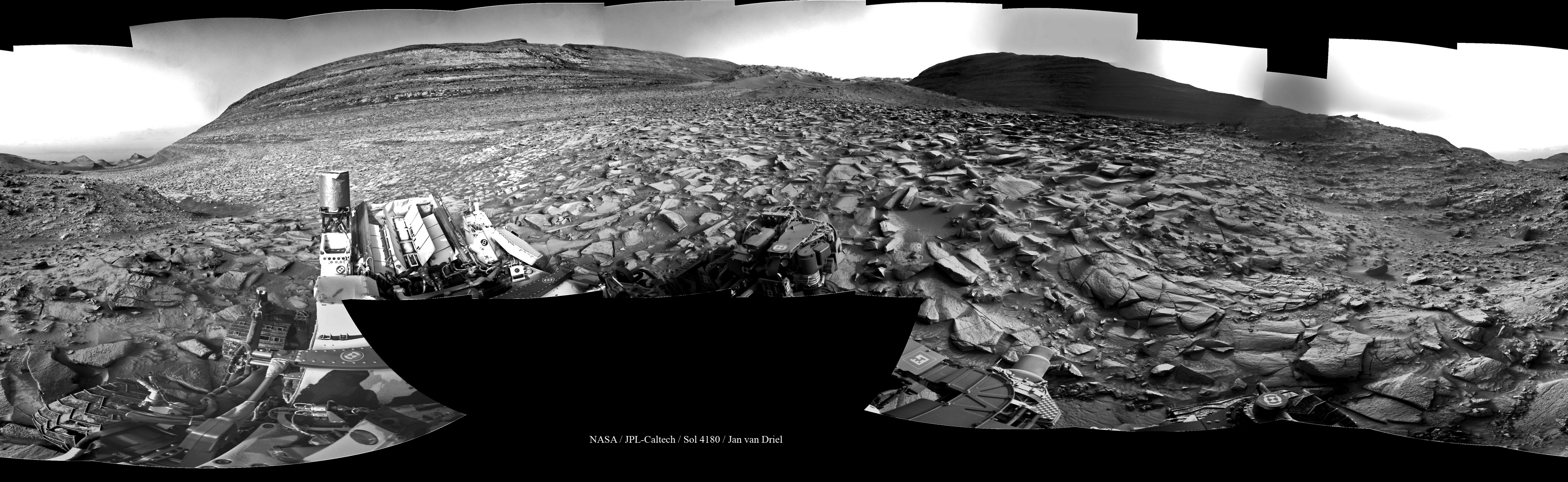
PANO NAVCAM - 10 MAI 2024 (SOL 4180) Jan van Driel :
Je cite Abigail Fraeman, géologue planétaire :
"Curiosity est maintenant stationné sur le côté sud de la "crête Pinnacle", la dernière zone de l'arête supérieure de Gediz Vallis que nous avions prévu d'étudier avant de traverser le canal de Gediz Vallis. Nous avons visité le côté nord de la crête Pinnacle la semaine dernière et recueilli toutes sortes de données qui nous en disent long sur la composition et la texture des roches qui forment la crête."
"Ce matin, nous devions prendre une décision importante : Maintenant que nous pouvons voir que le côté sud de la crête de Pinnacle est traversable, devrions-nous nous y rendre pour obtenir des données scientifiques de contact supplémentaires sur les roches de la crête de Gediz Vallis, ou devrions-nous continuer à rouler le long du canal de Gediz Vallis vers le point de traversée du canal que nous avons prévu ? Conduire sur l'arête Pinnacle à cet endroit pourrait nous permettre d'en savoir plus sur les matériaux qui composent l'arête et sur le rôle de l'eau dans cette région, mais cela pourrait aussi prendre plusieurs sols et ne pas nous apporter beaucoup plus que ce que nous avons déjà appris lors de nos recherches sur la face nord de l'arête Pinnacle."
"Mon rôle aujourd'hui était celui de planificateur à long terme, ce qui signifie que je devais diriger la discussion de l'équipe pour peser le pour et le contre de cette décision et (idéalement) aider le groupe à parvenir à un consensus. Nous avons beaucoup parlé de la comparaison entre les roches que nous pouvions voir depuis notre emplacement actuel et celles que nous avions déjà étudiées du côté nord. Finalement, les quelque 25 scientifiques qui faisaient partie du groupe de planification des opérations tactiques aujourd'hui ont décidé par consensus qu'il valait mieux passer à autre chose plutôt que de passer plus de temps ici."
"Aujourd'hui, nous allons donc collecter un grand nombre d'observations Mastcam, puis nous continuerons à remonter et à longer le canal, en nous dirigeant à ~23 mètres vers le sud-ouest."
"Avant de partir, nous profiterons de l'occasion pour pratiquer des analyses de contact sur les roches à nos pieds, en faisant un brossage DRT suivi d'observations APXS et MAHLI sur la cible nommée "Boyden Cave", des observations APXS et MAHLI sur une cible voisine (poussiéreuse) nommée "Royal Arches", et enfin une cible MAHLI seulement d'une roche voisine cool nommée "Quarry Peak". Nous recueillerons également deux observations ChemCam LIBS sur "Otter Lake", une cible très proche de Royal Arches, et une autre roche proche nommée "Nevada Falls". Une série d'observations de surveillance de l'environnement viendra compléter le plan."
FIN DE CITATION
Curiosity va donc poursuivre sa route vers le Sud en demeurant probablement assez proche du trajet prévisionnel. Il n'est plus qu'à une centaine de mètres du point prévu pour tenter de traverser le canal en se dirigeant vers l'Ouest pour quitter la vallée et atteindre les contreforts de la butte Texoli pour découvrir d'autres formations et des paysages sans doute assez différents.
-
4
-
6
-
-
Il y a 6 heures, VNA1 a dit :C'est déjà assez difficile de suivre certains sujets, mais pourquoi ajouter tes conneries au sujet que l'on essaye de comprendre?
Moi aussi je t'aime véhène à one
C'était surtout un clin d'oeil en hommage à Victor Wembanyama (20 ans), jeune basketteur français qui joue chez toi en ligue NBA et qui vient d'être distingué comme meilleur débutant (rookie) de la saison.. Cocorico !!
Quant au sujet de "comprendre".. tiens.. CADEAU à lire
 :
:
-
1
-
-
Il y a 2 heures, jackbauer 2 a dit :« Les trous noirs de masse stellaire, qui contiennent jusqu’à environ 30 masses solaires, possèdent des horizons d’événements beaucoup plus petits et des forces de marée plus fortes, qui peuvent déchirer les objets en approche avant qu’ils n’atteignent l’horizon. »
Cela se produit parce que l’attraction gravitationnelle à l’extrémité d’un objet plus proche du trou noir est beaucoup plus forte que celle à l’autre extrémité. Les objets qui tombent s’étirent comme des nouilles, un processus que les astrophysiciens appellent la spaghettification.
Manifestement certains ont connu ce phénomène et s'en sont sortis indemnes... si si.. la preuve avec notre incroyable Victor !!

-
2
-
-
Il y a 2 heures, bon ciel a dit :« Dites-moi que la distraction qu’Elon pourrait avoir sur Twitter n’affectera pas SpaceX », a dit Bill Nelson
Punaise !.. même le Big Boss de la Nasa s'y met.. pffff..
. Honte à lui !!
Je ne comprend vraiment pas cet acharnement contre notre Guide, l'Homme Multiplanétaire du Futur (au cerveau bientôt interconnecté !).

-
3
-
-
Pour mémoire, à l'usage Curiosity a rencontré de multiples problèmes de fonctionnements, ceci dès le début de son périple il y a plus de12 ans.
Dès l’atterrissage le 6 août 2012 un capteur de vent de la station météo miniature REMS (Rover Environmental Monitoring Station) située sur le mât) est mis HS par la projection d’un caillou - Désordres informatiques avec la mémoire flash de l’ordinateur A dès le 27 février 2013 obligeant à basculer sur l’ordinateur B… pour y revenir plus tard suite à une anomalie de mémoire sur celui-ci en septembre 2018 - Découverte de la dégradation prématurée des roues en 2013 - Courts circuits dans le MMRTG en 2014 - Courts-circuits dans le mécanisme de percussion depuis début 2015 – Usure des freins aux articulations du bras robotique Novembre 2021 (obligeant à la minimisation de l’utilisation de la percussion pour les forages) – ChemCam : signes de faiblesse d’une minuscule diode utilisée dans le mode autofocus en Novembre 2014, focalisation désormais manuelle - Laser ChemCam : Janvier 2021 instabilité de la haute tension requise pour déclencher le laser (le nombre d’activités planifiées est désormais limité pour éviter que les instruments ne chauffent trop).
Et surtout, système de forage HS en décembre 2016 (reprise des forages en mai 2018 avec une nouvelle technique (feed extended drilling) - Dégradation prématurée des thermocouples du MMRTG (perte de 1 watt tous les 80 sols (épuisement d’énergie prévu fin 2025)… MastCam gauche : roue à filtre bloquée à l'automne 2023, occultant plus de la moitié de l’objectif, nécessité de sous-cadrer les images pour éviter que le matériel de la roue à filtre n'apparaisse, en conséquence la taille des images MastCam Left couvre moins de la moitié de ce qu'elle couvrait auparavant. La caméra demeure utilisable, même s'il faut environ 2,5 fois plus d'images pour acquérir des panos.
Par ailleurs Curiosity s’est sorti une bonne dizaine de fois de situations parfois délicates, genres ensablements.. dérapages en montées.. blocages de roue contre un gros bloc.. etc..
Aujourd’hui, sans vouloir lui porter la poisse, après près de 32 km parcourus et avoir utilisé ses instruments des milliers de fois, je suis assez bluffé de voir le rover continuer sa mission assez allègrement et sans trop souffrir de problèmes récurrents.
Dommage que le JPL ne fabrique pas lave-linges, lave-vaisselles, TV etc..
Par expérience et depuis toutes ces années, je pense que l’équipe ne nous rapporte pas toujours tout le menu détail des ennuis, petits ou grands. En fait on en a souvent connaissance à postériori. Pour autant la longévité et l’endurance de ce "reporter" aux 17 caméras et de ce laboratoire sur roues aux dix instruments complexes et relativement fragiles sont remarquables. Sachant que l’environnement martien est plutôt hostile (températures extrêmes, bombardement rayons cosmiques et solaires, sol acide, poussières, cheminement sur sol rocheux et le plus souvent en montées assez rudes..). Noter toutefois que la quasi absence d’oxygène et d’eau est bien sûr décisive pour éviter tous les phénomènes d’oxydation, très actifs et très nuisibles sur Terre.
Preuve que Curiosity est toujours bien opérationnel, le 5 mai (sol 4176) il a parcouru 42 mètres, ce qui est une performance car il est toujours en montée et sur un terrain couvert quasi uniformément de gros blocs rocheux parfois anguleux.
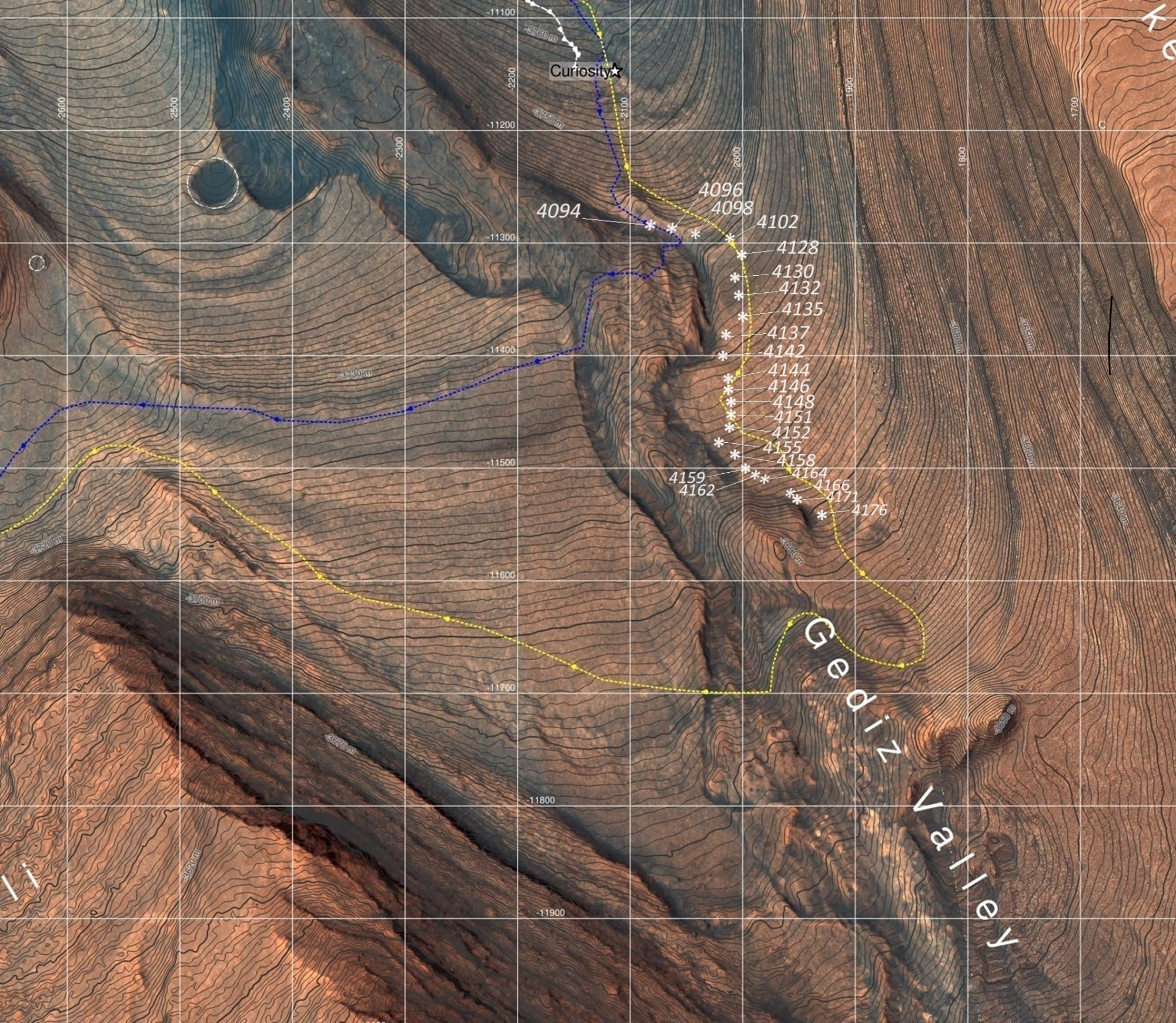
POSITION AU 5 MAI 2024 (SOL 4176) :
Curiosity poursuit sa route parallèlement au canal et ainsi contourne "Pinnacle Ridge" pour continuer son périple afin d'atteindre plus haut un point de passage vers "Texoli", probablement celui proposé par le trajet prévisionnel (un point de passage qui ne semble pourtant pas vraiment une partie de plaisir) .

CONTEXTE :
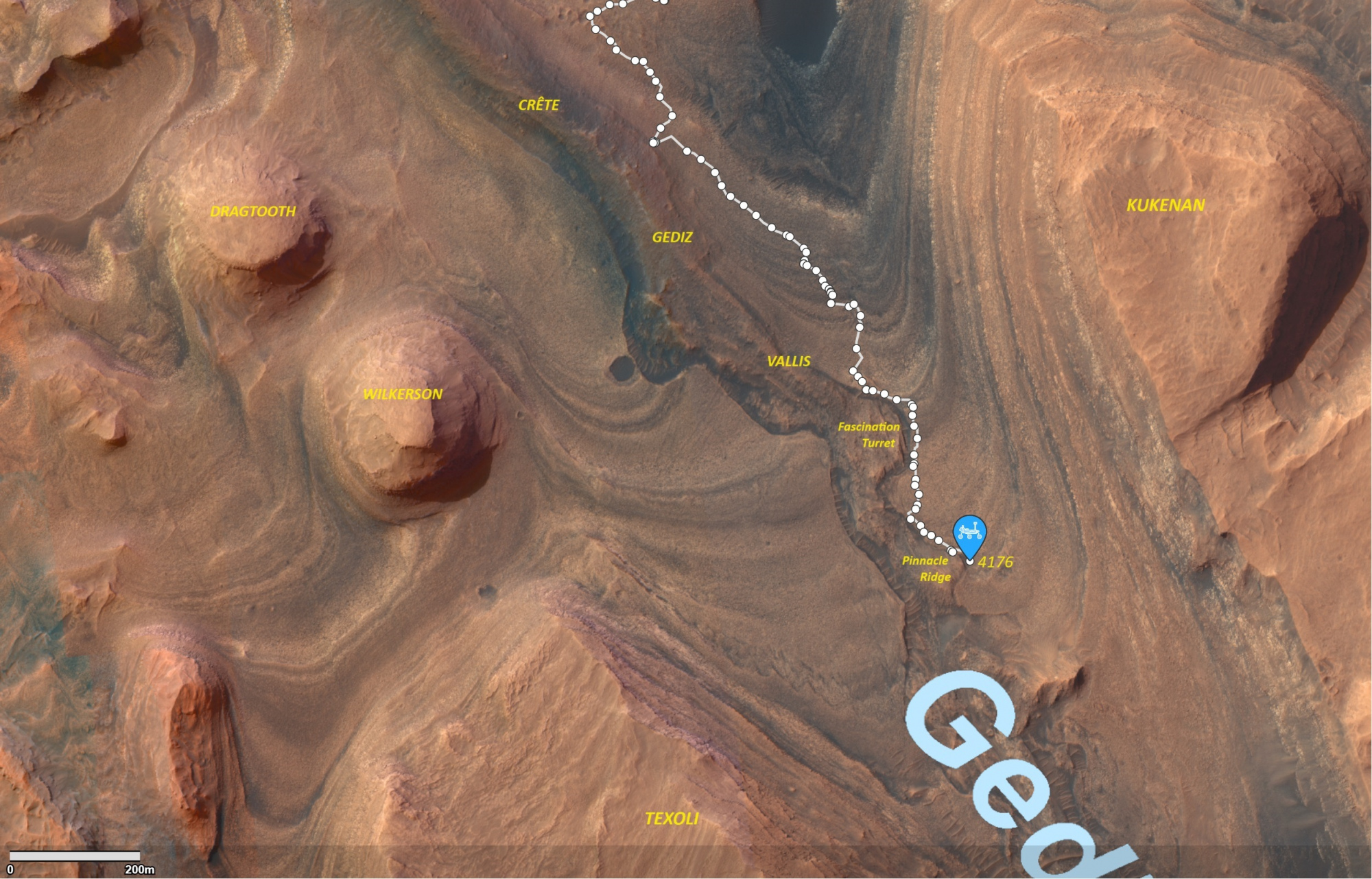
POSITION RELATIVE AU TRAJET PRÉVISIONNEL :
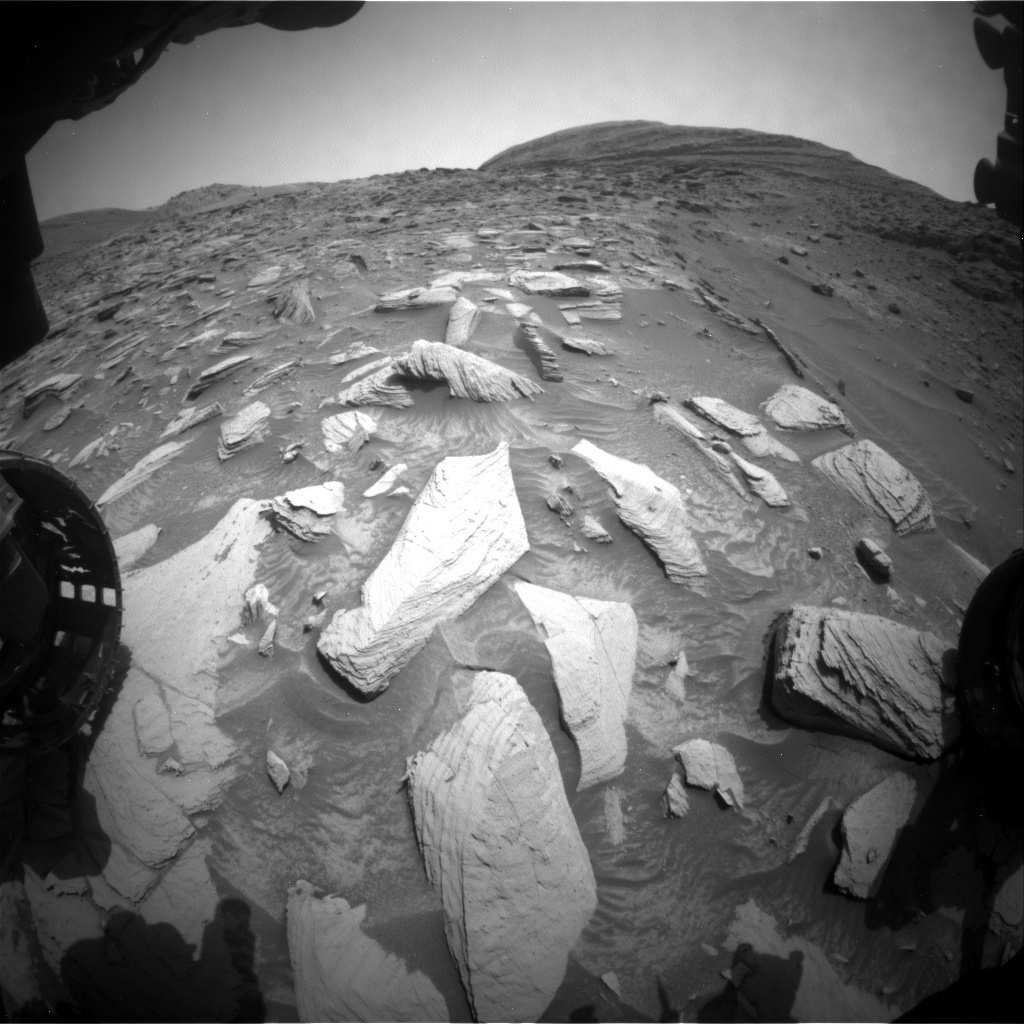
HAZCAM AVANT - 5 MAI 2024 (SOL 4176) :
HAZCAM ARRIÈRE - 5 MAI 2024 (SOL 4176) :
La roue arrière droite perchée sur une roche
NAVCAM - 5 MAI 2024 (SOL 4176) :

Toujours ces majestueuses rides de sable


Les traces de roues apparaissent entre les roches dans un chemin qui n'est pas vraiment "pavé de bonnes intentions"
Le canal ensablé et "Pinnacle Ridge" à gauche - Plus loin les buttes "Wilkerson" et "Dragtooth"

Espace de travail devant le rover

La butte "Texoli" apparaît en dépassant "Pinnacle Ridge" (visible en avant plan à l'extrême droite de l'image)
PANO NAVCAM - 5 MAI 2024 (SOL 4176) – Jan van Driel :
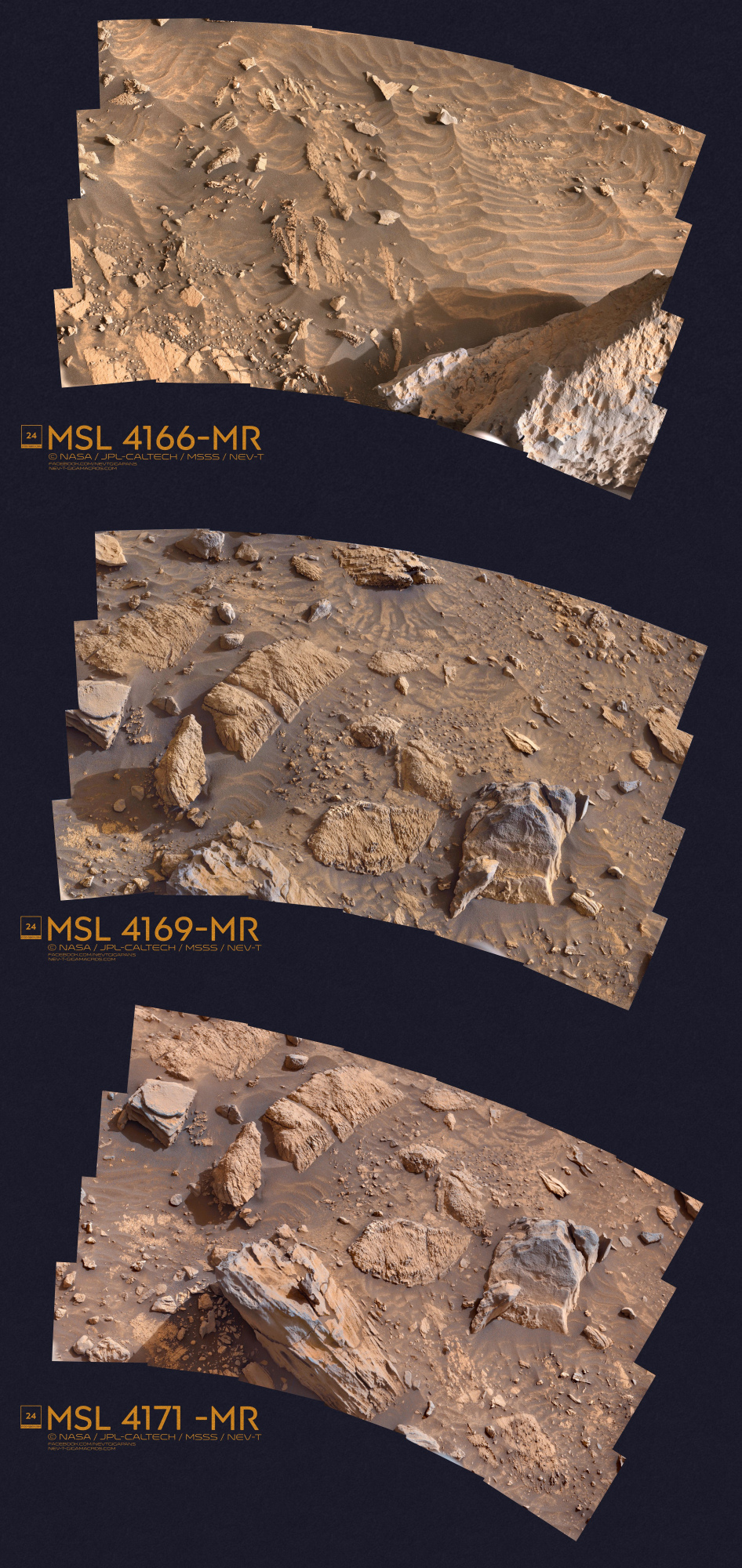
MOSAÏQUES MASTCAM - Neville Thompson :
25&27 et 30 MAI 2024 (SOLS 4166 - 4169 - 4171)
Espaces de travail successifs devant le rover
https://www.gigapan.com/gigapans/234717
27 AVRIL au 3 MAI 2024 (SOLS 4168 au 4173)
"Pinnacle Ridge"

-
2
-
4
-
2
-
-
Il y a 2 heures, Superfulgur a dit :Alors arrêtez votre fixette sur monsieur musc, prenez un Quaalud, un Tranxène, un Témesta et un Lexomil,
ET ÇA MARCHE !!!!!!!
...........
-
4
-














.jpg.8afa346fae6daa33ba5d85eeb979b197.jpg)














Thomas Pesquet sur le départ...
dans Astronomie générale
Posté(e)
Qui en met plein la vu.ve !!

Je vous recommande vivement ce moment d'humour et de dérision, le seul remède efficace contre la sinistrose actuelle..
Il est question de "Phryge" à 4mn20, mais la vidéo mérite vraiment d'être visionnée en totalité..