

NicoF
-
Compteur de contenus
238 -
Inscription
-
Dernière visite
-
Last Connexion
Soon available - 81948
Messages posté(e)s par NicoF
-
-
Bonsoir
Merci à tous pour vos commentaires et réactions, malgré la qualité, loin des chefs d'oeuvre de cette belle cible que j'ai pu voir passer sur le forum.
à très bientôt
Nicolas
-
Bonsoir,
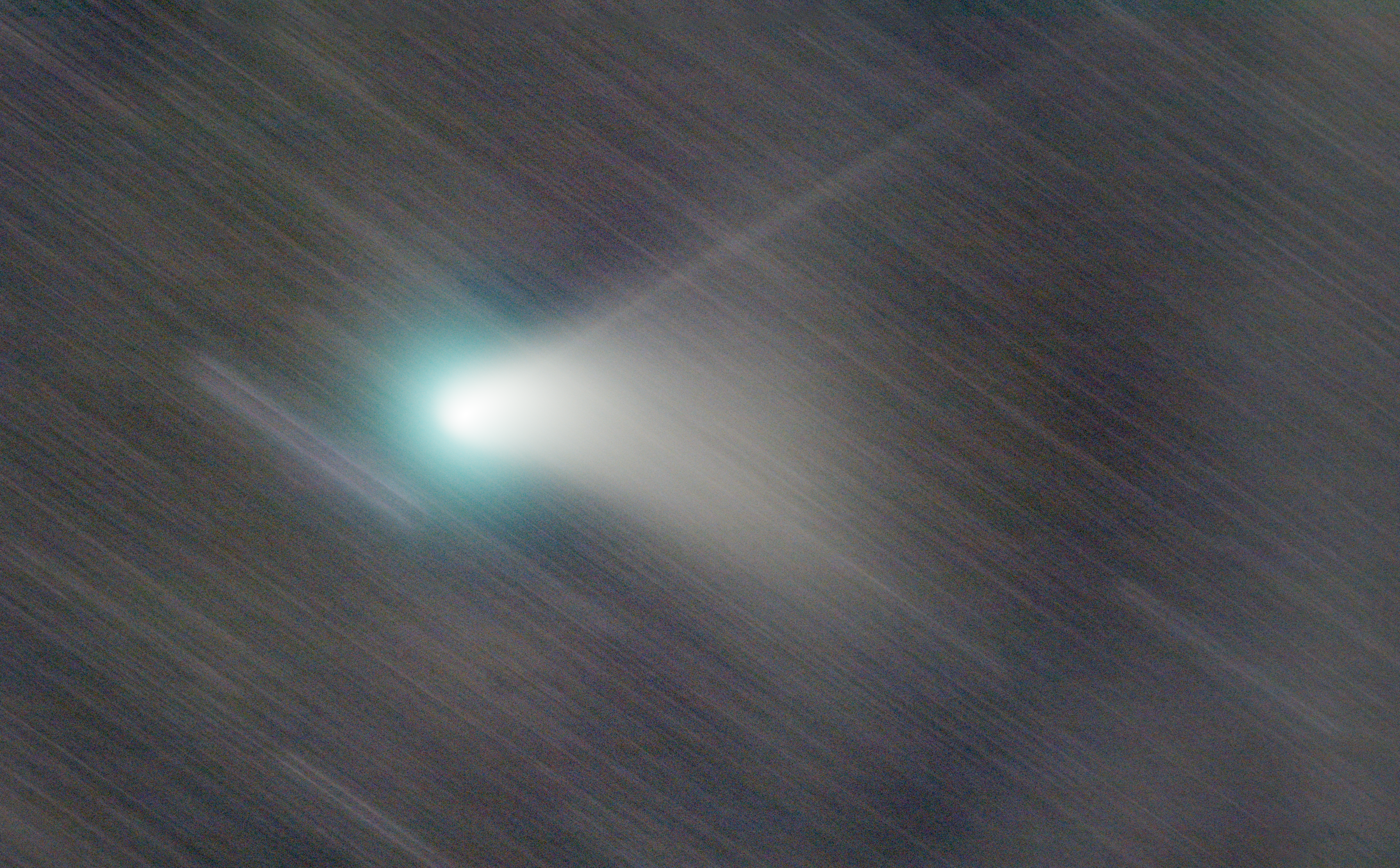
De retour après quelques mois de pause astro.
J'ai réussi à trouver un créneau météo glacial pour imager la fameuse comète. Les images datent du 12 février, le délai avant de poster est essentiellement lié à la galère pour le traitement.
Au niveau du matériel :
* N130/900 sur HEQ5
* A7S
Pour le logiciel, la nouvelle version de SIRIL qui est absolument extraordinaire.
J'ai suivi les instructions du guide : https://siril.org/fr/tutorials/comet/
Notamment la partie superstack pour la vidéo.
J'ai réalisé 5h de pose avec des temps d'acquisition unitaire de 20s.
Donc tout d'abord une animation:
Ensuite un empilement centré sur la comète:
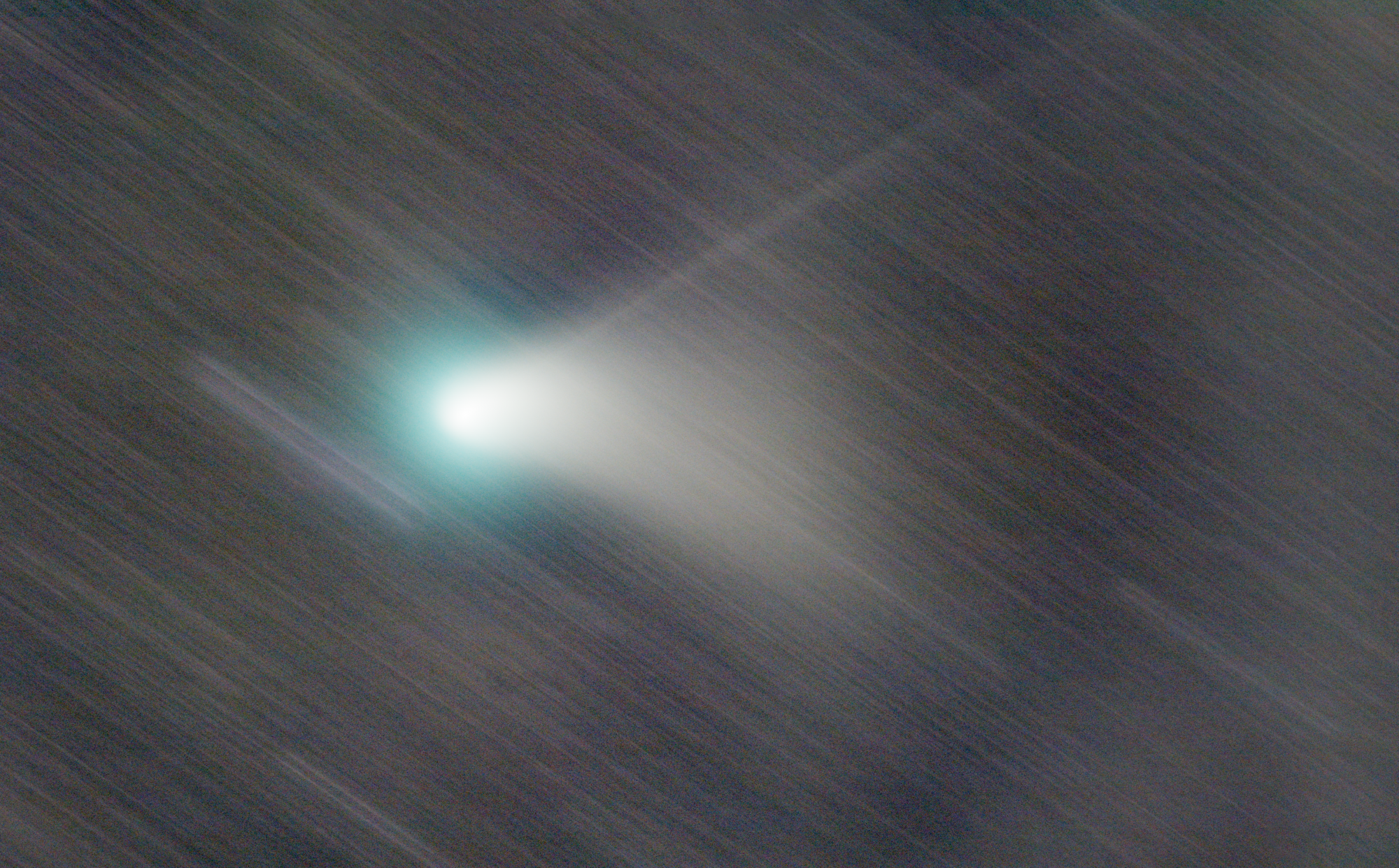
Une combinaison du fond de ciel avec la comète :

La même en tirant les curseurs qui dévoile la queue ionique mais aussi la "supercherie" de l'empilement des 2 images :

Voilà, bien loin de ce que j'ai pu voir passer ici mais pour une première je suis pas si mécontent.
Bonne soirée,
Nicolas
-
 8
8
-
 1
1
-
-
Bonsoir
J'ai rencontré ce type de problèmes L'une des difficultés est la lenteur de la démarche essai / erreur avant d'arriver à quelque chose de fonctionnel (et les rares belles nuits gachées à tester sa monture au lieu de faire des photos).
Je te conseille ce script permettant de tester l'effet de chaque réglage.
Bonne soirée,
Nicolas
-
Bonjour
Pour le moteur il y a aussi les moteurs direct drive des machines à laver de marque LG en pièce de rechange on en trouve à une 100aine d'euros.
Pour le codeur, à ma connaissance, il faut passer par de l'incrémental Sin/Cos pour monter en résolution avec un arbre creux pour le viseur polaire on est plutôt dans la gamme de quelques milliers d'euros.
En absolu je n'ai jamais vu des résolutions de 16 millions de pas si tu as une réf je suis preneur.
Bonne soirée,
Nicolas
-
Bonjour
Ne lâche pas tu vas y arriver et tu auras un tracking nickel à la sortie, bien meilleur qu'avec du pas à pas.
Donc quelques suggestions complémentaires
Le 9/30/2022 à 15:50, barbu a dit :@Gilles : Je vais essayé la double intégration.
- Une intégration simple permet d'annuler l'erreur statique :
On comprend bien ce qui se passe en prenant en compte le seuil de démarrage du moteur : Lorsque la cible est presque atteinte, l'erreur est faible et la commande envoyée est inférieure à ce seuil. Le moteur ne bouge plus et pourtant la cible n'est pas atteinte.
- La double intégration permet d'annuler l'erreur de poursuite à vitesse constante.
Cependant dans notre cas la vitesse est tellement faible par rapport à la dynamique que l'approximation statique est bonne. Je ne pense pas qu'une double intégration apportera un plus.
Le 9/30/2022 à 15:50, barbu a dit :J'ai essayé ta proposition et comme je le pensais l'appel de la routine toute les 5ms ne se fait pas. J'ai donc divisé par 2 le temps pour appeler de cette interruption qui basculer le flag d'autorisation de faire les calculs de PID et je n'incrémente la position telescope qu'au bout de ces 2 appels à la routine calcul de la PID. J'appel donc les calculs toutes les 9ms. Mais ça ne marche pas, je ne suis pas sure que les calculs prennent moins de 9ms.
Je doute que les calculs prennent plus de 10ms, il n'y a quasiment rien dans le boucle.
Regarde au moins avec ton oscillo si les pas de temps de ta boucle sont bien constant.
Le 9/30/2022 à 15:50, barbu a dit :Pour la limitation de la valeur intégration cela à pour effet de bloquer cette valeur à 5 puisque les erreurs sont toujours positives et que leur sommes ne cessent d'augmenter donc je mette 0 ou 1000 au coefficient Ki j'ai toujours Cmdi bloquée à la valeur de la saturation. Et la le système oscille en tout ou rien la commande est soit 0 soit 255 avec une frèquence de 200ms.
Dans ce cas il faut que tu augmentes fortement la valeur de saturation (50 au lieu de 5 par exemple) mais tu devrais en laisser une cela permet d'augmenter la stabilité et donc d'augmenter la valeur de Ki
Idem pour la purge de l'erreur si l'erreur change de signe.
Ligne 120 :
if (erreur_precedente * erreur<0) somme_erreur=0;
Le 9/30/2022 à 15:50, barbu a dit :D'autre part, je ne comprend toujours pas pourquoi lors de l'interruption générée par le codeur voie B je n'arrive pas à avoir la bonne valeur du niveau logique de A pour déterminer le sens.
Je comprends pas trop non plus mais c'est fondamental ca te permettra de doubler la résolution et tu en a grand besoin à cette vitesse.
Hypothèses : un rebond dans la descente du front : la valeur de PIND change pendant le if (essaye de regarder au scope si tu vois un rebond
Solution possible
A. utiliser une variable intermédiaire pour ne lire qu'une fois le port
Remplacer :
if ((PIND & 0b00000100) != (PIND & 0b00001000))
positMoteurSB--;
else
positMoteurSB++;par
unsigned byte portD=PIND;
if ((portD & 0b00000100) != (portD & 0b00001000))
positMoteurSB--;
else
positMoteurSB++;B. Une capa (1nF) entre la masse et la voie B
Bon courage
Nicolas
-
Bonsoir,
J'ai regardé le code. Je te propose dans un premiers temps les modifs suivantes :
1. fréquence d'asservissement.
Il est important de maîtrise la fréquence d'asservissement et que cette fréquence ne soit pas trop rapide par rapport à la dynamique du système.
Je propose de commencer par tester à 5ms.
C'est l'objet de la modif dans le timer et dans la boucle principale la variable servoTrigger permet de déclencher la boucle toutes les 10.000 coups de timer
Après cette modif tout tes réglages de gains seront à revoir;
2. Saturation et annulation d'intégrateur
Les problèmes de seuils de démarrage du moteur que tu rencontres se règlent normalement avec l'intégrateur (I du PID).
Simplement il faut lui ajouter 2 éléments sinon il va rendre rapidement la boucle instable dès que tu vas monter le gain :
i. Une saturation (A ajuster) qui bloque la valeur pour l'empecher de dépasser un seuil (paramètre SautrationI)
ii. Purger l'intégrateur lorsque l'erreur change de signe.
3. Filtrage de la dérivée.
La dérivée numérique est un filtre passe haut très bruité. Il faut lui ajouter un filtre passe bas pour lisser les valeurs.
C'est l'objet du paramètre deri vativeFilter à tester entre 0.1 et 0.8
Cela va te permettre de monter la valeur du gain.
Je vais regarder ensuite pour la partie estimateur de position, mais je pense que ces mofifs devraient déjà améliorer les choses.
Bonne soirée,
Nicolas
-
1
-
-
Bonjour
Harmonic Drive=réducteur sans jeu. Mécanisme très astucieux basé sur la déformation d'un engrenage.
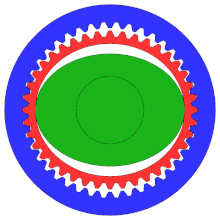
Le vert est lié au moteur, le bleu est fixé au bâti et le rouge est lié à la charge
https://fr.wikipedia.org/wiki/Engrenage_à_onde_de_déformation
Direct drive = pas de réducteur moteur en prise directe.
Permet un asservissement direct des axes mais nécessite des moteurs avec des couples élevés
et des codeurs de haute résolution
Nicolas
-
1
-
-
Bonjour
Un autre point m'est venu :
Le 9/23/2022 à 00:17, barbu a dit :Un pas du codeur représente environ 0.3" d'arc et donc en vitesse de suivie sidéral environ 53.47 pas par seconde soit environ 1/5 de tour par seconde.
Utilises tu les 2 voies du codeur : direct et quadrature, associé au comptage sur front montant et descendant, cette technique permet de multiplier par 4 le nombre de pas codeur.
Dans un tour tu as donc 1024 pas au lieu de 256.
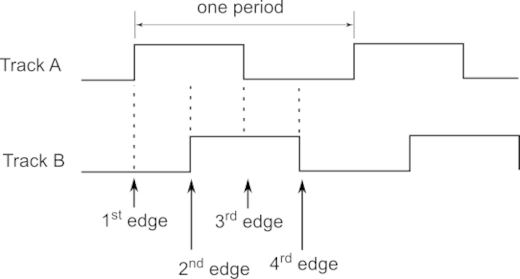
Sur Arduino, il faut que tu attaches une interruption de type "CHANGE" sur chacune des voies (direct et quadrature du codeur)
https://www.arduino.cc/reference/en/language/functions/external-interrupts/attachinterrupt/
Ensuite :
Sur l’interruption "CHANGE" de la voie A tu applique ceci

Sur l'interruption change Voie B :

Ca devrait améliorer significativement les performances de suivi, tiens nous au courant !
Bonne journée,
Nicolas
-
Bonsoir,
Oui il y a une astuce et c'est un beau défi pour la régulation.
Il faut mettre un filtre de Kalman pour estimer la position du moteur entre 2 pas du codeur.
Le filtre de Kalman permet d'évaluer la position du moteur en fonction de :
1. La dernier pas lu (information fiable mais lente)
2. Les ordres envoyés au moteur et sa réponse théorique (information rapide mais peu fiable).
Ainsi tu continues d'ajuster la PWM moteur en fonction de sa réponse théorique même entre 2 pas et la PWM n'est pas "à fond" dans la zone aveugle entre les 2 pas.
Ca marche bien.
Tu pourrais partager ton code Arduino pour que l'on puisse regarder.
A noter : C'est une bonne idée d'utiliser un moteur DC et non un pas à pas. Proprement régulé tu dois avoir un mouvement plus fluide et une consommation nettement inférieure.
Nicolas
-
1
-
-
Bonsoir
Merci a tous pour vos commentaires et pouces/coeurs.
@Achaim je vais tenter une version intermédiaire.
Bonne soirée
Nicolas
-
1
-
-
Pour un minimum c'est superbe.
J'ai hâte de voir les couleurs
Bonne soirée
-
1
-
-
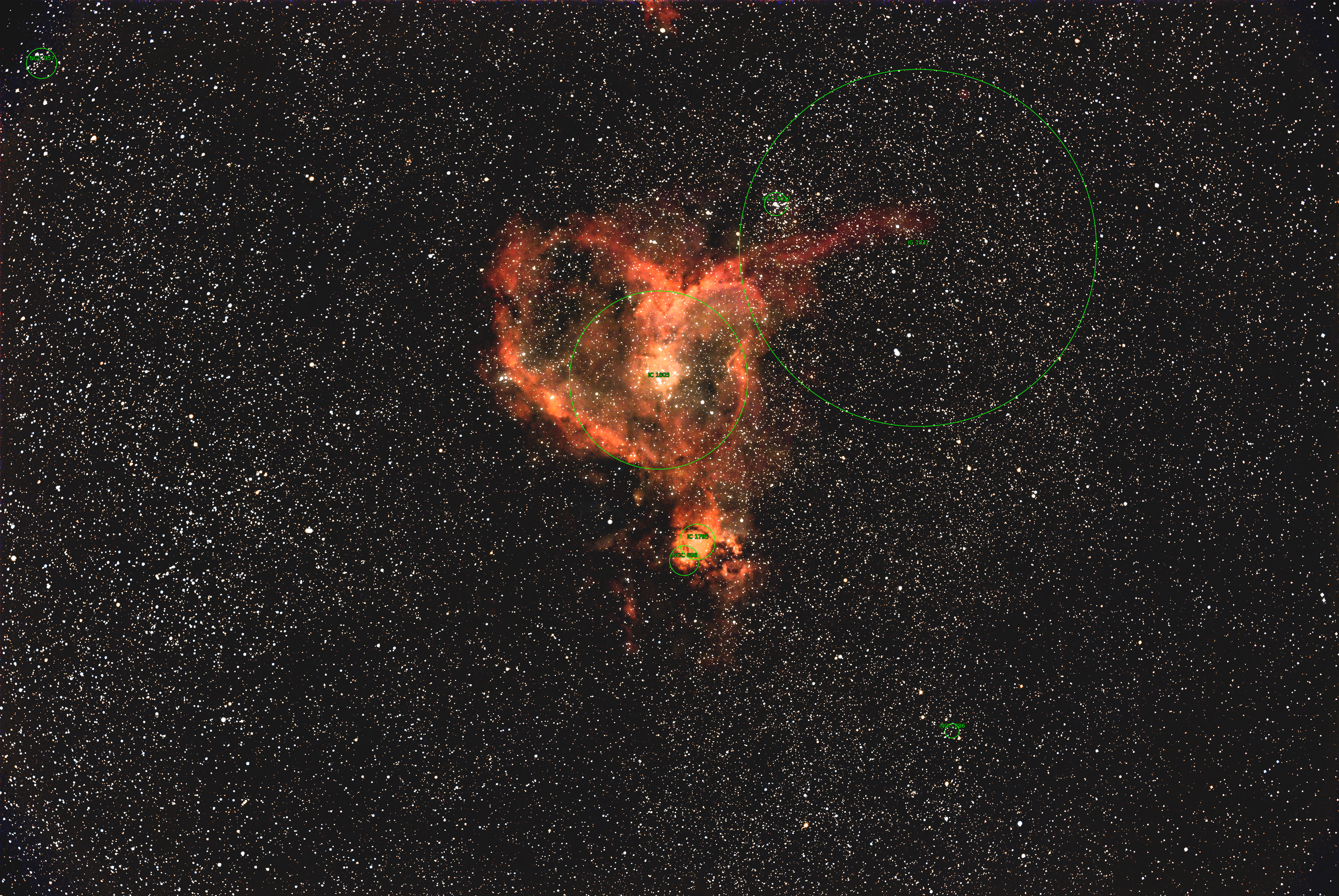
Bonsoir à tous,
Je vous propose, comme le titre peut le laisser penser la nébuleuse du cœur, certes classique pour beaucoup mais une première pour moi.
Sous un ciel superbe en Dordogne le WE dernier, j'ai commencé les poses juste après le couche de la lune vers minuit et j'ai pu accumuler jusqu'à l'aube vers 5h30 du matin;
Côté matériel
- Lunette TS61EDPH (Focale 274 avec correcteur intégré / F4.5)
- A7S défiltré ,
- HEQ5
Des poses de 30s
Voici pour l'ambiance:

J'en ai fait 2 versions :
- Une première assez nature, empilement et traitement avec SIRIL puis quelques ajustements sous GIMP
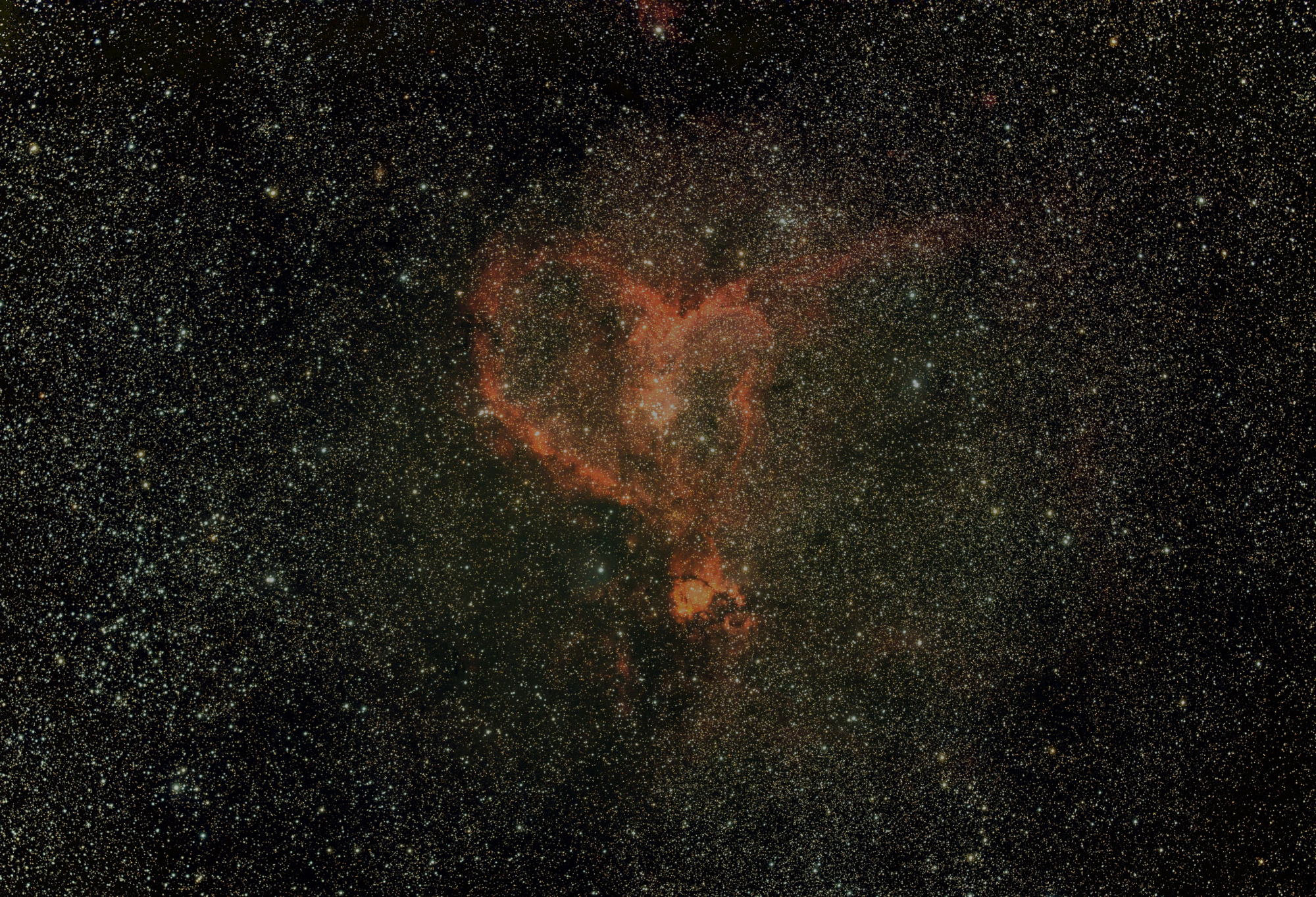
Puis une autre version avec réduction d'étoile pour faire ressortir la nébuleuse:

Un coup d'astrometry.net qui révèle un discret NGC 886
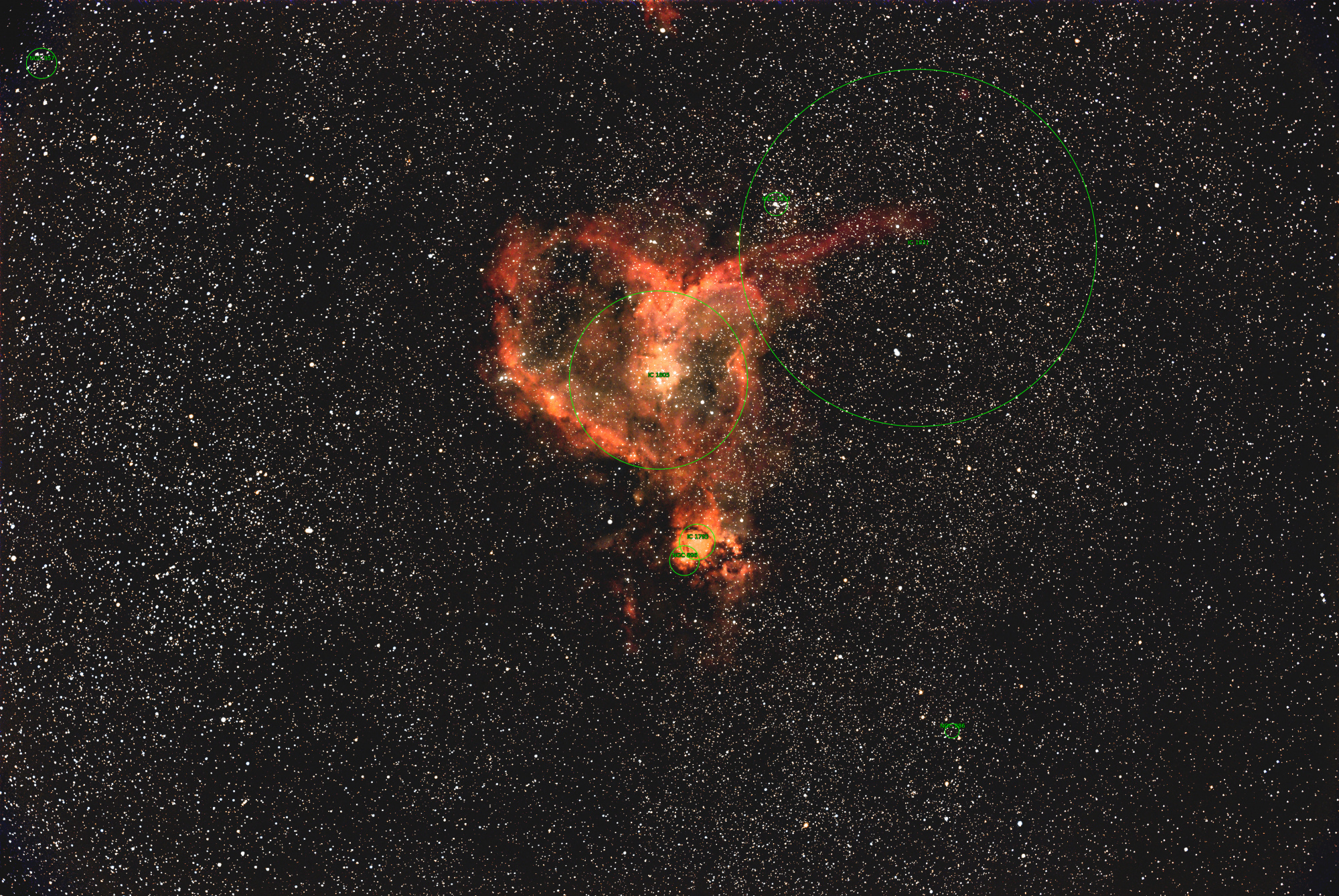
Vos critiques et commentaires sont bien sûr les bienvenus.
Bonne fin de journée,
Nicolas
-
8
-
4
-
-
Bonjour
J'ai le 14 mm f/2.8 sur un A7s1.
J'en suis satisfait.
A noter:
-Il faut fermer de 1 a 2 crans le diaphragme pour ne pas avoir de coma dans les coins.
- En photo de nuit je pense que la map manuelle est obligatoire.
De jour en revanche c'est une contrainte mais les fonctions d'assistance à la mise au point de l A7s aident bien.
- Une forte distorsion lié au grand angle (voir le filet d'étoiles ci dessous)
Nicolas
Levé de Lune

File d'étoile, on note la distorsion

Voie lactée avec defiltrage. Objectif trop ouvert voir coma en haut à gauche.

Voie lactée avant defiltrage

-
 1
1
-
-
30s c'est la limite max avant le déclenchement de l'algo de réduction de bruit sur l'A7s (star eater).
Normalement ça passe en suivi avec ma monture mais sur la Bulle il y a eu un problème et j'aurais dû faire moins.
Et pour l'autoguidage je ne m'y suis pas encore mis. Je suis un peu rebuté a l'idée d'alourdir le setup (câbles, cam, lunette)
Merci en tout cas de ton passage.
Nicolas
-
1
-
1
-
-
Merci @ALAING, merci @guy03.
Le drap sur le tube c'est pour le protéger des oiseaux qui adorent le bombarder au petit matin.
Bonne journée
Nicolas
-
1
-
1
-
-
Bonjour
Merci @ALAING de ton sympathique message.
Voici quelques compléments de cette reprise.
D'abord un filet d'étoile A7S + Samyang 14mm, "légère" distorsion induite par l'objectif
Puis un lever de pleine Lune, même conf, on note les étoiles en haut à gauche
Puis une tentative a peine présentable de la Bulle (NGC7635)
Mais d'abord, le matériel :
N130/900 + A7S

Et la Bulle avec :
- Une collimation qui a bougée sans que je ne déplace le matériel ???,
- un problème de suivi
et ... le gradient induit par la Lune très difficile à retirer.
Un Crop

Et l'horrible Full, à regarder de loin sur un petit écran

Bonne journée,
Nicolas
-
1
-
-
Bonjour à tous,
De retour à l'astro après quelques mois de pause.
J'ai commencé par la voie lactée depuis une falaise de Dordogne bordée de pollution lumineuse malgré l'heure avancée dans la nuit.
A7S + Samyang 14mm ouvert à F#5.6 sur star Adventurer
Une dizaine de poses de 30s
Composition de 2 images l'une pour le paysage l'autre pour le ciel.
Ensuite Les Dentelles, une première pour moi.
A7S et N130/900 sur HEQ5
5h de pose cumulées, 30s unitaires
Traitement Siril et GIMP

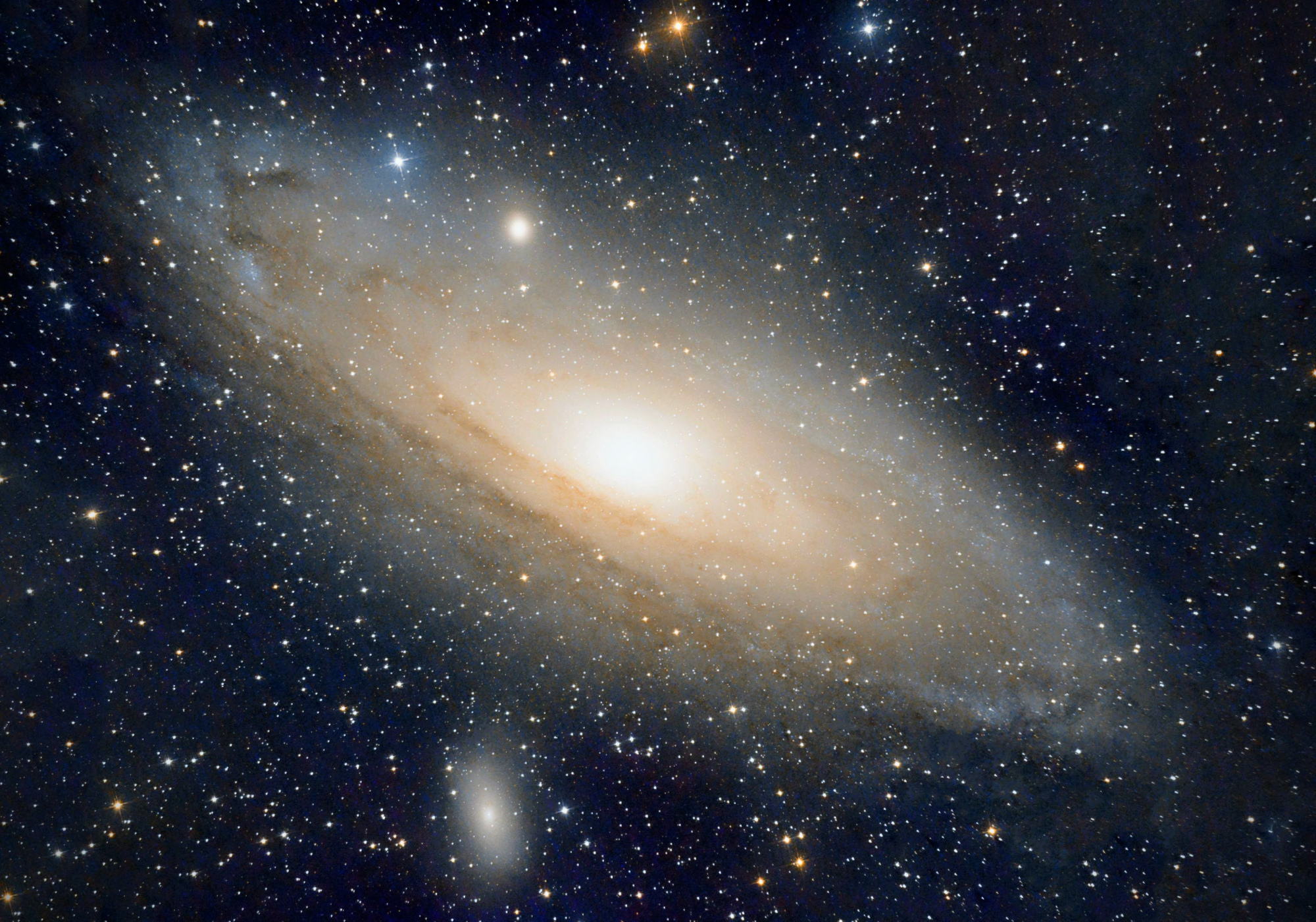
Et enfin M31
Même configuration 10h de pose sur 2 nuits.
Pas évident au niveau des couleurs, malgré l'utilisation de la correction photométrique de SIRIL.
Bonne journée à tous
Nicolas
-
7
-
-
@lyl tu as utilisé quoi pour "pousser" le traitement ?
Je pense que ca vaudrait le coup de tenter avant la compression jpg.
Merci!
Bonne fin de journée,
Nicolas
-
Bonjour
Merci à tous de vos commentaires et encouragements.
Il y a 3 heures, Patrick Lécureuil a dit :Tu as quelle monture ?
une HEQ5 modifiée avec le kit Rowan
Il y a 3 heures, Patrick Lécureuil a dit :utiliser une Barlow x2.5 ne sert à rien,
Il y a 3 heures, Patrick Lécureuil a dit :même si ton image est plus petite, elle comportera plus de détails
Je ne suis pas d'accord.
Il est évident qu'il y a moins de détails avec une focale plus petite à capteur équivalent tant que l'on reste dans les limites de la diffraction. Il est vrai cependant que la prise de vue est plus complexe et ne pardonne pas les erreurs (collimation, suivi, etc.).
Pour illustrer mon propos, voici la même cible faite l'an dernier avec le même matériel et a peu près le même temps de pose sans barlow.

En cote à cote avec une remise à l'échelle
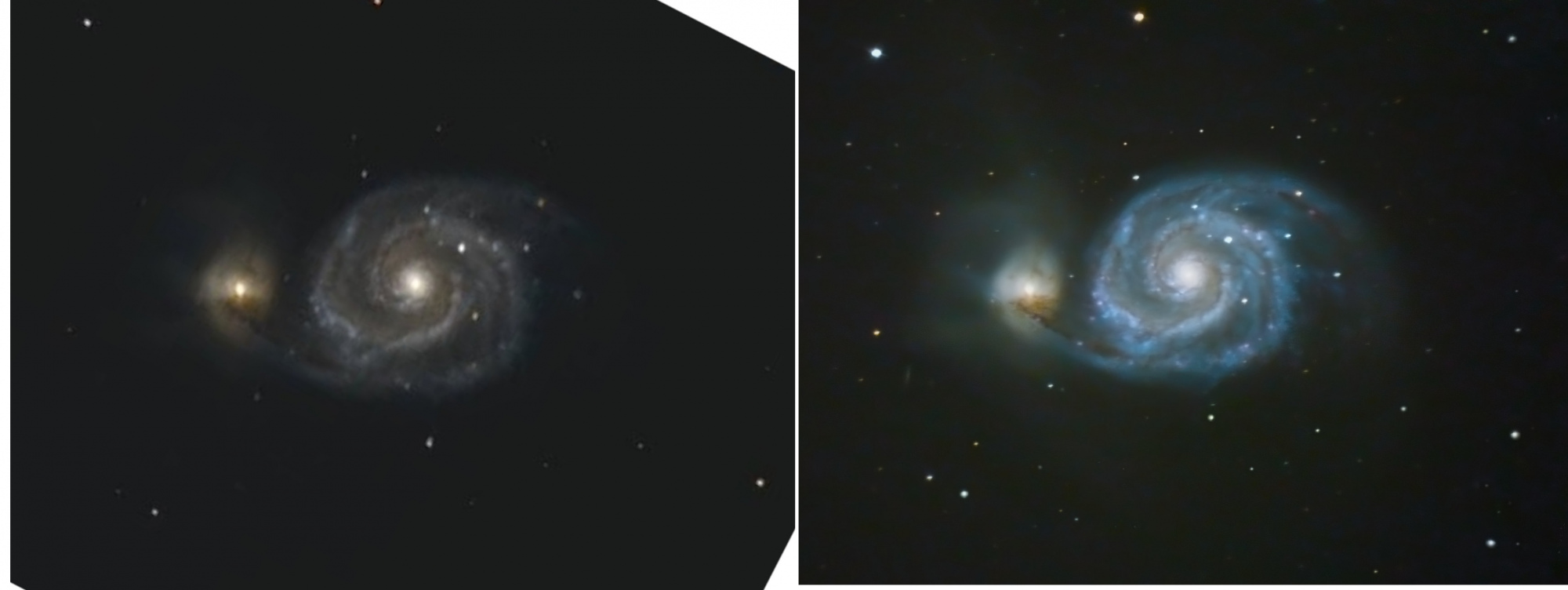
Le résultat est assez clair je pense.
Il y a 3 heures, Patrick Lécureuil a dit :ne t'apportera que du flou supplémentaire et des emmerdes en plus
C'est bien ce que je cherche les emmerdes et surtout le plaisir de les résoudre
") sinon je téléchargerais des clichés hubble directement.
Il y a 3 heures, Patrick Lécureuil a dit :
sinon je téléchargerais des clichés hubble directement.
Il y a 3 heures, Patrick Lécureuil a dit :D'ailleurs tes étoiles montrent bien un défaut de suivi,
Oui un léger défaut de suivi mais ce n'est pas le plus gros problème (qui pourrait se régler en posant plus court). Le problème vient de l'optique je soupçonne un problème d'alignement des optiques, je suis en train d'analyser.
Mais en tout cas merci pour ce commentaire.
Bonne journée
Nicolas
-
1
-
-
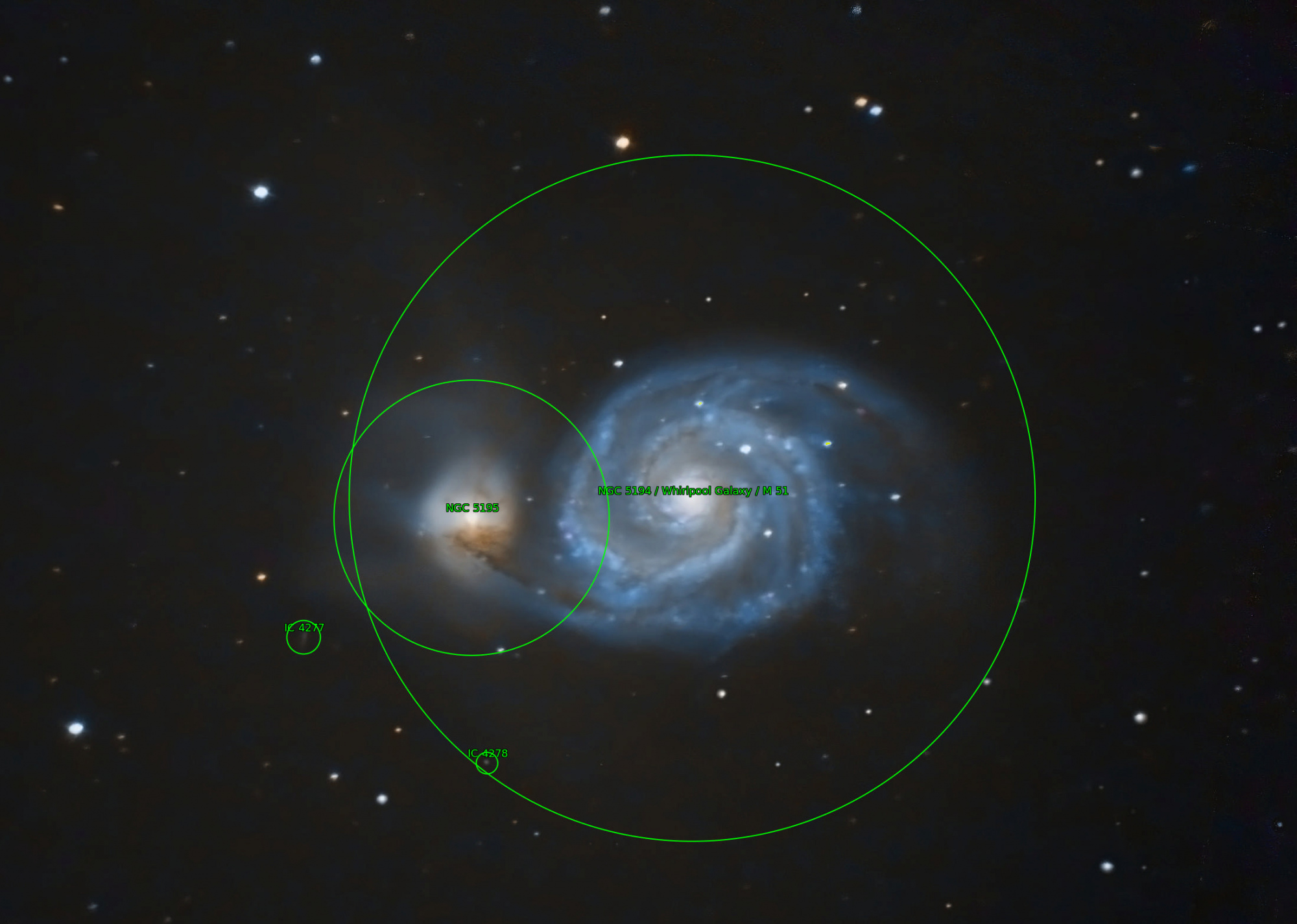
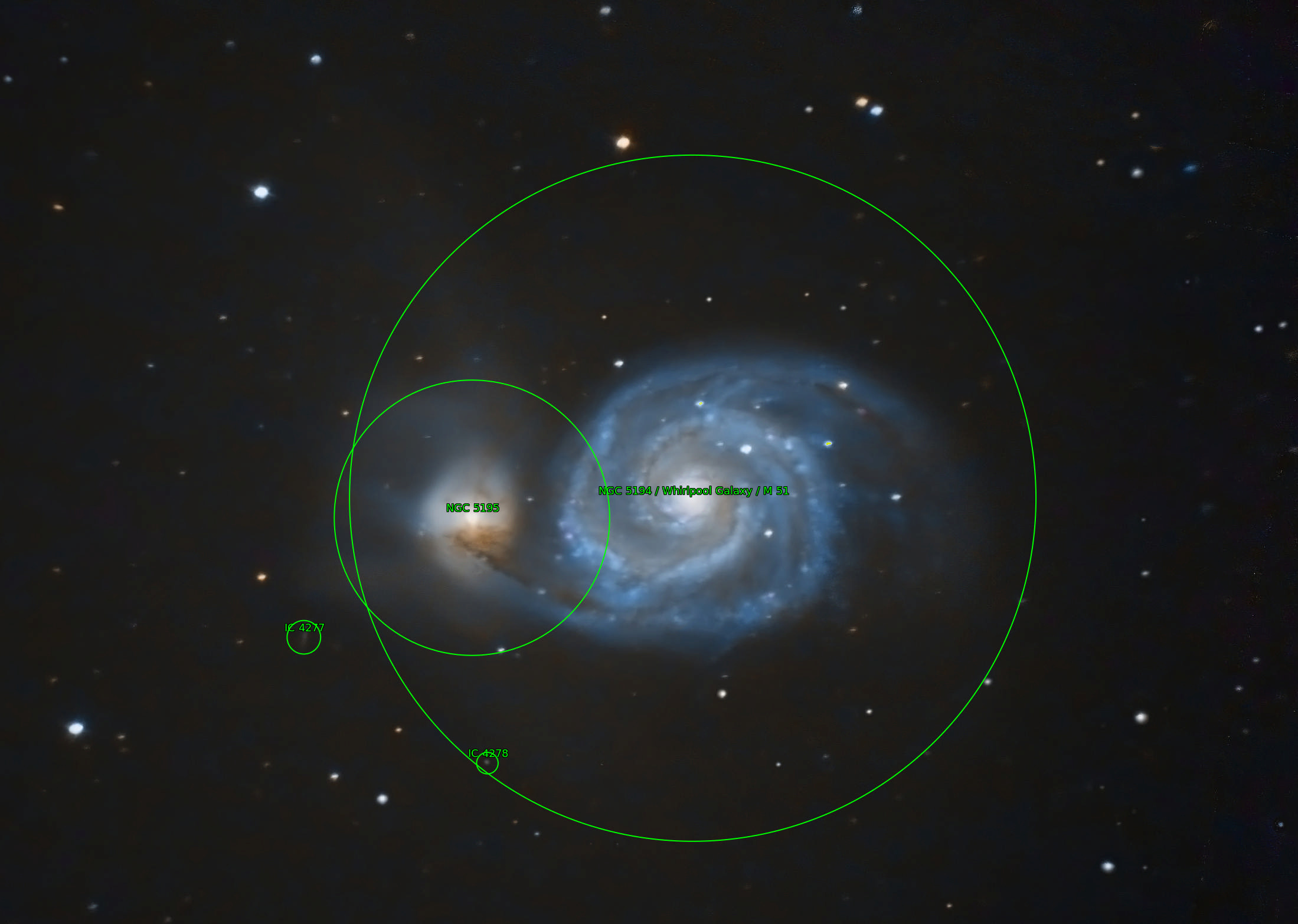
Bonsoir
Première nuit dégagée sans lune le WE dernier depuis plusieurs mois. Je tenais à partager les résultats avec vous;
J'ai décidé de tester une barlow x2.5 en 2'' compatible avec la taille du capteur de mon A7S. Le tout sur un télescope 130/900.
J'avais quelque doute, F/D 17 ca fait beaucoup même pour un A7S.
L'objectif était de tester ce que donnait une montée en focale sur des cibles CP.
Résultat assez décevant après 4h de pose la première nuit pas assez de signal, je remets ca le lendemain même durée.
Au final c'est pas si mal pour le télescope sauf les étoiles un peu empâtées malgré une mise au point soignée au masque de bathinov et un télescope collimaté
Pose unitaire de 20s,
Traitement Siril + gimp

On devine IC 4277 (un peu grâce à l'astrométrie j'avoue). Il va falloir encore monter un peu en focale (et peut être en diamètre
) pour l'avoir plein champ.
Bonne soirée à tous
Nicolas
-
4
-
2
-
-
Bonjour
Superbe, je m'y suis essayé également mais sans avoir un résultat assez potable pour être posté.
Je me garderais donc bien de te donner des conseils pour la partie prise de vue.
Pour le traitement je te suggère (par exemple avec SIRIL) :
- Une amplification non linéaire ASINH
- Une adaptation locale de contraste (CLAHE)
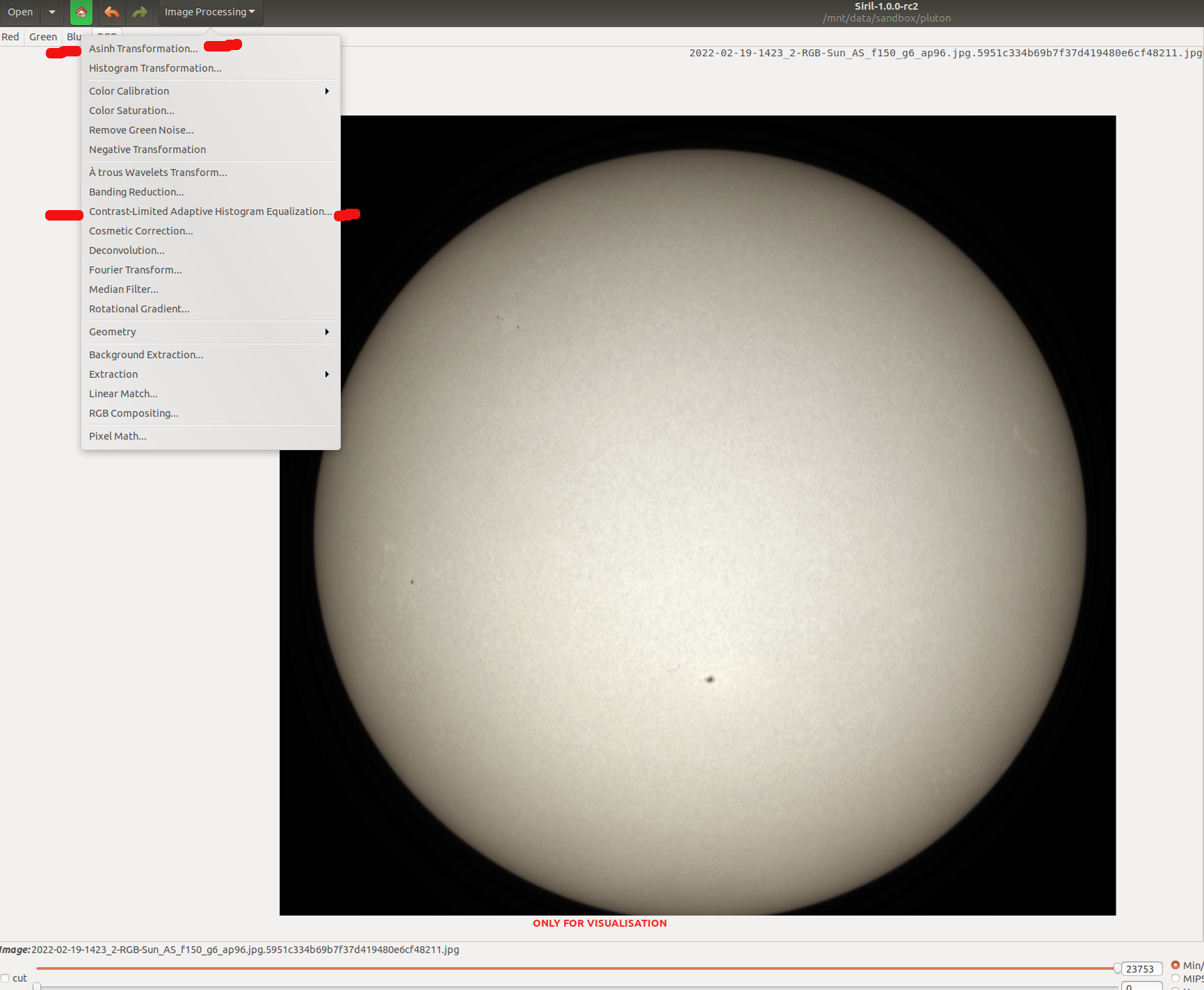
Bonne soirée,
Nicolas
-
bravo c'est vraiment très bien.
Tu devrais tenter d'accumuler plus de poses pour faire descendre le bruit.
Bon ciel
Nicolas
-
1
-
-
Bravo, superbe M42 hâte de voir le résultat final.
Le 130/900 donne vraiment de bon résultats une fois bien réglé. j'ai aussi eu des problèmes pour aller chercher le foyer avec un reflex.
Bonne soirée
Nicolas
-
Superbe bravo!
Tu descends à quelle température ?
Bonne soirée,
Nicolas














C/2022 E3 - ZTF (en retard)
dans Astrophotographie
Posté(e)
@nico 06 oui je me souviens très bien, merci de ton passage.
Concernant le 450D j'en avais défiltré un aussi et effectivement il a fallu 3 démontages / remontages pour qu'il fonctionne à nouveau (presque comme avant, j'avais encore des touches qui ne marchaient plus) --> Il faut prendre soin de bien ré-insérer les nappes.
Du coup pas de risques avec l'A7S, je l'avais confié à R. Galli
Bon courage.
Nicolas