|
|
|
Les robots au service des hommes
Du robot domestique à l'androïde (I) Définition de l'ISO Selon l'Organisation Internationale de Normalisation, l'ISO, un robot est un "mécanisme programmable actionné sur au moins deux axes avec un degré d'autonomie, se déplaçant dans son environnement, pour exécuter des tâches prévues." Mais étant donné les progrès continus dans ce domaine, cette définition est rapidement devenue insuffisante. L'ISO l'a donc complétée : "Le robot inclut le système de commande et l'interface de communication. La classification d'un robot en robot industriel ou robot de service est fonction de l'utilisation qu'il est prévu de faire du robot." De toute évidence, les membres de l'ISO sont incapables de définir clairement ce qu'est un robot et ne proposent donc qu'une définition générale qui reste floue. Peut-on définir plus précisément un robot ? On peut classer les robots dans différentes catégories. Définition plus précise En première approximation, "un robot est un objet, une machine qui accomplit des tâches de manière programmée". Seul souci, il existe une grande différence entre une machine à laver et un robot comme "Terminator" (James Cameron, 1984) ou plus proche de nous un robot ayant un aspect humanoïde comme en construit Honda ou Boston Dynamics. Où se situe donc la différence ? La machine programmée et le robot combinent tous les deux du matériel et du logiciel. La plupart des machines modernes dont les robots ménagers de dernière génération et les automates industriels sont dits "intelligents". Il existe même des voitures et des frigos "intelligents". Or ils ne font qu'appliquer un programme constitué d'une série d'instructions (cf. la cybernétique). A la définition précédente, on peut ajouter que "les robots intelligents observent l'environnement et prennent une décision adaptée". Certains sont même autonomes. Si le robot est capable de prendre en compte des paramètres environnementaux, on parle d'intelligence artificielle, IA. Mais un tel robot n'a pas "conscience" de ce qui l'entoure. Il peut être capable de tracer son chemin en toute sécurité parmi des rochers et être incapable de reconnaître la batterie située à sa droite. Si en plus le robot peut s'adapter à son environnement (aux moyens de capteurs) et apprendre par lui-même, on parle de système expert. Mais où placer les exosquelettes qui contiennent des éléments de robotique ? Quand un robot devient-il un androïde comme les géminoïdes et les robots d'exhibition qui ressemblent aux humains ?
De toute évidence, tout système de classification à ses limites et nous conduit toujours vers le même éceuil : distinguer un domaine d'un autre. Il y a un niveau à partir duquel la distinction s'estompe et en dessous duquel on ne peut plus descendre et classer un objet dans une catégorie plutôt qu'une autre. Notre définition d'un robot a donc atteint ses limites. Chacun sait qu'un robot n'a pas la même "intelligence" ni ne "pense" comme un être humain. Ce sont deux termes galvaudés par les ingénieurs et les cybernéticiens à défaut d'avoir un vocabulaire spécifique à ces machines. Un être humain est doté d'une intelligence organique et ne pense pas jusqu'au niveau subatomique de ses neurones. Un robot intelligent possède une mémoire artificielle faite de silicium et calcule jusqu'au niveau élémentaire de l'information binaire. Les robots dotés d'IA ont une capacité calculatoire bien plus performante que celle des être humains mais on ne peut pas (encore) leur attribuer une intention et des émotions; ils ne font que simuler les comportements humains. Que penser alors des robots émotionnels comme en fabrique Boston Dynamics ou Honda ? Ce sont des robots qui analysent le comportement de leur interlocuteur et s'y adaptent en imitant ses attitudes, en répondant par exemple à ses émotions par des mouvements et des paroles appropriés. Mais la différence avec un être humain est qu'aucun robot n'est jamais responsable de ses actes ou de ce qu'il dit (cf. les accidents provoqués par des conducteurs ayant obéi à la lettre à leur GPS ou ceux provoqués par des voitures autonomes). En résumé, en théorie, au sommet de l'échelle de la complexité artificielle il y a les cyborgs - les organismes cybernétiques - mais dont la conception reste un voeu pieux sinon utopique des ingénieurs. Juste en dessous viennent les androïdes et leur alter-ego, les gynoïdes (au féminin). Ce sont des robots intelligents, dotés d'IA., combinant des algorithmes d'apprentissage automatique (Machine Learning) y compris d'apprentissage profond (Deep Learning) et parfois des systèmes experts. Ils peuvent accomplir plusieurs tâches de manière autonome : se déplacer, courir, éviter des obstacles, porter des charges, jouer, danser, parler, comprendre, interpréter et poser un diagnostic. Mais globalement, cela reste des calculateurs intelligents. S'ils sont très performants et efficace dans leur domaine, en aucun cas ils n'ont la polyvalence et les facultés d'un être humain. En revanche, ils peuvent imiter ou simuler l'intelligence, le comportement et certaines émotions humaines et à ce titre ils nous rendent de nombreux services. On y reviendra. Bien entendu ces robots dotés d'intelligence artificielle sont loin des performances de leur alter-ego des romans et films de science-fiction ("I, Robot", "Blade Runner", "I.A.", etc) qui relèvent surtout de la supercherie ou de l'imagerie de synthèse.
Au niveau intermédiaire, il y a les robots utilitaires dotés de fonctions cognitives capables d'accomplir des tâches simples ou répétitives, parmi lesquels les robots industriels. Un peu plus bas on trouve les robots ou assistants domestiques plus ou moins sophistiqués et dotés parfois d'un brin d'intelligence et connectés ou non au monde extérieur. Enfin, tout en bas de l'échelle, on trouve les automates, des machines programmées pour accomplir un mouvement ou une tâche spécifique. Certains ordinateurs et robots dotés d'IA sont capables d'assurer des fonctions de contrôle, de gestion et même de prendre des décisions (de faire des choix dans un ensemble de données) sans intervention humaine. C'est par exemple le cas des systèmes experts utilisés dans le domaine de la sécurité nationale, de la finance, de la médecine hospitalière ou dans les navires et avions de combats de dernière génération comme le F-35. Dans ce dernier exemple, l'intelligence artificielle intègre et analyse les données brutes et propose un résumé de la situation au pilote sans qu'il ait à analyser lui-même chacun des éléments identifiés dans son champ d'action. Après nous avoir leurré avec des androïdes factices comme R2D2 et C-3PO de "Star Wars", Data de "Star Trek", le "Terminator" ou encore David de "AI", nos ingénieurs commencent à créer des machines qui ressemblent véritablement à des androïdes fonctionnels, au point de duper les enfants qui se demandent si finalement ils ne sont pas vivants... Parfois on peut effectivement se poser la question tellement ces créatures sont réalistes ! Mais l'air ne fait pas la chanson. Les premiers robots interactifs remontent à 1970, lorsque Tezuka Osamu présenta à l'Exposition Universelle de Tokyo les premiers robots capables de parler et de saluer le public. On nous présenta ensuite un robot musicien à l'Exposition de Tsukuba en 1989. Il faudra attendre la fin des années 1980 pour que les chercheurs développent les premiers capteurs sensoriels pour la proprioception indispensables au déplacement et à la perception des objets. Quand en l'an 2000 le sympatique petit robot Asimo de Honda parvint à courir (ses deux pieds n'étaient plus en contact avec le sol), la performance enthousiasma à juste titre la communauté des roboticiens et tout le public venu assisté à sa démonstration ! Mais depuis, le gentil Asimo passe pour un amateur face au taciturne Atlas de Boston Dynamics quand on voit qu'en 2017 il était capable d'effectuer un salto arrière ! Ceci dit, ne nous leurrons pas. Cela reste des machines, certes parfois intelligentes, robustes et très performantes, mais perfectibles qui peuvent "dérailler", tomber en panne, glisser et être subitement aussi inertes que leurs pièces détachées (cf. cette compilation de 2015 et cette compilation de 2018). Ces "défauts de jeunesse" relativisent l'image de perfection que le département marketing des constructeurs aimeraient leur donner. Sur base de ce que nous venons de décrire, nous allons passer en revue l'éventail des robots en les regroupant en catégories : - les robots de recherche - les robots militaires - les robots d'exhibition - les robots simulateurs (en médecine) - les robots domestiques - les exosquelettes. Les robots de recherche Les robots destinés à la recherche scientifique permettent aux cybernéticiens et aux psychologues notamment de mieux comprendre l'élaboration de la pensée et la manière dont nous interagissons avec l'environnement, et aux chercheurs en neurosciences, en médecine bionique et en biologie notamment, de simuler certaines attitudes afin de mieux comprendre le fonctionnement des membres et les réactions du corps. COG, de Rodney Brooks Le robot COG de Rodney Brooks du MIT a été construit en 1991. Ce robot était capable de voir, d’entendre et de réfléchir, et notamment de se regarder dans un miroir en s'identifiant à son image. COG réagissait en fonction de son environnement, il apprenait à reconnaître les visages et pouvait suivre des objets en mouvement ou répondre aux stimuli sonores et visuels comme le ferait un enfant. C'était le robot le plus évolué de sa génération. Fort de son expérience, Brooks fonda la société iRobot et son expertise technique sera mise à profit pour construire le rover télécommandée Sojourner qui explora la surface de Mars en 1997 et quantité de robots chenillés utilisés par la sécurité civile et par l'armée. Le projet COG fut clôturé en 2003. Le robot est exposé au musée du MIT consacré à l'Intelligence Artificielle. A voir : Les vidéos du projet COG du MIT
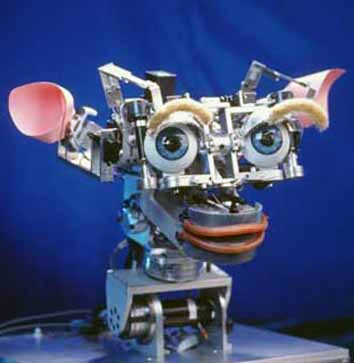
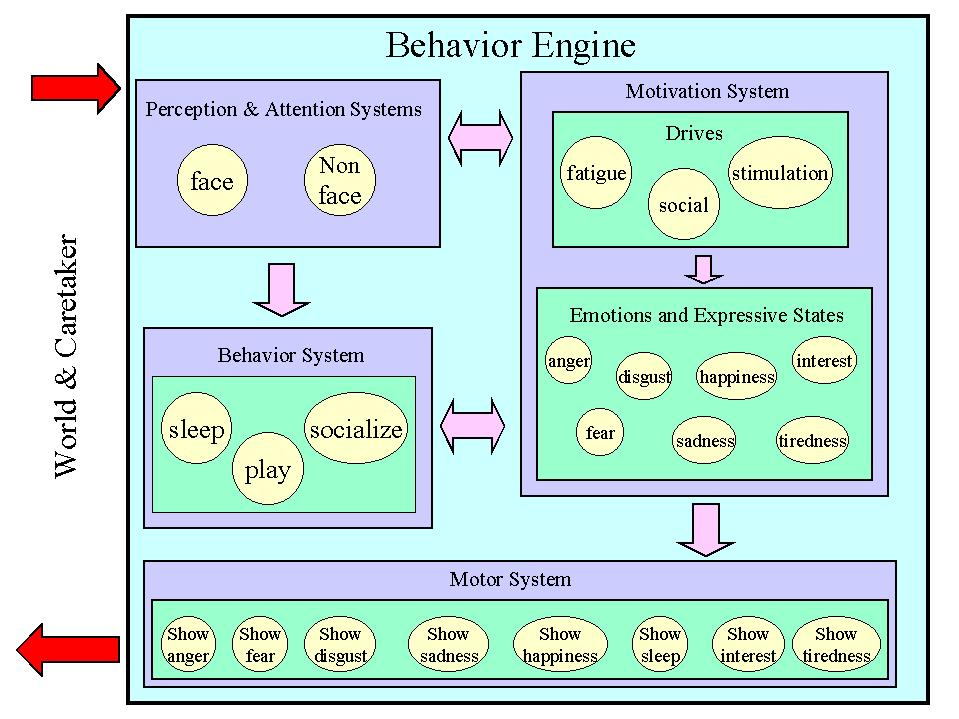
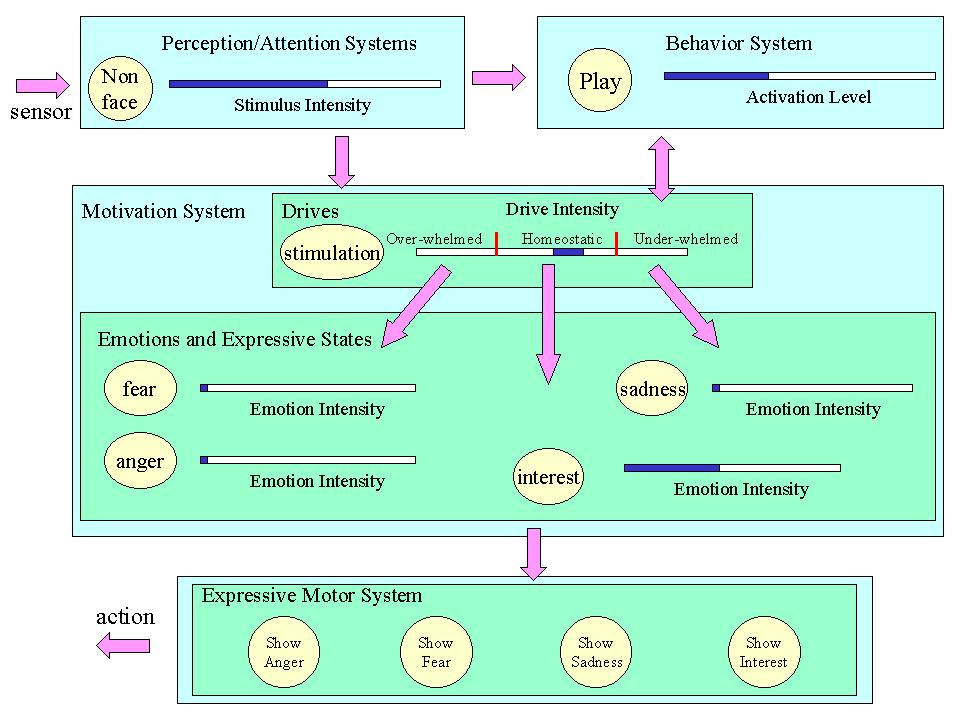
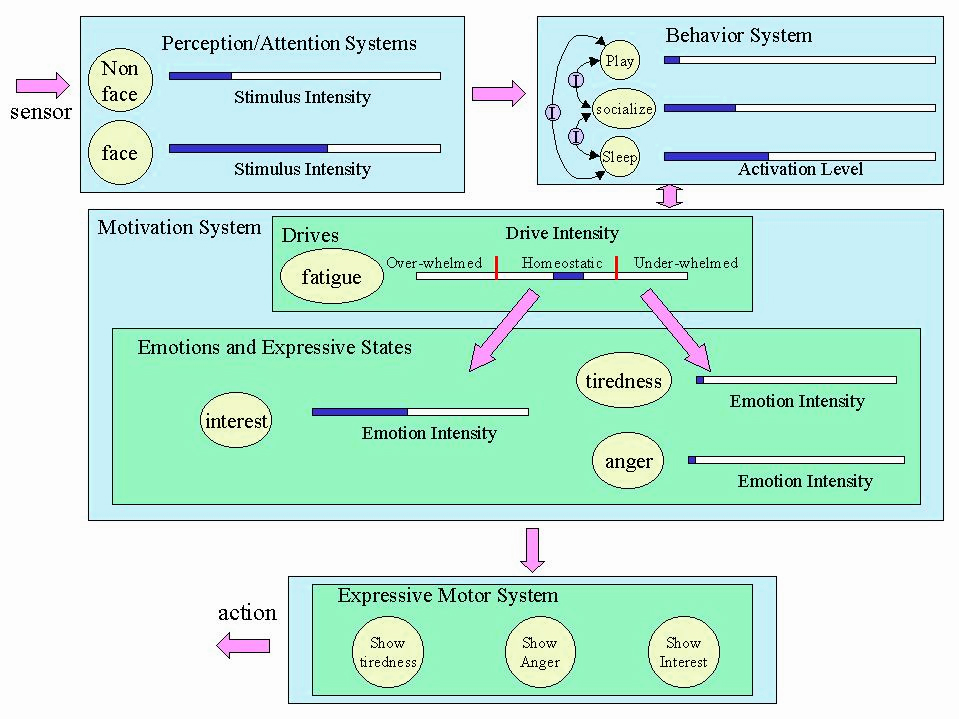
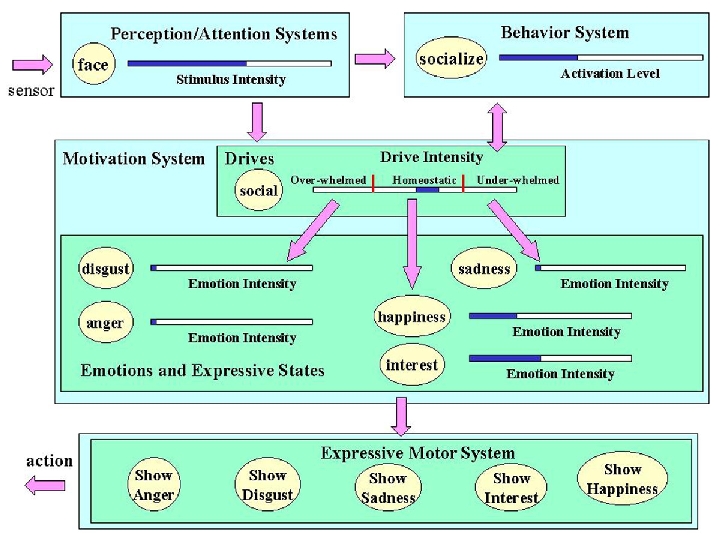
Kismet, de Cynthia Breazeal Un autre projet spectaculaire qui fit progresser la recherche en IA fut le robot Kismet également élaboré au MIT. Le projet fut initié par la Dr. Cynthia Breazeal avec l'aide de quatre collègues dans le cadre de son doctorat de recherche consacré à l'échange des expressions sociales entre les humains et les robots humanoïdes. Le projet fut financier par le DARPA et le groupe japonais NTT. La structure robotique sera réalisée en mars 1997 et il aura sa forme définitive en mars 1998. Kismet est un système capable de voir, entendre et ressentir son environnement grâce à des capteurs proprioceptifs. Il peut exprimer des émotions mais également réagir à celles de son interlocuteur grâce à des fonctions motrices et perceptuelles. Kismet peut aussi prononcer des sons. Ils sont généralement inintelligibles mais à l'occasion ils peuvent avoir un sens, comme le mot "Hi" (bonjour) . Kismet présente également des expressions faciales et des moteurs lui permettent d'orienter son regard, sa tête, ses oreilles et de bouger la forme de ses lèvres. Son système d'intelligence artificielle s'articule autour de systèmes d'attention et de perception centrés sur les expressions du visage et l'intensité des stimuli. Ces informations sont communiquées à un système comportemental mesurant le niveau d'activation. En combinant ces concepts dans un "système de motivation", Kismet est capable de ressentir et d'exprimer des états émotionnels et des expressions : la joie, l'intérêt, la tristesse, la colère, la surprise, le dégoût, le calme, la fatigue et la peur.
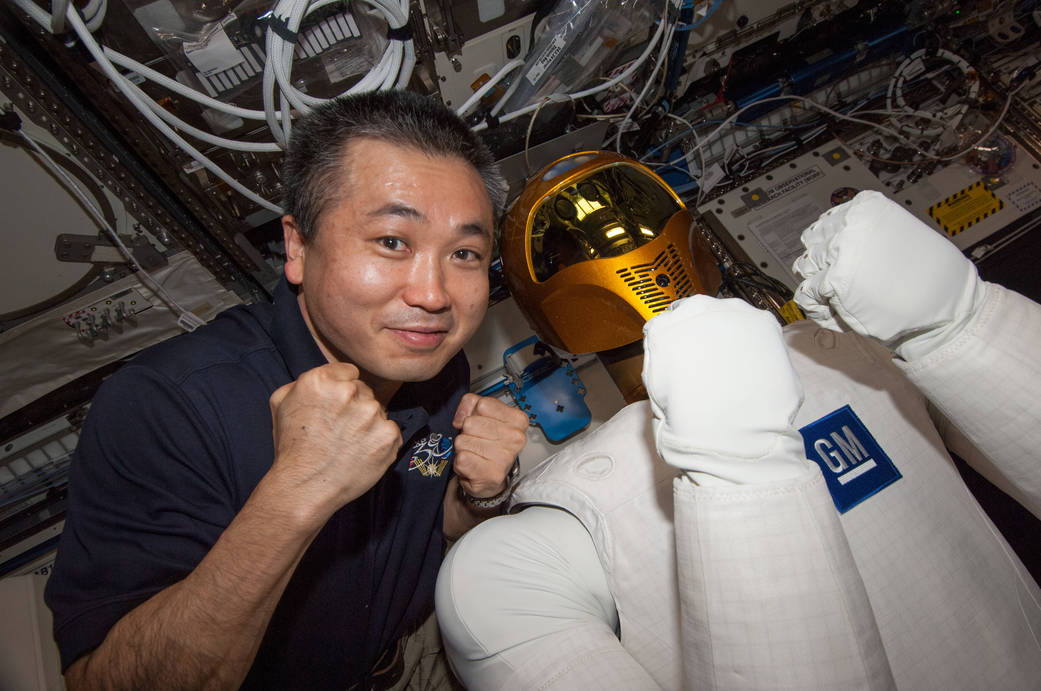
Ces systèmes bien que programmés, laissent la liberté à Kismet d'apprendre et donc de s'améliorer au contact des humains. En bref, Kismet est l'un des robots les plus sophistiqués jamais conçu malgré qu'il soit limité à une tête humanoïde. Il est aujourd'hui exposé dans le musée d'Intelligence Artificielle au MIT où les visiteurs peuvent interagir avec lui. Assurément, il vaut le détour. Les robonautes En 2001, le DARPA (qui finança le développement d'ARPANET, du GPS et de quantité d'autres innovations de haute technologie) en collaboration avec le centre JSC de la NASA, Vanderbilt, le MIT et l'USC mis au point le "robonaute" dont voici la première version. Ce robot fut amélioré en 2003 dans la version R2 et épaula les astronautes au cours de plusieurs missions à bord d'ISS (STS-133 en 2011, Expedition 36 en 2013, Expedition 39 en 2014, etc). Nous en sommes encore aux balbutiements car ces robots tombèrent encore en panne (cf. cet article) mais ils ont démontré qu'ils étaient capables d'accomplir certaines tâches élémentaires.
Comme on le voit à gauche, en 2015 la NASA en était à sa 5e génération avec le robot R5 affectueusement surnommé "Valkyrie". A terme, il devrait tenir bon durant les 8 heures que dure une EVA, résister à des différences thermiques comprises entre -25°C et +105°C et bien sûr fonctionner dans le vide sous 0g sans montrer la moindre fatigue ou dans n'importe quel autre environnement hostile et notamment sur les lieux des catastrophes, venant en appui aux sauveteurs. Entre-temps, le petit robot japonais Kirobo monta brièvement à bord d'ISS en 2013. Depuis août 2019, un autre robot humanoïde a pris la rélève à bord d'ISS : Fiodor (ou Fédor) alias Skybot F-850 développé par l'agence Roscosmos. Mais aucun de ces robots n'est autonome et leur intelligence est très limitée. En fait, à peu de choses près, ils sont moins intelligents que le bras robotique Canadarm 2 installé à l'extérieur d'ISS qui assiste les astronautes durant les EVA et peut refuser un ordre ou demander aux astronautes s'il y a un risque à effectuer la manoeuvre. Notons au passage que malgré tout le savoir faire des ingénieurs, il n'existe toujours aucune technologie capable de faire fonctionner plus de quelques dizaines de minutes un appareil par des températures glaciales inférieures à -50°C (d'ailleurs, la plupart des instruments de mesures ne descendent pas en dessous de -20°C). Même dans l'espace, les satellites tournent sur eux-mêmes et ne restent pas plus de 30 minutes exposés à des températures inférieures à -100°C. Si un jour nous voulons envoyer des robots explorer par exemple le fond de certains cratères lunaires situés au pôle Sud qui ne sont jamais exposés au Soleil et où règne en permanence une température voisine de -150°C ou certaines dépressions Antarctique où la température oscille entre -80 °C et -92.3°C (record absolu), les ingénieurs devront imaginer des résistances chauffantes d'une nouvelle génération, capables de supporter ces températures extrêmes durant plusieurs heures. Sinon la seule alternative sera d'utiliser des moyens satellites pour les ausculter à distance. A ce jour, le froid extrême reste une barrière infranchissable autant pour l'homme que pour les robots. Les robots scientifiques peuvent également aider les chercheurs à comprendre certains propriétés comme l'auto-organisation ou l'auto-assemblage. C'est ainsi que les micro-robots M-Blocks du MIT devraient à terme être capables de s'auto-assembler et de fabriquer eux-mêmes les objets dont ils ont besoin (voir le lien ci-dessous). La perspective de construire des usines et des édifices auto-assemblés se profile à l'horizon, mais qu'on se rassure, il est encore très lointain (au-delà du XXIIe siècle). Tant qu'un scénario à la Isaac Asimov ne se réalise pas, nous avons une chance d'échapper au monde des robots ! A
voir : Valkyrie: NASA's Superhero Robot R2 Operating a taskboard on the ISS, 2012 A lire : Le robonaute R2 embarque pour la station ISS (sur le blog, 2011) M-Block, le micro-robot qui s'auto-assemble (2013) Les robots militaires Depuis que les armées existent, les centres de commandements ont toujours veillé à ce que leurs troupes en mission bénéficient d'un soutien en première ligne aussi performant que celui fourni à l'Etat-Major. Cela signifie que les soldats et leurs officiers doivent disposer sur le théâtre des opérations de toutes les informations nécessaires pour mener à bien leur mission mais également tout le matériel, y compris de support et de maintenance. De nos jours, tout le support aux armées est apporté sur le terrain par des moyens de transport automobiles et aériens allant du Hummer au bombardier B-2 furtif en passant par le gigantesque Boeing C-17 GlobeMaster et la légère estafette de campagne. Les informations analysées par des ordinateurs parfois équipés de systèmes de reconnaissances vocaux sont transmises aux soldats par vidéos ou signaux radiofréquences cryptés au moyen de supports très variés. Parmi les plus utilisés citons les antennes paraboliques et les radios portatives en onde-courtes V/U/SHF, les liaisons Wi-Fi, les cartes militaires OLED, les drones ou UAV (RQ-4A Global Hawk, Taranis) et autres robots-insectes, les ballons (par ex. LEMPV ou Blimp) sans oublier les satellites espions hérités de Keyhole, les satellites de télécommunications ainsi que les GPS intégrés au réseau Echelon. Aujourd'hui, à travers ces technologies de pointe, nous sommes les témoins d'une véritable révolution, celle de l'industrialisation de la guerre. A
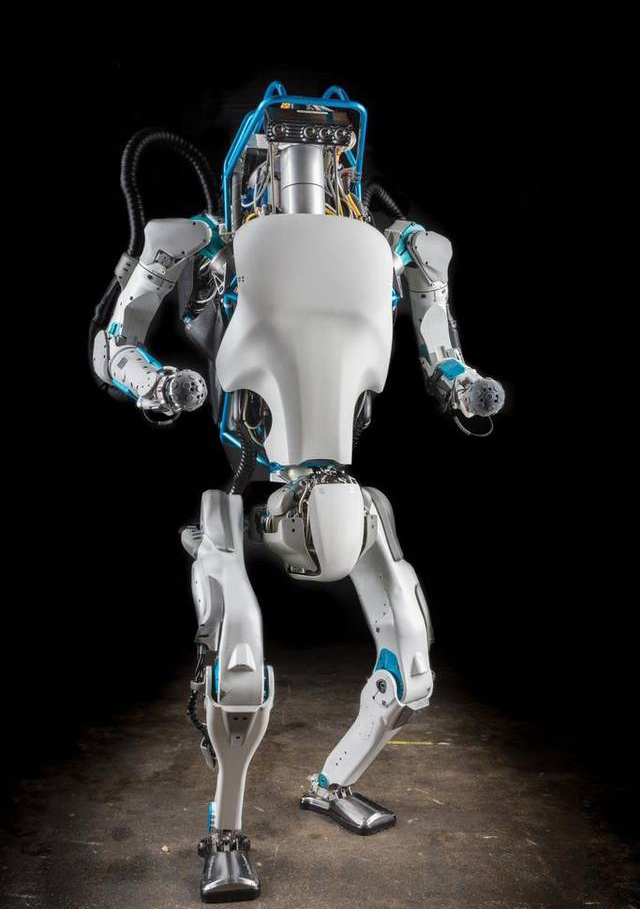
voir : Atlas Gets a Grip,
Boston Dynamics, 2023 Getting some air, Atlas?, Boston Dynamics, 2018 What's new, Atlas ?, 2017
L'armée utilisant généralement du matériel lourd qu'elle doit transporter à travers tous les terrains, les gouvernements et tout spécialement l'armée américaine et ses alliés ainsi que la Russie investissent de plus en plus dans des robots capables d'assurer différents types de missions : la surveillance, la reconnaissance, le support et même capables de combattre. Par "robot" militaire, il faut entendre tout système assurant une fonction de manière automatique, autonome ou contrôlé à distance, qui aide le soldat à accomplir sa mission. Il peut s'agir d'un dispositif aidant le soldat à transporter son matériel, le protégeant, surveillant la zone de repli, l'objectif, etc, bref, l'aidant intelligemment dans tous les environnements et situations, que ce soit sur terre, dans l'air ou même dans l'eau. Parmi les robots existants ou dont les projets sont en voie d'aboutir citons parmi les plus connus : les robots chenillés de surveillance et de reconnaissance (par ex. iRobot, OFRO), le transporteur modulaire polyvalent (CaMEL, Cheetah, BigDog) et le robot d'acquisition de cible et armé (MAARS). Notons que certains robots fabriqués par Boston Dynamics (inventeur de Cheetah , BigDog, WildCat, Atlas, etc), propriété de Google depuis fin 2013, sont capables de monter sur des parois verticales, des murs ou des vitres, tandis que les plus petits se comportent comme des fourmis, des crabes ou des balles magiques. Mais il ne faut pas oublier que Boston Dynamics travaille sur les robots depuis 1992 et son directeur Robert Playter travailla auparavant au MIT où il fonda le Leg Laboratory en 1980 dédié à la robotique. Boston Dynamics a donc une longue expérience et bénéficie du support financier du DARPA. Aujourd'hui, le robot autonome le plus sophistiqué et polyvalent sur le plan manuel est Atlas, un robot de 1.5 m pesant 75 kg et fonctionnant sur batterie. Ses mouvements sont assurés par des systèmes hydrauliques (il dispose de 28 degrés de libertés ou jointures) et sa vision est assurée par un système Lidar stéréo. Début 2018, il était capable d'ouvrir des portes, de porter des charges lourdes, de faire un salto arrière et même de faire du jogging sur un terrain irrégulier (cf. les vidéos ci-dessus) ! Atlas ferait déjà un excellent partenaire de sport ou gestionnaire de stock ! Mais les ingénieurs veulent encore aller plus loin, notamment dans les applications militaires. A
voir : PETMAN
Test Camo - BigDog
Reflex, Boston Dynamics
Avec le support financier du gouvernement, Boston Dynamics travaille actuellement sur un véritable robot humanoïde (PETMAN) qui, à en croire le DARPA, remplacera un jour le soldat armé d'un fusil par un robot humanoïde équipé d'un PHaSR (Personnel Halting and Stimulation Reponse), une arme laser non létale (voir ce rapport), laissant les balles réelles aux humains. Ceci dit, vu les questions juridiques qui entourent déjà l'utilisation de drones armés lors de conflits internationaux, il faudra bien un jour amender le droit militaire et la législation internationale pour tenir compte du rôle et des responsabilités des robots, y compris les drones et les véhicules autonomes, qu'ils soient sur le terrain ou qu'il s'agisse de militaires ou civils assis derrière leur bureau à manipuler un joystick. En alliant la technologie développée par Boston Dynamics aux performances des robonautes ou d'Asimo, les Etats-Unis envisagent très sérieusement de fabriquer des robots de combat aussi sophistiqués que ceux de "Star Wars". A
voir : Army Robots of the Future,
The History Channel The Future of Military Dogfights War, The History Channel
Aujourd'hui, les soldats des grandes puissances ont déjà à leur disposition des moyens de haute technologie. A côté des moyens de communications sophistiqués et des écrans souples interactifs, ils disposent de viseur à tête haute, de lunette de vision nocturne, de systèmes de guidage laser et de toute la panoplie des accessoires du génie militaire, et pourquoi pas d'une cape d'invisibilité. A Fort Benning, en Georgie, l'armée américaine propose à ses soldats un casque à réalité virtuelle et augmentée équipé d'un écran de 1 cm relié au réseau militaire. Grâce à cette technologie, aujourd'hui, les soldats qui sont sur le terrain sont reliés à Internet. D'ici 2030, les soldats porteront des uniformes furtifs qui résisteront au tir d'un fusil d'assaut grâce aux propriétés du graphène et leur tenue sera 10 kg plus légère. Nous verrons que l'armée leur propose aussi des exosquelettes pour les aider à transporter tout leur équipement ou des charges très lourdes sans effort. De sources scientifiques, il se pourrait que vers 2025 les soldats de l'US Army soient équipés d'un casque au moyen duquel ils pourront communiquer par télépathie synthétique. Mais à part l'effet d'annonce, on peut douter qu'ils seront opérationnels si rapidement. Selon le DARPA, vers 2030, les bombardiers et chasseurs de nouvelle génération de l'USAF seront équipés d'intelligence artificielle comme en comporte déjà le F-35 de Lockheed Martin. Vers 2035, les troupes seront épaulées par des robots, et en 2040 tous les vaisseaux de guerre seront équipés d'intelligence artificielle et pourront être pilotés à distance (cf. les technologies du futur). Dans d'autres armées, évoquer les robots, la réalité virtuelle, les exosquelettes et les tenues de combats légères et blindées, cela n'existe pas dans le catalogue de leurs fournisseurs et c'est encore de la science-fiction ! Si aujourd'hui nous avons beaucoup de peine à fabriquer des robots autonomes humanoïdes fiables capables de nous épauler, dans quelques générations les robots nous ressembleront et auront la faculté d'anticiper nos pensées et nos actions à la même vitesse que nous réagissons. C'est du moins le but que poursuivent les chercheurs ainsi que nous allons le découvrir dans le prochain chapitre. Prochain chapitre
| |||||||||||||||||||||||||||||||||||||||||||||||||














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}