dans ce post je ne parlerais pas du sol'Ex en tant que tel mais plus des précautions à prendre lors de son utilisation que je commence seulement à maitriser après de nombreux déboires
le site dédié a cet appareil décrit tout le fonctionnement de ce sol'Ex : http://www.astrosurf.com/solex/
Premier constat :
rien ne différencie un Sol'Ex V1 d'un Sol'Ex V2 à part le bloc d'entrée et de sortie.
on m'a souvent posé la question quand j'ai revendu le V1.

la finition est aussi meilleure comme on peut le voir
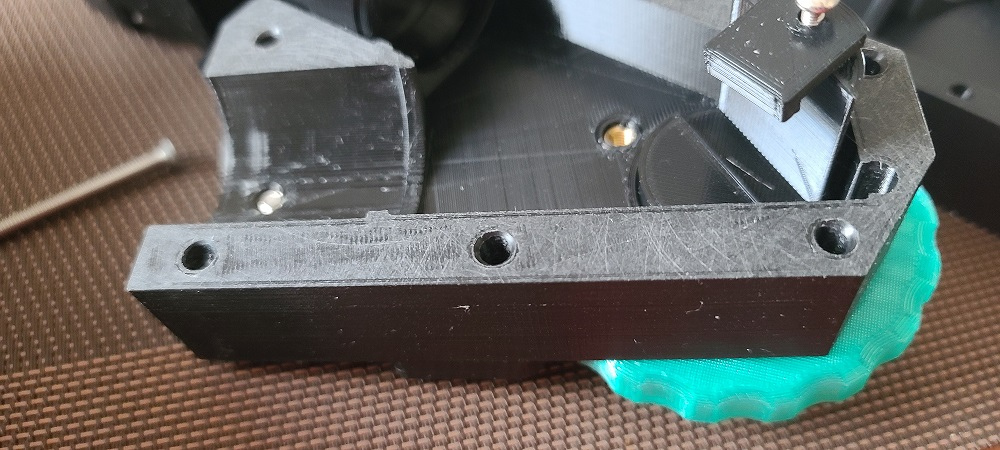
la principale différence majeur réside dans la rainure du bloc. cela évite à la lumière de passer entre cet interstice
le V1 :
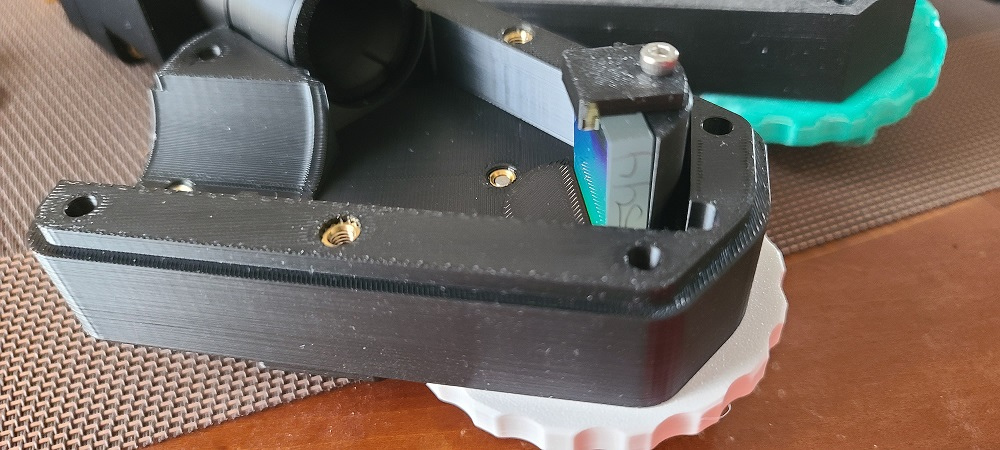
le V2 :
la solution dpour le V1 réside par la mise en place d'un scotch noir d'électricien entre les deux blocs du boitier Sol'Ex.
c'est efficace et peu cher
Deuxième constat :
outre le fait qu'on doit passer par des étapes de réglages optiques , on comprend vite que le poids de l'ensemble du sol'Ex est son pire ennemi .
c'est amplifié quand on est forcé de mettre une Barlow ; des bagues allonges et un prisme d'herchel.
le point de focalisation s'en trouve très éloigné et l'ensemble à tendance à provoquer des torsions et flexions .
la première choses que j'ai appris en l'installant : évitez les serrages annulaires et préférez le vissage !
ils sont peu efficaces et le serrage est loin d'être idéal.

préférez les Portes oculaires , les barlow et les bagues allonges vissables .
ils sont plus chers mais tellement plus fiables !
pour la Barlow Televue cette marque propose un T ring qui permet de visser n'importe quoi dessus

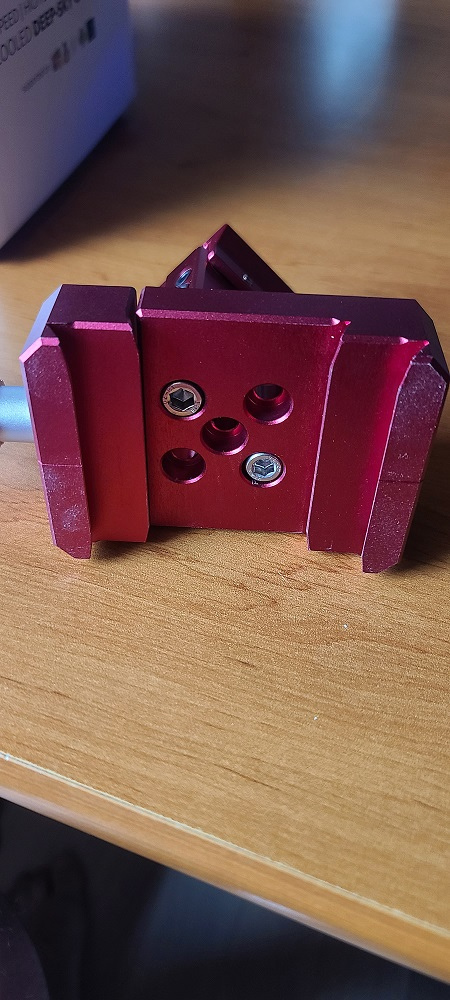
pour le porte oculaire, certaines marques haut de gammes comme moonlite permettent d'installer une bague vissée en sortie soit en 2 pouces soit en 31,75mm

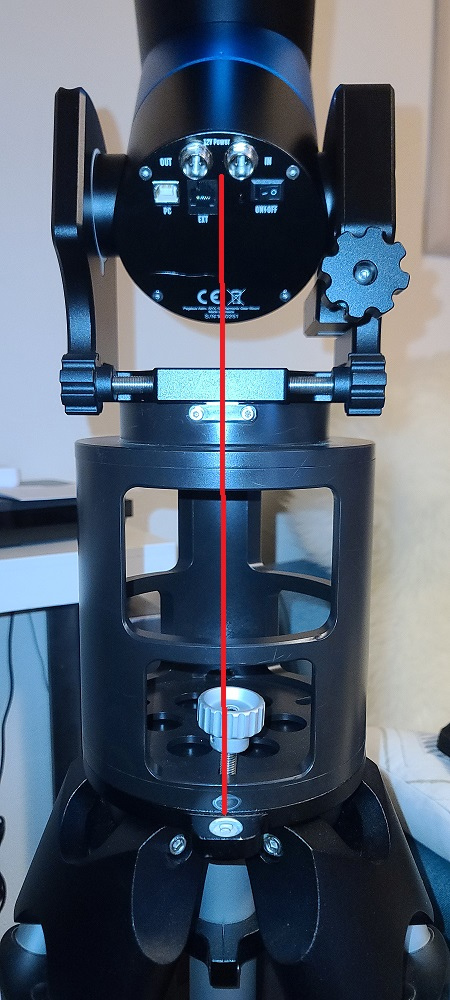
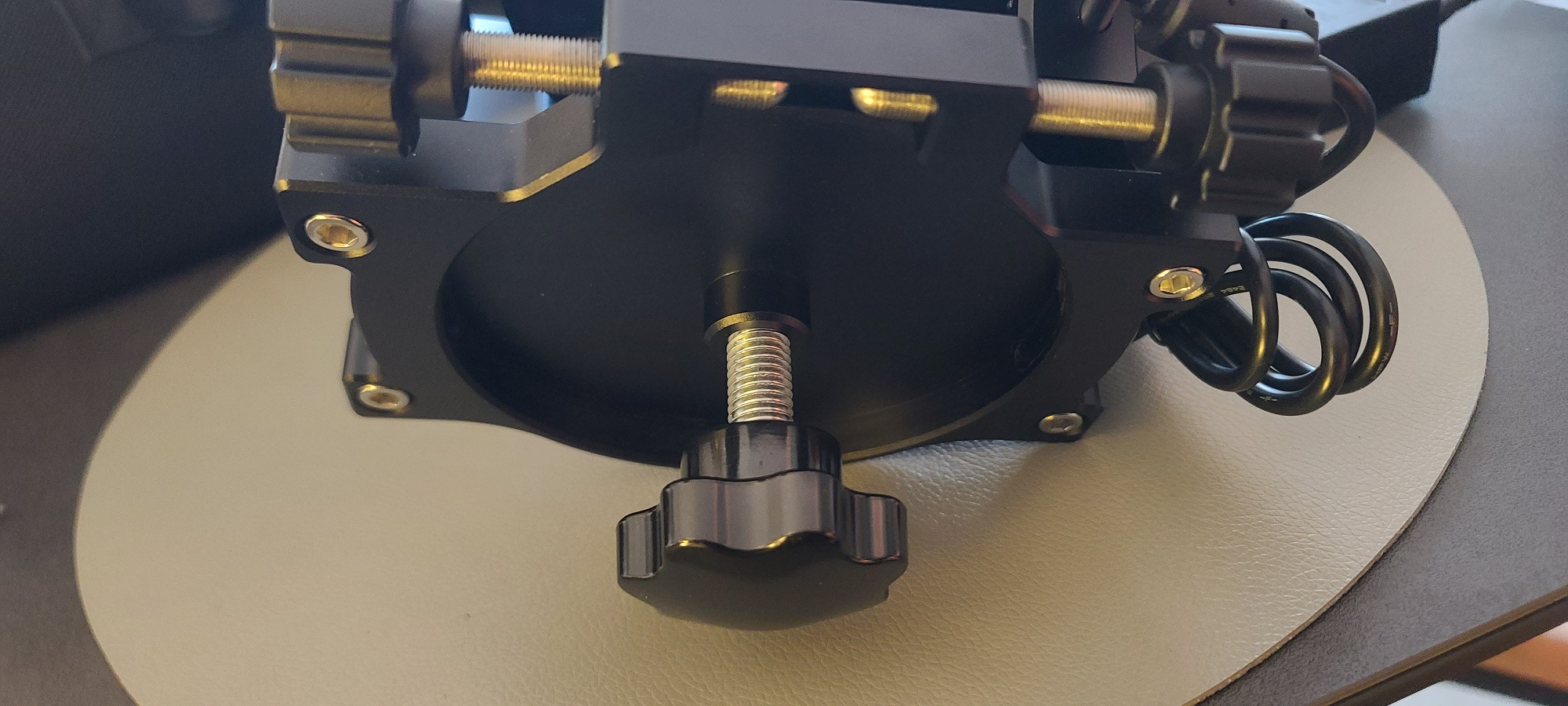
NT : la bague que vous voyez en sortie permet de bloquer l'ensemble en le laissant dans une position horizontale. j'ai découverts sa fonction dernièrement ![]()
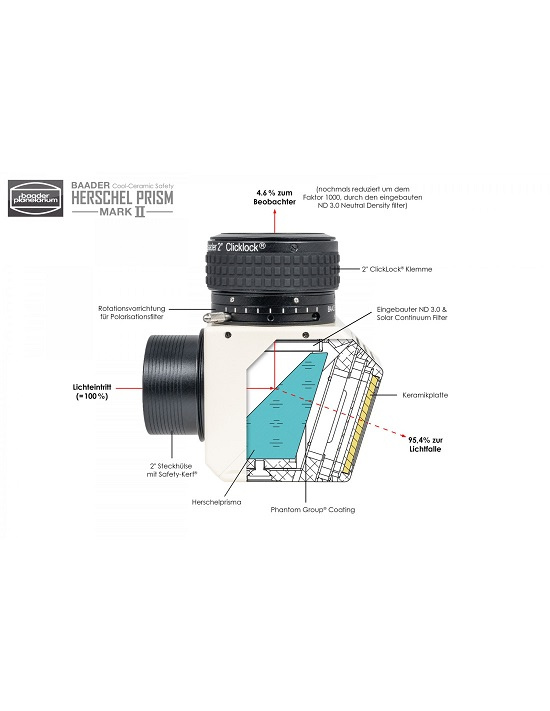
enfin pour le prisme d'herchel il existe des sorties vissables en 2 pouces ou 31,75mm
j'ai abordé rapidement le sujet dans le post suivant : le Prisme d'herchel de baader en 2 pouces
une bague d’arrêt comme dans le cas du PO aurait été un plus.
ils permettent ainsi de rigidifier l'ensemble et vous évitera de voir votre Sol'ex chuter d'un mètre .![]()
pour mon cas la casse c'est résumé au tube objectif #12 mais cela aurait pu être plus grave si je n'avais pas amorti sa chute avec ma jambe .

c'est aussi la partie la plus fragile du sol'EX et je vais justement l'aborder dans ce troisième constat
Troisième constat :
cette partie à été modifiée dernièrement dans la version V2 du Sol'Ex mais vous allez vite voir que cela ne suffit pas .
j'aurais préféré un système raidisseur #14 comparable au bloc collimateur #3
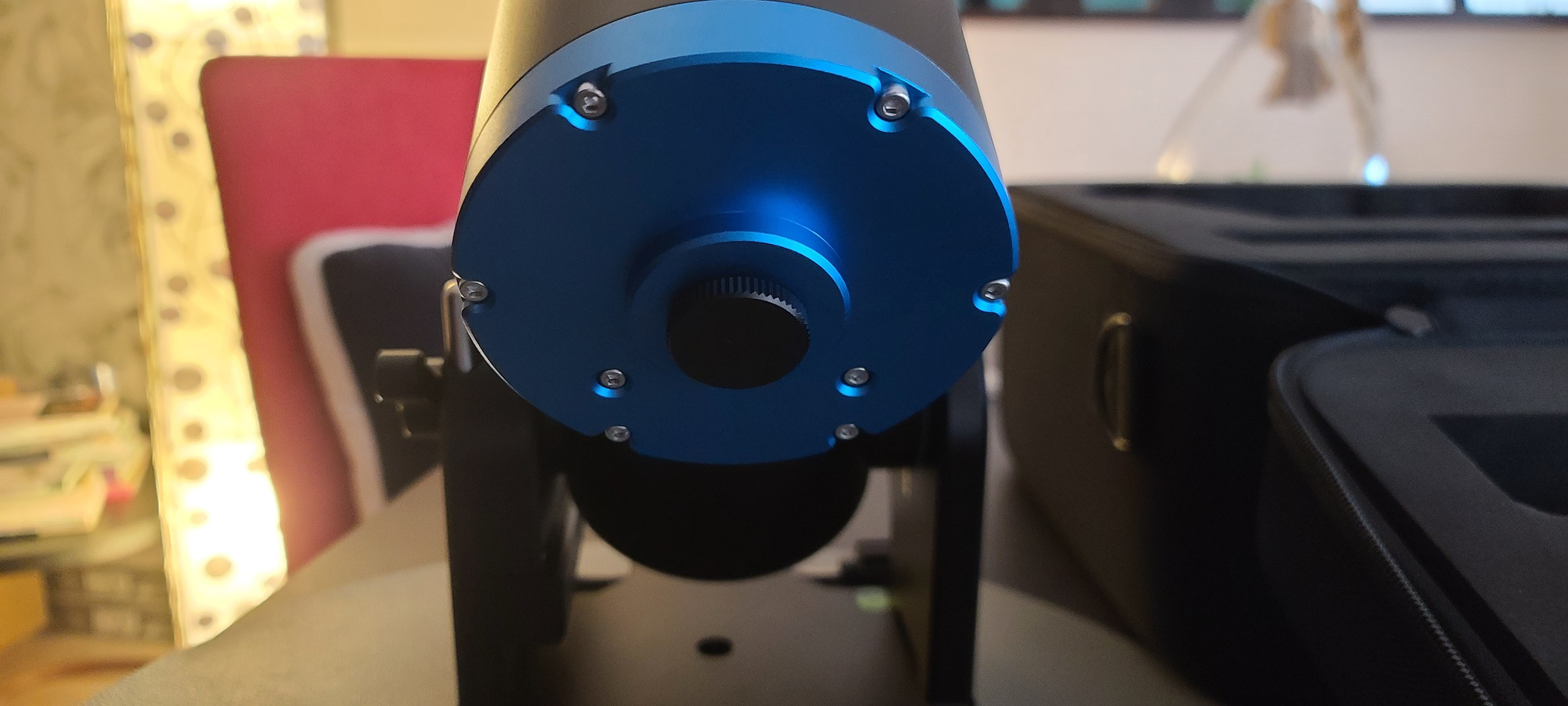
A la place du tube objectif #12, la société Azur 3D l'a remplacé par une bague T2 objectifs spécifique avec une bague d'extension métallique de 30mm
cela rigidifie l'ensemble mais il reste toujours un soucis en cas de choc sur celui ci.
c'est ce qui m'est arrivé par inadvertance en tapant malencontreusement la caméra (posée sur celui ci) sur un mur. le pas de vis s'est endommagé ! .

j'ai du racheter une bague T2 sur leur site https://azur3dprintshop.com/61-1154-kit-configuration-80x80mm.html#/171-tube_allonge_aluminium-oui
pour ceux qui ont une caméra refroidie je vous conseille fortement de mettre le raidisseur qui solidarise la caméra avec l'entrée de l'hélioscope https://azur3dprintshop.com/63-raidisseur-configuration-80x80mm.html
pour obtenir le bon diamètre j'ai interposé une bague allonge T2 femelle femelle de 11mm de Zwo dont le diamètre correspond a ce raidisseur.

quatrième constat :
l'ensemble vissé permet de rigidifier le système mais il n’empêche pas les flexions en raison de son poids total
pour cela j'ai changé la queue d'aronde par une plus grande et j'y ai mis un anneau pour chercheur de chez primaluce que j'avais en réserve
rien ne se perd tout se transforme ![]()

cette solution soutient l'ensemble ; élimine la flexion et cela évite aussi de voir le système se "dévisse" en basculant par son poids
cinquième constat :
le sol 'Ex c'est du PEG et avec le soleil cela ne fait pas bon ménage. ça se déforme sous la chaleur !
un des moyens est d'acheter un écran de protection pour une somme frôlant les 40 euros. il se pose entre deux bagues allonges et permet ainsi l'utilisateur de se protéger du soleil lors de ces observations
pour mon Sol'Ex , j'ai ré-utilisé le déchet de la plaque centrale de mon support pour filtre solaire conception support pour filtre solaire .
Avec deux pattes de fixations pour fixer le tout sur l'anneau chercheur , cela fonctionne à merveille

c'est simple, efficace et pas cher . c'est peu dire ![]()

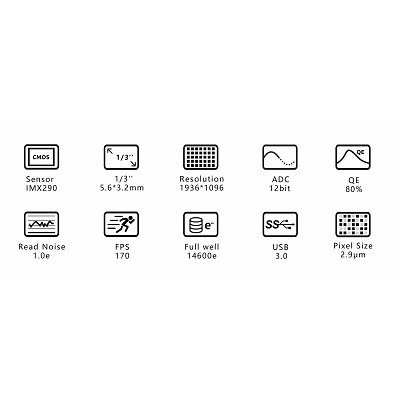
cela protège même en partie ma caméra Asi 183mm pro

vous voila donc prêt comme moi à passer au mode pratique de ce fantastique appareil que nous à offert C.buil ; la société Azur3Dprint et shelyak
bon ciel
Christophe
- En savoir plus…
- 0 commentaire
- 32 vues













































 =>
=>